Лидар. Применение технологии LiDAR. Карты и беспилотные автомобили
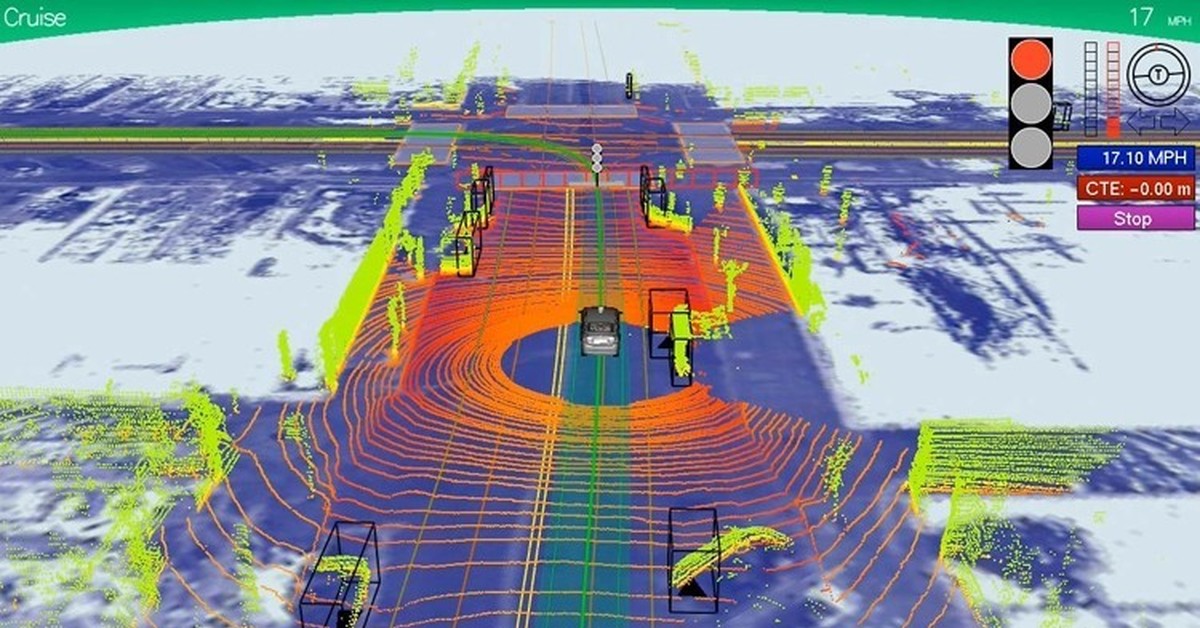
Технология в автономных транспортных средствахОжидается, что автономные автомобили скоро появятся на дорогах, которые произведут революцию в автомобильном секторе. Без лидара автономные транспортные средства перестанут существовать. Лидар следует называть глазами автономного транспортного средства, поскольку он смотрит на окружение, вычисляет расстояние, определяет препятствия впереди, освещает объекты лазером, а затем создает цифровое изображение высокого разрешения. Он также используется для предотвращения столкновений, путем измерения расстояния между автомобилем и любым другим препятствием перед ним. Это делается путем установки модуля на бампер или крышу. Адаптивная система круиз-контроля в автономном автомобиле получает информацию от датчиков, с помощью которых она решает, когда включать тормоза, замедляться либо ускоряться.
Lidar и изменение климата
Сверхвысокое разрешение и точные изображения захвата подчеркивают даже мельчайшие детали.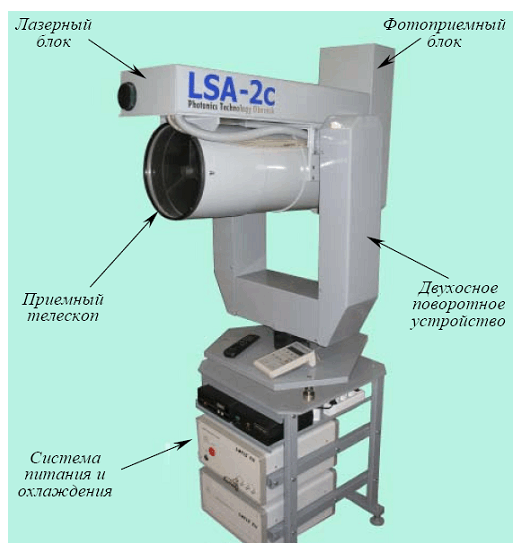 По этой причине ученые и геологи все чаще отдают предпочтение данной технологии. Лидар может помочь отслеживать процессы ведения сельского хозяйства более эффективно, чем любой другой метод.
По этой причине ученые и геологи все чаще отдают предпочтение данной технологии. Лидар может помочь отслеживать процессы ведения сельского хозяйства более эффективно, чем любой другой метод.
LiDAR в космосе
НАСА разработало для международной космической станции инструмент под названием GEDI (исследование динамики глобальной экосистемы), который обеспечивает уникальное трехмерное изображение лесов Земли и помогает предоставить информацию об углеродном цикле, который ранее не был доступен. GEDI предоставляет жизненно важную информацию о влиянии деревьев на количество углерода в атмосфере. Используя эту информацию, ученые теперь могут определить точный уровень углерода, который хранится в лесах, и количество деревьев, которые необходимо посадить, чтобы компенсировать влияние выбросов парниковых газов.
Геодезия
Геодезия является одной из самых известных областей применения технологии. Съемка используется в областях строительства, городского планирования и изучения топографии региона.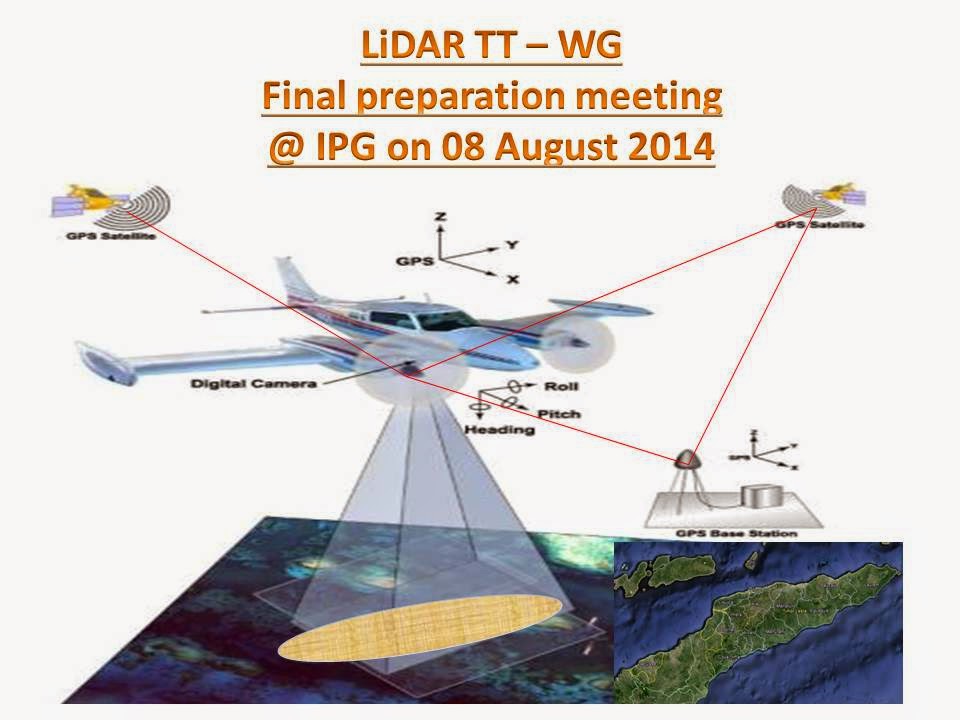 При съемке материалы собираются очень быстро, превосходя обычные методы. Пространственные модели, созданные с использованием LiDAR, имеют незначительную погрешность, экономят деньги и позволяют принимать решения быстрее. При съемке точки преобразуются в цифровую модель рельефа (ЦМР). ЦМР может иметь любую текстуру в зависимости от области применения и плотности.
При съемке материалы собираются очень быстро, превосходя обычные методы. Пространственные модели, созданные с использованием LiDAR, имеют незначительную погрешность, экономят деньги и позволяют принимать решения быстрее. При съемке точки преобразуются в цифровую модель рельефа (ЦМР). ЦМР может иметь любую текстуру в зависимости от области применения и плотности.
Археология
Для исследование старых археологических раскопок, здесь лидар полезен из-за исключительной детализации, которую он может сделать. При этом экономится время, а также усилия археологов, позволяя им «воскрешать» объекты, которые раньше было практически невозможно создать.
Потрясающие трехмерные изображения древнего города майя, были созданы двумя археологами с помощью лидара. Эта модель позволила совершенно по-другому взглянуть на структуру города и назначение отдельных зданий.
Что представляют собой данные лазерной съемки?—Справка
Лидар (Lidar — Light Identification, Detection and Ranging) — это технология получения и обработки информации дистанционного зондирования с помощью активных оптических систем (лазеров), использующих, в том числе, явления отражения света от поверхности Земли с проведением высокоточных измерений X, Y, Z координат. Лидар, изначально использовался в приложениях воздушной лазерной съемки, является с экономической точки зрения прекрасной альтернативой традиционной съемке с использованием фотограмметрической обработки данных. Данные лидарной съемки представляют собой наборов данных, содержащих облака точек, которые могут управляться, отображаться, анализироваться и совместно использоваться с помощью ArcGIS.
Лидар, изначально использовался в приложениях воздушной лазерной съемки, является с экономической точки зрения прекрасной альтернативой традиционной съемке с использованием фотограмметрической обработки данных. Данные лидарной съемки представляют собой наборов данных, содержащих облака точек, которые могут управляться, отображаться, анализироваться и совместно использоваться с помощью ArcGIS.
Основными компонентами аппаратного обеспечения лидара являются: транспортное средство или устройство (самолет, вертолет, штатив), система лазерного сканирования, GPS (Глобальная система позиционирования) и INS (Внутренняя система позиционирования). INS (Внутренняя система позиционирования) измеряет крен, тангаж и рысканье системы.
Лидар — это активный оптический сенсор, испускающий лазерные лучи в сторону цели во время движения транспортного средства по специальным съемочным маршрутам. Отражение лазера от объекта принимается и анализируется сенсором. Приемники записывают точное время, прошедшее с момента испускания лазерного импульса системой до момента его возвращения, для того чтобы вычислить расстояние между сенсором и целью. Совместно с информацией о внутреннем и внешнем позиционировании (GPS и INS), эти расстояния преобразуются в трехмерные точки, отображающие поверхность отражения лазерных импульсов.
Совместно с информацией о внутреннем и внешнем позиционировании (GPS и INS), эти расстояния преобразуются в трехмерные точки, отображающие поверхность отражения лазерных импульсов.
Точечные данные подвергаются последующей обработке после сбора с учетом диапазона времени работы лазера, угла сканирования, координат GPS, информации о внутреннем позиционировании (INS), что позволяет получить точные координаты x,y,z.
Отражения лазерных импульсов лидара
Лазерные импульсы, испускаемые лидаром, отражаются как от находящихся на поверхности земли, так и от находящихся над землей объектов: от растительного покрова, строений, мостов и т.д. Один лазерный импульс может отражаться и возвращаться к сенсору как один раз, так и несколько. Любой лазерный импульс претерпевает несколько отражений при его движении к земной поверхности, разделяясь на столько частей, от какого количества поверхностей он отразился.
Первый возвращенный сигнал является наиболее показательным и будет соответствовать самому высокому объекту ландшафта, такому как, например, верхушка дерева либо крыша здания. Первый отраженный сигнал может также соответствовать и земной поверхности. В этом случае лидаром будет захвачено только одно отражение.
