Бортовой компьютер с навигацией для автомобиля — Яндекс.Авто
Установка ПоддержкаЯндекс.Авто — бортовой компьютер, который встраивается в автомобиль. Навигатор, Музыка, Алиса, интернет и большой экран.
Разработан специально для водителей
Навигация без телефона
Яндекс.Навигатор строит оптимальные маршруты с учётом пробок, ежедневно обновляет карты, предупреждает о ремонтных работах, камерах и знаках.
Работает даже без интернета
Музыка под рукой
Яндекс.Музыка запоминает треки, которые вам нравятся, и подбирает похожие. Даёт доступ к новым альбомам, станциям разных жанров и эпох, а также предлагает музыкальные подборки
Голосовое управление
 Скажите «Слушай, Алиса» и попросите ввести адрес, заехать на заправку, найти парковку
или поискать что-нибудь в интернете
Скажите «Слушай, Алиса» и попросите ввести адрес, заехать на заправку, найти парковку
или поискать что-нибудь в интернетеВсегда на связи
Интернет от МТС обеспечивает доступ сервисов к сети, а телефон позволяет разговаривать по громкой связи и не отвлекаться от дороги.
Построить маршрут в Яндекс.Навигаторе можно
без интернета, если заранее загрузить нужные карты. Информация о дорожной ситуации доступна, если бортовой компьютер подключен к интернету. Чтобы слушать новые альбомы, нужна оплаченная подписка на Яндекс.Музыку. Все функции Алисы доступны, если Яндекс.Авто подключен к интернету.
© 2017-2021 Яндекс 0+
производство шлифовально-полировальных машин и алмазного инструмента для устройства промышленных покрытий
Linolit® — международное предприятие по производству профессиональных шлифовально-полировальных машин, алмазного расходного инструмента, а также сопутствующих материалов и оборудования для устройства качественных, прочных и экологичных промышленных покрытий.
На сегодняшний день компания имеет развитую дилерскую сеть по всему миру с центральными офисами продаж:
на территории РФ в Москве и Екатеринбурге,
на территории Евросоюза – в Словении (Любляна).
Производственная площадка, на которой по европейской технологии собираются вся линейка оборудования, расположена в Свердловской области.
Linolit® — предприятие с полным циклом производства, имеет все необходимые цеха и службы для изготовления шлифовально-полировального оборудования: от конструкторского бюро до сборочного цеха и предпродажной подготовки.
Оборудование
Наше оборудование позволяет готовить все известные виды оснований под нанесение любых видов покрытий — от керамогранита и до полимерных наливных покрытий.
Главные достоинства продукции Linolit®:
высокая надежность,
большой срок службы за рамками гарантийного периода,
продуманная эргономика конструкций машин,
взвешенная ценовая политика.


Производство оборудования
Собственное производство и конструкторский отел позволяют нашей компании удовлетворять потребности клиентов, предлагая им качественное и современное оборудование. Компания постоянно ведет мониторинг технологий по устройству промышленных полов, разработки новых моделей и усовершенствование конструкций, элементов и деталей существующих машин с целью повышения их производительности и качества устройства полов.
Производство расходного инструмента
Производство расходного шлифовально-полировального инструмента также осуществляется в рамках собственного производства по разработанным технологиям «Linolit». Процесс производства включает в себя полный цикл работ — от производства алмазных сегментов до выпуска готовой продукции: шлифовальных/полировальных падов и франкфуртов, затирочных дисков и лопастей.
Дилерская сеть
Оборудование Linolit® востребовано не только на территории России, но и в странах Евросоюза.
Машины землеройные. Устройство буксирное. Технические требования – РТС-тендер
ГОСТ Р ИСО 10532-99
Группа Г45
Машины землеройные
УСТРОЙСТВО БУКСИРНОЕ
Технические требования
Earth-moving machinery. Machine-mounted retrieval device.
Performance requirements
ОКП 48 1000
Дата введения 2000-07-01
1 РАЗРАБОТАН И ВНЕСЕН Техническим комитетом по стандартизации ТК 295 «Машины землеройные»
2 ПРИНЯТ И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 30 ноября 1999 г.
3 Настоящий стандарт представляет собой полный аутентичный текст международного стандарта ИСО 10532-95 «Машины землеройные. Устройства буксирные. Технические требования»
4 ВВЕДЕН ВПЕРВЫЕ
1 Область применения
1.1 Настоящий стандарт распространяется на буксирные устройства, устанавливаемые на землеройных машинах по ГОСТ Р ИСО 6165 (далее — машины) и реализующие усилия, не превышающие 1000 кН.
Примечание — Величина усилия соответствует минимальному разрывному усилию, выдерживаемому канатом диаметром 40 мм группы 3 стальных канатов со стальным сердечником, в соответствии с ИСО 2408.
Требования 5.1, 5.2, разделов 3 и 4 настоящего стандарта являются обязательными, остальные требования — рекомендуемыми.
2 Нормативные ссылки
В настоящем стандарте использованы ссылки на следующие стандарты.
ГОСТ 27249-87 (ИСО 7132-84) Машины землеройные. Землевозы. Термины, определения и техническая характеристика для коммерческой документации
Землевозы. Термины, определения и техническая характеристика для коммерческой документации
ГОСТ 27536-87 (ИСО 7133-85) Машины землеройные. Самоходные скреперы. Термины, определения и техническая характеристика для коммерческой документации
ГОСТ 27922-88 (ИСО 6016-82) Машины землеройные. Методы измерения масс машин в целом, рабочего оборудования и составных частей
ГОСТ Р ИСО 6165-99 Машины землеройные. Классификация. Термины и определения
ИСО 2408-85* Стальные канаты для общих целей. Характеристики
ИСО 9248-92* Машины землеройные. Единицы измерения размеров, эксплуатационных показателей, производительности и допуски на измерения
_____________
* Оригиналы международных стандартов ИСО находятся во ВНИИКИ и ВНИИНМАШ Госстандарта России
3 Определения
В настоящем стандарте используют следующие термины с соответствующими определениями:
3.1 буксирное устройство: Приспособление, установленное на машине и предназначенное для закрепления на нем гибкого или жесткого тягового элемента (буксировочный канат, цепь или жесткий буксировочный стержень), закрепляемого на аналогичном приспособлении другой машины, перемещение которой своим ходом невозможно.
3.2 максимальное тяговое усилие буксирного устройства: Усилие, которое при воздействии на буксирное устройство создает в его металлоконструкции напряжение, равное пределу текучести материала, из которого устройство изготовлено.
3.3 масса машины для расчета буксирного устройства:
3.3.1 для самоходных скреперов и землевозов: Масса нагруженной машины по ГОСТ 27536 и ГОСТ 27249 соответственно;
3.3.2 для всех других типов машин: Эксплуатационная масса машины по ГОСТ 27922.
3.4 максимальный угол тягового усилия: Угол, равный 20°, являющийся углом вершины конуса, ось которого представляет собой горизонтальную линию, проходящую через точку крепления тягового элемента к буксирному устройству машины параллельно ее продольной оси и без пересечения с деталями машины.
4 Технические требования
4.1 Тяговое усилие буксирного устройства , Н, рассчитывают:
для землеройных машин, кроме самоходных скреперов и землевозов с донной разгрузкой, по формуле
,
для самоходных скреперов и землевозов по формуле
,
где — масса машины, рассчитанная в соответствии с 3. 3, кг;
3, кг;
— ускорение свободного падения, м/с.
4.2 Буксирное устройство машины должно выдерживать тяговое усилие, определенное по 4.1, при максимальном угле его приложения.
4.3 Буксирное устройство должно быть изготовлено из материалов, на которых можно визуально определить признаки пластической деформации перед повреждением (переломом) так, чтобы было очевидно, что приспособление перегружено и должно быть отремонтировано или заменено.
4.4 В конструкции буксирного устройства должны быть учтены размеры петли тягового проволочного каната или карабина, способных выдерживать усилия, определенные по 4.1.
4.5 Если используют буксирное устройство с запорным пальцем, то должны быть предусмотрены приспособления, удерживающие палец на месте во время использования и предотвращающие его потерю, если он не применяется.
4.6 Буксирное устройство может быть установлено спереди и (или) сзади машины в месте, легко доступном для присоединения тягового элемента.
Для машин с эксплуатационной массой более 100000 кг должно быть предусмотрено второе буксирное устройство, соответствующее настоящему стандарту, установленное на том же конце машины.
5 Методы испытаний
5.1 Соответствие буксирного устройства и его опорной конструкции на машине требованиям настоящего стандарта должно быть подтверждено испытаниями или расчетом.
5.2 При испытаниях буксирного устройства прилагают одно тяговое усилие при максимальном угле в горизонтальной плоскости и одно тяговое усилие при максимальном угле в вертикальной плоскости. Прикладываемые усилия должны соответствовать указанным в 4.1.
5.3 Погрешность средств измерений должна соответствовать требованиям ИСО 9248.
Текст документа сверен по:
официальное издание
М: ИПК Издательство стандартов, 2000
15.02.04 Специальные машины и устройства
Все городаАбаканАлатырьАлматыАльметьевскАнадырьАнапаАнгарскАрзамасАрмавирАртёмАрхангельскАстраханьАчинскБалаковоБалашовБарнаулБелгородБерезникиБийскБиробиджанБирскБлаговещенскБокситогорскБратскБрянскБугульмаВеликие ЛукиВеликий НовгородВладивостокВладикавказВладимирВолгоградВолжскийВологдаВолховВоронежВоткинскВыборгГорно-АлтайскГрозныйДербентДзержинскДимитровградДомодедовоДубайДушанбеЕвпаторияЕкатеринбургЕлабугаЕлецЕссентукиЖуковскийЗеленоградЗлатоустИвановоИжевскИркутскИшимЙошкар-ОлаКазаньКалининградКалугаКаменск-УральскийКамышинКарачаевскКемеровоКерчьКировКисловодскКовровКоломнаКомсомольск-на-АмуреКоролёвКостромаКрасногорскКраснодарКрасноярскКрымКуйбышевКурганКурскКызылЛенинск-КузнецкийЛипецкЛюберцыМагаданМагасМагнитогорскМайкопМахачкалаМеждуреченскМиассМинскМоскваМурманскМуромМытищиНабережные ЧелныНазраньНальчикНаро-ФоминскНаходкаНевинномысскНерюнгриНефтекамскНижневартовскНижнекамскНижний НовгородНижний ТагилНовозыбковНовокузнецкНовокуйбышевскНовомосковскНовороссийскНовосибирскНовочеркасскНовошахтинскНорильскНоябрьскНур-Султан (Астана)ОбнинскОдинцовоОктябрьскийОмскОрёлОренбургОрскПензаПермьПетрозаводскПетропавловск-КамчатскийПодольскПрокопьевскПсковПушкинПушкиноПущиноПятигорскРостовРостов-на-ДонуРубцовскРыбинскРязаньСалаватСалехардСамараСанкт-ПетербургСаранскСарапулСаратовСевастопольСеверодвинскСеверскСергиев ПосадСерпуховСимферопольСлавянск-на-КубаниСмоленскСосновый БорСочиСтавропольСтарый ОсколСтерлитамакСтупиноСургутСызраньСыктывкарТаганрогТамбовТараТашкентТверьТобольскТольяттиТомскТроицкТуапсеТулаТюменьУлан-БаторУлан-УдэУльяновскУссурийскУфаХабаровскХанты-МансийскХасавюртХимкиЧайковскийЧебоксарыЧелябинскЧереповецЧеркесскЧитаШадринскШахтыШуяЭлектростальЭлистаЭнгельсЮжно-СахалинскЯкутскЯлтаЯрославль
Насколько безопасны умные устройства в вашей машине?
Мы частенько рассказываем об уязвимостях Интернета вещей, начиная от смарт-камер и заканчивая секс-игрушками. На этот раз исследователи «Лаборатории Касперского» решили выяснить, пройдут ли проверку на безопасность умные гаджеты для автомобилей.
На этот раз исследователи «Лаборатории Касперского» решили выяснить, пройдут ли проверку на безопасность умные гаджеты для автомобилей.
Что протестировали эксперты «Лаборатории Касперского»
Для теста мы выбрали сразу несколько устройств разного назначения: пару сканеров для диагностики неполадок, систему для наблюдения за давлением и температурой в шинах, интернет-зависимый GPS-трекер, видеорегистратор и умную сигнализацию.
OBD-сканер против сканера Bluetooth
Что исследовали? Устройство, которое подключается к разъему OBD в автомобиле и передает на подключенный по Bluetooth смартфон данные о скорости, разгоне, оборотах двигателя и так далее. Данные можно наблюдать во время заезда, а впоследствии их можно наложить на видеозапись в приложении.
Что обнаружили? Серийный номер сканера и пароль, необходимые для подключения к нему, совпадают с MAC-адресом сканера. Проблема в том, что сканер транслирует свой MAC-адрес по Bluetooth — его видно всем устройствам на расстоянии десятков метров.
Таким образом, для подключения к устройству потенциальному злоумышленнику нужно всего лишь просканировать эфир и считать его MAC-адрес.
Чем грозит? К счастью, протестированный сканер только считывает информацию автомобиля и не влияет на его поведение. Поэтому даже если кто-то посторонний сможет подключиться к гаджету, он не сможет навредить водителю. Разве что просмотрит запись заезда и показания машины.
Другой OBD-сканер: провод есть — ума не надо
Что исследовали? Проводной OBD-сканер для диагностики автомобиля.
Что обнаружили? Производитель устройства приложил немало усилий к тому, чтобы защитить его прошивку. Перепробовав несколько методов, эксперты «Лаборатории Касперского» все же смогли извлечь прошивку из памяти устройства и нашли возможность модифицировать ее.
Однако оказалось, что сканер имеет слишком маленький объем памяти — ее хватает лишь для чтения показаний и ведения журнала ошибок. Использовать устройство в качестве плацдарма для взлома электронных систем автомобиля невозможно.
Использовать устройство в качестве плацдарма для взлома электронных систем автомобиля невозможно.
Чем грозит? Пользователям сканера нечего опасаться. Производитель гаджета снабдил его ровно теми характеристиками, которых достаточно только для выполнения основной задачи. Поэтому, кроме доступа к данным об ошибках, взлом устройства ничем не грозит.
Система мониторинга давления и температуры в шинах
Что исследовали? Основная задача системы, как несложно догадаться, — показывать данные о температуре и давлении в шинах, а также оповещать водителя, если они достигают критически низких или высоких значений. В ее состав входят четыре датчика (по одному на колесо), экран и блок управления.
Что выяснили? Датчики передают информацию в блок управления по радио, и эксперты решили попробовать перехватить и подменить данные с помощью SDR (программно определяемой радиосистемы). Для этого нужно знать серийный номер каждого датчика и то, какая часть исходящего от него сигнала отвечает за данные об изменении температуры и давления колеса. После нескольких замеров экспертам удалось это установить.
После нескольких замеров экспертам удалось это установить.
На практике, чтобы подменить сигнал, необходимо поддерживать постоянную связь с датчиками: держать антенну приемника направленной на автомобиль жертвы и двигаться с ним на одной скорости.
Чем грозит? Подмена сигнала с датчиков позволяет вывести на экран системы предупреждение о несуществующих неполадках, чтобы водитель остановил автомобиль. Однако для успешной атаки нужно находиться в непосредственной близости от цели. Учитывая это, владельцам устройства вряд ли стоит волноваться и срочно возвращать покупку в магазин.
Самая умная сигнализация
Что исследовали? Умную охранную систему, с помощью которой можно закрывать и открывать двери автомобиля и запускать двигатель. Управлять можно либо с брелока, либо по Bluetooth через Android-приложение.
Что выяснили? Брелок сигнализации общается с охранной системой по зашифрованному каналу. Также разработчики ответственно подошли к защите Bluetooth-соединения для управления со смартфона: устройства сопрягаются во время установки сигнализации, подключиться с другого смартфона не получится.
Наиболее уязвимой частью охранной системы оказалось приложение. Во-первых, оно не запрашивает пароль или биометрические данные при входе. Отдавать команды охранной системе тоже можно без дополнительной авторизации. Иными словами, украв у вас телефон с незаблокированным экраном, преступник получит автомобиль в подарок.
Вторая угроза, которой стоит опасаться пользователю «умной» сигнализации, — это заражение смартфона. Троян, имитирующий движения пальца по экрану, позволяет сравнительно легко открыть машину и запустить двигатель. Правда, при одном условии: смартфон владельца в этот момент должен находиться неподалеку от авто и быть подключенным к сигнализации по Bluetooth.
Чем это грозит? Несмотря на то, что экспертам удалось подобрать работающий механизм атаки, он едва ли применим в реальной жизни. Во-первых, сам по себе он довольно сложен. Во-вторых, требует целенаправленного заражения конкретного смартфона. В-третьих, для реализации плана смартфон владельца должен находиться рядом с машиной, что усложняет незаметную атаку. К тому же от такой атаки легко уберечься: достаточно установить на смартфон надежную защиту и не забывать блокировать экран паролем.
К тому же от такой атаки легко уберечься: достаточно установить на смартфон надежную защиту и не забывать блокировать экран паролем.
GPS-трекер
Что исследовали? Обычный GPS-трекер, только подключенный к Интернету и передающий данные о перемещениях автомобиля. Такой трекер может использоваться, чтобы отслеживать курьеров и посылки или защитить арендуемое оборудование.
Что выяснили? Взлом учетной записи администратора серверной части GPS-трекера позволит получить доступ к базе данных пользователей — маршрутам передвижения, финансовой информации, контактам, именам и многому другому. Более вероятный — из-за отсутствия двухфакторной аутентификации — взлом пользовательского аккаунта позволит получить доступ к данным конкретного клиента.
Чем грозит? Теоретически взлом сервера GPS-трекера можно использовать для слежки и сбора данных. Однако, по мнению наших экспертов, вероятность такой атаки невысока.
Улыбнитесь, вас снимает безопасная камера!
Что исследовали? Умный видеорегистратор. Гаджет откликается на голосовые команды, умеет самостоятельно определять потенциально опасные ситуации и сохранять записи о них, адаптироваться к разному уровню освещения и, естественно, взаимодействовать со смартфоном или планшетом через Wi-Fi.
Гаджет откликается на голосовые команды, умеет самостоятельно определять потенциально опасные ситуации и сохранять записи о них, адаптироваться к разному уровню освещения и, естественно, взаимодействовать со смартфоном или планшетом через Wi-Fi.
Что выяснили? В теории, подключив к камере собственный смартфон, преступники могли бы натворить бед. Однако в этом случае безопасность системы оказалась на уровне. Например, она не только защищена паролем, который можно поменять, но и советует пользователю при первом подключении выбрать собственный пароль вместо заданного по умолчанию. А чтобы связать новый телефон с камерой, нужно еще и нажать специальную кнопку на самом видеорегистраторе.
Чем это грозит? Без физического доступа к камере преступник не сможет ни повлиять на ее работу, ни заполучить видеозаписи с нее. А если уж ему удалось добраться до камеры лично, то гораздо проще будет украсть карту памяти.
Выводы
С точки зрения практических атак защита большинства протестированных IoT-устройств оказалась вполне адекватной. Уязвимости в них есть, но их сложно было бы использовать для взлома в реальной жизни. Похоже, производители наконец-то начали уделять больше внимания безопасности своих продуктов. И это позволяет надеяться, что в дальнейшем ситуация на рынке «умных» устройств будет только улучшаться.