Первый отраженный сигнал может также соответствовать и земной поверхности. В этом случае лидаром будет захвачено только одно отражение.
Большое количество возвратов используется для получения высот нескольких объектов, находящихся на пути лазерного импульса. Отраженные сигналы из середины «спектра» обычно соответствуют растительности, а последние отраженные сигналы используются для моделей собственно поверхности земли.
Последнее отражение, однако, не всегда будет соответствовать земле. К примеру, рассмотрим случай, когда импульс попадает в толстую ветку и не достигает земной поверхности. В этом случае последнее отражение произошло не от земли, а от ветки.
Атрибуты точек лидара
Помимо позиционных значений x, y и z системой сохраняется также дополнительная информация. Для каждого лазерного импульса записываются и сохраняются следующие атрибуты: интенсивность, номер отражения, количество отраженных сигналов, значения классификации точки, крайние точки линии полета, значения RGB, время GPS, угол и направление сканирования. В следующей таблице описаны атрибуты, которые можно получить для каждой точки.
В следующей таблице описаны атрибуты, которые можно получить для каждой точки.
Примечание:
Перечисленные ниже атрибуты лидара не всегда сохраняются в итоговых выходных файлах. Используйте Набор данных LAS (LAS dataset) для просмотра атрибутов и классификации лидарных данных.
| Атрибут лидара | Описание |
|---|---|
Интенсивность | Сила отражения лазерного импульса, соответствующего лидарной точке. |
Номер отраженного сигнала | Испускаемый лазерный импульс может создать до пяти отраженных сигналов в зависимости от объектов, от которых он отражается и возможностей лазерного сканера. Первый возвращенный импульс будет помечен как отраженный сигнал номер один, второй — как номер два и т.д. |
Количество отраженных сигналов | Количество возвращенных сигналов — это общее число отражений данного импульса. |
Классификация точек | Каждая в дальнейшем обработанная точка лидара может содержать значение классификации, которое определяет тип объекта, отразившего лазерный импульс. Лидарные точки могут быть классифицированы на несколько категорий, таких, в том числе, как поверхность земли, верхняя граница купола леса и водная поверхность. Классам присваиваются целочисленные значения кодов, хранящиеся в файлах LAS. |
Ребро линии полета | Точки отображаются в зависимости от значения, которое равно 0 либо 1. Точки, находящиеся на линии полета, имеют значение, равное 1, остальные — равное 0. |
RGB | Данным лидара может быть присвоен атрибут RGB. Эта атрибутивная информация часто берется из изображений, которые получаются одновременно с лазерной съемкой. |
GPS-время | Время GPS, соответствующее моменту испускания импульса. Значение времени соответствует числу прошедших секунд в неделе. |
Угол сканирования | Угол сканирования — это значение в градусах из диапазона от -90 до +90. При 0 градусов лазерный импульс испускается перпендикулярно и осуществляется съемка в надир. При значении, равном -90 градусов, лазер испускает импульсы влево, а при +90 — вправо от самолета в направлении полета. Большинство систем лазерного сканирования работают в диапазоне от -30 до +30 градусов. |
Направление сканирования | Направление сканирования — это направление движения зеркала сканирующей системы в момент испускания системой лазерного сигнала. Значение, равное 1, соответствует положительному направлению сканирования, а равное 0 — отрицательному. |


 Положительное направление означает, что сканер двигается слева направо по направлению полета, а отрицательное — наоборот.
Положительное направление означает, что сканер двигается слева направо по направлению полета, а отрицательное — наоборот.Что такое облако точек?
Обработанные в дальнейшем пространственно организованные данные лазерной съемки называют облаком точек. Исходные облака точек — это огромные наборы высотных 3D точек, имеющих значения x, y, z, а также дополнительную атрибутику, например, время GPS. Конкретные поверхности, отразившие сигнал, классифицируются после начальной обработки облака точек. Высоты земной поверхности, строений, покрова леса, путепроводов и других объектов, с которыми сталкивается лазерный луч, составляют данные облака точек.
Для получения более подробной информации см. раздел Классификация лидарных точек.
Облака точек лидара в ArcGIS чаще всего представляют собой набор растров или поверхностей TIN, Набор данных LAS, Набор данных представления поверхностей (terrain) или Набор данных мозаики.
Связанные разделы
LiDAR против Радара: какая разница?
Ты знал?
Разница между LiDAR (Light Detection And Ranging) и RADAR (Radio Detection And Ranging) заключается в длине волны.

Несмотря на то, что основное назначение RADAR LiDAR и его основное назначение одно и то же — обнаружение присутствия и объема удаленных объектов, необходимо понимать разницу между этими двумя технологиями.
Light Detection and Ranging (LiDAR) — технология дистанционного зондирования на основе света. В LiDAR случае с Yellowscan идея довольно проста: направить небольшой инфракрасный лазерный луч на поверхность и измерить время, необходимое для возвращения лазера к источнику излучения. Имея угол обзора 360° (например, LiDAR с помощью вращающегося зеркала), можно получить облако точек окружающей среды. Затем специальное программное обеспечение создает трехмерное изображение, которое воспроизводит форму вокруг него LiDAR с точным расположением в пространстве.
Система RADAR работает точно так же, как иLiDAR, с той большой разницей, что в ней используются радиоволны вместо лазерного или светодиодного света. Она передает радиоволны от вращающейся или неподвижной антенны и измеряет время полета отраженного сигнала.
Длина волны RADAR составляет от 30 cm до 3 мм, в то время LiDAR как имеет микрометрический диапазон длины волны (Yellowscan LiDARs работают на 903 и 905 нм).
Так какая разница?
Благодаря своей длине волны RADAR может обнаруживать объекты на большом расстоянии и сквозь туман или облака. Но его боковое разрешение ограничено размером антенны. Разрешение стандартного RADAR составляет несколько метров на расстоянии 100 метров.
LiDAR это компактное решение, позволяющее на высоком уровне точность 3D-картографирования. На расстоянии 100 метров системы Yellowscan LiDAR имеют разрешение в несколько сантиметров.
Поэтому LiDAR используется для лазерной альтиметрии и контурного картирования. Радар, с другой стороны, используется для систем защиты самолетов от столкновений, для управления воздушным движением или для радиолокационной астрономии.
Датчики 2D-LiDAR | TiM3xx | SICK
Датчики 2D-LiDAR | TiM3xx | SICKобзор семейств продукции Русский Cesky Dansk Deutsch English Español Suomi Français Italiano 日本語 – Японский 한국어 – Корейский Nederlands Polski Portugues Svenska Türkçe Traditional Chinese
Непревзойденный мастер в обнаружении объектов и предварительной обработке данных
Преимущества
- Низкие эксплуатационные затраты
- Гибкое размещение благодаря компактным размерам
- Незначительные затраты на внедрение и замену благодаря штекеру M12 x 12 или D-Sub
- Длительный срок службы батареи при использовании в транспортных средствах с питанием от аккумуляторов
- Простой ввод в эксплуатацию благодаря наличию предварительно сконфигурированных блоков полей
- Низкие затраты на контроль больших площадей (до 235 м²) с помощью всего лишь одного сканера
- Нет необходимости в прокладке кабелей для приемника и передатчика
- Только для датчика TiM3xxS: возможность применения в приложениях, ориентированных на решение задач техники безопасности
Обзор
Непревзойденный мастер в обнаружении объектов и предварительной обработке данных
Датчик 2D-LiDAR TiM3xx, где используется технология HDDM, которая сводит к минимуму время простоя оборудования благодаря очень высокой точности измерения и невосприимчивости к постороннему свету. Его поле контроля простирается до 10 м. Быстрый и простой ввод в эксплуатацию обеспечивают 16 предварительно сконфигурированных блоков рабочих полей (по 3 поля в каждом блоке), которые выбираются путем соответствующего монтажа входов. Датчик TiM3xx отличается гибкостью, невысокой ценой и удобством в эксплуатации. Он особенно хорошо подходит для мобильного и стационарного применения в заводских системах автоматизации и системах материально-технического обеспечения производства, а также может поставляться в качестве предназначенного для систем безопасности варианта TiM3xxS, сертифицированного по стандарту EN ISO 13849-1:2015. Благодаря низкой потребляемой мощности, а также компактной и прочной конструкции датчик TiM3xx является идеальным изделием для использования на мобильных платформах.
Его поле контроля простирается до 10 м. Быстрый и простой ввод в эксплуатацию обеспечивают 16 предварительно сконфигурированных блоков рабочих полей (по 3 поля в каждом блоке), которые выбираются путем соответствующего монтажа входов. Датчик TiM3xx отличается гибкостью, невысокой ценой и удобством в эксплуатации. Он особенно хорошо подходит для мобильного и стационарного применения в заводских системах автоматизации и системах материально-технического обеспечения производства, а также может поставляться в качестве предназначенного для систем безопасности варианта TiM3xxS, сертифицированного по стандарту EN ISO 13849-1:2015. Благодаря низкой потребляемой мощности, а также компактной и прочной конструкции датчик TiM3xx является идеальным изделием для использования на мобильных платформах.
Краткий обзор
- Исключительно компактный, легкий и экономичный датчик
- Анализ полей с помощью интеллектуальных программных алгоритмов
- Доступ к интерфейсу для ввода параметров на установленном устройстве осуществляется сбоку
- Незначительная потребляемая мощность (обычно 4 Вт)
- Только для датчика TiM3xxS: изделие сертифицировано по Директиве по работе с машинным оборудованием 2006/42/EG и стандарту EN ISO 13849-1:2015
 
Industry 4. 0 is picking up speed: Automated flexibility for mobile vehicles and carts
0 is picking up speed: Automated flexibility for mobile vehicles and carts
Our modular solutions portfolio for mobile platforms now makes it possible to implement line guidance, navigation, positioning, environmental recognition, security and load handling with ease.
Learn more
Применение
Технические данные
Загрузки
Пожалуйста, подождите…
Ваш запрос обрабатывается, это может занять несколько секунд.
Для чего нужен сканер LIDAR (Лидар) в iPhone 12 и iPad Pro и что это такое?
Если появление дополнительной камеры в iPhone или iPad явно заметно, то оснащение новых устройств Apple датчиком LIDAR многими игнорируется. Что это за технология такая и насколько нужна она широкому кругу пользователей?
♥ ПО ТЕМЕ: Темы оформления на iPhone (новые иконки): как менять, где скачать, как заработать на этом.


Что такое LiDAR?
Само слово LiDAR (Light Detection and Ranging) дословно расшифровывается, как «обнаружение и определение дальности с помощью света». Эта технология активно используется в геодезии, картографии, где излучателем света является лазер.
В системах же ближнего радиуса действия его успешно заменяют светодиоды. Принцип действия LiDAR довольно прост – излучатель испускает световые волны, а приемник получает возращенный от тела отраженный сигнал, при этом учитывается воздействие рассеивающей среды. На основании времени отклика можно определить расстояние до объекта.
Так видит LiDAR окружающий мир:
Появившийся в марте 2020 года iPad Pro (обзор) и осенью – iPhone 12 Pro и iPhone 12 Pro Max как раз и получили датчик LiDAR на блоке тыловых камер.
LiDAR в iPhone 12 Pro и iPhone 12 Pro Max
LiDAR на iPad Pro
Для чего LiDAR в iPhone 12 Pro и iPad Pro?
LiDAR на iPhone может быть востребован уже сегодня и выполнять практические задачи. Можно говорить о применении технологии в съемке максимально естественных портретов с натуральным эффектом боке. LiDAR помогает волосам, ушам и другим частям тела человека или животных оставаться в фокусе. В будущем возможности этой технологии могут быть расширены и на портретные видео. Но это произойдет в следующих релизах операционной системы или даже с выходом новых моделей iPhone.
Можно говорить о применении технологии в съемке максимально естественных портретов с натуральным эффектом боке. LiDAR помогает волосам, ушам и другим частям тела человека или животных оставаться в фокусе. В будущем возможности этой технологии могут быть расширены и на портретные видео. Но это произойдет в следующих релизах операционной системы или даже с выходом новых моделей iPhone.
Видится возможным использовать LiDAR для сверхточного измерения физических расстояний. В практической жизни любой владелец актуального iPhone или iPad с такой технологией сможет без проблем точно измерить габариты своей квартиры: длину и высоту стен, кривизну пола. Но дело тут не в удовлетворении любопытства, такая информация может оказаться полезной при проведении строительных работ. Обычно там требуются дальномеры и нивелиры, но смартфон с лидаром может их подменить. Есть уже и приложения, которые с помощью лидара сканируют контуры рабочего пространства и затем создают модель производственного помещения, помещая туда трехмерные объекты.
А с учетом факта отличной работы сенсора LiDAR не только в светлое время суток, но и в темное, эта камера используется для улучшения Ночного режима съемки в iPhone 12 Pro и iPhone 12 Pro Max. Датчик отлично распознает объекты, что позволяет до 6 раз быстрее наводиться автофокусу. В результате резко уменьшится число ночных фотографий, в которых фокус оказался сбитым.
Есть и еще одна сфера применения технологии LiDAR. По утверждению компании, этот элемент был недостающим для реализации революционных приложений дополненной реальности. Датчик LIDAR от Apple способен измерять дистанцию до объектов на расстоянии до 5 метров, работая как в помещении, так и на улице. Операционная система объединяет эту информацию с данными камер, датчиков движения и обрабатывает с помощью алгоритмов компьютерного зрения. Это помогает iPhone и iPad Pro быстрее и лучше размещать на проанализированной сцене объекты дополненной реальности. Можно не сомневаться, что благодаря LIDAR уровень AR вырастет, даруя новые ощущения от возможностей техники Apple.
Надо сказать, что компания давно уже пытается освоить поле дополненной реальности, работая над соответствующим программным и аппаратным обеспечением еще с 2017 года. Тогда была представлена платформа ARKit для разработки под iOS подобных приложений. С тех пор каждое крупное обновление операционной системы появляется с демоверсией технологии AR, будь то Minecraft или Lego. И каждое улучшение камер или процессора неявно обещает и очередное улучшение технологии. Но пока еще не так много реальных возможностей ее применения.
Созданное на основе ARKit приложение автоматически и мгновенно получает информацию о размещении объектов в поле зрения камеры, улучшенный захват движения для вовлечения людей. Появление датчика LIDAR привело к обновлению ARKit и появлению нового Scene Geometry API, которое как раз и позволит использовать новый сканер для реализации невозможных ранее сценариев.
Вполне возможно, что датчик LIDAR даст новый импульс этой истории. И уже появляются приложения, использующие новую возможность устройств Apple. Так, в Apple Arcade появилась игра Hot Lava, которая превращает жилую комнату в игровую поверхность.
Так, в Apple Arcade появилась игра Hot Lava, которая превращает жилую комнату в игровую поверхность.
Устройство сканирует помещение и размещает в нем виртуальное поле из лавы и платформы для прыжков персонажа. Приложение Shapr3D дает возможность отсканировать комнату, а потом создает ее трехмерную модель для последующего редактирования. Похожий функционал и у IKEA Place, которая после анализа комнаты поможет подобрать для нее мебель.
Сканер LIDAR улучшит приложение Рулетка для вычисления габаритов материальных объектов. В нем появилась виртуальная рулетка для более детальных измерений.
Пока сфера дополненной реальности является удивительной, но вовсе не неотъемлемой частью нашей жизни. Компания Apple планомерно, шаг за шагом, делает все, чтобы это исправить.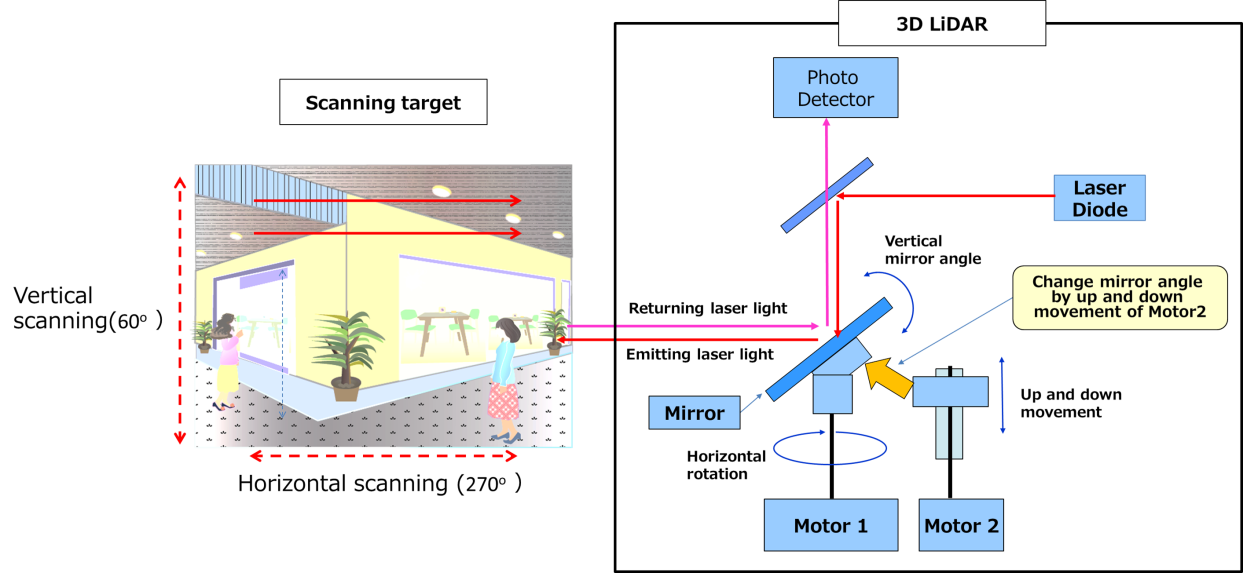 Можно только поприветствовать такое намерение разнообразить наше будущее. А сканер LIDAR – важный инструмент на пути реализации технологии.
Можно только поприветствовать такое намерение разнообразить наше будущее. А сканер LIDAR – важный инструмент на пути реализации технологии.
Смотрите также:
Решения для лидаров | Analog Devices
ADA4950-1/ADA4950-2 — это версии ADA4932-1/ADA4932-2 с выбираемым коэффициентом усиления, содержащие интегрированные резисторы обратной связи и установки усиления. Компоненты являются идеальным выбором для применения в качестве полностью дифференциального усилителя или усилителя с преобразованием несимметричного сигнала в дифференциальный в схемах входного интерфейса высокопроизводительных АЦП. Выходное синфазное напряжение может регулироваться пользователем при помощи внутреннего контура обратной связи по синфазному напряжению, для согласования выходного напряжения ADA4950-x с диапазоном входных напряжений АЦП. Внутренний контур обратной связи также обеспечивает превосходный баланс выходных сигналов и подавление продуктов гармонических искажений второго порядка.
Конфигурации с дифференциальным коэффициентом усиления, равным 1, 2 и 3, реализуются с помощью внутренних цепей обратной связи, которые подключаются внешними соединениями для задания коэффициента усиления схемы при замкнутом контуре.
ADA4950-1/ADA4950-2 производятся по патентованной компанией Analog Devices кремниево-германиевой (SiGe) технологии изготовления комплементарных биполярных транзисторов, позволяющей поддерживать очень низкие уровни искажений и шума при малой потребляемой мощности. Благодаря малому напряжению смещения и отличным динамическим характеристикам ADA4950-x хорошо подходят для разнообразных систем сбора данных и обработки сигналов.
ADA4950-x выпускаются в бессвинцовом 16-выводном корпусе LFCSP с габаритами 3 мм × 3 мм (ADA4950-1, одноканальный) или бессвинцовом 24-выводном корпусе LFCSP с габаритами 4 мм × 4 мм (ADA4950-2, двухканальный). Расположение выводов на корпусе оптимизировано для упрощения проектирования топологии печатной платы и минимизации искажений.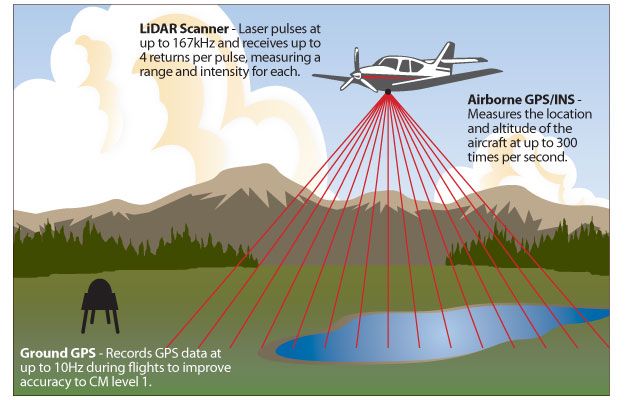 ADA4950-1/ADA4950-2 имеют рабочий температурный диапазон от −40°C до +105°C и работают с напряжениями питания от +3 В до ±5 В.
ADA4950-1/ADA4950-2 имеют рабочий температурный диапазон от −40°C до +105°C и работают с напряжениями питания от +3 В до ±5 В.
Области применения
- Драйверы АЦП
- Преобразователи несимметричного сигнала в дифференциальный
- Усилительные блоки каскадов ПЧ и основной полосы частот
- Дифференциальные буферы
- Драйверы линий передачи
Радиофизический комплекс: Высотный поляризационный лидар для зондирования атмосферы и Томская ионосферная станция «ЛИДАР-ИОНОЗОНД»
Лазерный метод измерения параметров атмосферы имеет исключительно важное значение в решении задач экологического мониторинга, динамики и физики атмосферы. Он аналогичен по своим принципам радиолокационному и относится к классу дистанционных, бесконтактных и оперативных методов. Использование волн оптического диапазона, естественно, приводит к совершенно иной методической и технологической основе измерений. Суть метода заключается в следующем. В атмосферу посылается узконаправленный пучок лазерного излучения с длительностью импульса в несколько наносекунд. Отраженное атмосферой в обратном направлении излучение (лидарный сигнал) воспринимается оптической приемной антенной и затем направляется на фотодетектор, преобразуется в электрический сигнал, оцифровывается и, затем, обрабатывается в ЭВМ. Изменяя состояние поляризации зондирующего излучения и, используя на входе приемной системы лидара поляриметр, измеряется матрица обратного рассеяния света (МОРС) исследуемых аэрозолей (размерность МОРС — 4х4). По виду матрицы обратного рассеяния и соотношению отдельных элементов можно определить тип аэрозольных частиц (сферические — несферические) и, более того, оценить степень преимущественной пространственной ориентации несферических частиц (например, кристаллических микрочастиц в облаках верхнего яруса).