Уязвимости в них есть, но их сложно было бы использовать для взлома в реальной жизни. Похоже, производители наконец-то начали уделять больше внимания безопасности своих продуктов. И это позволяет надеяться, что в дальнейшем ситуация на рынке «умных» устройств будет только улучшаться.
Подробнее о процессе поиска уязвимостей в автомобильных гаджетах и о находках наших экспертов можете почитать в исследовании на Securelist.
Командлеты для настройки устройств постоянной памяти для виртуальных машин Hyper-V
- Чтение занимает 2 мин
В этой статье
Область применения: Windows Server 2019Applies To: Windows Server 2019
Эта статья предоставляет системным администраторам и ИТ-специалистам сведения о настройке виртуальных машин Hyper-V с энергонезависимой памятью (память класса хранения или устройство NVDIMM). This article provides system administrators and IT Pros with information about configuring Hyper-V VMs with persistent memory (aka storage class memory or NVDIMM). Устройства энергонезависимой памяти NVDIMM-N, совместимые с ЖДЕК, поддерживаются в Windows Server 2016 и Windows 10 и предоставляют доступ на уровне байт к очень низким временным устройствам без временных задержек.JDEC-compliant NVDIMM-N persistent memory devices are supported in Windows Server 2016 and Windows 10 and provide byte-level access to very low latency non-volatile devices. Устройства с постоянной памятью виртуальной машины поддерживаются в Windows Server 2019.VM persistent memory devices are supported in Windows Server 2019.
This article provides system administrators and IT Pros with information about configuring Hyper-V VMs with persistent memory (aka storage class memory or NVDIMM). Устройства энергонезависимой памяти NVDIMM-N, совместимые с ЖДЕК, поддерживаются в Windows Server 2016 и Windows 10 и предоставляют доступ на уровне байт к очень низким временным устройствам без временных задержек.JDEC-compliant NVDIMM-N persistent memory devices are supported in Windows Server 2016 and Windows 10 and provide byte-level access to very low latency non-volatile devices. Устройства с постоянной памятью виртуальной машины поддерживаются в Windows Server 2019.VM persistent memory devices are supported in Windows Server 2019.
Создание постоянного устройства памяти для виртуальной машиныCreate a persistent memory device for a VM
Используйте командлет New-VHD , чтобы создать постоянное устройство памяти для виртуальной машины.Use the New-VHD cmdlet to create a persistent memory device for a VM. Устройство должно быть создано на существующем томе DAX NTFS.The device must be created on an existing NTFS DAX volume. Новое расширение имени файла (. вхдпмем) используется для указания того, что устройство является устройством постоянного обмена памятью.The new filename extension (.vhdpmem) is used to specify that the device is a persistent memory device. Поддерживается только фиксированный формат VHD-файла.Only the fixed VHD file format is supported.
Устройство должно быть создано на существующем томе DAX NTFS.The device must be created on an existing NTFS DAX volume. Новое расширение имени файла (. вхдпмем) используется для указания того, что устройство является устройством постоянного обмена памятью.The new filename extension (.vhdpmem) is used to specify that the device is a persistent memory device. Поддерживается только фиксированный формат VHD-файла.Only the fixed VHD file format is supported.
Пример: New-VHD d:\VMPMEMDevice1.vhdpmem -Fixed -SizeBytes 4GBExample: New-VHD d:\VMPMEMDevice1.vhdpmem -Fixed -SizeBytes 4GB
Создание виртуальной машины с постоянным контроллером памятиCreate a VM with a persistent memory controller
Используйте командлет New-VM , чтобы создать виртуальную машину поколения 2 с указанными размером памяти и путем к образу VHDX.Use the New-VM cmdlet to create a Generation 2 VM with specified memory size and path to a VHDX image. Затем используйте Add-вмпмемконтроллер , чтобы добавить контроллер энергонезависимой памяти к виртуальной машине.Then, use Add-VMPmemController to add a persistent memory controller to a VM.
Затем используйте Add-вмпмемконтроллер , чтобы добавить контроллер энергонезависимой памяти к виртуальной машине.Then, use Add-VMPmemController to add a persistent memory controller to a VM.
Пример.Example:
New-VM -Name "ProductionVM1" -MemoryStartupBytes 1GB -VHDPath c:\vhd\BaseImage.vhdx
Add-VMPmemController ProductionVM1x
Подключение устройства энергонезависимой памяти к виртуальной машинеAttach a persistent memory device to a VM
Использование Add-вмхарддискдриве для подключения устройства энергонезависимой памяти к виртуальной машинеUse Add-VMHardDiskDrive to attach a persistent memory device to a VM
Пример: Add-VMHardDiskDrive ProductionVM1 PMEM -ControllerLocation 1 -Path D:\VPMEMDevice1.vhdpmemExample: Add-VMHardDiskDrive ProductionVM1 PMEM -ControllerLocation 1 -Path D:\VPMEMDevice1. vhdpmem
vhdpmem
Устройства с энергопотреблением памяти в виртуальной машине Hyper-V отображаются в виде постоянного устройства памяти для использования и управления гостевой операционной системой.Persistent memory devices within a Hyper-V VM appear as a persistent memory device to be consumed and managed by the guest operating system. Гостевые операционные системы могут использовать устройство в качестве блока или тома DAX.Guest operating systems can use the device as a block or DAX volume. Если устройства энергонезависимой памяти в виртуальной машине используются в качестве тома DAX, они получают преимущества от небольшого количества байт на уровне байтов (без виртуализации ввода-вывода в пути кода).When persistent memory devices within a VM are used as a DAX volume, they benefit from low latency byte-level address-ability of the host device (no I/O virtualization on the code path).
Примечание
Постоянная память поддерживается только для виртуальных машин Hyper-V Gen2. Persistent memory is only supported for Hyper-V Gen2 VMs. Динамическая миграция и миграция хранилища не поддерживаются для виртуальных машин с энергонезависимой памятью.Live Migration and Storage Migration are not supported for VMs with persistent memory. Рабочие контрольные точки виртуальных машин не включают постоянное состояние памяти.Production checkpoints of VMs do not include persistent memory state.
Persistent memory is only supported for Hyper-V Gen2 VMs. Динамическая миграция и миграция хранилища не поддерживаются для виртуальных машин с энергонезависимой памятью.Live Migration and Storage Migration are not supported for VMs with persistent memory. Рабочие контрольные точки виртуальных машин не включают постоянное состояние памяти.Production checkpoints of VMs do not include persistent memory state.
Код ТН ВЭД 8471800000. Устройства вычислительных машин, прочие. Товарная номенклатура внешнеэкономической деятельности ЕАЭС
Технические средства для инвалидов
Вычислительные машины и их блоки. . (НДС):
. (НДС):
0% — 37. Технические средства для оборудования помещений, используемые только для профилактики инвалидности или реабилитации инвалидов, включая обучение
0% — 38. Технические средства для развития у инвалидов навыков ориентации в пространстве, самостоятельного передвижения, повседневного самообслуживания, для тренировки речи, письма и общения, умения различать и сравнивать предметы, средства для обучения программированию, информатике, правилам личной безопасности
0% — 36. Специальные технические средства для обучения инвалидов и осуществления ими трудовой деятельности, которые могут быть использованы только для профилактики инвалидности или реабилитации инвалидов
Специальные технические средства для обучения инвалидов и осуществления ими трудовой деятельности, которые могут быть использованы только для профилактики инвалидности или реабилитации инвалидов
20% — Прочие
Комплектующие для гражданских воздушных судов
Реакторы ядерные; котлы.. (НДС-авиазапчасти):
Федеральный закон 117-ФЗ от 05. 08.2000 ГД РФ
08.2000 ГД РФ
0% — авиационные двигатели, запасные части и комплектующие изделия, предназначенные для строительства, ремонта и (или) модернизации на территории Российской Федерации гражданских воздушных судов, при условии представления в таможенный орган документа, подтверждающего целевое назначение ввозимого товара
20% — Прочие
Разница между устройством и машиной
Машины и устройства есть везде — будь то потолочный вентилятор, холодильник или смартфон. Они созданы для того, чтобы сделать нашу повседневную жизнь намного проще, выполняя простые и самые сложные задачи за считанные секунды. Во-первых, компьютер — это устройство, предназначенное для простого вычисления одной или нескольких вычислительных функций, или смартфон, который позволяет нам создавать и отправлять электронные письма, отправлять сообщения, хранить информацию, устанавливать приложения вместе с базовыми функциями создания звонки — все в одном устройстве. Разница между машиной и устройством очень тонкая, и нет простого способа отличить их.
Разница между машиной и устройством очень тонкая, и нет простого способа отличить их.
Что такое машина?
Машина представляет собой комбинацию из шести простых машин — наклонной плоскости, шкива, рычага, клина, винта, колеса и оси — которые используются почти повсеместно. Проще говоря, машина — это все, что снижает затраты, время и человеческие усилия. Это инструмент или набор инструментов, каждый из которых выполняет определенную функцию, предназначенный для выполнения одной или нескольких операций вместе с использованием механической энергии.Он может быть автоматизированным или управляемым человеком, что увеличивает возможности человека для выполнения запланированной операции. Короче говоря, машины — это просто часть оборудования, используемая для упрощения и плавности работы.
Что такое устройство?
Устройство может относиться к механическому или электронному инструменту, специально разработанному для определенной цели, что означает, что оно предназначено для упрощения работы машины и отсутствия ошибок. Это скорее набор машин, нацеленных на определенное действие или процедуру.Например, часы предназначены для отслеживания времени или смартфон, который представляет собой набор из множества различных частей, каждая из которых предназначена для определенной задачи. Короче говоря, устройство представляет собой более сложную версию машины или набора машин, которые могут иметь электрический или ручной привод.
Это скорее набор машин, нацеленных на определенное действие или процедуру.Например, часы предназначены для отслеживания времени или смартфон, который представляет собой набор из множества различных частей, каждая из которых предназначена для определенной задачи. Короче говоря, устройство представляет собой более сложную версию машины или набора машин, которые могут иметь электрический или ручной привод.
Разница между устройством и машиной
Определение устройства и машины
Машина — это устройство или инструмент, который состоит из одной или нескольких частей, каждая из которых предназначена для определенной задачи или функции, объединенных вместе для выполнения определенной задачи с использованием энергии в качестве энергии.Машина — это не что иное, как часть оборудования, которая приводится в действие электрической, механической, тепловой или химической энергией для выполнения одной или нескольких операций. Устройство — это довольно сложная версия машины, предназначенная для определенной цели. В отличие от машин, которые обычно ограничены определенной операцией, устройство может представлять собой множество вещей, спроектированных таким образом, чтобы обеспечить бесперебойную работу машины.
В отличие от машин, которые обычно ограничены определенной операцией, устройство может представлять собой множество вещей, спроектированных таким образом, чтобы обеспечить бесперебойную работу машины.
Происхождение устройства и машины
Идея простых машин была признана греческим философом по имени Архимед примерно в 3 году до нашей эры, и его основное внимание было сосредоточено на изучении архимедовых простых машин: рычага, шкива и винта.Он также был первым, кто понял концепцию механической энергии в рычаге. С человеческой точки зрения, идея механических устройств была результатом способностей человека к ведению войны, таких как арбалеты, появившиеся около 500 г. до н.э. Первым портативным устройством были часы, которые начали использовать около 1500 г. до н.э., но превратились в современные механические устройства. На протяжении тысяч лет устройства разнообразными способами улучшали нашу повседневную жизнь.
Назначение устройства и машины
Машины имеют уникальную цель — максимально увеличить человеческие усилия для сокращения затрат и времени, тем самым увеличивая производство. Вы можете называть машину комбинацией устройств, которые могут быть автоматизированными или управляемыми человеком. Основное предназначение машины — облегчить работу. Устройство, в общем смысле, — это то, что предназначено для определенной цели, например, устройство GPS, которое используется для отслеживания перемещений и навигации, или принтер, если на то пошло, которое является устройством, используемым специально для печати документов.
Вы можете называть машину комбинацией устройств, которые могут быть автоматизированными или управляемыми человеком. Основное предназначение машины — облегчить работу. Устройство, в общем смысле, — это то, что предназначено для определенной цели, например, устройство GPS, которое используется для отслеживания перемещений и навигации, или принтер, если на то пошло, которое является устройством, используемым специально для печати документов.
Типы устройств и машин
Термин «машина» используется для обозначения шести классических типов, определенных учеными эпохи Возрождения как наклонная плоскость, шкив, рычаг, винт, колесо и ось, а также клин.Это механизм, с помощью которого сила, приложенная к одной части, передается другой части, используя движение в качестве источника энергии. Эти шесть простых машин обладают особыми характеристиками и предназначены только для уменьшения человеческих усилий простым движением или толчком. Устройства классифицируются в зависимости от контекста. Например, когда речь идет о компьютерном периферийном устройстве, оно делится на устройства ввода, вывода и хранения.
Например, когда речь идет о компьютерном периферийном устройстве, оно делится на устройства ввода, вывода и хранения.
Устройство и машина: сравнительная таблица
Сводная информация об устройстве vs.Станок
Каждая машина — это устройство, но не каждое устройство — это машина. Оба термина могут использоваться как взаимозаменяемые, потому что разница между ними довольно тонкая, и между машиной и устройством есть тонкая грань, когда дело доходит до инженерных работ. Машина может быть инструментом или набором инструментов, которые используют некоторый вид энергии для выполнения одной или нескольких операций, и могут управляться как человеком, так и автоматизированы. Устройство — это все, что упрощает и упрощает работу машины.Это электронный или механический инструмент, предназначенный для определенной цели, например, часы, которые специально предназначены для показа времени.
Сагар Хиллар — плодовитый автор контента / статей / блогов, работающий старшим разработчиком / писателем контента в известной фирме по обслуживанию клиентов, базирующейся в Индии. У него есть желание исследовать самые разные темы и разрабатывать высококачественный контент, чтобы его можно было лучше всего читать. Благодаря его страсти к писательству, он имеет более 7 лет профессионального опыта в написании и редактировании услуг на самых разных печатных и электронных платформах.
У него есть желание исследовать самые разные темы и разрабатывать высококачественный контент, чтобы его можно было лучше всего читать. Благодаря его страсти к писательству, он имеет более 7 лет профессионального опыта в написании и редактировании услуг на самых разных печатных и электронных платформах.Вне своей профессиональной жизни Сагар любит общаться с людьми из разных культур и происхождения. Можно сказать, что он любопытен по натуре. Он считает, что каждый — это опыт обучения, и это приносит определенное волнение, своего рода любопытство, позволяющее продолжать работу. Поначалу это может показаться глупым, но через некоторое время это расслабляет и облегчает начало разговора с совершенно незнакомыми людьми — вот что он сказал ».
Последние сообщения Сагара Хиллара (посмотреть все): Если вам понравилась эта статья или наш сайт.Пожалуйста, расскажите об этом. Поделитесь им с друзьями / семьей.
Укажите
Сагар Хиллар. «Разница между устройством и машиной». DifferenceBetween.net. 10 мая 2018.
DifferenceBetween.net. 10 мая 2018.
Станок | Британника
Машина , устройство, имеющее уникальное назначение, которое увеличивает или заменяет усилия человека или животных для выполнения физических задач. В эту широкую категорию входят такие простые устройства, как наклонная плоскость, рычаг, клин, колесо и ось, шкив и винт (так называемые простые машины), а также такие сложные механические системы, как современный автомобиль.
простые машиныШесть простых машин для преобразования энергии в работу.
Британская энциклопедия, Inc.Британская викторина
Машины и производство
От сверления отверстий и перевозки грузов до автомобильных двигателей и их производства — ответьте на эти вопросы и проверьте свои знания в области машиностроения и производства в этой викторине.
Работа машины может включать преобразование химической, тепловой, электрической или ядерной энергии в механическую, или наоборот, или ее функция может заключаться просто в изменении и передаче сил и движений. Все машины имеют вход, выход, а также устройство преобразования или модификации и передачи.
Машины, которые получают энергию от естественного источника, такого как потоки воздуха, движущуюся воду, уголь, нефть или уран, и преобразуют ее в механическую энергию, называются первичными двигателями.Ветряные мельницы, водяные колеса, турбины, паровые двигатели и двигатели внутреннего сгорания являются основными двигателями. В этих машинах входные параметры меняются; Выходы обычно представляют собой вращающиеся валы, которые можно использовать в качестве входов для других машин, таких как электрические генераторы, гидравлические насосы или воздушные компрессоры. Все три последних устройства можно отнести к генераторам; их выходы электрической, гидравлической и пневматической энергии могут использоваться в качестве входов для электрических, гидравлических или пневматических двигателей. Эти двигатели могут использоваться для привода машин с различными выходами, таких как оборудование для обработки материалов, упаковки или транспортировки, или такое оборудование, как швейные машины и стиральные машины.Все машины последнего типа и все другие машины, не являющиеся ни первичными двигателями, ни генераторами, ни двигателями, могут быть классифицированы как операторы. В эту категорию также входят инструменты с ручным управлением всех видов, такие как вычислительные машины и пишущие машинки.
Эти двигатели могут использоваться для привода машин с различными выходами, таких как оборудование для обработки материалов, упаковки или транспортировки, или такое оборудование, как швейные машины и стиральные машины.Все машины последнего типа и все другие машины, не являющиеся ни первичными двигателями, ни генераторами, ни двигателями, могут быть классифицированы как операторы. В эту категорию также входят инструменты с ручным управлением всех видов, такие как вычислительные машины и пишущие машинки.
В некоторых случаях машины всех категорий объединяются в одно устройство. Например, в дизель-электрическом локомотиве дизельный двигатель является первичным двигателем, который приводит в движение электрогенератор, который, в свою очередь, подает электрический ток на двигатели, приводящие в движение колеса.
Получите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишись сейчасКомпоненты машин в автомобиле
В рамках введения в компоненты машин некоторые образцы, поставляемые автомобилем, представляют ценность. В автомобиле основная проблема заключается в том, чтобы использовать взрывной эффект бензина, чтобы обеспечить вращение задних колес. Взрыв бензина в цилиндрах толкает поршни вниз, и передача и преобразование этого поступательного (линейного) движения во вращательное движение коленчатого вала осуществляется шатунами, которые соединяют каждый поршень с кривошипами, которые являются частью коленчатого вала. .Комбинация поршня, цилиндра, кривошипа и шатуна известна как кривошипно-ползунковый механизм; это широко используемый метод преобразования поступательного движения во вращение (как в двигателе) или вращения в поступательное движение (как в насосе).
В автомобиле основная проблема заключается в том, чтобы использовать взрывной эффект бензина, чтобы обеспечить вращение задних колес. Взрыв бензина в цилиндрах толкает поршни вниз, и передача и преобразование этого поступательного (линейного) движения во вращательное движение коленчатого вала осуществляется шатунами, которые соединяют каждый поршень с кривошипами, которые являются частью коленчатого вала. .Комбинация поршня, цилиндра, кривошипа и шатуна известна как кривошипно-ползунковый механизм; это широко используемый метод преобразования поступательного движения во вращение (как в двигателе) или вращения в поступательное движение (как в насосе).
Для впуска бензиновоздушной смеси в цилиндры и отвода сгоревших газов используются клапаны; они открываются и закрываются за счет заклинивания кулачков (выступов) на вращающемся распределительном валу, который приводится в движение от коленчатого вала шестернями или цепью.
В четырехтактном двигателе с восемью цилиндрами коленчатый вал получает импульс в некоторой точке по своей длине каждые четверть оборота. Чтобы сгладить влияние этих прерывистых импульсов на частоту вращения коленчатого вала, используется маховик. Это тяжелое колесо, прикрепленное к коленчатому валу, которое своей инерцией противодействует любым колебаниям скорости и смягчает их.
Чтобы сгладить влияние этих прерывистых импульсов на частоту вращения коленчатого вала, используется маховик. Это тяжелое колесо, прикрепленное к коленчатому валу, которое своей инерцией противодействует любым колебаниям скорости и смягчает их.
Поскольку крутящий момент (сила вращения), который он передает, зависит от его скорости, двигатель внутреннего сгорания не может быть запущен под нагрузкой. Чтобы автомобильный двигатель можно было запустить в ненагруженном состоянии, а затем подключить его к колесам без остановки, необходимы сцепление и трансмиссия.Первый устанавливает и разрывает соединение между коленчатым валом и трансмиссией, тогда как последний изменяет конечными шагами соотношение между входной и выходной скоростями и крутящими моментами трансмиссии. На низкой передаче скорость на выходе низкая, а крутящий момент на выходе выше, чем крутящий момент двигателя, поэтому автомобиль можно начать движение; на высокой передаче автомобиль движется со значительной скоростью, а крутящий момент и скорость равны.
Оси, к которым прикреплены колеса, содержатся в картере заднего моста, который закреплен на задних пружинах и приводится в движение от трансмиссии приводным валом.Когда автомобиль движется и пружины изгибаются в ответ на неровности дороги, корпус перемещается относительно трансмиссии; Чтобы разрешить это движение, не мешая передаче крутящего момента, к каждому концу приводного вала прикреплен универсальный шарнир.
Приводной вал перпендикулярен задним мостам. Прямоугольное соединение обычно выполняется с коническими зубчатыми колесами, имеющими такое передаточное отношение, при котором оси вращаются со скоростью от одной трети до одной четвертой скорости приводного вала. Корпус заднего моста также содержит дифференциал, который позволяет обоим задним колесам приводиться в движение от одного источника и вращаться с разной скоростью при повороте.
Как и все движущиеся механические устройства, автомобили не могут избежать воздействия трения. В двигателе, трансмиссии, картере заднего моста и всех подшипниках трение нежелательно, так как оно увеличивает мощность, требуемую от двигателя; смазка уменьшает, но не устраняет это трение. С другой стороны, трение между шинами и дорогой, а также в тормозных колодках делает возможным сцепление и торможение. Ремни, приводящие в движение вентилятор, генератор и другие аксессуары, зависят от трения.Трение также полезно при работе сцепления.
С другой стороны, трение между шинами и дорогой, а также в тормозных колодках делает возможным сцепление и торможение. Ремни, приводящие в движение вентилятор, генератор и другие аксессуары, зависят от трения.Трение также полезно при работе сцепления.
Некоторые из перечисленных выше устройств встречаются в машинах всех категорий, собранных множеством способов для выполнения всех видов физических задач. Функция большинства этих основных механических устройств заключается в передаче и изменении силы и движения. Другие устройства, такие как пружины, маховики, валы и крепежные детали, выполняют дополнительные функции.
Машина может быть дополнительно определена как устройство, состоящее из двух или более устойчивых, относительно ограниченных частей, которые могут служить для передачи и изменения силы и движения для выполнения работы.Требование, чтобы части машины были стойкими, подразумевает, что они способны выдерживать приложенные нагрузки без сбоев или потери функции. Хотя большинство деталей машин представляет собой твердые металлические тела подходящих размеров, также используются неметаллические материалы, пружины, органы давления жидкости и органы натяжения, такие как ремни.
Хотя большинство деталей машин представляет собой твердые металлические тела подходящих размеров, также используются неметаллические материалы, пружины, органы давления жидкости и органы натяжения, такие как ремни.
Ограниченное движение
Наиболее отличительной особенностью машины является то, что части соединены между собой и направляются таким образом, что их движения относительно друг друга ограничены.По отношению к блоку, например, поршень поршневого двигателя вынужден цилиндром двигаться по прямой траектории; точки на коленчатом валу ограничены движением коренных подшипников по круговой траектории; никакие другие формы относительного движения невозможны.
На некоторых машинах детали ограничены только частично. Если части соединены между собой пружинами или фрикционными элементами, траектории частей относительно друг друга могут быть фиксированными, но на движения частей могут влиять жесткость пружин, трение и массы частей.
Если все части машины представляют собой сравнительно жесткие элементы, прогибы которых под нагрузкой незначительны, то ограничение можно считать полным, а относительные движения частей можно изучать без учета сил, которые их создают. Для заданной частоты вращения коленчатого вала поршневого двигателя, например, можно рассчитать соответствующие частоты вращения точек на шатуне и поршне. Определение перемещений, скоростей и ускорений частей машины для заданного входного движения является предметом кинематики машин.Такие расчеты могут быть выполнены без учета задействованных сил, поскольку движения ограничены.
Для заданной частоты вращения коленчатого вала поршневого двигателя, например, можно рассчитать соответствующие частоты вращения точек на шатуне и поршне. Определение перемещений, скоростей и ускорений частей машины для заданного входного движения является предметом кинематики машин.Такие расчеты могут быть выполнены без учета задействованных сил, поскольку движения ограничены.
Просмотр и систематизация списка устройств ATP в Microsoft Defender — Безопасность Windows
- Читать 3 минуты
В этой статье
Важно
Улучшенный центр безопасности Microsoft 365 теперь доступен в общедоступной предварительной версии.Этот новый интерфейс включает в себя Защитник для конечной точки, Защитник для Office 365, Защитник Microsoft 365 и другие функции в центре безопасности Microsoft 365. Узнай, что нового. Этот раздел может относиться как к Защитнику Microsoft для конечной точки, так и к Защитнику Microsoft 365. Обратитесь к разделу « применимо к » и поищите в этой статье конкретные выноски, в которых могут быть различия.
Узнай, что нового. Этот раздел может относиться как к Защитнику Microsoft для конечной точки, так и к Защитнику Microsoft 365. Обратитесь к разделу « применимо к » и поищите в этой статье конкретные выноски, в которых могут быть различия.
Применимо к:
Хотите испытать Defender for Endpoint? Подпишитесь на бесплатную пробную версию.
Список устройств показывает список устройств в вашей сети, для которых были созданы предупреждения. По умолчанию в очереди отображаются устройства, просмотренные за последние 30 дней.
С первого взгляда вы увидите такую информацию, как домен, уровень риска, платформа ОС и другие подробности, чтобы упростить идентификацию устройств, подвергающихся наибольшему риску.
Есть несколько вариантов, из которых вы можете настроить вид списка устройств. В верхней части навигации вы можете:
- Добавить или удалить столбцы
- Экспорт всего списка в формате CSV
- Выберите количество элементов, отображаемых на странице
- Применить фильтры
Во время процесса подключения список Устройства постепенно заполняется устройствами по мере того, как они начинают передавать данные датчиков. Используйте это представление, чтобы отслеживать подключенные конечные точки, когда они подключаются к сети, или загрузите полный список конечных точек в виде файла CSV для автономного анализа.
Используйте это представление, чтобы отслеживать подключенные конечные точки, когда они подключаются к сети, или загрузите полный список конечных точек в виде файла CSV для автономного анализа.
Примечание
Если вы экспортируете список устройств, он будет содержать все устройства в вашей организации. Загрузка может занять значительное время, в зависимости от размера вашей организации. При экспорте списка в формат CSV данные отображаются без фильтров. CSV-файл будет включать все устройства в организации, независимо от какой-либо фильтрации, примененной в самом представлении.
Сортировка и фильтрация списка устройств
Вы можете применить следующие фильтры, чтобы ограничить список предупреждений и получить более сфокусированное представление.
Уровень риска
Уровень риска отражает общую оценку риска устройства на основе комбинации факторов, включая типы и серьезность активных предупреждений на устройстве. Разрешение активных предупреждений, утверждение действий по исправлению и подавление последующих предупреждений может снизить уровень риска.
Уровень воздействия
Уровень уязвимости отражает текущую уязвимость устройства на основе совокупного воздействия его ожидающих рекомендаций по безопасности.Возможные уровни: низкий, средний и высокий. Низкое воздействие означает, что ваши устройства менее уязвимы для эксплуатации.
Если в качестве уровня воздействия указано «Нет данных», это может быть по нескольким причинам:
Платформа ОС
Выберите только те платформы ОС, которые вам интересны.
Состояние здоровья
Фильтр по следующим состояниям работоспособности устройства:
Активный — устройства, которые активно передают данные датчиков службе.
Неактивный — устройства, которые полностью перестали отправлять сигналы более 7 дней.
Неправильная конфигурация — Устройства, которые нарушили связь со службой или не могут отправлять данные датчиков. Неверно настроенные устройства можно классифицировать как
.- Нет данных датчика
- Нарушение связи
Для получения дополнительной информации о том, как решать проблемы на неправильно настроенных устройствах, см. «Устранение неисправных датчиков».
Статус антивируса
Фильтрация устройств по статусу антивируса. Применимо только к активным устройствам с Windows 10.
- Отключено — Защита от вирусов и угроз отключена.
- Не сообщает — Защита от вирусов и угроз не сообщает.
- Не обновляется — Защита от вирусов и угроз устарела.
Для получения дополнительной информации см. Просмотр панели управления угрозами и уязвимостями.
Статус смягчения угрозы
Чтобы просмотреть устройства, которые могут быть затронуты определенной угрозой, выберите угрозу из раскрывающегося меню, а затем выберите, какой аспект уязвимости необходимо устранить.
Чтобы узнать больше об определенных угрозах, см. Аналитика угроз. Для получения информации о смягчении см. Управление угрозами и уязвимостями.
Аналитика угроз. Для получения информации о смягчении см. Управление угрозами и уязвимостями.
Windows 10 версии
Выберите только те версии Windows 10, которые вам интересны.
Теги и группы
Отфильтруйте список на основе группировки и тегов, которые вы добавили для отдельных устройств.См. Разделы Создание тегов устройств и управление ими и Создание групп устройств и управление ими.
Создание и управление группами устройств в Microsoft Defender ATP — Windows Security
- Читать 3 минуты
В этой статье
Важно
Улучшенный центр безопасности Microsoft 365 теперь доступен в общедоступной предварительной версии.Этот новый интерфейс включает в себя Защитник для конечной точки, Защитник для Office 365, Защитник Microsoft 365 и другие функции в центре безопасности Microsoft 365. Узнай, что нового. Этот раздел может относиться как к Защитнику Microsoft для конечной точки, так и к Защитнику Microsoft 365. Обратитесь к разделу « применимо к » и поищите в этой статье конкретные выноски, в которых могут быть различия.
Узнай, что нового. Этот раздел может относиться как к Защитнику Microsoft для конечной точки, так и к Защитнику Microsoft 365. Обратитесь к разделу « применимо к » и поищите в этой статье конкретные выноски, в которых могут быть различия.
Применимо к:
Хотите испытать Microsoft Defender для конечных точек? Подпишитесь на бесплатную пробную версию.
В корпоративном сценарии группам операций по обеспечению безопасности обычно назначается набор устройств. Эти устройства сгруппированы вместе на основе набора атрибутов, таких как их домены, имена компьютеров или назначенные теги.
В Защитнике Microsoft для конечных точек вы можете создавать группы устройств и использовать их для:
- Ограничить доступ к связанным предупреждениям и данным для определенных групп пользователей Azure AD с назначенными ролями RBAC
- Настроить различные параметры автоматического исправления для разных наборов устройств
- Назначьте определенные уровни исправления для применения во время автоматизированных расследований
- В ходе расследования отфильтруйте список «Устройства » только до определенных групп устройств с помощью фильтра «Группа ».

Вы можете создавать группы устройств в контексте доступа на основе ролей (RBAC), чтобы контролировать, кто может выполнять определенные действия или просматривать информацию, путем назначения группы (групп) устройств группе пользователей. Дополнительные сведения см. В разделе Управление доступом к порталу с помощью управления доступом на основе ролей.
В процессе создания группы устройств вы:
- Установите уровень автоматического исправления для этой группы. Дополнительные сведения об уровнях исправления см. В разделе Использование автоматического расследования для исследования и устранения угроз.
- Укажите правило сопоставления, которое определяет, какая группа устройств принадлежит к группе, на основе имени устройства, домена, тегов и платформы ОС. Если устройство также соответствует другим группам, оно добавляется только в группу устройств с наивысшим рейтингом.
- Выберите группу пользователей Azure AD, которая должна иметь доступ к группе устройств.
- Ранжируйте группу устройств относительно других групп после ее создания.

Примечание
Группа устройств доступна всем пользователям, если вы не назначили ей какие-либо группы Azure AD.
Создать группу устройств
На панели навигации выберите Настройки > Группы устройств .
Щелкните Добавить группу устройств .
Введите имя группы и настройки автоматизации и укажите правило сопоставления, которое определяет, какие устройства принадлежат к группе. Посмотрите, как начинается автоматическое расследование.
Подсказка
Если вы хотите сгруппировать устройства по организационным единицам, вы можете настроить раздел реестра для принадлежности к группе.Дополнительные сведения о тегах устройств см. В разделе Создание тегов устройств и управление ими.
Предварительный просмотр нескольких устройств, которые будут соответствовать этому правилу.
Если вас устраивает правило, щелкните вкладку Доступ пользователей .Назначьте группы пользователей, которые могут получить доступ к созданной вами группе устройств.
Примечание
Вы можете предоставить доступ только тем группам пользователей Azure AD, которые были назначены ролям RBAC.
Щелкните Закрыть .Изменения конфигурации применяются.
 Если вас устраивает правило, щелкните вкладку Доступ пользователей .
Если вас устраивает правило, щелкните вкладку Доступ пользователей .Управление группами устройств
Вы можете повысить или понизить ранг группы устройств, чтобы ей был присвоен более высокий или более низкий приоритет во время сопоставления. Когда устройство соответствует более чем одной группе, оно добавляется только в группу с наивысшим рейтингом. Вы также можете редактировать и удалять группы.
Предупреждение
Удаление группы устройств может повлиять на правила уведомления по электронной почте. Если группа устройств настроена в соответствии с правилом уведомления по электронной почте, она будет удалена из этого правила.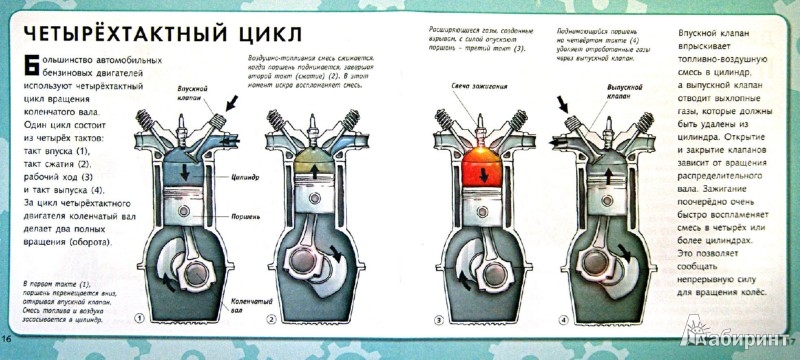 Если группа устройств является единственной группой, настроенной для уведомления по электронной почте, это правило уведомления по электронной почте будет удалено вместе с группой устройств.
Если группа устройств является единственной группой, настроенной для уведомления по электронной почте, это правило уведомления по электронной почте будет удалено вместе с группой устройств.
По умолчанию группы устройств доступны всем пользователям, имеющим доступ к порталу. Вы можете изменить поведение по умолчанию, назначив группы пользователей Azure AD группе устройств.
Устройства, не соответствующие ни одной группе, добавляются в группу «Разгруппированные устройства» (по умолчанию). Вы не можете изменить ранг этой группы или удалить ее. Однако вы можете изменить уровень исправления этой группы и определить группы пользователей Azure AD, которые могут получить доступ к этой группе.
Примечание
Применение изменений к конфигурации группы устройств может занять до нескольких минут.
Frontiers | Полностью имплантируемое беспроводное 128-канальное записывающее устройство ЭКоГ для интерфейсов мозг-машина человека: W-HERBS
Введение
Множественные заболевания и симптоматические состояния приводят к потере мышечного контроля без нарушения когнитивных способностей пациента. К ним относятся боковой амиотрофический склероз (БАС), инсульт ствола головного мозга, повреждение спинного мозга, мышечная дистрофия, болезнь Паркинсона и церебральный паралич.Интерфейс мозг-машина (ИМТ) — это многообещающая с клинической точки зрения технология, которая позволяет управлять машинами при отсутствии физического контакта с устройствами ввода и с прямым использованием сигналов мозга. Таким образом, технология BMI может улучшить независимость и качество жизни пациентов с вышеописанными состояниями, позволяя управлять внешними устройствами для связи с другими и манипулировать их окружением в соответствии с их желанием.
К ним относятся боковой амиотрофический склероз (БАС), инсульт ствола головного мозга, повреждение спинного мозга, мышечная дистрофия, болезнь Паркинсона и церебральный паралич.Интерфейс мозг-машина (ИМТ) — это многообещающая с клинической точки зрения технология, которая позволяет управлять машинами при отсутствии физического контакта с устройствами ввода и с прямым использованием сигналов мозга. Таким образом, технология BMI может улучшить независимость и качество жизни пациентов с вышеописанными состояниями, позволяя управлять внешними устройствами для связи с другими и манипулировать их окружением в соответствии с их желанием.
Запись электрокортикограммы (ЭКоГ) и внутрикортикальная запись — два основных метода, используемых в клинических устройствах для измерения ИМТ.Запись ЭКоГ обычно используется при лечении трудноизлечимой эпилепсии, и недавние исследования продемонстрировали декодирование траекторий рук (Pistohl et al., 2008; Schalk et al., 2008; Nakanishi et al., 2013; Bundy et al. , 2016). ) и движения пальцев (Scherer et al., 2009; Nakanishi et al., 2014) с использованием сигналов ЭКоГ человека. Сигналы ЭКоГ также регистрировались с помощью субдуральных сеточных электродов, размещенных на сенсомоторной коре головного мозга обезьяны. Эти сигналы использовались для стабильного декодирования трехмерных положений рук в течение почти 1 года (Chao et al., 2010), что указывает на то, что сигналы ЭКоГ предоставляют надежную информацию и стабильные измерения.
, 2016). ) и движения пальцев (Scherer et al., 2009; Nakanishi et al., 2014) с использованием сигналов ЭКоГ человека. Сигналы ЭКоГ также регистрировались с помощью субдуральных сеточных электродов, размещенных на сенсомоторной коре головного мозга обезьяны. Эти сигналы использовались для стабильного декодирования трехмерных положений рук в течение почти 1 года (Chao et al., 2010), что указывает на то, что сигналы ЭКоГ предоставляют надежную информацию и стабильные измерения.
Внутрикортикальные записи с игольчатых электродов широко используются в области нейрофизиологии. В частности, решетки внутрикортикальных микроэлектродов (Hochberg et al., 2006, 2012; Velliste et al., 2008; Fraser et al., 2009; Collinger et al., 2013; Hiremath et al., 2015) значительно улучшили способствовали пониманию механизмов мозга, поскольку массивы обеспечивают высокое временное и пространственное разрешение.Эти массивы также использовались в экспериментах с ИМТ на людях и обезьянах (Hochberg et al., 2006, 2012; Velliste et al. , 2008; Fraser et al., 2009; Collinger et al., 2013; Hiremath et al., 2015). ) и использовались для управления манипулятором робота в реальном времени. Однако у этих массивов есть риск постепенного снижения чувствительности электродов из-за хронических воспалительных тканевых реакций. По этой причине использование внутрикортикальных измерений для клинического ИМТ нецелесообразно в Японии и некоторых других странах.Таким образом, в этом исследовании мы сосредоточились на управлении рукой робота в реальном времени, достигаемой с помощью ИМТ на основе ЭКоГ (Yanagisawa et al., 2009, 2011, 2012), и разработке полностью имплантируемого беспроводного записывающего устройства (Hirata et al., 2011).