Он аналогичен по своим принципам радиолокационному и относится к классу дистанционных, бесконтактных и оперативных методов. Использование волн оптического диапазона, естественно, приводит к совершенно иной методической и технологической основе измерений. Суть метода заключается в следующем. В атмосферу посылается узконаправленный пучок лазерного излучения с длительностью импульса в несколько наносекунд. Отраженное атмосферой в обратном направлении излучение (лидарный сигнал) воспринимается оптической приемной антенной и затем направляется на фотодетектор, преобразуется в электрический сигнал, оцифровывается и, затем, обрабатывается в ЭВМ. Изменяя состояние поляризации зондирующего излучения и, используя на входе приемной системы лидара поляриметр, измеряется матрица обратного рассеяния света (МОРС) исследуемых аэрозолей (размерность МОРС — 4х4). По виду матрицы обратного рассеяния и соотношению отдельных элементов можно определить тип аэрозольных частиц (сферические — несферические) и, более того, оценить степень преимущественной пространственной ориентации несферических частиц (например, кристаллических микрочастиц в облаках верхнего яруса). Основные технические параметры лидара. После завершения модернизации в приёмо-передающую часть лидара установлен лазер LS-2137U. При частоте повторения импульсов 10Гц и длительности 6-7 нс энергия излучения в импульсе на длине волны 532 нм составит 400мДж. Передатчик последовательно направляет в атмосферу излучение четырёх видов поляризации: три линейных с ориентацией плоскости поляризации 0, 45 и 90 угловых градусов относительно базиса и круговую поляризацию. Приемное устройство: три телескопа Кассегрена с диаметром зеркал 0,5 м; полоса пропускания интерференционных фильтров 1,2 нм с коэффициентом пропускания 60% в максимуме; фотодетектор — ФЭУ фирмы HAMAMATSU; в каждом канале установлен поляризационный анализатор, состоящий из фазовой пластинки и призмы Волластона. Система регистрации — счетчик одноэлектронных импульсов PMS-400A фирмы Becker and Hickl GmbH. Система сбора, обработки и документирования информации на базе персонального компьютера. Для изменения состояния поляризации лазерного излучения и поляризационного базиса приемника используются вращающиеся диски, в отверстия которых вмонтированы поляризационные элементы.
Основные технические параметры лидара. После завершения модернизации в приёмо-передающую часть лидара установлен лазер LS-2137U. При частоте повторения импульсов 10Гц и длительности 6-7 нс энергия излучения в импульсе на длине волны 532 нм составит 400мДж. Передатчик последовательно направляет в атмосферу излучение четырёх видов поляризации: три линейных с ориентацией плоскости поляризации 0, 45 и 90 угловых градусов относительно базиса и круговую поляризацию. Приемное устройство: три телескопа Кассегрена с диаметром зеркал 0,5 м; полоса пропускания интерференционных фильтров 1,2 нм с коэффициентом пропускания 60% в максимуме; фотодетектор — ФЭУ фирмы HAMAMATSU; в каждом канале установлен поляризационный анализатор, состоящий из фазовой пластинки и призмы Волластона. Система регистрации — счетчик одноэлектронных импульсов PMS-400A фирмы Becker and Hickl GmbH. Система сбора, обработки и документирования информации на базе персонального компьютера. Для изменения состояния поляризации лазерного излучения и поляризационного базиса приемника используются вращающиеся диски, в отверстия которых вмонтированы поляризационные элементы. Это позволяет существенно сократить общее время измерений и, тем самым, уменьшить погрешность, обусловленную изменчивостью измеряемых параметров в процессе зондирования. Время измерения вертикального профиля одного параметра Стокса сигнала обратного рассеяния (одно состояние поляризации зондирующего пучка) при частоте повторения зондирующих импульсов 10Гц составляет от 2 до 4 с. Пространственное разрешение при исследовании перистых облаков — 96 м (высота 8 -10 км), при зондировании стратосферного аэрозоля (высота 20-30 км) — 960 м. Относительная ошибка оценки эхо-сигнала — 3%. Время измерения поляризационной матрицы обратного рассеяния (16 элементов) достигает 1-3 минут на высотах порядка 30 км. Информация записывается в виде файлов в памяти компьютера. Для качественного анализа полученных результатов в ходе эксперимента, информация в виде высотных профилей параметров Стокса выводится на экран монитора.
Это позволяет существенно сократить общее время измерений и, тем самым, уменьшить погрешность, обусловленную изменчивостью измеряемых параметров в процессе зондирования. Время измерения вертикального профиля одного параметра Стокса сигнала обратного рассеяния (одно состояние поляризации зондирующего пучка) при частоте повторения зондирующих импульсов 10Гц составляет от 2 до 4 с. Пространственное разрешение при исследовании перистых облаков — 96 м (высота 8 -10 км), при зондировании стратосферного аэрозоля (высота 20-30 км) — 960 м. Относительная ошибка оценки эхо-сигнала — 3%. Время измерения поляризационной матрицы обратного рассеяния (16 элементов) достигает 1-3 минут на высотах порядка 30 км. Информация записывается в виде файлов в памяти компьютера. Для качественного анализа полученных результатов в ходе эксперимента, информация в виде высотных профилей параметров Стокса выводится на экран монитора.Главные преимущества, обоснование уникальности установки, в том числе сопоставление уну с существующими аналогами
Томская ионосферная станция имеет самый длинный ряд наблюдений в России (СССР) и включена Постановлением Правительства РФ в “Перечень уникальных экспериментальных установок национальной значимости”, исх. № НИ19-23/79 от 03.04.1995г. Миннауки РФ. Используются данные комплексного мониторинга, полученные авторами с 1994 г. по настоящее время. Они охватывают полный одиннадцатилетний период солнечной активности, что принципиально важно в этих исследованиях. Для дистанционной диагностики ионосферы используется единственный в Российской Федерации ионосферный радар «Диназонд 21». Работа станции осуществляется в автоматическом режиме с удаленным доступом через Интернет. Уникальная база данных, полученная за весь период наблюдений на Томской ионосферной станции, представляет собой на настоящем этапе временные ряды ионосферных параметров регулярных и спорадических ионосферных слоёв за период 1936-2007 гг. Ее общий объем на сегодняшний день составляет 5 Гб. Для изучения физических полей природной окружающей среды используются уникальные аппаратно-измерительные комплексы мониторинговых измерений характеристик электромагнитных излучений, инфразвукового фона окружающей среды и автоматизированная метеорологическая станция.
№ НИ19-23/79 от 03.04.1995г. Миннауки РФ. Используются данные комплексного мониторинга, полученные авторами с 1994 г. по настоящее время. Они охватывают полный одиннадцатилетний период солнечной активности, что принципиально важно в этих исследованиях. Для дистанционной диагностики ионосферы используется единственный в Российской Федерации ионосферный радар «Диназонд 21». Работа станции осуществляется в автоматическом режиме с удаленным доступом через Интернет. Уникальная база данных, полученная за весь период наблюдений на Томской ионосферной станции, представляет собой на настоящем этапе временные ряды ионосферных параметров регулярных и спорадических ионосферных слоёв за период 1936-2007 гг. Ее общий объем на сегодняшний день составляет 5 Гб. Для изучения физических полей природной окружающей среды используются уникальные аппаратно-измерительные комплексы мониторинговых измерений характеристик электромагнитных излучений, инфразвукового фона окружающей среды и автоматизированная метеорологическая станция. Уникальный аппаратно-измерительный комплекс мониторинговых измерений характеристик электромагнитных излучений окружающей среды позволяет получать спектральные характеристики в КНЧ диапазоне (от 0.01 до 40 Гц), в диапазоне гармоник промышленной частоты (от 5 Гц до 1 кГц), КНЧ-модуляции в ВЧ сигналах, проходящих через ионосферный канал связи, а также проводить измерения уровня электромагнитного фона в НЧ, СЧ, ВЧ и УВЧ диапазонах (от 30 кГц до 60 МГц) и вариаций трех компонент (вертикальной, восточной и северной) геомагнитного поля. Этот комплекс работает в автоматическом режиме с удаленным доступом через Интернет и имеет данные непрерывного мониторинга, которые представлены в электронном виде с 1994 г. по настоящее время. Уникальный измерительно-вычислительный комплекс инфразвукового фона имеет три разнесенных в пространстве датчика регистрации вариаций атмосферного давления и позволяет получать спектральные характеристики инфразвукового фона окружающей среды в диапазоне частот от 0.01 до 40Гц.
Уникальный аппаратно-измерительный комплекс мониторинговых измерений характеристик электромагнитных излучений окружающей среды позволяет получать спектральные характеристики в КНЧ диапазоне (от 0.01 до 40 Гц), в диапазоне гармоник промышленной частоты (от 5 Гц до 1 кГц), КНЧ-модуляции в ВЧ сигналах, проходящих через ионосферный канал связи, а также проводить измерения уровня электромагнитного фона в НЧ, СЧ, ВЧ и УВЧ диапазонах (от 30 кГц до 60 МГц) и вариаций трех компонент (вертикальной, восточной и северной) геомагнитного поля. Этот комплекс работает в автоматическом режиме с удаленным доступом через Интернет и имеет данные непрерывного мониторинга, которые представлены в электронном виде с 1994 г. по настоящее время. Уникальный измерительно-вычислительный комплекс инфразвукового фона имеет три разнесенных в пространстве датчика регистрации вариаций атмосферного давления и позволяет получать спектральные характеристики инфразвукового фона окружающей среды в диапазоне частот от 0.01 до 40Гц. В 2010 г. комплекс был модернизирован и дооснащен тремя пространственно разнесенными микробарометрами «ISGM03» которые позволяют получать спектральные характеристики инфразвукового фона окружающей среды в диапазоне частот от 0.02 до 4 Гц. Этот комплекс работает в автоматическом режиме с удаленным доступом через Интернет и имеет данные непрерывного мониторинга, которые представлены в электронном виде с 1997 г. по настоящее время. Автоматизированная метеорологическая станция по регистрации атмосферного давления, температуры и относительной влажности воздуха, скорости и направления ветра имеет данные непрерывного мониторинга, которые представлены в электронном виде с 2000 г. по настоящее время. Практика зарубежных исследований основывается на использовании линейно поляризованного зондирующего излучения и приёме двух ортогонально поляризованных компонент лидарного сигнала, что, естественно, не позволяет определить полную МОРС. Высотный поляризационный лидар Томского государственного университета, разработанный совместно с Институтом оптики атмосферы СО РАН, по своим техническим характеристикам относится к уникальным экспериментальным установкам мировой значимости.
В 2010 г. комплекс был модернизирован и дооснащен тремя пространственно разнесенными микробарометрами «ISGM03» которые позволяют получать спектральные характеристики инфразвукового фона окружающей среды в диапазоне частот от 0.02 до 4 Гц. Этот комплекс работает в автоматическом режиме с удаленным доступом через Интернет и имеет данные непрерывного мониторинга, которые представлены в электронном виде с 1997 г. по настоящее время. Автоматизированная метеорологическая станция по регистрации атмосферного давления, температуры и относительной влажности воздуха, скорости и направления ветра имеет данные непрерывного мониторинга, которые представлены в электронном виде с 2000 г. по настоящее время. Практика зарубежных исследований основывается на использовании линейно поляризованного зондирующего излучения и приёме двух ортогонально поляризованных компонент лидарного сигнала, что, естественно, не позволяет определить полную МОРС. Высотный поляризационный лидар Томского государственного университета, разработанный совместно с Институтом оптики атмосферы СО РАН, по своим техническим характеристикам относится к уникальным экспериментальным установкам мировой значимости. Он измеряет высотные профили всех элементов МОРС атмосферного аэрозоля (включая облачный) и, тем самым, позволяет изучать процессы, о которых ранее информация была весьма ограничена, в силу отсутствия технических средств для её получения. Высотный поляризационный лидар для зондирования атмосферы, внесён в «Перечень уникальных экспериментальных установок национальной значимости» (Unique Research Facilities in Russia. -Paris: Organ. for Economic Co-Operation and Development. 1995. p.161-164). Информация о лидаре содержится в международном каталоге, изданном в США в 1993 году (Тhird International lidar Researchers Direktory.Compiled by M.P. Cormick Atmosph. Sci. Division, NASA Langley Reserch Center (1993) p.71), что свидетельствует о включёнии лидара в мировую сеть станций лазерного зондирования атмосферы.