, 2008; Fraser et al., 2009; Collinger et al., 2013; Hiremath et al., 2015). ) и использовались для управления манипулятором робота в реальном времени. Однако у этих массивов есть риск постепенного снижения чувствительности электродов из-за хронических воспалительных тканевых реакций. По этой причине использование внутрикортикальных измерений для клинического ИМТ нецелесообразно в Японии и некоторых других странах.Таким образом, в этом исследовании мы сосредоточились на управлении рукой робота в реальном времени, достигаемой с помощью ИМТ на основе ЭКоГ (Yanagisawa et al., 2009, 2011, 2012), и разработке полностью имплантируемого беспроводного записывающего устройства (Hirata et al., 2011).
Система BMI, используемая для управления манипулятором робота в реальном времени в этом исследовании, включает коммерческую 128-канальную (ch) систему цифровой электроэнцефалограммы (ЭЭГ), аналитическую рабочую станцию и манипулятор робота. Аналитическая рабочая станция может декодировать простые двигательные задачи, связанные с движениями кисти и руки, из сигналов ЭКоГ человека с использованием быстрого преобразования Фурье (FFT) и машины опорных векторов (SVM) (Kamitani and Tong, 2005). Впоследствии рука робота (Yokoi et al., 2009) выполняла те же движения, что и декодированные, и соответствие между движениями рук человека и робота составляло примерно 70–90%. Однако в этой системе используется проводное записывающее устройство ЭКоГ, и проникновение через кожу связано с риском инфицирования при длительных периодах имплантации. Поэтому в настоящем исследовании мы разработали полностью имплантируемую беспроводную систему записи ЭКоГ.
Впоследствии рука робота (Yokoi et al., 2009) выполняла те же движения, что и декодированные, и соответствие между движениями рук человека и робота составляло примерно 70–90%. Однако в этой системе используется проводное записывающее устройство ЭКоГ, и проникновение через кожу связано с риском инфицирования при длительных периодах имплантации. Поэтому в настоящем исследовании мы разработали полностью имплантируемую беспроводную систему записи ЭКоГ.
Ранее разработанные имплантируемые устройства для ИМТ включают устройство записи внутрикортикального сигнала (Borton et al., 2013; Yin et al., 2013) и эпидуральное устройство записи ЭКоГ WIMAGINE (Charvet et al., 2013; Mestais et al., 2015). Оба этих устройства были протестированы с использованием записей инвазивных сигналов мозга обезьян. Параллельно с этим мы разрабатываем субдуральное устройство для записи ЭКоГ с 2009 года. Наш первый прототип, который был разработан в 2011 году (Hirata et al., 2011), был разработан для оценки системной интеграции записей ЭКоГ и беспроводного источника питания. В настоящем исследовании мы сообщаем об улучшении размера беспроводной передачи данных и беспроводного источника питания, а также скорости передачи данных.
В настоящем исследовании мы сообщаем об улучшении размера беспроводной передачи данных и беспроводного источника питания, а также скорости передачи данных.
Вся система
Конструкция и внешний вид полностью имплантируемой беспроводной 128-канальной системы записи ЭКоГ (беспроводная система ИМТ в реальном времени на основе ЭКоГ человека, W-HERBS) показаны на рисунке 1. Она предназначена для имплантации компонентов как в голову, так и в брюшная полость. Узел (A) и (B) называется головным устройством, а узел (D) — брюшным устройством. Титановый кожух черепа (A) содержит два блока измерения ЭКоГ и работает как искусственная замена кости черепа для открытого костного лоскута черепа.Множественные трехмерные электроды высокой плотности (B) размещаются непосредственно на поверхности мозга и соответствуют контуру поверхности мозга. Растягивающийся спиральный кабель (C) соединяет устройство для головы и брюшной полости. Блок управления данными и питанием в брюшной полости (D) обменивается данными с блоками измерения ЭКоГ и внешними устройствами, такими как точка доступа Wi-Fi (F) и беспроводной источник питания (E). Программное обеспечение для мониторинга ЭКоГ на рабочей станции (G) получает данные ЭКоГ и передает параметры управления для единиц измерения ЭКоГ (E).Беспроводной источник питания передает энергию в форме волны переменного тока (AC). Подробная информация об устройстве описана в следующих разделах.
Программное обеспечение для мониторинга ЭКоГ на рабочей станции (G) получает данные ЭКоГ и передает параметры управления для единиц измерения ЭКоГ (E).Беспроводной источник питания передает энергию в форме волны переменного тока (AC). Подробная информация об устройстве описана в следующих разделах.
РИСУНОК 1. Изображения имплантируемого устройства. (A) Титановая оболочка черепа. (B) Многократные электроды высокой плотности 3D. (C) Эластичный спиральный кабель. (D) Блок управления данными и питанием. (E) Беспроводной блок питания (передатчик). (F) Точка доступа Wi-Fi. (G) Программное обеспечение для мониторинга ЭКоГ. (H) Пример вспомогательного устройства.
3D Множественные электроды высокой плотности
Множественные электроды высокой плотности 3D, использованные в этом исследовании, были разработаны для повышения производительности записи и пространственного разрешения по сравнению с обычными электродами, используемыми для записи сигналов ЭКоГ.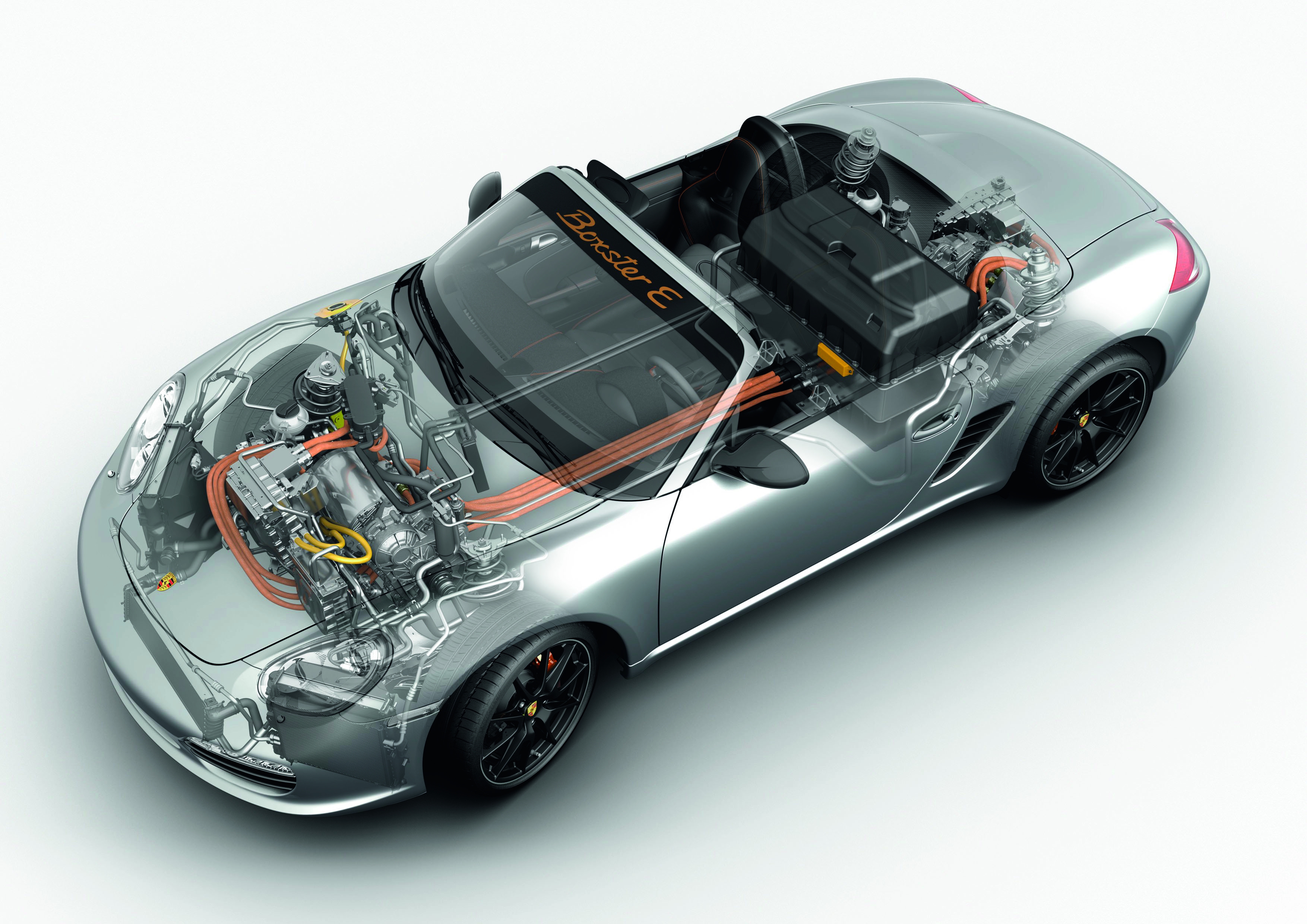 На рис. 2А показаны различия между обычными электродами (а) и предлагаемыми электродами высокой плотности (b и c). Площадь контакта обычных электродов — 3.0 мм в диаметре и расстояние между электродами 10 мм, при этом площадь контакта предлагаемых микроэлектродов высокой плотности имеет диаметр 1,0 мм, а расстояние между электродами может достигать 2,5 мм. Известно, что сигналы ЭКоГ возникают из-за активности коры в области 2–3 мм, окружающей электроды (Slutzky et al., 2010). Соответственно, межэлектродное расстояние предлагаемых электродов обеспечивает достаточную плотность для полного использования потенциала сигналов ЭКоГ.
На рис. 2А показаны различия между обычными электродами (а) и предлагаемыми электродами высокой плотности (b и c). Площадь контакта обычных электродов — 3.0 мм в диаметре и расстояние между электродами 10 мм, при этом площадь контакта предлагаемых микроэлектродов высокой плотности имеет диаметр 1,0 мм, а расстояние между электродами может достигать 2,5 мм. Известно, что сигналы ЭКоГ возникают из-за активности коры в области 2–3 мм, окружающей электроды (Slutzky et al., 2010). Соответственно, межэлектродное расстояние предлагаемых электродов обеспечивает достаточную плотность для полного использования потенциала сигналов ЭКоГ.
РИСУНОК 2. 3D многослойные электродные листы высокой плотности. (A) Три типа (a, b и c) нескольких электродов, размещенных на модели поверхности мозга (три круга , относятся к положениям на мозге). (B) Производственный процесс.
Предлагаемые электроды имеют практически идеальный контакт электродов со складками коры.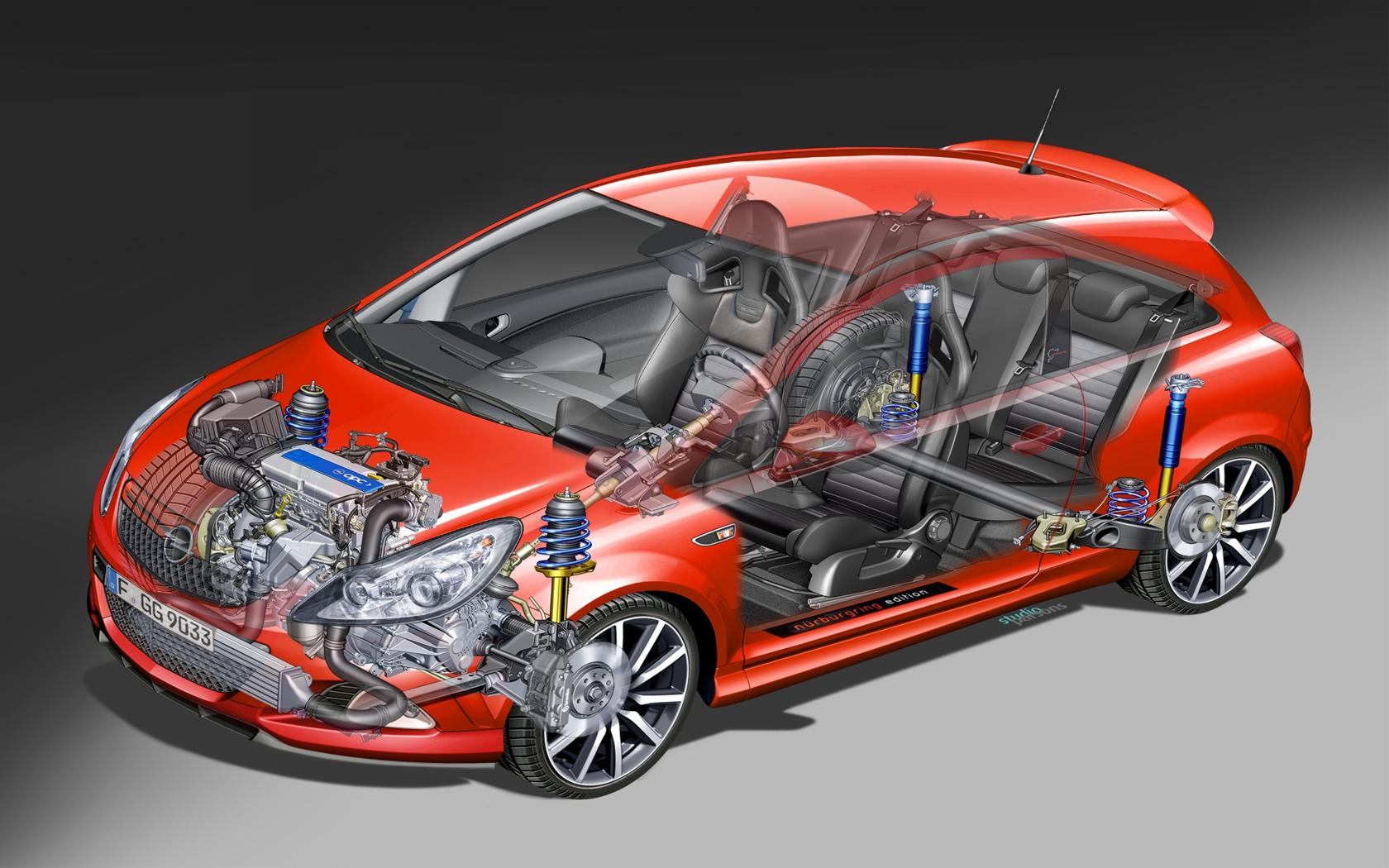 Мы разработали новый быстрый производственный процесс с использованием технологий 3D-печати для придания листам кремниевых электродов трехмерных форм, которые точно соответствуют отдельным кортикальным поверхностям.Подробный производственный процесс описан в нашей предыдущей статье (Morris et al., 2015) и представлен на рисунке 2B. Этот процесс состоит из следующих этапов: (1) получение данных магнитно-резонансной томографии (МРТ) тонких срезов головного мозга (цифровая визуализация и коммуникация в медицине, формат DICOM), (2) построение трехмерных моделей мозга на основе данных МРТ с использованием программное обеспечение Mimics (3-matic v5.1, Materialize Inc., NV; Лёвен, Бельгия), (3) выделение целевых областей коры из модели и создание наборов моделей пресс-форм для прессования силиконовых листов с помощью 3D-проектирования (CAD) программа 3-matic (Mimics v14.12, Materialise Inc., NV), (4) изготовление форм из смолы с использованием 3D-принтера (3D-принтер Polyjet, Objet Geometries Ltd.
Мы разработали новый быстрый производственный процесс с использованием технологий 3D-печати для придания листам кремниевых электродов трехмерных форм, которые точно соответствуют отдельным кортикальным поверхностям.Подробный производственный процесс описан в нашей предыдущей статье (Morris et al., 2015) и представлен на рисунке 2B. Этот процесс состоит из следующих этапов: (1) получение данных магнитно-резонансной томографии (МРТ) тонких срезов головного мозга (цифровая визуализация и коммуникация в медицине, формат DICOM), (2) построение трехмерных моделей мозга на основе данных МРТ с использованием программное обеспечение Mimics (3-matic v5.1, Materialize Inc., NV; Лёвен, Бельгия), (3) выделение целевых областей коры из модели и создание наборов моделей пресс-форм для прессования силиконовых листов с помощью 3D-проектирования (CAD) программа 3-matic (Mimics v14.12, Materialise Inc., NV), (4) изготовление форм из смолы с использованием 3D-принтера (3D-принтер Polyjet, Objet Geometries Ltd. , Израиль), (5) прессование силиконовых листов с помощью форм, (6) размещение электродов в целевых точках на листе и покрыть их другим силиконовым листом, и (7) удаление электродного листа из форм после подтверждения фиксированной адгезии покрывающего силиконового листа. Этот процесс был успешно использован для подгонки нескольких трехмерных электродов к кортикальным поверхностям. Широко доступны конфигурации электродов для эффективной регистрации сигналов ЭКоГ с использованием индивидуально расположенных электродов в программном обеспечении САПР или на форме.Предлагаемые электроды (рис. 2A; b и c) используются по-разному. Тип с высокой плотностью записи (b) подходит для записи активности из областей, в которых необходимо высокое пространственное разрешение, в то время как тип с высокой плотностью (c) охватывает большую площадь.
, Израиль), (5) прессование силиконовых листов с помощью форм, (6) размещение электродов в целевых точках на листе и покрыть их другим силиконовым листом, и (7) удаление электродного листа из форм после подтверждения фиксированной адгезии покрывающего силиконового листа. Этот процесс был успешно использован для подгонки нескольких трехмерных электродов к кортикальным поверхностям. Широко доступны конфигурации электродов для эффективной регистрации сигналов ЭКоГ с использованием индивидуально расположенных электродов в программном обеспечении САПР или на форме.Предлагаемые электроды (рис. 2A; b и c) используются по-разному. Тип с высокой плотностью записи (b) подходит для записи активности из областей, в которых необходимо высокое пространственное разрешение, в то время как тип с высокой плотностью (c) охватывает большую площадь.
Блок измерения ЭКоГ
Мы разработали аналоговый интерфейсный (AFE) чип (Yoshida et al., 2010, 2011) для получения целевых сигналов ЭКоГ. Этот чип усиливает 64-канальные сигналы ЭКоГ, выполняет полосовую фильтрацию и преобразует аналоговые сигналы напряжения в 12-битные цифровые данные с максимальной частотой дискретизации 1 кГц. Технические характеристики этого чипа 5,18 × 5,18 мм приведены в таблице 1.
Технические характеристики этого чипа 5,18 × 5,18 мм приведены в таблице 1.
ТАБЛИЦА 1. Характеристики микросхемы .
Как показано на рисунке 3, две микросхемы AFE размещены на двух печатных платах (14,0 мм × 19,4 мм × 2,5 мм) и соединены с помощью гибких печатных схем, составляющих 128-канальный блок (блок измерения ЭКоГ). Каждая плата имеет 73 контактных площадки для измерения ЭКоГ и восемь контактных площадок для контроля микросхемы. 73 площадки электрода включают 64 площадки для сигналов ЭКоГ, восемь площадок для опорных сигналов (каждая площадка связана с восемью площадками сигнала ЭКоГ) и одну площадку для заземления.
РИСУНОК 3. Внешний вид единиц измерения ЭКоГ: две единицы по 128 кан. Красный квадрат обозначает одну микросхему на 64 канала.