Он измеряет высотные профили всех элементов МОРС атмосферного аэрозоля (включая облачный) и, тем самым, позволяет изучать процессы, о которых ранее информация была весьма ограничена, в силу отсутствия технических средств для её получения. Высотный поляризационный лидар для зондирования атмосферы, внесён в «Перечень уникальных экспериментальных установок национальной значимости» (Unique Research Facilities in Russia. -Paris: Organ. for Economic Co-Operation and Development. 1995. p.161-164). Информация о лидаре содержится в международном каталоге, изданном в США в 1993 году (Тhird International lidar Researchers Direktory.Compiled by M.P. Cormick Atmosph. Sci. Division, NASA Langley Reserch Center (1993) p.71), что свидетельствует о включёнии лидара в мировую сеть станций лазерного зондирования атмосферы.Основные направления научных исследований, проводимых с использованием УНУ:
- мониторинг ионосферных параметров, содержания аэрозоля в тропосфере и стратосфере, спектральных характеристик электромагнитного фона, метеорологических параметров, параметров геомагнитного поля и характеристик психофизиологического состояния организма человека в синхронном (параллельном) режиме непрерывных измерений по разработанной методике на уникальных установках, дополненных целым рядом измерительно-вычислительных комплексов;
- установление степени и условий сопряженности (корреляции) между характеристиками электромагнитных полей, формируемых околоземными резонаторами Шумана и Альвена в контролируемых геофизических условиях при различных солнечных событиях и характеристиками состояния сердечно-сосудистой системы, активностью головного мозга человека;
- построение математических моделей и проведение на них численных экспериментов, позволяющих проследить всю цепь взаимосвязанных событий в системе: солнечные события – ионосфера – околоземные резонаторы – атмосфера – электромагнитные поля – организм человека и дать физическую интерпретацию результатов анализа экспериментальных данных с оценкой эффективности механизмов солнечно-земных связей;
- исследование влияния внешних физических полей на ориентацию кристаллов пластинчатой и столбчатой форм в перистых облаках;
- исследование влияния пульсаций скорости ветра на характер ориентации в перистых облаках кристаллических частиц различных размеров и сравнение результатов этих исследований с теоретическими моделями авторов проекта и других авторов;
- исследования волновых процессов в атмосфере, стратосферного аэрозоля и озона и влияния солнечного ветра на характеристики светорассеивающих слоев в средней атмосфере северного полушария;
- исследование процессов поступления аэрозолей в среднюю атмосферу вследствие крупных природных и техногенных катастроф и разработка технологии контроля трансграничных переносов аэрозольных загрязнений на высотах, включающих тропосферу и нижнюю стратосферу.

Наиболее значимые научные результаты исследований
С помощью высотного поляризационного лидара впервые инструментально определены параметры ориентации кристаллов льда в облаках и обнаружены в нижней стратосфере частицы аэрозоля, отличающихся по микроструктуре от фонового. По возможности измерения полной поляризационной матрицы обратного рассеяния лидар является уникальным, единственным в мире. Поскольку матрица рассеяния несет исчерпывающую информацию о состоянии аэрозольного ансамбля, то, наблюдая изменение элементов матрицы во времени и пространстве, можно получать данные не только о микроструктуре аэрозоля на конкретной высоте, но и давать оценку параметров внешних физических полей. Систематические ряды наблюдений за аэрозолем в верхних слоях атмосферы позволяют своевременно обнаружить появление над точкой стояния лидара аэрозолей другого типа, что однозначно связывается с циркуляцией атмосферы и трансрегиональными переносами воздушных масс. Если учесть, что прямые исследования стратосферного аэрозоля крайне затруднены (подъем контактных приборов возможен только на специальных аэростатах или высотных самолетах), то использование высотного поляризационного лидара для систематических наблюдений за состоянием атмосферы на высотах до 30 км. экономически оправдано. Результаты экспериментов на установке Лидар в настоящее время имеют мировой приоритет в плане получения информации об ориентации кристаллических частиц в облаках верхнего яруса. Дело в том, что в программах расчета радиационного баланса атмосферы широко используются оптические модели, в которых не учитывается свойство ориентированности несферических облачных частиц, например, кристаллов льда в перистых облаках. По этой причине используется модель, в лучшем случае, предполагающая хаотическую ориентацию частиц, что ведет к уменьшению точности расчетов. Совершенствование оптической модели облаков верхнего яруса крайне важно для понимания ключевых проблем глобальных изменений климата на планете. Систематические измерения высотных профилей МОРС в верхних слоях атмосферы позволяют отработать технологию контроля трансрегионального переноса аэрозольных загрязнений атмосферы, что очень важно в свете подписания Россией Киотского протокола.
экономически оправдано. Результаты экспериментов на установке Лидар в настоящее время имеют мировой приоритет в плане получения информации об ориентации кристаллических частиц в облаках верхнего яруса. Дело в том, что в программах расчета радиационного баланса атмосферы широко используются оптические модели, в которых не учитывается свойство ориентированности несферических облачных частиц, например, кристаллов льда в перистых облаках. По этой причине используется модель, в лучшем случае, предполагающая хаотическую ориентацию частиц, что ведет к уменьшению точности расчетов. Совершенствование оптической модели облаков верхнего яруса крайне важно для понимания ключевых проблем глобальных изменений климата на планете. Систематические измерения высотных профилей МОРС в верхних слоях атмосферы позволяют отработать технологию контроля трансрегионального переноса аэрозольных загрязнений атмосферы, что очень важно в свете подписания Россией Киотского протокола. Наиболее значимые научные результаты исследований:
- Реализована математическая модель среднеширотной ионосферы с возможностью наблюдения эффектов солнечных затмений, для практически любого солнечного затмения. Полученные результаты представляют интерес для развития методов и аппаратуры дистанционного зондирования атмосферы, а также для углубления знаний о микроструктуре облаков верхнего яруса, об ионосфере Земли и процессах протекающих в них.
- Описаны гибридная модель трендов, спектральное оценивание на основе метода максимальной энтропии и алгоритм оценки комплексного спектра максимума энтропии.
- Построены модели, определяющие особенности проявления событий на Солнце в состоянии показателей физической среды обитания, которые определяются, согласно разрабатываемой концепции, процессами в ионосферных резонаторах, в первую очередь в резонаторе «Земля — Ионосфера» (шумановском резонаторе). Получена эмпирическая модель, позволяющая с вероятностью 70 % рассчитать частоты первых трех мод шумановского резонатора для каждого заданного часа любого месяца.
- Численно реализована модель среднеширотной ионосферы с возможностью наблюдения эффектов солнечных затмений. Различия модельных и экспериментальных данных для рассмотренных данных не превысили 20 %.
- Разработаны эмпирические модели, отражающие особенности влияния вариаций электромагнитных полей и ряда других экологических факторов на функциональное состояние основных регуляторных систем организма человека. При исследовании действия комплекса величин температуры, давления, влажности, скорости ветра и магнитной возмущенности и других на период сердечных сокращений, в результате применения регрессионного анализа, из расчетов можно сделать вывод, что параметры окружающей среды оказывают значительное влияние. В реализованной эмпирической модели общий коэффициент детерминации для среднего периода сердечных сокращений равен 26 %, а для дисперсии 20 %.
- Эмпирическая модель, описывающая сезонные и суточные изменения спектральных характеристик шумановских резонансов в зависимости от гелио -геофизичесиких условий.
- Построена эмпирическая модель спектральных характеристик шумановских резонансов за период непрерывного мониторинга в течение последних 12 лет. Выявлены основные эмпирические зависимости частот, амплитуд и добротностей первых четырех мод шумановских резонансов.
- По экспериментальным данным построена регрессионная модель спектральных характеристик электромагнитного фона в полосе частот альвеновских резонансов, описывающая влияние 11-ти летнего цикла солнечной активности, на долю которого приходится порядка 15 % вариаций резонансных частот.
- Разработана физико-математическая модель ионосферы с включением околоземных глобальных резонансов Шумана и формированием электромагнитного фона КНЧ–диапазона окружающей среды.
- На основе феноменологического подхода в рамках теории переноса электромагнитного излучения обоснована и сформулирована физико-математическая модель пространственно-временного распределения плотности потока мощности радиоизлучения СЧ и ВЧ–диапазонов.
- Разработана физико-математическая модель пространственно-временного распределения спектральных характеристик шумановских резонансов.
- Построена регрессионная модель зависимости уровня инфразвукового фона от метеорологических величин: атмосферного давления, температуры, влажности и скорости ветра.
- Разработаны методические основы и алгоритмы статистического анализа для поиска климатических трендов. Сделан выбор модели трендов. Описаны гибридная модель трендов, спектральное оценивание на основе метода максимальной энтропии и алгоритм оценки комплексного спектра максимума энтропии.
- Проведена оценка комплексного спектра максимума энтропии гармонического колебания и прогнозирование солнечной активности на основе оценок комплексного спектра максимума энтропии. Изложен алгоритм ангармонического спектрального разложения.
- Проведена оценка комплексного спектра максимума энтропии гармонического колебания и прогнозирование солнечной активности на основе оценок комплексного спектра максимума энтропии.
- Разработан алгоритм ангармонического спектрального разложения.
- Разработана методика измерения элементов матрицы обратного рассеяния света облаков верхнего яруса в светлое время суток, которая основана на подавлении мощного сигнала обратного рассеяния из «ближней зоны» лидара с помощью электрооптического затвора и одновременном увеличении энергии зондирующих импульсов. Экспериментально показано, что для измерений совокупности 16 профилей интенсивности рассеянного назад излучения фотоэлектронным умножителем, работающем в режиме счёта фотонов, необходимо произвести накопление, не менее чем, по 200 импульсам лазера при частоте следования импульсов 10 Гц.
 Полученные результаты представляют интерес для развития методов и аппаратуры дистанционного зондирования атмосферы, а также для углубления знаний о микроструктуре облаков верхнего яруса, об ионосфере Земли и процессах протекающих в них.
Полученные результаты представляют интерес для развития методов и аппаратуры дистанционного зондирования атмосферы, а также для углубления знаний о микроструктуре облаков верхнего яруса, об ионосфере Земли и процессах протекающих в них. 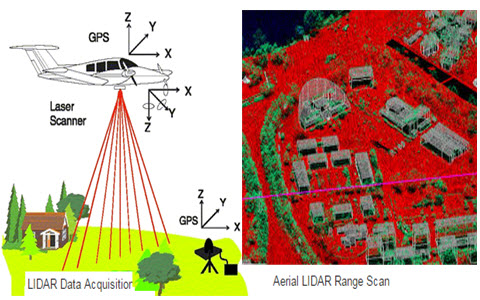
 Экспериментально показано, что для измерений совокупности 16 профилей интенсивности рассеянного назад излучения фотоэлектронным умножителем, работающем в режиме счёта фотонов, необходимо произвести накопление, не менее чем, по 200 импульсам лазера при частоте следования импульсов 10 Гц.
Экспериментально показано, что для измерений совокупности 16 профилей интенсивности рассеянного назад излучения фотоэлектронным умножителем, работающем в режиме счёта фотонов, необходимо произвести накопление, не менее чем, по 200 импульсам лазера при частоте следования импульсов 10 Гц.Контакты:
634050, г. Томск, пр. Ленина, д. 36Самохвалов Игнатий Викторович
т.(3822)413984
e-mail: [email protected] Колесник Сергей Анатольевич
т.(3822)412797
e-mail: [email protected]
Теперь доступно LiDAR-устройство размером с палец
Предоставлено: Пхоханский университет науки и технологий (POSTECH).Технология LiDAR на основе нанофотоники, разработанная исследовательской группой POSTECH, была представлена в качестве приглашенного доклада в Nature Nanotechnology, ведущем академическом журнале в области нанонауки и наноинженерии.
В этой статье исследовательская группа POSTECH (возглавляемая профессором Джунсук Ро из кафедр машиностроения и химического машиностроения, докторант д-р. Инки Ким с кафедры машиностроения и доктор философии. кандидат Jaehyuck Jang из Департамента химической инженерии) в сотрудничестве с Французским национальным научным институтом (CNRS-CRHEA) сосредоточился на устройстве LiDAR, разработанном путем изучения сверхлегкой нанофотоники на основе метаматериалов.
Инки Ким с кафедры машиностроения и доктор философии. кандидат Jaehyuck Jang из Департамента химической инженерии) в сотрудничестве с Французским национальным научным институтом (CNRS-CRHEA) сосредоточился на устройстве LiDAR, разработанном путем изучения сверхлегкой нанофотоники на основе метаматериалов.
Кроме того, в документе представлены основные нанофотонные технологии, такие как метод сканирования луча на основе материала с фазовым переходом, LiDAR-вспышка, который не требует сканирования луча с помощью устройства генерации облака точек, а также интеграция и масштабирование устройства с источником света. методы изготовления.
В частности, в документе объясняется, что сверхточное устройство LiDAR, разработанное исследовательской группой, может применяться не только к автономным транспортным средствам, но и к интеллектуальным роботам, дронам, трехмерным панорамным камерам, системам видеонаблюдения и платформам дополненной реальности. Технология LiDAR собирает информацию о глубине объекта путем облучения лазерным лучом объекта и измерения времени его возвращения. Датчики LiDAR привлекают внимание в области будущих дисплеев от оборудования, такого как автономные транспортные средства, роботы с искусственным интеллектом и беспилотные летательные аппараты, для установки на iPhone для трехмерного распознавания лиц или использования в безопасных платежных системах.
Датчики LiDAR привлекают внимание в области будущих дисплеев от оборудования, такого как автономные транспортные средства, роботы с искусственным интеллектом и беспилотные летательные аппараты, для установки на iPhone для трехмерного распознавания лиц или использования в безопасных платежных системах.
В настоящее время высококлассная механическая система LiDAR на крыше автономных транспортных средств размером примерно с два взрослых кулака, сложенных вместе, и стоит десятки тысяч долларов. Кроме того, еще предстоит преодолеть множество проблем, таких как процесс зарядки, требующий огромного количества энергии, и управление тепловыделением.
В качестве решения этой проблемы группа исследователей предложила сверхкомпактную технологию LiDAR, основанную на нанофотонике.Исследователи объясняют, как эта нанофотонная технология может усовершенствовать сенсорную систему LiDAR в различных аспектах, от основных принципов измерения LiDAR до новейших сверхбыстрых и сверхточных методов нанофотонного измерения и нанофотонных устройств, таких как метаповерхности, солитонные микрогребни и оптические волноводы.
«В настоящее время исследовательская группа проводит несколько дополнительных исследований по разработке сверхлегких составных LiDAR-систем на основе метаповерхностей», — отметил профессор Джунсук Ро.«Если это исследование окажется успешным, мы можем рассчитывать на производство доступных сверхбыстрых и сверхточных систем LiDAR по доступной цене».
Инженеры тестируют систему LiDAR, предназначенную для космических полетов
Дополнительная информация: Инки Ким и др., Нанофотоника для технологии обнаружения света и дальности, Nature Nanotechnology (2021).DOI: 10.1038 / s41565-021-00895-3
Предоставлено Пхоханский университет науки и технологий (POSTECH)
Ссылка :
Устройство LiDAR размером с палец уже доступно (17 мая 2021 г. )
получено 14 августа 2021 г.
с https: // физ.org / news / 2021-05-lidar-device-size-finger.html
)
получено 14 августа 2021 г.
с https: // физ.org / news / 2021-05-lidar-device-size-finger.html
Этот документ защищен авторским правом. За исключением честных сделок с целью частного изучения или исследования, никакие часть может быть воспроизведена без письменного разрешения. Контент предоставляется только в информационных целях.
3D-датчиков LiDAR | Датчики SICK
3D LiDAR | БОЛЬНОЙ Датчики 3D LiDAR (в том числе и лазерные 3D сканеры) обнаруживают окружающую среду практически без зазоров, независимо от того, движутся объекты или нет.Вот почему датчики 3D LiDAR идеально подходят для таких задач, как защита от столкновений на автоматизированных транспортных средствах или сканирование объектов.
Фильтр
Фильтровать по:
Приложение— В помещении (1) Открытый (3)
Применить фильтр
4 результатов:
Вид: Просмотр галереи Посмотреть список- Четыре слоя распределения и угол апертуры 275 °
- Высокая атмосферостойкость и надежность благодаря HDDM + с технологией мультиэха
- Оценка поля и данные измерений в одном датчике
- Простая конфигурация с возможностью адаптации к изменяющаяся среда
- Удобная и удобная для пользователя диагностика через веб-сервер
- Обнаружение без зазоров по 24 слоям сканирования при угле апертуры 120 °
- Точное угловое разрешение с высокой плотностью точек сканирования
- Надежность благодаря технологии мультиэхо
- Удобный и удобный интерфейс веб-сервера для настройки
- Вывод точных данных измерений через телеграммы и цифровые выходы
- Интуитивно понятный пользовательский интерфейс для представления и настройки приложения
- Большой угол раскрытия и четыре уровня MRS1000
- Обнаружение контура плеча-головы-плеча
- Предварительно запрограммированное приложение — специальное приложение на основе датчика 3D LiDAR
- Одновременные измерения до 8 плоскостей сканирования
- Защита от атмосферных воздействий благодаря технологии мульти-эхо и класс защиты IP69K
- Легкий, компактный дизайн: прибл. 0,77 кг / 1 кг
- Широкий температурный диапазон: от –40 ° C до +70 ° C
- Низкое энергопотребление: 8 Вт
- Доступны различные угловые разрешения в диапазоне сканирования
- Встроенное отслеживание объекта
 0,77 кг / 1 кг
0,77 кг / 1 кгПодождите …
Ваш запрос обрабатывается и может занять несколько секунд.
Лидарраньше стоил 75 000 долларов — вот как Apple привнесла его в iPhone
.На презентации iPhone 12 во вторник Apple рассказала о возможностях своего нового лидарного сенсора.Apple заявляет, что лидар улучшит камеру iPhone, позволив более быструю фокусировку, особенно в условиях низкой освещенности. И это может позволить создать новое поколение сложных приложений дополненной реальности.
На презентации во вторник было мало подробностей о том, как на самом деле работает лидар iPhone, но это не первое устройство Apple с лидаром. Apple впервые представила эту технологию в обновленном iPad в марте. И хотя никто еще не разбирал iPhone 12, мы можем многому научиться из недавних разборок iPad.
И хотя никто еще не разбирал iPhone 12, мы можем многому научиться из недавних разборок iPad.
работает, посылая лазерный свет и измеряя, сколько времени нужно, чтобы прийти в норму. Поскольку свет распространяется с постоянной скоростью, время прохождения туда и обратно можно перевести в точную оценку расстояния. Повторите этот процесс для двухмерной сетки, и в результате получится трехмерное «облако точек», показывающее расположение объектов в комнате, на улице или в другом месте.
Июньский анализ, проведенный компанией System Plus Consulting, показал, что лидар iPad излучает свет с помощью массива лазеров с вертикальным резонатором, излучающих поверхность (VCSEL), производства Lumentum.Затем он обнаруживает обратную вспышку с помощью набора датчиков, называемых однофотонными лавинными диодами (SPAD), поставляемых Sony. Я объясню, что это такое, в следующем разделе.
Я нашел объявление Apple особенно интересным, потому что я работал над историей о компаниях, которые используют одну и ту же комбинацию технологий — лазеры VCSEL и детекторы SPAD — для создания гораздо более мощных лидаров для автомобильного рынка. Одним из главных преимуществ VCSEL и SPAD является то, что они могут быть созданы с использованием обычных методов изготовления полупроводников.В результате они получают огромную экономию от масштаба в полупроводниковой промышленности. Поскольку датчики на основе VCSEL становятся все более распространенными, они, вероятно, будут постоянно становиться дешевле и лучше.
Одним из главных преимуществ VCSEL и SPAD является то, что они могут быть созданы с использованием обычных методов изготовления полупроводников.В результате они получают огромную экономию от масштаба в полупроводниковой промышленности. Поскольку датчики на основе VCSEL становятся все более распространенными, они, вероятно, будут постоянно становиться дешевле и лучше.
Две компании, работающие над лидаром высокого класса на основе VCSEL — Ouster и Ibeo — уже получили больше поддержки, чем большинство компаний в многолюдном лидарном бизнесе. Решение Apple внедрить эту технологию — и возможность того, что другие производители смартфонов последуют примеру Apple — обеспечит им хороший попутный ветер в ближайшие годы.
VCSEL помогли Apple радикально упростить лидар
Enlarge / Velodyne была пионером лидаров, выпустив первые 64-лазерные лидары. Первый трехмерный лидарный датчик был представлен Velodyne более десяти лет назад. Прядильное устройство стоило около 75000 долларов и было значительно больше смартфона. Apple нужно было сделать лидарные датчики радикально дешевле и меньше, чтобы устанавливать по одному в каждый iPhone, и VCSEL помогли компании в этом.
Apple нужно было сделать лидарные датчики радикально дешевле и меньше, чтобы устанавливать по одному в каждый iPhone, и VCSEL помогли компании в этом.
Что такое VCSEL? Если вы создаете лазер с использованием обычных методов изготовления полупроводников, у вас есть два основных варианта.Вы можете сделать лазер, который излучает свет со стороны пластины (известный как лазер с торцевым излучением) или сверху (лазер, излучающий поверхность с вертикальной полостью, или VCSEL).
Традиционно лазеры с торцевым излучением были более мощными. VCSEL десятилетиями использовались во всем, от оптических мышей до оптических сетевых устройств. Они традиционно считались непригодными для высокопроизводительных приложений, где требовалось много света, но по мере развития технологии VCSEL стали более мощными.
Для изготовления лазера с торцевым излучением обычно требуется разрезать пластину, чтобы обнажить излучатель. Это увеличивает стоимость и сложность производственного процесса и ограничивает количество лазеров, которые могут быть изготовлены на одной пластине. В отличие от этого, светодиоды VCSEL излучают свет перпендикулярно пластине, поэтому их не нужно разрезать или упаковывать по отдельности. Это означает, что один кремниевый чип может содержать десятки, сотни или даже тысячи VCSEL. В принципе, микросхема с тысячами VCSEL не должна стоить больше нескольких долларов при крупномасштабном производстве.Реклама
То же самое и с однофотонными лавинными диодами. Как следует из названия, они достаточно чувствительны, чтобы обнаружить одиночный фотон. Высокая чувствительность означает, что они страдают от сильного шума. В результате требуется сложная постобработка, чтобы использовать их в таких приложениях, как лидар. Но одним большим преимуществом SPAD является то, что, как и VCSEL, они могут быть изготовлены с использованием обычных полупроводниковых технологий, и тысячи из них могут быть размещены на одном кристалле.