В представленном прототипе 128-канальные электроды были подключены к контактным площадкам отдельно, общий электрод сравнения был подключен ко всем 16 контактным площадкам, и был установлен заземляющий электрод. Восемь контрольных сигнальных площадок были подключены к блоку управления данными и питанием с помощью растягиваемых спиральных кабелей. Восемь управляющих сигналов передавались с использованием двух линий для питания (VCC и GND), четырех линий для управляющего входа (CLK, RST, SDI и WTE) и двух линий для вывода данных (TRO и SDO).В целом, для ретрансляции 128-канальных сигналов ЭКоГ требовалось 10 линий, поскольку два блока измерения ЭКоГ совместно использовали две линии питания с четырьмя входными линиями управления, но не с двумя линиями вывода данных.
Восемь контрольных сигнальных площадок были подключены к блоку управления данными и питанием с помощью растягиваемых спиральных кабелей. Восемь управляющих сигналов передавались с использованием двух линий для питания (VCC и GND), четырех линий для управляющего входа (CLK, RST, SDI и WTE) и двух линий для вывода данных (TRO и SDO).В целом, для ретрансляции 128-канальных сигналов ЭКоГ требовалось 10 линий, поскольку два блока измерения ЭКоГ совместно использовали две линии питания с четырьмя входными линиями управления, но не с двумя линиями вывода данных.
Титановый кожух для черепа
Титановый кожух черепа был разработан для герметичной защиты блоков измерения ЭКоГ от шума окружающей среды, герметизации тканевых жидкостей и защиты от внешнего воздействия. Он также был разработан в качестве искусственной кости черепа для замены костных лоскутов черепа, удаленных во время краниотомии.
Производственный процесс (рис. 4) состоял из следующих этапов: (1) получение тонкого среза кости черепа с компьютерной томографией (КТ), (2) построение трехмерной модели черепа с использованием данных компьютерной томографии (формат DICOM) и программного обеспечения 3D CAD. (Мимика), (3) выделение области трепанации черепа из модели, проектирование модели корпуса и расположение пространства, используемого для размещения блока измерения ЭКоГ, с использованием программного обеспечения 3D CAD (3-matic), (4) планирование процессов обработки на основе данных 3D CAD с использованием CAD и программного обеспечения для автоматизированного производства GibbsCAM ® (Gibbs and Associates, Калифорния, США), (5) вырезание модели обсадной колонны из титанового блока с помощью 5-осевого обрабатывающего центра, (6 ) лазерная сварка титановых деталей с отверстиями для крепления корпуса к месту трепанации черепа; (7) лазерная сварка титановой пластины для герметизации после размещения блоков измерения ЭКоГ в пространстве макета; (8) пломбирование пространство эпоксидной смолой.
(Мимика), (3) выделение области трепанации черепа из модели, проектирование модели корпуса и расположение пространства, используемого для размещения блока измерения ЭКоГ, с использованием программного обеспечения 3D CAD (3-matic), (4) планирование процессов обработки на основе данных 3D CAD с использованием CAD и программного обеспечения для автоматизированного производства GibbsCAM ® (Gibbs and Associates, Калифорния, США), (5) вырезание модели обсадной колонны из титанового блока с помощью 5-осевого обрабатывающего центра, (6 ) лазерная сварка титановых деталей с отверстиями для крепления корпуса к месту трепанации черепа; (7) лазерная сварка титановой пластины для герметизации после размещения блоков измерения ЭКоГ в пространстве макета; (8) пломбирование пространство эпоксидной смолой.
РИСУНОК 4. Процесс изготовления титановой оболочки черепа. (A) Построение 3D-модели на основе компьютерной томографии. (B) Кожух черепа разработан путем редактирования 3D-модели. (C) Операция по механической обработке и лазерной сварке оболочки черепа. (D) Пример имплантации.
(C) Операция по механической обработке и лазерной сварке оболочки черепа. (D) Пример имплантации.
Гибкий и растягивающийся спиральный кабель
Гибкий растягиваемый спиральный кабель соединяет блок измерения ЭКоГ в оболочке черепа с блоком управления данными и питанием в брюшной оболочке и проходит подкожно от оболочки черепа к брюшной оболочке.Спиральный кабель разработан на основе кабеля глубокого стимулятора мозга (DBS): он состоит из 10 сверхтонких коаксиальных кабелей (AWG42), которые спирально закреплены внутри трубки из уретановой смолы (ϕ2 мм × 900 мм).
Устройство для брюшной полости
Абдоминальное устройство состоит из блока управления данными и питанием, литий-ионно-полимерной перезаряжаемой батареи, ферритового листа, двух катушек на 16 витков и уплотнения из эпоксидной смолы. Блок управления данными и питанием является основным компонентом этого устройства и содержит программируемую микросхему вентильной матрицы Microsemi A2F200M3F-CS288, микросхему Wi-Fi Redpine Signals RS9110-N-11-24 и оригинальную схему приемника беспроводного источника питания. (Рисунок 5A).Чип Wi-Fi был добавлен из-за перспективных медицинских протоколов беспроводной связи. Блок передает параметры управления, включая усиление, информацию о фильтрации и частоты записи, из программного обеспечения в блоки измерения ЭКоГ, а данные (12 бит / канал × 128 каналов × 1 кГц) из блоков измерения ЭКоГ — в программное обеспечение. Устройство питается (200 мВт) от аккумулятора без беспроводного источника питания. Во время беспроводной зарядки от источника питания весь блок и аккумулятор потребляют 400 мВт. Корпус изготовлен из эпоксидной смолы, чтобы изолировать электрические части от биологических органов.Он обеспечивает биосовместимость для испытаний на животных, но не для имплантации человеку. Мы планируем использовать коммерческую герметичную технологию для следующего прототипа. Абдоминальное устройство показано на рисунке 5B.
(Рисунок 5A).Чип Wi-Fi был добавлен из-за перспективных медицинских протоколов беспроводной связи. Блок передает параметры управления, включая усиление, информацию о фильтрации и частоты записи, из программного обеспечения в блоки измерения ЭКоГ, а данные (12 бит / канал × 128 каналов × 1 кГц) из блоков измерения ЭКоГ — в программное обеспечение. Устройство питается (200 мВт) от аккумулятора без беспроводного источника питания. Во время беспроводной зарядки от источника питания весь блок и аккумулятор потребляют 400 мВт. Корпус изготовлен из эпоксидной смолы, чтобы изолировать электрические части от биологических органов.Он обеспечивает биосовместимость для испытаний на животных, но не для имплантации человеку. Мы планируем использовать коммерческую герметичную технологию для следующего прототипа. Абдоминальное устройство показано на рисунке 5B.
РИСУНОК 5. Абдоминальное устройство, включая блок управления данными и питанием, литий-ионный полимерный аккумулятор, ферритовый лист, катушки и эпоксидное уплотнение. (A) Схема архитектуры. (B) Внешний вид.
(A) Схема архитектуры. (B) Внешний вид.
Беспроводной блок питания
Беспроводной источник питания состоит из набора приемных устройств в брюшной полости и передатчика вне тела (Рисунок 6).Каждый блок состоит из схемы, ферритового листа и катушек. Схема передатчика генерирует магнитное излучение в форме волны переменного тока, а схема приемника преобразует полученное магнитное излучение в постоянный ток. Листы феррита защищают схемы от проходящего магнитного излучения. В качестве материала катушек используются медные многожильные провода, а метод магнитно-резонансной связи используется для повышения эффективности передачи энергии между катушками. Магнитная частота установлена на 265 кГц для обеспечения безопасности.Поскольку площадь катушки блока передатчика (100 мм × 100 мм) больше, чем у блока приемника (40 мм × 40 мм), он предлагает широкую зону передачи энергии, чтобы обеспечить невидимость и приблизительную оценку положения имплантированный ресивер. Наконец, 400 мВт от блока передатчика (24 В) до блока приемника (5 В) на расстоянии 5–25 мм достаточно для питания всего устройства (200 мВт) и зарядки аккумулятора (200 мВт).
Наконец, 400 мВт от блока передатчика (24 В) до блока приемника (5 В) на расстоянии 5–25 мм достаточно для питания всего устройства (200 мВт) и зарядки аккумулятора (200 мВт).
РИСУНОК 6. Технические характеристики беспроводного источника питания. (A) Внешний вид. (B) Схема архитектуры.
Программное обеспечение для мониторинга данных графического и символьного пользовательского интерфейса
Мы использовали пакеты программного обеспечения для мониторинга данных, включая программу в стиле графического пользовательского интерфейса (GUI) для мониторинга данных в реальном времени в течение определенных периодов, а также работающую программу анализа БПФ и управления двигателем для ИМТ. Программы в стиле символьного пользовательского интерфейса (CUI) для длительной записи также подходят для нейробиологических исследований, таких как ночные записи ЭКоГ.
Программное обеспечение с графическим интерфейсом пользователя, взаимодействующее с имплантируемым устройством, позволяет регулировать параметры управления передачей, такие как усиление, настройки полосового фильтра и усиление. Это программное обеспечение принимает 128-канальные сигналы и отображает сигналы и данные БПФ из трех выбранных каналов.
Это программное обеспечение принимает 128-канальные сигналы и отображает сигналы и данные БПФ из трех выбранных каналов.
Программное обеспечение CUI было разработано для записи данных без потери данных и имеет только три функции, а именно: постоянное ожидание данных от имплантируемых устройств, максимально быстрое сохранение полученных данных в двоичные файлы и передача полученных данных на другие компьютеры. используя последовательную связь как можно быстрее.Последующая прямая передача позволяет другим функциям, таким как управление двигателем, выполнять другие рабочие станции и компьютеры с микрочипом. Во время исследования производительности мы записывали данные в течение 24 часов с помощью программного обеспечения CUI. Записанные файлы содержали все временные метки и объемы данных, а также непрерывность отраженного напряжения. Потери данных не было.
Исследование производительности
Производительность устройства W-HERBS в следующих пяти областях была оценена с использованием технических методов: возможность имплантации в 3D-модели человека (см. Эксперимент 1: возможность имплантации человеку), рабочая температура и время (см. Эксперимент 2: работа с W-HERBS. Характеристики), уровни шума и производительность записи по сравнению с обычным измерительным устройством (см. Эксперимент 3: уровни шума и производительность записи), частотный анализ (эксперимент 4: определение частотных компонентов для ИМТ ЭКоГ) и запись в реальном времени (см. Эксперимент 5 : Производительность в реальном времени).
Эксперимент 1: возможность имплантации человеку), рабочая температура и время (см. Эксперимент 2: работа с W-HERBS. Характеристики), уровни шума и производительность записи по сравнению с обычным измерительным устройством (см. Эксперимент 3: уровни шума и производительность записи), частотный анализ (эксперимент 4: определение частотных компонентов для ИМТ ЭКоГ) и запись в реальном времени (см. Эксперимент 5 : Производительность в реальном времени).
Эксперимент 1: Возможность имплантации человеку
Настоящий прототип W-HERBS предназначен для будущей имплантации человеку. Поэтому мы оценили возможность подгонки оригинальных изготовленных компонентов к человеческому телу с точки зрения материала, размера и формы. Компоненты, находящиеся в непосредственном контакте с тканью, включают в себя несколько 3D-электродов высокой плотности и титановый кожух черепа, растягиваемый кабель и кожух брюшного устройства. Все компоненты были произведены с использованием материалов с подтвержденной медицинскими данными биосовместимостью.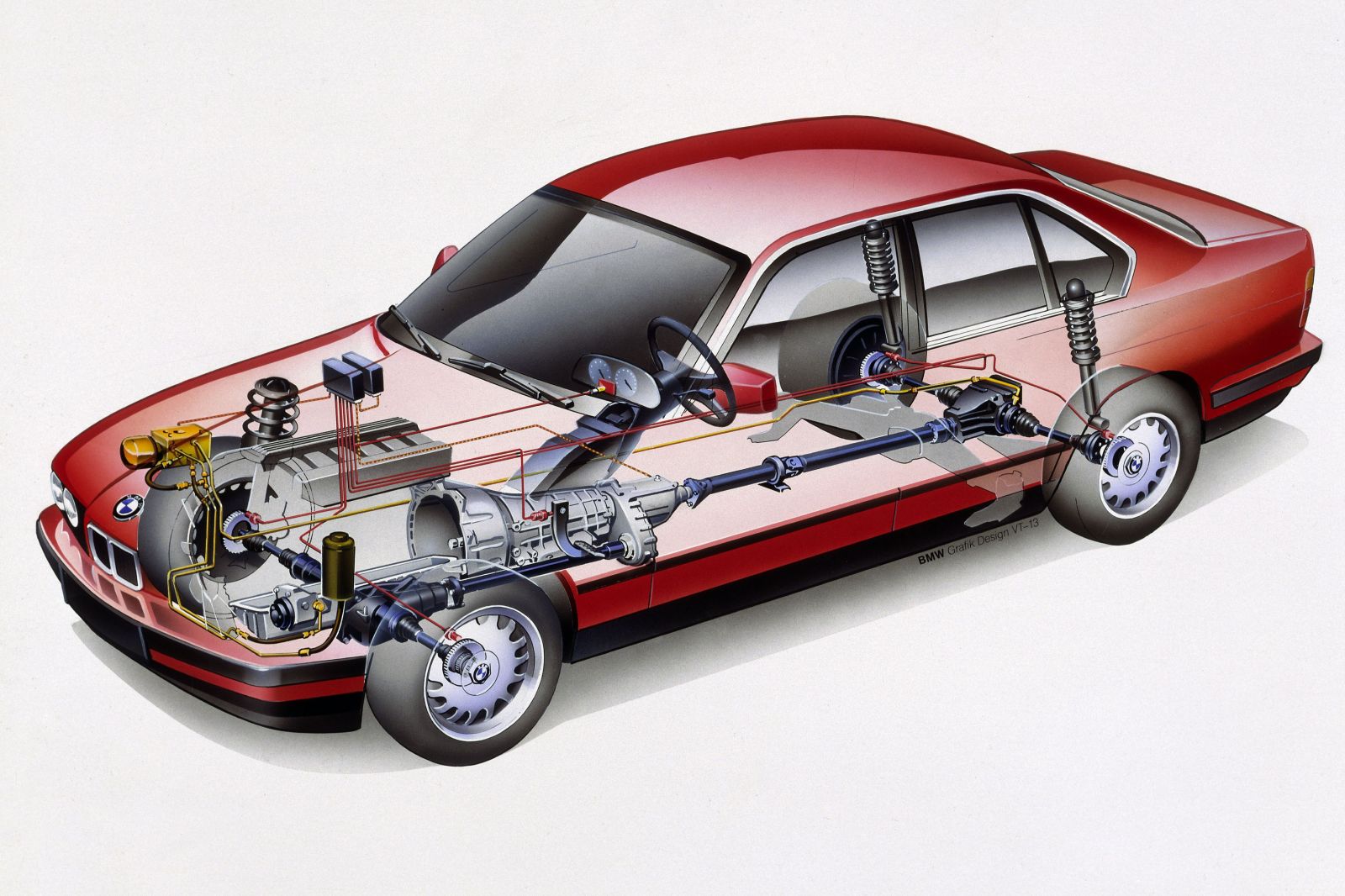
Электроды и кожухи черепа были специально изготовлены в соответствии с индивидуальными данными КТ и МРТ. По этой причине мы также разработали трехмерные модели мозга и черепа для имитации имплантации с использованием одних и тех же индивидуальных данных КТ и МРТ. Затем мы поместили в модели предложенные электроды и кожух черепа. В конце концов, вышеуказанные компоненты были помещены в целевую область с точностью, приемлемой для нейрохирургов. В частности, электроды совпадали с корой-мишенью и легко фиксировались в определенном положении.Для установки у пациентов с тонкими костями черепа кожух плавно выступал наружу на несколько миллиметров из исходной кости черепа, чтобы получить необходимое пространство для размещения единиц измерения ЭКоГ.
Абдоминальное устройство было разработано на основе широко используемого баклофенового насоса, который представляет собой брюшной имплант с резервуаром для интратекальных инфузий баклофена. Имплант имеет ширину 75 мм, толщину 20 мм и вес 165 г. Используемый здесь абдоминальный аппарат имел диаметр 55 мм и толщину 22 мм.Это говорит о том, что наше устройство можно использовать как брюшной имплант. Растягиваемый кабель был разработан на основе кабеля DBS, как описано в Разделе « Гибкий и растягиваемый спиральный кабель».
Используемый здесь абдоминальный аппарат имел диаметр 55 мм и толщину 22 мм.Это говорит о том, что наше устройство можно использовать как брюшной имплант. Растягиваемый кабель был разработан на основе кабеля DBS, как описано в Разделе « Гибкий и растягиваемый спиральный кабель».
Эксперимент 2: Рабочие характеристики W-HERBS
Изначально мы подтвердили, что максимальные рабочие температуры устройств не вызывают теплового повреждения тканей. Известно, что температуры 38 ° C достаточно для начала низкотемпературного ожога.Из компонентов W-HERBS брюшной аппарат потребляет большую часть энергии и выделяет больше всего тепла. Внешний вид всего брюшного устройства во время работы в неподвижном воздухе фотографировали с помощью термографического устройства (FLIR I7, FLIR Systems Inc., США). Поверхностная температура устройства не превышала 38 ° C, что указывает на то, что W-HERBS не повреждают ткани.
Максимальное время работы от аккумулятора было рассчитано на основе потребления энергии системой и электрической емкости аккумулятора.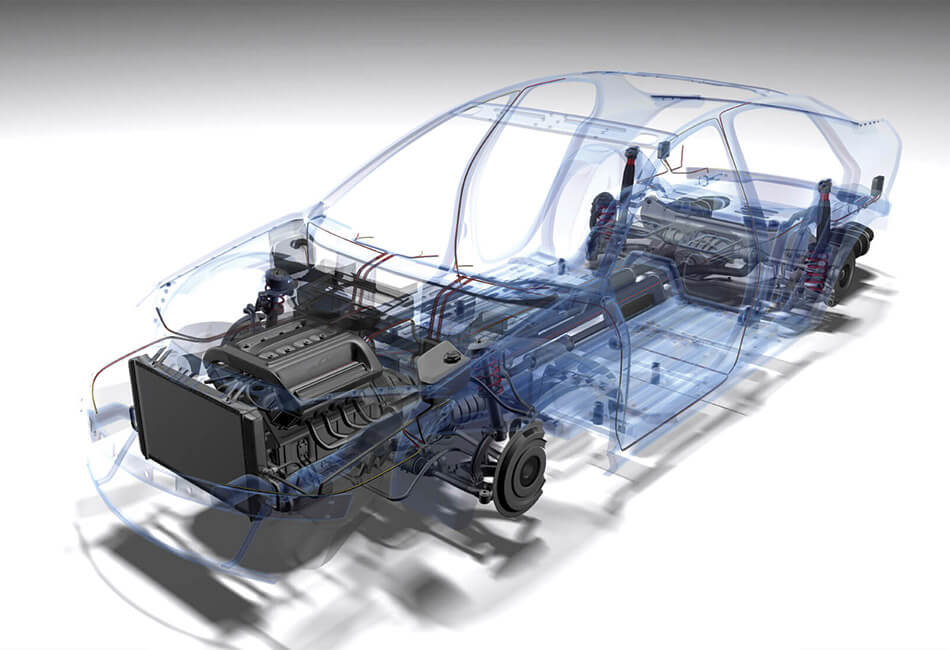 W-HERBS потребляет примерно 200 мВтч, а аккумулятор имеет емкость 1,6 Втч. В результате максимальное время работы составляет примерно 8 часов. В последующих тестах производительности мы зафиксировали скачки напряжения батареи во время и после беспроводной зарядки. В этих экспериментах использовалась самая медленная зарядка, чтобы облегчить тщательное наблюдение, и W-HERBS получал беспроводное питание в течение 8,5 часов. W-HERBS проработал 6 часов, продемонстрировав надлежащую производительность беспроводного источника питания и аккумулятора.
W-HERBS потребляет примерно 200 мВтч, а аккумулятор имеет емкость 1,6 Втч. В результате максимальное время работы составляет примерно 8 часов. В последующих тестах производительности мы зафиксировали скачки напряжения батареи во время и после беспроводной зарядки. В этих экспериментах использовалась самая медленная зарядка, чтобы облегчить тщательное наблюдение, и W-HERBS получал беспроводное питание в течение 8,5 часов. W-HERBS проработал 6 часов, продемонстрировав надлежащую производительность беспроводного источника питания и аккумулятора.
Эксперимент 3: Уровни шума и качество записи
Мы сравнили качество сигнала между W-HERBS и коммерческой системой ЭЭГ (NeuroFax, Nihon Koden; Токио, Япония), используя общие инженерные методы, чтобы подтвердить, что W-HERBS может в достаточной степени получать измерения ЭКоГ. Синусоидальная волна (частота 1 Гц; амплитуда 48 мкВ) вводилась в один канал для обоих устройств через электродные провода длиной 100 мм с помощью функционального генератора в офисной среде без электрического экрана. Затем мы проанализировали измеренные сигналы (рисунок 7). Предложенная синусоида считалась минимальной полосой частот для измерений мозговых волн (т. Е. Дельта-волна имеет полосу пропускания 1–4 Гц) и позволила нам оценить приведенный к входу шум в полосе пропускания более 1 Гц при измерении сигнала.
Затем мы проанализировали измеренные сигналы (рисунок 7). Предложенная синусоида считалась минимальной полосой частот для измерений мозговых волн (т. Е. Дельта-волна имеет полосу пропускания 1–4 Гц) и позволила нам оценить приведенный к входу шум в полосе пропускания более 1 Гц при измерении сигнала.
РИСУНОК 7. Сравнение характеристик синусоидальных измерений. (A) Сигнал, измеренный с помощью W-HERBS. (B) Сигнал, измеренный с помощью NeuroFax. (C) Стандартные отклонения зазора между измеренными сигналами и теоретическими синусоидальными волнами. (C) Частотный анализ стандартных отклонений зазора.
На рисунках 7A, B показаны измеренные и теоретические синусоидальные волны (один цикл измеренной синусоидальной волны был вырезан и перемещен в то же положение, что и теоретическая синусоида). Оба рисунка показывают, что измеренные сигналы почти совпадают с теоретическими синусоидальными волнами со стандартными отклонениями зазора (рисунок 7C) ± 3. 18 мкВ и ± 2,18 мкВ для W-HERBS и NeuroFax соответственно. Последующий анализ пропусков методом БПФ (рис. 7D) показал, что W-HERBS имеет большие пропуски во всех диапазонах, чем NeuroFax, что указывает на более низкие уровни шума. Однако уровень шума был менее ± 1 мкВ, что указывает на то, что W-HERBS можно использовать в качестве альтернативы NeuroFax в экспериментах по ЭКоГ ИМТ. У W-HERBS также были заметные пробелы в полосе пропускания 3 Гц. Эти промежутки отражали периодические шумы от блоков управления данными и энергопотреблением во время передачи массовых данных с интервалами 300 мс.Однако это не проблема, потому что полоса пропускания 3 Гц используется для анализа дельта-волн, которые имеют гораздо более высокие амплитуды, чем 2 мкВ. Кроме того, эти волны выходят за пределы целевого диапазона для ИМТ ЭКоГ. Мы наблюдали шум в полосе частот 50 Гц с помощью NeuroFax, который исходил от коммерческого источника питания для дома.
18 мкВ и ± 2,18 мкВ для W-HERBS и NeuroFax соответственно. Последующий анализ пропусков методом БПФ (рис. 7D) показал, что W-HERBS имеет большие пропуски во всех диапазонах, чем NeuroFax, что указывает на более низкие уровни шума. Однако уровень шума был менее ± 1 мкВ, что указывает на то, что W-HERBS можно использовать в качестве альтернативы NeuroFax в экспериментах по ЭКоГ ИМТ. У W-HERBS также были заметные пробелы в полосе пропускания 3 Гц. Эти промежутки отражали периодические шумы от блоков управления данными и энергопотреблением во время передачи массовых данных с интервалами 300 мс.Однако это не проблема, потому что полоса пропускания 3 Гц используется для анализа дельта-волн, которые имеют гораздо более высокие амплитуды, чем 2 мкВ. Кроме того, эти волны выходят за пределы целевого диапазона для ИМТ ЭКоГ. Мы наблюдали шум в полосе частот 50 Гц с помощью NeuroFax, который исходил от коммерческого источника питания для дома.
Эксперимент 4: Определение частотных компонентов для ИМТ ЭКоГ
Мы исследовали обнаружение частотных компонентов, которые определяют классификационные характеристики SVM. Предыдущие исследования (Yanagisawa et al., 2009, 2011, 2012; Hirata et al., 2011) на проводных устройствах ECoG BMI показывают, что сигналы ECoG при 5 В с полосой пропускания 60–200 Гц и сигналы при 50 мкВ с полосой пропускания 1–2 10 Гц отчетливо представляют намерения человека при движении. Таким образом, в настоящем исследовании характеристик W-HERBS мы использовали синусоидальные сигналы с амплитудой 48 мкВ и длительностью 3 с с повторяющимися колебаниями от 1 до 10 Гц с интервалами в 1 Гц. Мы также использовали синусоидальные волны 4,8 мкВ с амплитудой в течение 3 с с колебаниями от 40 до 200 Гц.Впоследствии эти синусоидальные волны регистрировались с интервалами 700 мс и анализировались на спектрограммах с использованием библиотеки Fastest Fourier Transform с открытым исходным кодом в мировой библиотеке, которая обычно используется для таких анализов. В обоих условиях (рисунки 8A, B) на каждом этапе наблюдался единственный пик на целевой частоте. Поскольку окно БПФ отображало две частоты во время переключения частоты, мы иногда наблюдали более широкие распределения.
Предыдущие исследования (Yanagisawa et al., 2009, 2011, 2012; Hirata et al., 2011) на проводных устройствах ECoG BMI показывают, что сигналы ECoG при 5 В с полосой пропускания 60–200 Гц и сигналы при 50 мкВ с полосой пропускания 1–2 10 Гц отчетливо представляют намерения человека при движении. Таким образом, в настоящем исследовании характеристик W-HERBS мы использовали синусоидальные сигналы с амплитудой 48 мкВ и длительностью 3 с с повторяющимися колебаниями от 1 до 10 Гц с интервалами в 1 Гц. Мы также использовали синусоидальные волны 4,8 мкВ с амплитудой в течение 3 с с колебаниями от 40 до 200 Гц.Впоследствии эти синусоидальные волны регистрировались с интервалами 700 мс и анализировались на спектрограммах с использованием библиотеки Fastest Fourier Transform с открытым исходным кодом в мировой библиотеке, которая обычно используется для таких анализов. В обоих условиях (рисунки 8A, B) на каждом этапе наблюдался единственный пик на целевой частоте. Поскольку окно БПФ отображало две частоты во время переключения частоты, мы иногда наблюдали более широкие распределения. Однако пики четко сформировали ступеньки, что указывает на четкие измерения при амплитуде 48 мкВ в полосе частот 1–10 Гц и на 4.Амплитуда 8 мкВ в полосе частот 60–200 Гц. Следовательно, эффективность W-HERBS была достаточной для ИМТ ЭКоГ.
Однако пики четко сформировали ступеньки, что указывает на четкие измерения при амплитуде 48 мкВ в полосе частот 1–10 Гц и на 4.Амплитуда 8 мкВ в полосе частот 60–200 Гц. Следовательно, эффективность W-HERBS была достаточной для ИМТ ЭКоГ.
РИСУНОК 8. Исследование показателей ИМТ ECoG. (A) Частота синусоидальной волны (48 мкВ) изменяется от 1 до 10 Гц с интервалом в 1 Гц в 3 с. (B) Частоты синусоидальной волны (4,8 мкВ) изменяются между 40 и 200 Гц с интервалами 10 Гц в 3 с.
Эксперимент 5: Производительность в реальном времени
Мы оценили производительность W-HERBS в реальном времени, измерив время от ввода сигнала до конца частотного анализа.W-HERBS передает данные каждые 7 мс, а рабочая станция последовательно получает данные и обрабатывает частотный анализ после накопления определенного количества сохраненных данных. В частности, для анализа требуется примерно 3 с сохраненных данных для обнаружения сигналов с частотой 1 Гц и около 70 мс сохраненных данных для обнаружения сигналов с частотой 40 Гц. Поэтому мы устанавливаем самые быстрые циклы сохраняемых данных на 70 мс, чтобы измерить время между вводом сигнала и окончанием частотного анализа. Среднее, максимальное и минимальное время были рассчитаны на основе 20 точек данных для каждой настройки временного цикла.В конце концов, разница во времени между условиями была небольшая, поскольку для частотного анализа постоянно требовалось 2–3 мс, а для доступа к буферу протокола дейтаграмм пользователя в операционной системе Windows требуется от 160 до 350 мс. Короче говоря, средняя задержка составила 250 мс. Для измерений ИМТ ЭКоГ задержка в 250 мс считается относительно быстрой реакцией и рассматривается как реакция в реальном времени, особенно если намерение человека движется в сигналах ЭКоГ соответственно за 200 мс до начала фактического движения тела.
Поэтому мы устанавливаем самые быстрые циклы сохраняемых данных на 70 мс, чтобы измерить время между вводом сигнала и окончанием частотного анализа. Среднее, максимальное и минимальное время были рассчитаны на основе 20 точек данных для каждой настройки временного цикла.В конце концов, разница во времени между условиями была небольшая, поскольку для частотного анализа постоянно требовалось 2–3 мс, а для доступа к буферу протокола дейтаграмм пользователя в операционной системе Windows требуется от 160 до 350 мс. Короче говоря, средняя задержка составила 250 мс. Для измерений ИМТ ЭКоГ задержка в 250 мс считается относительно быстрой реакцией и рассматривается как реакция в реальном времени, особенно если намерение человека движется в сигналах ЭКоГ соответственно за 200 мс до начала фактического движения тела.
Обсуждение
История развития W-HERBS
Первый прототип W-HERBS был разработан в 2011 году (Hirata et al., 2011) как оригинальный блок измерения ЭКоГ с целью создания интегрированной системы блоков измерения ЭКоГ с беспроводной передачей данных и источником питания. Мы осуществляли беспроводную передачу данных с помощью Bluetooth, который в то время был наиболее практичным протоколом для небольших устройств. Мы продемонстрировали передачу 16-канальных данных ЭКоГ с частотой дискретизации 500 Гц.Однако используемый беспроводной чип имел относительно высокую потребность в энергии 4 Втч для беспроводного источника питания, а брюшное устройство было в два раза больше, чем обычное медицинское устройство. Мы разработали интегрированную систему и продемонстрировали целевую производительность.
Мы осуществляли беспроводную передачу данных с помощью Bluetooth, который в то время был наиболее практичным протоколом для небольших устройств. Мы продемонстрировали передачу 16-канальных данных ЭКоГ с частотой дискретизации 500 Гц.Однако используемый беспроводной чип имел относительно высокую потребность в энергии 4 Втч для беспроводного источника питания, а брюшное устройство было в два раза больше, чем обычное медицинское устройство. Мы разработали интегрированную систему и продемонстрировали целевую производительность.
Мы достигли полной передачи данных с помощью второго прототипа и смогли уменьшить размер беспроводного источника питания, используя маломощный чип Wi-Fi, способный передавать 128-канальные данные ЭКоГ с достаточной частотой дискретизации 1 кГц. Маломощный чип Wi-Fi также способствовал снижению общего энергопотребления до 400 мВт.Кроме того, диаметр брюшного аппарата уменьшен с 80 до 40 мм. Наконец, мы подтвердили, что 128-канальные сигналы ЭКоГ были записаны с частотой дискретизации 1 кГц.
Обычные имплантируемые устройства для BMI
На сегодняшний день опубликованы три предыдущих исследования полностью имплантируемых устройств для ИМТ, предназначенных для будущего клинического применения. В их число входит настоящий отчет об устройстве W-HERBS, посвященный имплантируемому беспроводному нейронному интерфейсу, разработанному в Университете Брауна (Borton et al., 2013), а также о системе WIMAGINE, разработанной в CEA-LETI-CLINATEC (Mestais et al., 2015; Таблица 2).
ТАБЛИЦА 2. Сравнение имплантируемых устройств для ИМТ.
Мы получили полные измерения 128-канальных субдуральных сигналов ЭКоГ на частоте 1 кГц в течение 6 часов с использованием W-HERBS. Беспроводного блока питания хватало для зарядки на расстоянии 5–25 мм. Устройство, разработанное в Университете Брауна, использовалось для беспроводного измерения внутрикортикальных сигналов от 100-канального массива внутрикортикальных микроигл-электродов в течение 6 часов и было способно передавать питание по беспроводной сети на расстояние 5 мм.![]() Напротив, WIMAGINE был разработан для измерения эпидуральных сигналов ЭКоГ. Это устройство можно использовать для измерения сигналов от до 64 каналов, и было показано, что оно может измерять 32-канальные сигналы по беспроводной связи с частотой дискретизации 1 кГц в течение 6 часов с беспроводным источником питания на расстоянии 20 мм.
Напротив, WIMAGINE был разработан для измерения эпидуральных сигналов ЭКоГ. Это устройство можно использовать для измерения сигналов от до 64 каналов, и было показано, что оно может измерять 32-канальные сигналы по беспроводной связи с частотой дискретизации 1 кГц в течение 6 часов с беспроводным источником питания на расстоянии 20 мм.
Сравнение: Политика проектирования
Основные различия между современными устройствами BMI проистекают из сигнала цели. Хотя устройство от Университета Брауна разработано для измерения внутрикортикальных сигналов и имеет самую высокую частоту дискретизации и наименьшее усиление, устройства W-HERBS и WIMAGINE предназначены для измерения сигналов ЭКоГ и, следовательно, имеют одинаковую частоту дискретизации и коэффициент усиления.Однако электроды W-HERBS расположены субдурально и измеряют субдуральные сигналы ЭКоГ, в то время как электроды системы WIMAGINE имеют эпидуральное размещение и измеряют эпидуральные сигналы ЭКоГ.
Сравнение: стабильность и безопасность измерений
Данные, полученные здесь с использованием W-HERBS, показывают, что его применимость для имплантации человеку и характеристики сбора сигнала могут быть лучше, чем у других систем ECoG BMI. Более того, W-HERBS использует субдуральное размещение электродов, аналогичное тому, которое используется в обычных медицинских устройствах, используемых для выявления эпилептических очагов у пациентов с трудноизлечимой эпилепсией.Поскольку субдуральное пространство защищено гематоэнцефалическим барьером, электроды практически не подвержены хроническому воспалению и обеспечивают стабильные долгосрочные измерения. Напротив, в устройстве, разработанном в Университете Брауна, используется матрица внутрикортикальных микроигольных электродов (100 каналов), которые вставляются в кору головного мозга и обеспечивают высочайшее качество сигнала. Тем не менее, инвазивность устройства имеет тенденцию вызывать хроническое воспаление тканей и приводит к постепенному ухудшению качества сигнала (Polikov et al., 2005; Уинслоу и Треско, 2010; Hochberg et al., 2012). Следовательно, в настоящее время внутрикортикальные измерения нельзя использовать для клинических приборов ИМТ в Японии и некоторых других странах.
Более того, W-HERBS использует субдуральное размещение электродов, аналогичное тому, которое используется в обычных медицинских устройствах, используемых для выявления эпилептических очагов у пациентов с трудноизлечимой эпилепсией.Поскольку субдуральное пространство защищено гематоэнцефалическим барьером, электроды практически не подвержены хроническому воспалению и обеспечивают стабильные долгосрочные измерения. Напротив, в устройстве, разработанном в Университете Брауна, используется матрица внутрикортикальных микроигольных электродов (100 каналов), которые вставляются в кору головного мозга и обеспечивают высочайшее качество сигнала. Тем не менее, инвазивность устройства имеет тенденцию вызывать хроническое воспаление тканей и приводит к постепенному ухудшению качества сигнала (Polikov et al., 2005; Уинслоу и Треско, 2010; Hochberg et al., 2012). Следовательно, в настоящее время внутрикортикальные измерения нельзя использовать для клинических приборов ИМТ в Японии и некоторых других странах. Электроды системы WIMAGINE устанавливаются эпидурально. Однако эпидуральное пространство находится за пределами гематоэнцефалического барьера. Это приводит к воздействию на электроды хронического воспаления, что приводит к постепенному ухудшению качества сигнала в течение нескольких месяцев (Schendel et al., 2013). Таким образом, эпидуральная ЭКоГ потенциально может давать сигналы более низкого качества, чем субдуральная ЭКоГ.
Электроды системы WIMAGINE устанавливаются эпидурально. Однако эпидуральное пространство находится за пределами гематоэнцефалического барьера. Это приводит к воздействию на электроды хронического воспаления, что приводит к постепенному ухудшению качества сигнала в течение нескольких месяцев (Schendel et al., 2013). Таким образом, эпидуральная ЭКоГ потенциально может давать сигналы более низкого качества, чем субдуральная ЭКоГ.
Оригинальность W-HERBS
W-HERBS — первое полностью имплантируемое устройство для записи 128-канальных субдуральных сигналов ЭКоГ. Используемые здесь трехмерные электроды высокой плотности точно подогнаны к коре головного мозга и стабильно регистрируют субдуральные ЭКоГ из целевых областей головного мозга (Morris et al., 2015). Более того, эти наборы электродов могут поддерживать контакт со всей площадью коры головного мозга мотора руки (приблизительно 20 мм × 20 мм) с расстоянием между электродами 2,5 мм и предоставлять достаточную информацию для помощи движению руки в режиме реального времени. Наконец, W-HERBS считается первой полностью имплантируемой системой ECoG BMI, способной обнаруживать сигналы с широкой полосой гамма-излучения с амплитудой 4,8 мкВ и контролировать двигательные движения на основе анализа данных.
Наконец, W-HERBS считается первой полностью имплантируемой системой ECoG BMI, способной обнаруживать сигналы с широкой полосой гамма-излучения с амплитудой 4,8 мкВ и контролировать двигательные движения на основе анализа данных.
Будущее развитие W-HERBS
Второй прототип этого устройства состоит из устройства для головы и устройства для брюшной полости, потому что блоки управления данными и питанием имеют относительно высокие требования к мощности. В результате минимизация размера аккумулятора для встраивания в головное устройство исключила его работу в течение 6 часов.В будущем потребуется дальнейшее снижение энергопотребления с использованием модуля беспроводной передачи данных меньшей мощности (т. Е. 60 мВт для 24-часовой непрерывной работы с батареей 1,6 Втч).