Комбинация VCSEL и SPAD позволяет значительно упростить традиционные конструкции лидара. Оригинальный трехмерный лидар Velodyne установил 64 индивидуально упакованных лазера в колонну на вращающемся подвесе. У каждого лазера был соответствующий детектор. Сложность этой конструкции и необходимость точной юстировки каждого лазера с соответствующим детектором были одной из причин, по которой первые лидарные устройства Velodyne были такими дорогими.
Совсем недавно ряд компаний экспериментировали с использованием небольших зеркал для «направления» лазерного луча в шаблоне сканирования.Эта конструкция требует только одного лазера вместо 64. Но все же в ней задействована по крайней мере одна движущаяся часть.
Напротив, Apple, Ouster и Ibeo создают лидарные датчики вообще без движущихся частей. С сотнями или тысячами лазеров на чипе лидары на основе VCSEL могут иметь специальный лазер для каждой точки в поле зрения лидара. А поскольку все эти лазеры поставляются предварительно упакованными на одном чипе, сборка намного проще, чем у классической прядильной конструкции Velodyne.
В последних iPhone уже был еще один трехмерный датчик, называемый камерой TrueDepth, который включал функцию Apple FaceID.Он также использовал массив VCSEL, как сообщается, предоставленный Lumentum. TrueDepth работает, проецируя сетку из более чем 30 000 точек на лицо объекта, а затем оценивает трехмерную форму лица пользователя на основе способа деформации сетки.
Лидарный сенсор iPad проецирует намного меньше лазерных точек, чем камера TrueDepth. Видео iFixIt, снятое с помощью инфракрасной камеры, показало, что лидар проецирует сетку всего в несколько сотен пикселей. Но в то время как шаблон TrueDepth пытается угадать глубину на основе формы света, падающего на лицо объекта, датчик лидара iPad измеряет расстояния напрямую, измеряя, сколько времени требуется свету, чтобы отразиться от объекта и вернуться в камеру.Этот процесс, вероятно, дает как лучшую точность измерения глубины, так и большую дальность действия.
Более мощный лидар также использует VCSEL и SPAD
Датчики вращения Enlarge / Ouster.Ouster
По своим характеристикам лидар Apple намного отстает от высококлассных датчиков, продаваемых специализированными лидарными компаниями. Velodyne, компания, которая изобрела трехмерный лидар, рекламирует диапазон более 200 метров для своего самого мощного лидара, в то время как датчик Apple имеет диапазон около пяти метров.
Другие лидары на основе VCSEL также значительно мощнее, чем у Apple. Например, самый мощный лидар Ouster на основе VCSEL может похвастаться дальностью около 100 метров для обнаружения объектов с 10-процентной отражательной способностью.
Датчики токаOuster представляют собой прядильные блоки Velodyne. У них есть от 16 до 128 модулей VCSEL подряд на одном чипе — этот чип затем устанавливается вертикально на вращающийся стабилизатор, как и устройства Velodyne. Простота этой твердотельной конструкции позволила Ouster уступить Velodyne по цене и стать одним из главных конкурентов Velodyne.Но эти вращающиеся лидарные датчики от Ouster по-прежнему стоят тысячи долларов — слишком дорого для использования в обычных автомобилях, не говоря уже о смартфонах.
На прошлой неделе Ouster объявил о планах выпустить новый твердотельный лидар без движущихся частей. Вместо того, чтобы располагать в ряд от 16 до 128 лазеров, как в нынешнем лидаре Оустера, новый блок Оустера будет иметь более 20 000 VCSEL, расположенных в двухмерной сетке.
Ibeo придерживается аналогичной стратегии и может опередить Ouster. Компания Ibeo разработала самый первый лидар, когда-либо поставлявшийся на массовый рынок, — Audi A8.Этот лидар был примитивным, с разрешением всего четыре линии по вертикали. Но сейчас Ibeo разрабатывает новую модель под названием ibeoNext, которая будет иметь лазерную сетку размером 128 на 80 пикселей — немного меньше, чем запланированный датчик Ouster, но значительно больше, чем предыдущие предложения Ibeo. Ibeo заявляет, что ее датчик будет иметь диапазон 150 метров для объектов с 10-процентной отражательной способностью.
Последний претендент, о котором стоит упомянуть, — это Sense Photonics, о которой мы рассказывали еще в январе. Как и другие компании, которые мы обсуждали, Sense использует VCSEL и SPAD для своего лидара.Тем не менее, Sense использует технику, называемую микротрансферной печатью, для распространения своих лазеров. Это позволяет лазерам потреблять больше энергии, не создавая проблем с температурой и безопасностью для глаз. До сих пор лидары Sense не имели большой дальности, но генеральный директор Sense Шона Макинтайр сообщила Ars, что компания стремится к 200-метровой дальности для будущего датчика, о котором она объявит в начале 2021 года.
Лидар собирается завоевать автомобильный рынок
Увеличить / Лидар IbeoNext.Ibeo
Ibeo, Sense и Ouster внедряют новые недорогие конструкции, поскольку ожидают резкого роста спроса со стороны автомобильной промышленности.Лидарные датчики могут значительно улучшить передовые системы помощи водителю транспортных средств (ADAS).
Например, многие люди видят в Tesla одну из самых передовых систем ADAS в отрасли. Но у компании есть постоянная проблема с ее транспортными средствами, которые врезаются в стационарные объекты — иногда со смертельным исходом. Лидар лучше, чем камеры или радар, при обнаружении неподвижных объектов, поэтому добавление лидара к автомобилям может предотвратить многие из этих аварий, делая системы ADAS более удобными для водителей.
До сих пор лидар считался слишком дорогим для автомобильного рынка, но ситуация начала меняться, и несколько компаний обещали лидарные датчики, которые в ближайшие несколько лет будут стоить менее 1000 долларов.
Ouster планирует подготовить свой датчик ES2 для массового производства автомобилей к 2024 году. Компания заявляет, что первоначально его объем будет стоить 600 долларов, а в последующие годы цена упадет до 100 долларов.
Ibeo не объявила цену на IbeoNext, но компания заявляет, что уже заключила сделку с Great Wall Motors, крупным автопроизводителем в Китае, о начале серийного производства в 2022 году.
Компании, не использующие лидары VCSEL, также устремились на этот рынок. Одна из самых известных — Luminar, которая в мае объявила о сделке с Volvo. Volvo планирует выпустить автомобили с лидаром Luminar в 2022 году.
Эти конструкции имеют разные сильные и слабые стороны. Пока что лидар Luminar может похвастаться большей дальностью — целых 250 метров. Это возможно, потому что Luminar использует лазеры с длиной волны 1550 нм — далеко за пределами диапазона видимого света. Жидкость в человеческом глазу непрозрачна для света 1550 нм, а это означает, что лидар Luminar может использовать гораздо большую мощность лазера, не создавая опасности для глаз.Лидар Luminar также предлагает более широкое поле зрения, чем у Ouster. Реклама
Самый большой вопрос для Luminar заключается в том, сможет ли он достичь своей целевой цены в 1000 долларов. Когда я два года назад брал интервью у генерального директора Luminar Остина Рассела, он сказал, что Luminar нужно будет «снизить уровень однозначных тысяч», чтобы выйти на массовый рынок. Я предположил, что это означало, что в то время лидар Luminar стоил больше, чем «низкие однозначные тысячи». Но теперь Luminar заявляет, что в ближайшие несколько лет цена упадет ниже 1000 долларов.
В отличие от этого, Ouster и Ibeo не должны иметь особых проблем с тем, чтобы сделать свой лидар дешевым. Большая проблема, вероятно, будет заключаться в достижении диапазона 200 метров, который обычно считается необходимым для автономной работы на скоростях шоссе.
«VCSEL — не очень яркий лазер по сравнению с традиционным лидаром, — сказал мне генеральный директор Ouster Ангус Пакала в 2018 году. — Если вы создадите физическую модель и подключите массив SPAD и массив VCSEL, вы получите действительно низкую производительность. » Однако, по словам Пакала, Оустер придумал «некоторые фундаментальные ИС на разных уровнях», чтобы комбинация работала.Пакала сказал, что это включает в себя «исключительное» подавление внеполосного света и «размещение огромного объема обработки сигналов непосредственно рядом с SPAD», чтобы помочь отличить отраженные лазерные вспышки от окружающего шума.
Таким образом, большая проблема, с которой Ouster, Ibeo и Sense столкнутся в ближайшие пару лет, — это повысить производительность комбинации VCSEL и SPAD настолько, чтобы достичь той же дальности 200 метров, которую рекламируют другие лидары. Если они смогут это сделать, то низкая стоимость и простота полупроводниковых чипов могут дать им решающее преимущество.Если они не могут, они могут быть переведены на более низкий уровень рынка.
устройств LiDAR — Sentek Solutions Ltd
URG-04LX
Узнать большеДиапазон 4 м, последовательное (RS232) соединение, чрезвычайно точный LiDAR.
URG-04LX-UG01
Узнать большеБюджетный LiDAR диапазона 4 м, двойной USB для подключения и питания.
УБГ-04LX-F01
Узнать большеДиапазон 4 м, быстрая скорость сканирования (35 Гц), последовательное соединение (RS232).
UST-05LX
Узнать большеДиапазон 5 м, соединение Ethernet, угол обзора 270 °, 0.Угловое разрешение 25 °.
UST-10LX
Узнать большеДиапазон 10 м, соединение Ethernet, поле зрения 270 °, угловое разрешение 0,25 °.
UST-10LX-H01 / H02
Узнать большеДиапазон 10 м, соединение Ethernet, угол обзора 270 °, 0.Угловое разрешение 125 °.
UST-20LX
Узнать большеДиапазон 20 м, соединение Ethernet, поле зрения 270 °, угловое разрешение 0,25 °.
UST-20LX-H01
Узнать большеДиапазон 20 м, соединение Ethernet, угол обзора 270 °, 0.Угловое разрешение 125 °.
UST-30LX
Узнать большеДиапазон 30 м, соединение Ethernet, поле зрения 270 °, угловое разрешение 0,25 °.
УСТ-30ЛК
Узнать большеДиапазон 30 м, соединение Ethernet, угол обзора 270 °, 0.Угловое разрешение 125 °.
UTM-30LX
Узнать большеДиапазон 30 м, USB-соединение, IP64, угол обзора 270 °.
UTM-30LX-EW
Узнать большеДиапазон 30 м, подключение к сети Ethernet, угол обзора 270 °, IP67, мультиэхо-устройство.
UTM-30LX-FEW
Узнать большеДиапазон 30 м, соединение Ethernet, поле зрения 270 °, сверхбыстрый (100 Гц) LiDAR.
UTM-30LX-F
Узнать большеДиапазон 30 м, высокоскоростной (100 Гц) LiDAR, угол обзора 270 °, USB-соединение.
UXM-30LXH-EWA
Узнать большеДиапазон 80 м, LiDAR для наружного применения, встроенный обогреватель, Ethernet, поле зрения 190 °.
URM-40LC-EWT
Узнать большеДиапазон 40 м, соединение Ethernet с настраиваемым разрешением.
UGM-50LXP
Узнать большеДиапазон 200 м, чрезвычайно надежный LiDAR для наружного применения, мультиэхо, встроенный обогреватель.
УГМ-50ЛАП
Узнать большеПрочное наружное устройство Ethernet с диапазоном действия 200 м, способное работать при -40 ° C.
M1-Core
Узнать большеДиапазон 100 м, соединение Ethernet, поле обзора 360º.
M1-Plus
Узнать большеДиапазон 150 м, соединение Ethernet, поле обзора 360º.
М1-Ультра
Узнать большеДиапазон 200 м, соединение Ethernet, поле обзора 360º.
Блок LiDAR менее чем за 100 долларов | Новости Geo Week
Обновление: компания Garmin приобрела PulsedLight и повторно выпустила LiDAR Lite.