Дальнейшее развитие требует практической биосовместимости, достигаемой с использованием герметичных корпусов для изоляции электрических частей нашего имплантируемого человеку устройства от биологических органов.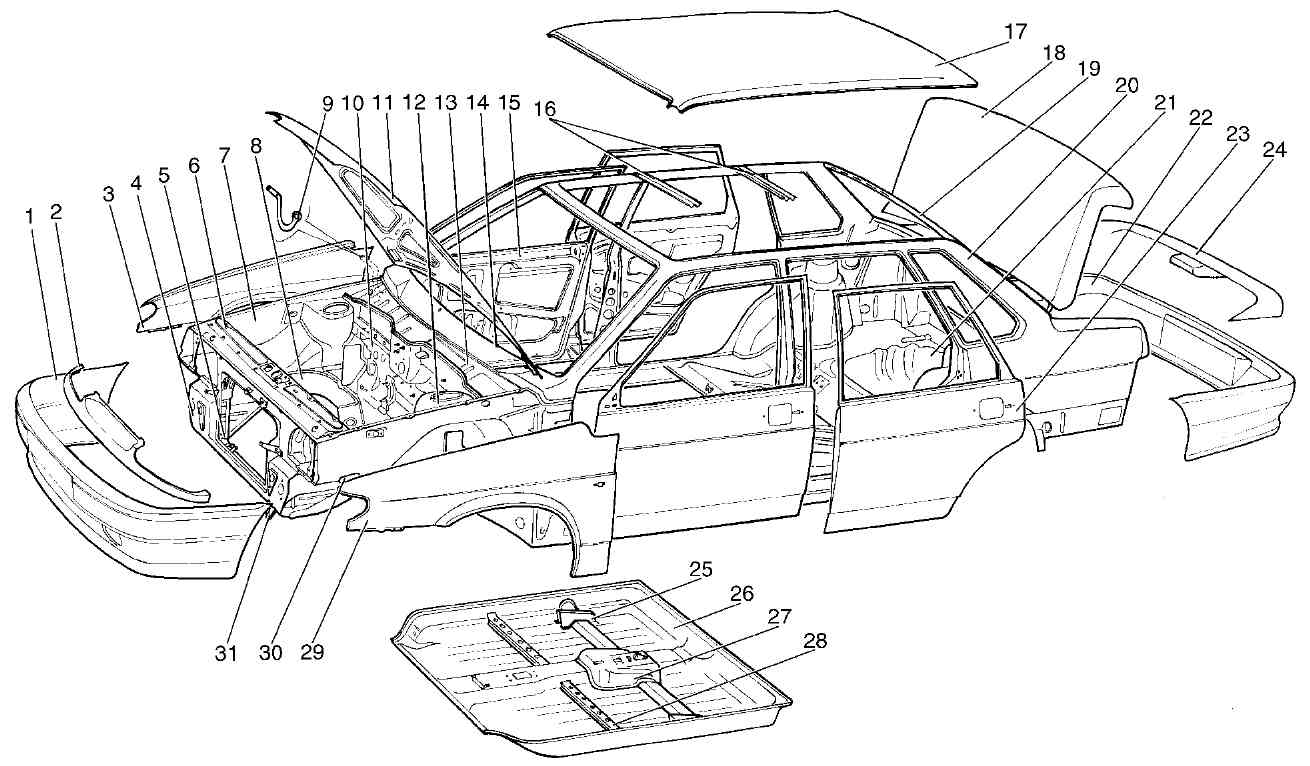 Технология уже коммерчески доступна и будет использоваться как для черепа, так и для брюшной полости в будущих исследованиях.Соответственно, наш третий прототип будет иметь фиксированные основные электрические компоненты и устройства, а также заданную форму титанового корпуса, что, в свою очередь, позволит использовать такие герметичные уплотнения.
Технология уже коммерчески доступна и будет использоваться как для черепа, так и для брюшной полости в будущих исследованиях.Соответственно, наш третий прототип будет иметь фиксированные основные электрические компоненты и устройства, а также заданную форму титанового корпуса, что, в свою очередь, позволит использовать такие герметичные уплотнения.
Заключение
Мы разработали новое полностью имплантируемое беспроводное устройство для записи ИМТ ЭКоГ человека с 128 каналами. Это устройство W-HERBS включает в себя несколько 3D-электродов высокой плотности, которые могут быть приспособлены к отдельным кортикальным формам, блоки измерения ЭКоГ, которые усиливают и оцифровывают сигналы ЭКоГ с частотой 1 кГц и передают данные, титановый кожух, который подходит для удаленной области черепа, растягиваемая спираль кабель, подкожно соединяющий головные и абдоминальные устройства, блок управления данными и питанием, который обменивается данными с рабочей станцией по Wi-Fi и подает мощность 400 мВт на расстоянии 5–25 мм, а также программное обеспечение для записи и анализа передаваемых данных.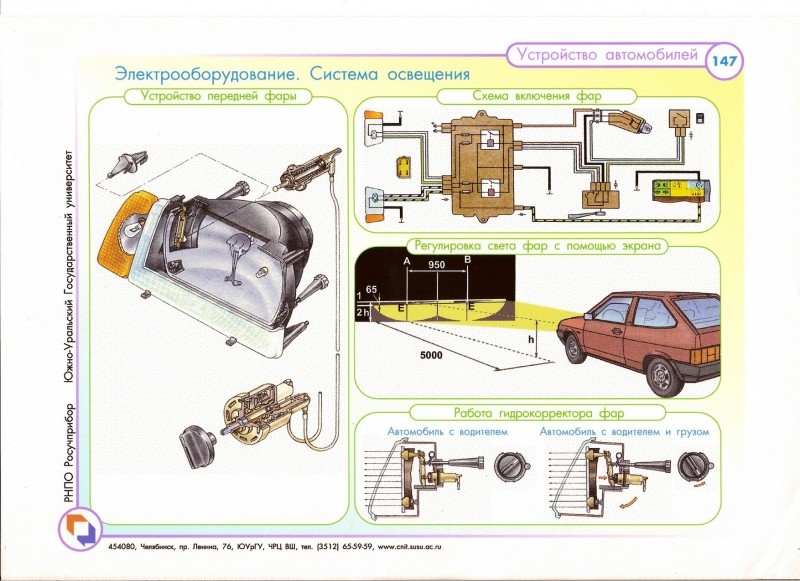 Мы продемонстрировали, что W-HERBS в достаточной степени выполняет измерения ИМТ ЭКоГ, предоставляя данные, которые можно анализировать на основе синусоидальных волн с амплитудой 4,8 мкВ и полосой пропускания 60–200 Гц.
Мы продемонстрировали, что W-HERBS в достаточной степени выполняет измерения ИМТ ЭКоГ, предоставляя данные, которые можно анализировать на основе синусоидальных волн с амплитудой 4,8 мкВ и полосой пропускания 60–200 Гц.
Заявление об этике
Исследование было одобрено Комитетом по этике исследований Hamamatsu Pharma (Номер одобрения: PR0098-1; Дата одобрения: 19 ноября 2012 г .; Содержание: Процедура согласия, используемая для владельцев животных).
Авторские взносы
KM является основным проводником исследований: разработка технических характеристик устройства, сборка и исследование производительности, а также написание документов.MH, SM, TG, TYa и ToY — врачи, а HS — физиотерапевт, разработавшие систему с медицинских аспектов: они разработали дизайн футляра черепа и провели эксперименты на животных. TS, HA и TYo отвечают за производство полупроводников и схемы беспроводной передачи данных. YO и FS создали беспроводные источники питания и исследовали их производительность.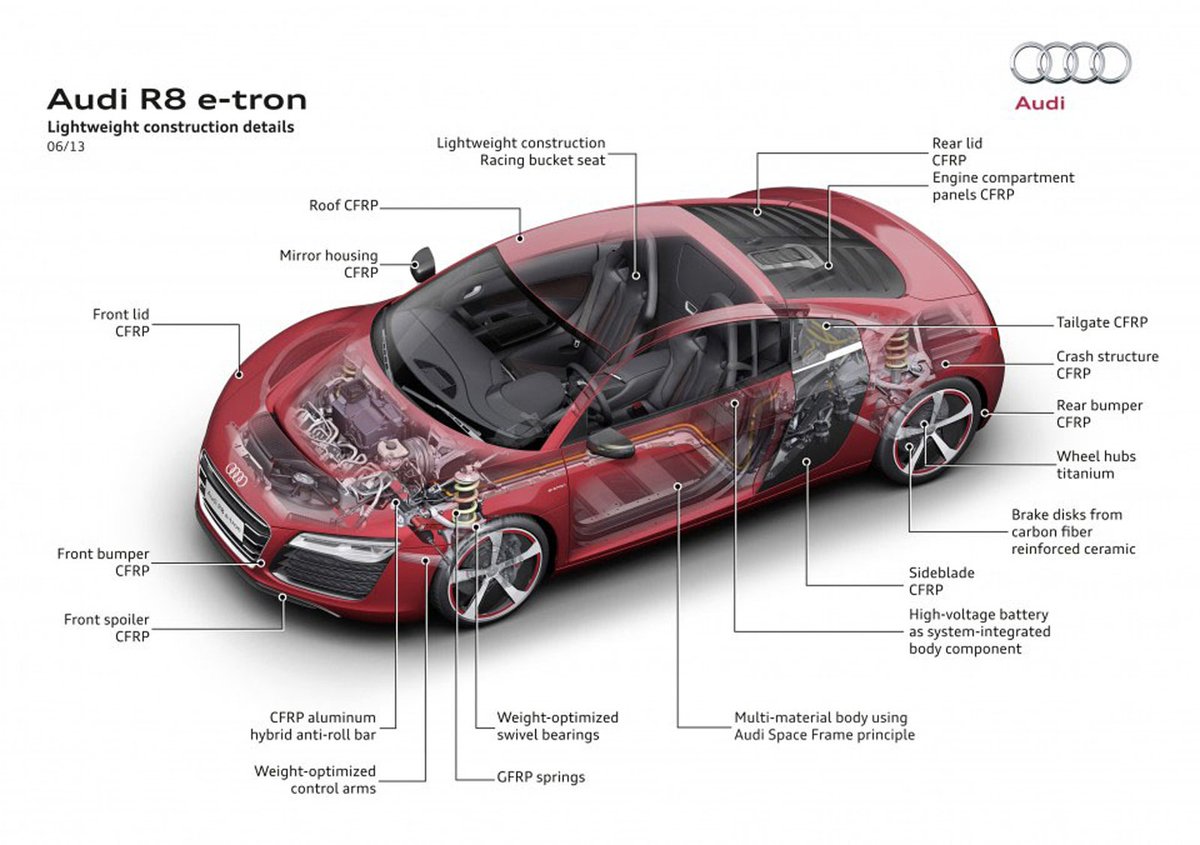
Финансирование
Это исследование было (частично) поддержано грантом «Разработка интерфейса мозг-машина и разработка технологий BMI для клинического применения», выполненного в рамках Программы стратегических исследований в области наук о мозге (SRPBS) Японского агентства медицинских исследований и разработок (AMED), KAKENHI (233
, 26282165, 25702035 и 18H04166) от Японского общества содействия науке (JSPS), грантом на научные исследования в области здравоохранения (23100101) от Министерства здравоохранения, труда и социального обеспечения, путем проведения исследований и разработки технологий для высокоскоростная беспроводная связь изнутри и снаружи тела и крупномасштабный анализ данных мозга и их применение для ИМТ от заказных исследований Национального института информационных и коммуникационных технологий (NICT).
Заявление о конфликте интересов
Авторы заявляют, что исследование проводилось в отсутствие каких-либо коммерческих или финансовых отношений, которые могут быть истолкованы как потенциальный конфликт интересов.
Сноски
- http://www.fftw.org/
Список литературы
Бортон, Д. А., Инь, М., Асерос, Дж., И Нурмикко, А. (2013). Имплантируемый беспроводной нейронный интерфейс для записи динамики корковых цепей движущихся приматов. J. Neural Eng. 10: 026010. DOI: 10.1088 / 1741-2560 / 10/2/026010
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Банди, Д. Т., Пахва, М., Шрама, Н., и Лойтхардт, Э. К. (2016). Расшифровка трехмерных движений с использованием электрокортикографических сигналов у людей. J. Neural Eng. 13: 026021. DOI: 10.1088 / 1741-2560 / 13/2/026021
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Чао, З. К., Нагасака, Ю., и Фуджи, Н. (2010). Долговременное асинхронное декодирование движения руки с использованием электрокортикографических сигналов у обезьян. Фронт. Neuroeng. 3: 3. DOI: 10.3389 / fneng.2010.00003
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Charvet, G. , Sauter-Starace, F., Foerster, M., Ratel, D., Chabrol, C., Porcherot, J., et al. (2013). WIMAGINE ((R)): 64-канальный имплант для записи ЭКоГ для людей. конф. Proc. IEEE Eng. Med. Биол. Soc. 2013, 2756–2759.DOI: 10.1109 / EMBC.2013.6610111
, Sauter-Starace, F., Foerster, M., Ratel, D., Chabrol, C., Porcherot, J., et al. (2013). WIMAGINE ((R)): 64-канальный имплант для записи ЭКоГ для людей. конф. Proc. IEEE Eng. Med. Биол. Soc. 2013, 2756–2759.DOI: 10.1109 / EMBC.2013.6610111
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Коллингер, Дж. Л., Уодлингер, Б., Дауни, Дж. Э., Ван, В., Тайлер-Кабара, Э. К., Вебер, Д. Дж. И др. (2013). Высокопроизводительный нейропротезный контроль у человека с тетраплегией. Ланцет 381, 557–564. DOI: 10.1016 / S0140-6736 (12) 61816-9
CrossRef Полный текст | Google Scholar
Фрейзер, Г. В., Чейз, С. М., Уитфорд, А., и Шварц, А. Б. (2009).Управление интерфейсом мозг-компьютер без сортировки спайков. J. Neural Eng. 6: 055004. DOI: 10.1088 / 1741-2560 / 6/5/055004
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Хирата, М., Мацусита, К., Судзуки, Т., Йошида, Т., Сато, Ф., Моррис, С. и др. (2011).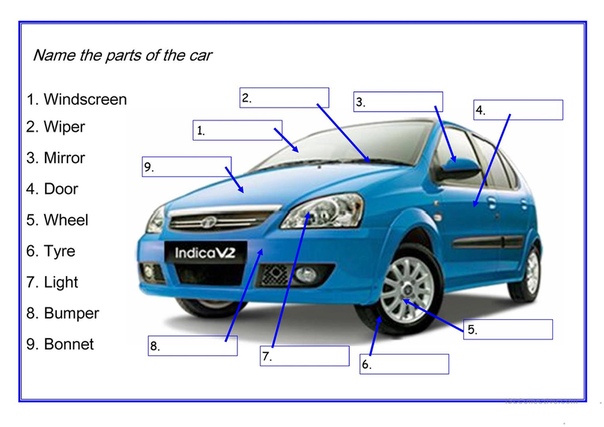 Полностью имплантируемая беспроводная система для взаимодействия человеческого мозга с машиной с использованием электродов на поверхности мозга: W-HERBS. IEICE Trans. Commun. E94.B, 2448–2453. DOI: 10.1587 / transcom.E94.B.2448
Полностью имплантируемая беспроводная система для взаимодействия человеческого мозга с машиной с использованием электродов на поверхности мозга: W-HERBS. IEICE Trans. Commun. E94.B, 2448–2453. DOI: 10.1587 / transcom.E94.B.2448
CrossRef Полный текст | Google Scholar
Hiremath, S. V., Chen, W., Wang, W., Foldes, S., Yang, Y., Tyler-Kabara, E. C., et al. (2015). Обучение мозговому компьютерному интерфейсу для систем на основе электрокортикографии и внутрикортикальных массивов микроэлектродов. Фронт. Интегр. Neurosci. 9:40. DOI: 10.3389 / fnint.2015.00040
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Hochberg, L.R., Bacher, D., Jarosiewicz, B., Masse, N.Y., Simeral, J.D., Vogel, J., et al. (2012). Дотягивайтесь до людей с тетраплегией с помощью нейронно-управляемой роботизированной руки. Природа 485, 372–375. DOI: 10.1038 / nature11076
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Хохберг, Л. Р., Серруя, М. Д., Friehs, Г. М., Муканд, Дж. А., Салех, М., Каплан, А. Х. и др. (2006). Управление нейрональным ансамблем протезных устройств у человека с тетраплегией. Природа 442, 164–171. DOI: 10.1038 / nature04970
Р., Серруя, М. Д., Friehs, Г. М., Муканд, Дж. А., Салех, М., Каплан, А. Х. и др. (2006). Управление нейрональным ансамблем протезных устройств у человека с тетраплегией. Природа 442, 164–171. DOI: 10.1038 / nature04970
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Местаис, К.С., Чарвет, Г., Заутер-Стараче, Ф., Ферстер, М., Рател, Д., и Бенабид, А. Л. (2015). WIMAGINE: беспроводной 64-канальный имплант для записи ЭКоГ для долгосрочного клинического применения. IEEE Trans. Neural Syst. Rehabil. Англ. 23, 10–21. DOI: 10.1109 / TNSRE.2014.2333541
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Моррис С., Хирата М., Сугата Х., Гото Т., Мацусита К., Янагисава Т. и др. (2015). Кортикальные электроды, специфичные для пациента, для имплантации борозды и гирали. IEEE Trans. Биомед. Англ. 62, 1034–1041. DOI: 10.1109 / TBME.2014.2329812
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Наканиши, Ю.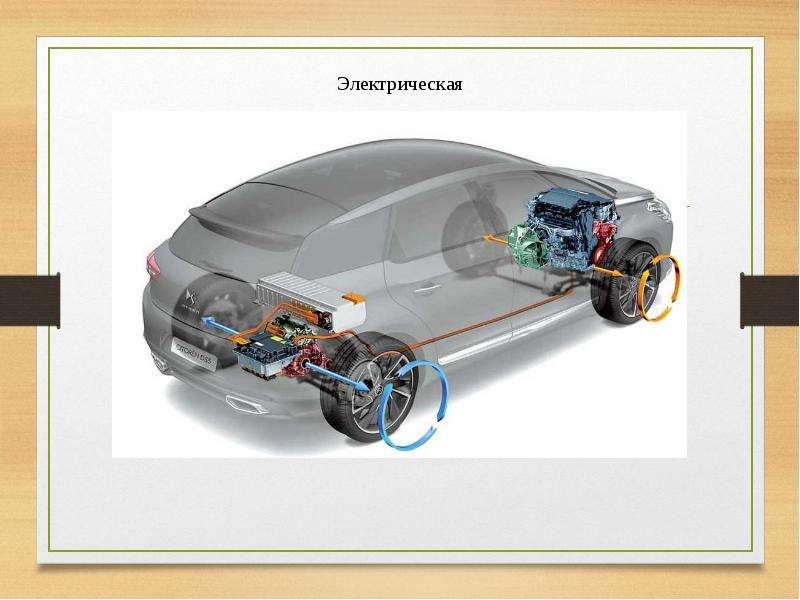 , Янагисава, Т., Шин, Д., Чен, К., Камбара, Х., Йошимура, Н., и др. (2014). Расшифровка траектории кончика пальца по электрокортикографическим сигналам у человека. Neurosci. Res. 85, 20–27. DOI: 10.1016 / j.neures.2014.05.005
, Янагисава, Т., Шин, Д., Чен, К., Камбара, Х., Йошимура, Н., и др. (2014). Расшифровка траектории кончика пальца по электрокортикографическим сигналам у человека. Neurosci. Res. 85, 20–27. DOI: 10.1016 / j.neures.2014.05.005
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Наканиши, Ю., Янагисава, Т., Шин, Д., Фукума, Р., Чен, К., Камбара, Х. и др. (2013). Прогнозирование трехмерных траекторий рук на основе сигналов ЭКоГ, зарегистрированных сенсомоторной корой головного мозга человека. PLoS One 8: e72085. DOI: 10.1371 / journal.pone.0072085
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Пистоль Т., Болл Т., Шульце-Бонхаге А., Аэрцен А. и Меринг К. (2008). Прогнозирование траекторий движения рук по ЭКоГ-записям у людей. Дж.Neurosci. Методы 167, 105–114. DOI: 10.1016 / j.jneumeth.2007.10.001
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Поликов В. С., Треско П. А., Райхерт В.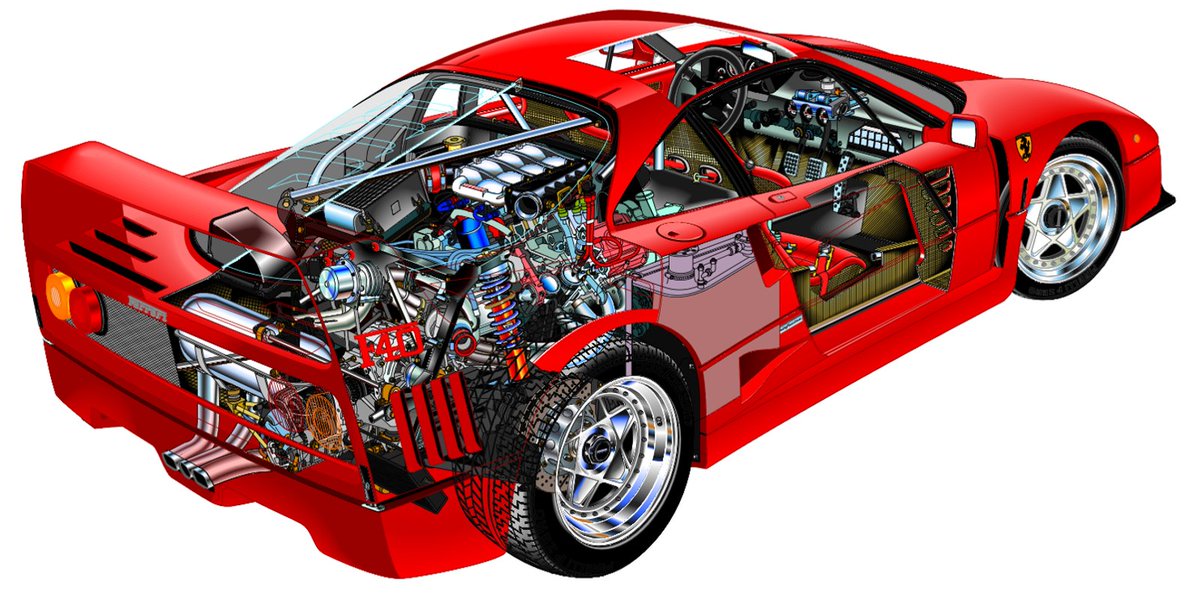 М. (2005). Ответ мозговой ткани на хронически имплантированные нервные электроды. J. Neurosci. Методы 148, 1–18. DOI: 10.1016 / j.jneumeth.2005.08.015
М. (2005). Ответ мозговой ткани на хронически имплантированные нервные электроды. J. Neurosci. Методы 148, 1–18. DOI: 10.1016 / j.jneumeth.2005.08.015
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Шалк, Г., Миллер, К. Дж., Андерсон, Н. Р., Уилсон, Дж.A., Smyth, M.D., Ojemann, J.G., et al. (2008). Двумерное управление движением с помощью электрокортикографических сигналов у человека. J. Neural Eng. 5, 75–84. DOI: 10.1088 / 1741-2560 / 5/1/008
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Шендель А.А., Тонгпанг С., Бродник С.К., Ричнер Т.Дж., Линдвиг Б.Д., Кругнер-Хигби Л. и др. (2013). Метод визуализации краниального окна для мониторинга роста сосудов вокруг хронически имплантированных устройств микро-ЭКоГ. J. Neurosci. Методы 218, 121–130. DOI: 10.1016 / j.jneumeth.2013.06.001
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Шерер Р., Занос С. П., Миллер К. Дж., Рао Р. П. и Одеманн Дж. Г. (2009). Классификация контралатеральных и ипсилатеральных движений пальцев для электрокортикографических интерфейсов мозг-компьютер. Neurosurg. Фокус 27: E12. DOI: 10.3171 / 2009.4.FOCUS0981
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Слуцкий, М.У., Джордан, Л. Р., Криг, Т., Чен, М., Могул, Д. Дж., И Миллер, Л. Е. (2010). Оптимальное расположение массивов поверхностных электродов для приложений интерфейса мозг-машина. J. Neural Eng. 7: 26004. DOI: 10.1088 / 1741-2560 / 7/2/026004
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Веллист, М., Перель, С., Сполдинг, М. К., Уитфорд, А. С., и Шварц, А. Б. (2008). Кортикальный контроль протеза руки для самостоятельного кормления. Природа 453, 1098–1101.DOI: 10.1038 / nature06996
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Уинслоу, Б. Д., Треско, П. А. (2010). Количественный анализ реакции тканей на хронически имплантированные микропроволочные электроды в коре головного мозга крысы. Биоматериалы 31, 1558–1567. DOI: 10.1016 / j.biomaterials.2009.11.049
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Янагисава Т., Хирата М., Сайто Ю., Гото Т., Кишима Х., Фукума Р. и др.(2011). Контроль протеза руки в реальном времени с помощью сигналов электрокортикографии человека. J. Neurosurg. 114, 1715–1722. DOI: 10.3171 / 2011.1.JNS101421
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Янагисава Т., Хирата М., Сайто Ю., Като А., Сибуя Д., Камитани Ю. и др. (2009). Расшифровка нейронов с помощью гиральных и интрапулькальных электрокортикограмм. Neuroimage 45, 1099–1106. DOI: 10.1016 / j.neuroimage.2008.12.069
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Янагисава, Т., Хирата, М., Сайто, Ю., Кишима, Х., Мацусита, К., Гото, Т. и др. (2012). Электрокортикографический контроль протеза руки у парализованных больных. Ann. Neurol. 71, 353–361. DOI: 10.1002 / ana.22613
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Инь, М., Бортон, Д. А., Асерос, Дж., Паттерсон, В. Р., Нурмикко, А. В. (2013). 100-канальное герметичное имплантируемое устройство для хронических беспроводных нейросенсоров. IEEE Trans.Биомед. Circuits Syst. 7, 115–128. DOI: 10.1109 / TBCAS.2013.2255874
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Йокои, Х., Кита, К., Накамура, Т., Като, Р., Эрнандес, Р., Араи, Т. и др. (2009). Взаимоадаптируемые аппараты ЭМГ для протеза руки. Внутр. J. Факт. Автомат. Робот. Soft Comp. 1, 74–83.
Google Scholar
Йошида, Т., Масуи, Ю., Эки, Р., Ивата, А., Йошида, М., и Уэмацу, К. (2010). Усилитель нейронной записи с подавлением низкочастотных шумов. IEICE Trans. Электроны. E93.C, 849–854. DOI: 10.1109 / TBCAS.2007.914490
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Йошида, Т., Суэиси, К., Ивата, А., Мацусита, К., Хирата, М., и Судзуки, Т. (2011). Малошумящий усилитель с высокой линейностью и регулируемой полосой пропускания для нейронных записывающих систем. Jpn. J. App. Phy. 50: 04DE07.
Google Scholar
Более эффективных моделей машинного обучения для работы на устройстве
Нейронные сети отвечают за самые последние достижения в области искусственного интеллекта, включая многие из последних возможностей Alexa.Но нейронные сети, как правило, большие и громоздкие, и в последние годы команда Alexa изучает методы, позволяющие сделать их достаточно эффективными для работы на устройстве.
В этом году на выставке Interspeech мы и наши коллеги представляем две статьи, в которых описываются методы снижения сложности сетей, обрабатывающих аудиоданные. Одна из сетей распознает отдельные произносимые слова; другой — обнаружение акустических событий.
Обнаружение акустических событий — это технология, лежащая в основе Alexa Guard, функции, которую клиенты могут включить на устройствах Echo, чтобы обнаруживать и уведомлять их о звуке дыма и сигналов тревоги по угарному газу или о разбивании стекла, когда они находятся вдали от дома.С помощью Guard запуск детектора на устройстве помогает защитить конфиденциальность клиентов, гарантируя, что только очень подозрительные звуки будут передаваться для подтверждения более мощному детектору, работающему в облаке.
Обе модели полагаются на сверточные нейронные сети, хотя и по-разному. Первоначально разработанные для обработки изображений, сверточные нейронные сети или CNN многократно применяют один и тот же «фильтр» к небольшим фрагментам входных данных. Для распознавания объектов, например, CNN может проходить через файл изображения в блоках восемь на восемь пикселей, проверяя каждый блок на наличие шаблонов, связанных с конкретными объектами.Таким образом, сеть может обнаруживать объекты независимо от того, где они находятся на изображении.
Подобно изображениям, аудиосигналы могут быть представлены как двумерные данные. В распознавании речи, например, стандартным является представление сигналов с использованием мелкочастотных кепстральных коэффициентов, или MFCC. Кепстральные коэффициенты сигнала представляют собой последовательность чисел, описывающих его частотные характеристики; cepstral означает преобразование спектральных свойств . «Мел» означает, что полосы частот выбираются для концентрации данных в частотных диапазонах, к которым люди особенно чувствительны.Сопоставление кепстральных коэффициентов со временем дает двухмерный снимок акустического сигнала.
При распознавании объектов CNN обычно применяет несколько фильтров к каждому блоку изображения, каждый из которых представляет различную возможную ориентацию края объекта. Наша система также применяет ряд различных фильтров, каждый из которых настроен на характеристики определенных слов. В нашем случае, однако, каждый фильтр имеет отношение только к некоторым кепстральным коэффициентам, а не ко всем.
Мы используем эту разницу для повышения эффективности сети.Наша сетевая архитектура применяет каждый фильтр только к соответствующим кепстральным коэффициентам, уменьшая общее количество операций, необходимых для идентификации конкретного слова. В ходе экспериментов мы сравнили его с традиционной CNN и обнаружили, что, когда мы фиксировали точность вывода, это уменьшало вычислительную нагрузку (измеряемую в FLOPS или операциях с плавающей запятой в секунду) на 39,7% для задач классификации команд и на 49,3%. по задачам распознавания чисел.
Традиционная CNN (слева) и наша более эффективная CNN, которая применяет фильтры (от Conv1_1 до Conv1_3) только к соответствующим кепстральным коэффициентам.Обратите внимание, что в представлениях сигналов время — это ось y.
В другой нашей статье мы объединяем два разных метода для повышения эффективности сети обнаружения звука: дистилляция и квантование. Дистилляция — это метод, в котором выходные данные большой и мощной нейронной сети — в данном случае CNN — используются для обучения более компактной и более эффективной сети — в данном случае — неглубокой сети с долгосрочной и краткосрочной памятью, или LSTM.
Квантование — это процесс рассмотрения всего диапазона значений, которые может принимать конкретная переменная, и разделения его на фиксированное количество интервалов.Затем все значения в заданном интервале аппроксимируются одним числом.
Типичная нейронная сеть состоит из большого количества простых обрабатывающих узлов , каждый из которых получает данные от нескольких других узлов и передает данные еще нескольким. Соединения между узлами имеют весовых коэффициентов , которые указывают, насколько большую роль играют выходы одного узла в вычислениях, выполняемых другим. Обучение нейронной сети во многом сводится к корректировке ее весовых коэффициентов связи.
Поскольку хранение нейронной сети в памяти по существу сводится к хранению ее весов, квантование этих весов может значительно уменьшить объем памяти, занимаемой сетью.
В нашем случае мы квантуем не только веса нашей меньшей сети (LSTM), но и ее входные значения. LSTM обрабатывает последовательности данных по порядку, и выходные данные соответствуют каждому входному фактору во входных и выходных данных, которые ему предшествовали. Мы квантуем не только исходные входные данные в LSTM, но и каждый выход, который, в свою очередь, становится входом на следующем этапе обработки.
Кроме того, мы квантуем LSTM во время обучения, а не после него. Вместо того, чтобы полностью обучать LSTM и только затем квантовать его веса для хранения, мы заставляем его выбирать квантованные веса во время обучения. Это означает, что процесс обучения настраивает сеть на квантованные веса, а не на непрерывные значения, которые квантование просто аппроксимирует.
Когда мы сравниваем наш обученный дистилляцией и квантованный LSTM с LSTM с таким же количеством узлов, обученных непосредственно на тех же данных, мы обнаруживаем, что он не только имеет гораздо меньший объем памяти — одну восьмую размера — но также демонстрирует Повышение точности на 15% в результате обучения дистилляции.
Благодарности : Исинь Гао, Шив Виталадевуни, Виктор Розгич, Спирос Мацукас, Чао Ван
Искусственный интеллект и машинное обучение в программном обеспечении как медицинском устройстве
Программное обеспечение искусственного интеллекта и машинного обучения (AI / ML) как план действий медицинского устройства
The U.Управление по санитарному надзору за качеством пищевых продуктов и медикаментов США (FDA) выпустило «План действий на основе искусственного интеллекта / машинного обучения (AI / ML) в качестве медицинского устройства (SaMD)», разработанный Центром передового опыта в области цифрового здравоохранения Центра устройств и радиологического здравоохранения.
План действий является прямым ответом на отзывы заинтересованных сторон на дискуссионный документ от апреля 2019 года «Предлагаемая нормативно-правовая база для модификаций программного обеспечения на основе искусственного интеллекта / машинного обучения в качестве медицинского устройства» и описывает пять действий, которые FDA намерено предпринять.
Скачать план действий (PDF — 747 КБ)
Технологии искусственного интеллекта и машинного обучения могут трансформировать здравоохранение, извлекая новые и важные идеи из огромного количества данных, генерируемых в процессе оказания медицинской помощи каждый день. Производители медицинского оборудования используют эти технологии для обновления своей продукции, чтобы лучше помогать поставщикам медицинских услуг и улучшать уход за пациентами.
Центр устройств и радиологического здоровья (CDRH) FDA рассматривает нормативную базу для этих технологий, основанную на полном жизненном цикле продукта, которая позволила бы вносить изменения на основе реального обучения и адаптации, обеспечивая при этом безопасность и эффективность программное обеспечение как медицинское устройство.
На этой странице:
Что такое искусственный интеллект и машинное обучение?
Искусственный интеллект в широком смысле определяется как наука и техника создания интеллектуальных машин, особенно интеллектуальных компьютерных программ (McCarthy, 2007). Искусственный интеллект может использовать различные методы, включая модели, основанные на статистическом анализе данных, экспертные системы, которые в основном полагаются на утверждения «если-то», и машинное обучение.
Машинное обучение — это метод искусственного интеллекта, который можно использовать для разработки и обучения программных алгоритмов для обучения и действий с данными.Разработчики программного обеспечения могут использовать машинное обучение для создания алгоритма, который «заблокирован», чтобы его функция не изменялась, или «адаптивного», чтобы его поведение могло меняться со временем на основе новых данных.
Некоторые реальные примеры технологий искусственного интеллекта и машинного обучения включают:
- Система визуализации, использующая алгоритмы для предоставления диагностической информации о раке кожи у пациентов.
- Интеллектуальное сенсорное устройство, оценивающее вероятность сердечного приступа.
Как искусственный интеллект и машинное обучение трансформируют медицинские устройства?
Технологии искусственного интеллекта (AI) и машинного обучения (ML) могут трансформировать здравоохранение за счет получения новых и важных выводов из огромного количества данных, генерируемых в ходе оказания медицинской помощи каждый день. Производители медицинского оборудования используют эти технологии для обновления своей продукции, чтобы лучше помогать поставщикам медицинских услуг и улучшать уход за пациентами.Одно из величайших преимуществ AI / ML в программном обеспечении заключается в его способности учиться на реальном использовании и опыте, а также в его способности улучшать свою производительность.
Как FDA рассматривает вопрос о регулировании медицинских устройств с искусственным интеллектом и машинным обучением?
Традиционно FDA рассматривает медицинские изделия с помощью соответствующих предпродажных методов, таких как предпродажная очистка (510 (k)), классификация De Novo или предпродажное одобрение. FDA может также проверять и вносить изменения в медицинские устройства, включая программное обеспечение в качестве медицинского устройства, в зависимости от значимости или риска, который представляет собой такая модификация для пациентов.Ознакомьтесь с текущим руководством FDA по подходу, основанному на оценке рисков, для модификаций программного обеспечения 510 (k).
Традиционная парадигма регулирования медицинских устройств FDA не была разработана для технологий адаптивного искусственного интеллекта и машинного обучения. В соответствии с текущим подходом FDA к модификациям программного обеспечения, FDA ожидает, что многие из этих изменений программного обеспечения устройства, основанных на искусственном интеллекте и машинном обучении, могут потребовать предпродажной проверки.
2 апреля 2019 года FDA опубликовало дискуссионный документ «Предлагаемая нормативная база для модификации программного обеспечения на основе искусственного интеллекта / машинного обучения (AI / ML) в качестве медицинского устройства (SaMD) — дискуссионный документ и запрос обратной связи», в котором описывается фонд FDA для потенциального подхода к предпродажной проверке модификаций программного обеспечения на основе искусственного интеллекта и машинного обучения.
Идеи, описанные в документе для обсуждения, основываются на методах наших текущих предмаркетинговых программ и основываются на принципах категоризации рисков IMDRF, структуре риска FDA, принципах управления рисками, описанных в руководстве по модификации программного обеспечения, и подходе к общему жизненному циклу продукта на уровне организации ( также предусмотрена в Программе предварительной сертификации программного обеспечения для цифрового здравоохранения (Pre-Cert)).
В рамках, описанных в документе для обсуждения, FDA предусматривает «заранее определенный план управления изменениями» в предмаркетных представлениях.Этот план будет включать типы ожидаемых модификаций, называемых «предварительными спецификациями программного обеспечения как медицинского устройства», и связанную с ними методологию, используемую для реализации этих изменений контролируемым способом, который управляет рисками для пациентов, именуемых « Протокол изменения алгоритма ».
В этом потенциальном подходе FDA ожидает от производителей обязательств по обеспечению прозрачности и реального мониторинга производительности для программного обеспечения на основе искусственного интеллекта и машинного обучения как медицинского устройства, а также периодических обновлений FDA о том, какие изменения были реализованы как часть утвержденных предварительных спецификаций и протокол изменения алгоритма.
Такая нормативно-правовая база может позволить FDA и производителям оценивать и контролировать программный продукт от его довыночной разработки до постмаркетинговых показателей. Такой подход может позволить регулирующему надзору FDA использовать возможности многократного улучшения искусственного интеллекта и программного обеспечения на основе машинного обучения в качестве медицинского устройства, обеспечивая при этом безопасность пациентов.
В рамках Плана действий AI / ML FDA подчеркивает свое намерение разработать обновление предлагаемой нормативной базы, представленной в дискуссионном документе SaMD на основе AI / ML, в том числе путем выпуска проекта руководства по заранее определенному изменению. контрольный план.
Новости и обновления в области искусственного интеллекта и машинного обучения
Свяжитесь с нами
Если у вас есть вопросы об искусственном интеллекте, машинном обучении или других темах цифрового здравоохранения, задайте вопрос о регуляторных политиках цифрового здравоохранения.
Список литературы
Маккарти, Дж. (2007). Что такое искусственный интеллект? Стэнфордский университет, Стэнфорд, Калифорния.