PulsedLight не ставила перед собой задачу создать недорогой продукт. Генеральный директор и соучредитель Деннис Кори сказал SPAR, что идея датчика PulsedLight заключалась в том, чтобы «найти область в патентном ландшафте, где есть возможность разработать инновационную технологию, не имеющую никакого отношения к какой-либо другой. существующая интеллектуальная собственность. И оказалось, что открытий было не так много ».
В результате были получены самые дешевые устройства LiDAR на рынке — LiDAR-Lite. Стоимость одного 2D-датчика составляет всего 89 долларов, и это всего лишь рекомендованная производителем розничная цена — розничная цена ближе к 75 долларам.
SPAR поговорил с Кори о том, как работает эта технология, как недорогой LiDAR привел к некоторым творческим применениям и как они планируют адаптировать свою недорогую технологию для профессиональных приложений, даже для многопиксельного 3D-сканирования.
Как они это сделали?
Поскольку Кори описывает технологию, лежащую в основе их датчиков, они «посылают модулированную« последовательность импульсов »и ищут уникальную сигнатуру этой последовательности импульсов в обратном сигнале. По сути, так работает радар — они посылают модулированный радиочастотный импульс и ищут этот ответ, используя задержку между передаваемым и принимаемым сигналами для измерения расстояния.”
Технология, разработанная PulsedLight, не измеряет только по времени задержки. Он также использует метод сопоставления сигнатур, называемый корреляцией сигналов, для сравнения исходного сигнала с возвращенным сигналом. Он оценивает задержку электронным способом, перемещая эти два сигнала друг над другом, чтобы найти наилучшее совпадение, а затем переводит эту информацию в расстояние в зависимости от скорости света. (Если вам нужно более подробное объяснение, посмотрите здесь.)
Кори объяснил, что положительным эффектом этой технологии является то, что каждая часть этой обработки сигнала может выполняться на одном микрочипе.Это означает, что устройствам PulsedLight не нужно использовать дополнительные аппаратные компоненты для обработки сигналов, такие как тонкие (и дорогие) часы, используемые во многих времяпролетных системах.
Процесс корреляции также работает достаточно эффективно для обработки сигналов низкого уровня от источников энергии с низким энергопотреблением. Например, в LiDAR-Lite используются менее дорогие оптические компоненты, чем в среднем устройстве конкурентов. Он использует детектор на штыревых диодах (0,30 доллара США), в то время как многие устройства используют лавинный фотодиодный детектор (15-20 долларов США), а их технология обработки сигналов позволяет использовать гораздо менее мощный лазер.
«С этими менее дорогими компонентами, — сказал мне Кори, — мы можем получить такую же производительность, как и более дорогие устройства. Или мы можем использовать более дорогие компоненты и увидеть значительный прирост производительности по сравнению с обычными системами ».
Проще говоря, технология позволяет им производить LiDAR-устройства по впечатляющей цене.
Что он может
Я задал Кори вопрос, который у всех на уме: насколько точен этот LiDAR-Lite? «У нас есть разрешение на уровне сантиметров, и мы заявляем о точности в 5% во всем диапазоне действия устройства, — сказал он, — но на самом деле мы наблюдаем точность в полпроцента в нашем практическом тестировании.«
. Скорее всего, этого недостаточно для строительных или геодезических работ, — признает Кори, — но для многих приложений, с которыми мы работаем, это вполне укладывается в рамки того, что они хотят делать». Сюда входят такие приложения, как контроль высоты с помощью БПЛА или простое двухмерное картографирование помещения.
Но это только начало. Поскольку устройство достаточно недорогое, чтобы попробовать то, что вы никогда не осмелились бы попробовать с более дорогим устройством, LiDAR-Lite становится популярным среди производителей и любителей.Некоторые люди уже нашли его чрезвычайно творческое применение, приклеив его к палке для измерения уровня топлива в подземном резервуаре и прикрепив к своим велосипедам в качестве системы раннего предупреждения. Некоторые искусные люди даже использовали его, чтобы создать лазерную воздушную арфу, которая звучит так, как будто бы использовали ELO.
Теперь любой, у кого есть 90 долларов и дешевый компьютер, может начать экспериментировать с устройствами LiDAR. И кто знает, как они начнут этим пользоваться.
PulsedLight, похоже, активно обслуживает таких пользователей.Кори сказал мне, что с самого начала компания приложила сознательные усилия, чтобы сделать устройство максимально доступным для как можно большего числа людей. «Я всегда говорил, что просто хочу, чтобы этот продукт попал в руки людей в простой форме, и посмотреть, что они с ним делают, и посмотреть, какие приложения они придумывают».
Что дальше? Недорогие профессиональные сканеры.
Хотя это правда, что это первый LiDAR, подходящий для любителей, цена и универсальность сканера позволили ему даже завоевать популярность у более требовательных профессиональных пользователей.Хотя никто в PulsedLight не ожидал, что кто-то установит 2D LiDAR-Lite на спиннер и будет использовать его для создания облаков точек, именно это и начало происходить.
В результате компания планирует создать высокоскоростную технологию для определенных профессиональных приложений, включая 2D-сканер с вращающимся основанием. Компания уже открыла предварительные заказы на LiDAR-Lite v2, который предлагает 500 считываний в секунду по сравнению со 100 показаниями в секунду в исходной версии. Это должно сделать устройство более привлекательным для людей, которые хотят использовать устройство для создания 3D-изображений или приложений машинного зрения, а оно всего на 30 долларов или около того дороже, чем его предшественник.В планах на будущее — устройство, которое сканирует со скоростью до 2 кГц.
Как будто этого недостаточно, PulsedLight планирует создать многоканальный массив. Кори сказал мне, что «производственные затраты составляют порядка 1 доллара за канал, чтобы превратить его в многолучевую систему. Таким образом, стоимость масштабирования в многопиксельных приложениях невысока. И у нас есть планы сделать это ».
Недорогая многоканальная система, которая работала бы как флэш-LiDAR, несомненно, привлекла бы внимание многих.
Лидар — одна из самых крутых уловок iPhone и iPad, и она только улучшается
Лидарный датчик iPhone 12 Pro — черный кружок в правом нижнем углу камеры — открывает возможности дополненной реальности и многое другое.
Патрик Холланд / CNET Эта история является частью Apple Event, нашего полного освещения последних новостей из штаб-квартиры Apple.Apple демонстрирует оптимизм в отношении лидаров — технологии, совершенно новой для семейства iPhone 12, в частности, для iPhone 12 Pro и iPhone 12 Pro Max.Ходят слухи, что лидар появится на всех четырех моделях линейки Apple iPhone 13 (хотя мы, вероятно, не увидим его на мероприятии Apple «Spring Loaded» 20 апреля). Присмотритесь к одной из новых моделей iPhone 12 Pro или новейшему iPad Pro, и вы увидите небольшую черную точку возле линз камеры, примерно такого же размера, как и вспышка. Это датчик лидара, и это новый тип измерения глубины, который может иметь большое значение во многих интересных отношениях.
Подробнее: Лидарные технологии iPhone 12 не просто улучшают фотографии.Проверьте этот крутой трюк для вечеринок
Если у Apple есть свой путь, лидар — это термин, который вы сейчас начнете часто слышать, поэтому давайте разберем то, что мы знаем, для чего Apple собирается использовать его и где технология может развиваться дальше. . И если вам интересно, что он делает прямо сейчас, я тоже потратил немного времени на эту технологию.
Что означает лидар?
Лидар используется для обнаружения света и определения дальности.Он использует лазеры, чтобы отразить объекты и вернуться к источнику лазера, измеряя расстояние по времени прохождения или полета светового импульса.
Пробую некоторые из приложений AR с поддержкой LiDAR, которые я могу найти для iPad Pro 2020 года, чтобы показать сетку. Вот один под названием Primer, ранняя сборка для тестирования обоев на стенах pic.twitter.com/SatibguyTm
— Скотт Стейн (@jetscott) 14 апреля 2020 г.
Как лидар определяет глубину?
Лидар — это разновидность времяпролетной камеры.Некоторые другие смартфоны измеряют глубину с помощью одного светового импульса, тогда как смартфон с этим типом лидарной технологии посылает волны световых импульсов в виде брызг инфракрасных точек и может измерять каждую из них своим датчиком, создавая поле точек, которое отображает расстояния. и может «объединять» размеры пространства и объектов в нем. Световые импульсы невидимы для человеческого глаза, но вы можете увидеть их с помощью камеры ночного видения.
Разве это не похоже на Face ID на iPhone?
Есть, но с большей дальностью.Идея та же: камера TrueDepth, поддерживающая Face ID, также стреляет множеством инфракрасных лазеров, но может работать только на расстоянии до нескольких футов. Датчики на задней панели iPad Pro и iPhone 12 Pro работают на расстоянии до 5 метров.
Лидар уже используется во многих других технологиях.
Лидар — это технология, которая появляется повсюду. Он используется для беспилотных автомобилей или вспомогательного вождения.Используется для робототехники и дронов. Гарнитуры с дополненной реальностью, такие как HoloLens 2, имеют схожую технологию, отображающую пространство комнаты, прежде чем накладывать на нее трехмерные виртуальные объекты. Но у него также довольно долгая история.
Старый аксессуар Microsoft для Xbox с функцией определения глубины, Kinect, был камерой с инфракрасным сканированием глубины. Фактически, PrimeSense, компания, которая помогла создать технологию Kinect, была приобретена Apple в 2013 году. Теперь у нас есть датчики Apple TrueDepth для сканирования лица и сенсоры задней лидарной камеры.
Будьте в курсе последних новостей, обзоров и советов по iPhone, iPad, Mac, сервисам и программному обеспечению.
Камера iPhone 12 Pro лучше работает с лидаром
Времяпролетные камеры на смартфонах, как правило, используются для повышения точности и скорости фокусировки, и iPhone 12 Pro делает то же самое. Apple обещает лучшую фокусировку при слабом освещении, до шести раз быстрее в условиях низкой освещенности. Лидарное определение глубины также используется для улучшения эффектов режима ночного портрета.Пока что это оказывает влияние: прочтите наш обзор iPhone 12 Pro Max, чтобы узнать больше.
Лучшая фокусировка — это плюс, а также есть шанс, что iPhone 12 Pro может добавлять к изображениям больше данных 3D-фотографий. Хотя этот элемент еще не раскрыт, фронтальная камера Apple TrueDepth с датчиком глубины использовалась аналогичным образом с приложениями, и сторонние разработчики могли погрузиться в разработку и разработать некоторые дикие идеи. Это уже происходит.
Он также значительно улучшает дополненную реальность.
Лидар позволяет iPhone 12 Pro запускать приложения AR намного быстрее и быстро строить карту комнаты, чтобы добавить больше деталей.Многие обновления AR от Apple в iOS 14 используют лидар, чтобы скрыть виртуальные объекты за реальными (так называемая окклюзия) и помещать виртуальные объекты в более сложные сопоставления комнат, например, на столе или стуле.
Я тестировал его на аркадной игре Hot Lava от Apple, которая уже использует лидар для сканирования комнаты и всех ее препятствий. Я мог размещать виртуальные объекты на лестницах и прятать их за реальными объектами в комнате. Ожидайте гораздо больше приложений AR, которые начнут добавлять поддержку лидара, как это, для более богатого опыта.
Следующая волна линз Snapchat начнет использовать определение глубины с помощью лидара iPhone 12 Pro.
SnapchatНо есть и дополнительный потенциал, с более длинным хвостом. Многие компании мечтают о гарнитурах, в которых виртуальные объекты будут сочетаться с реальными: очки AR, над которыми работают Facebook, Qualcomm, Snapchat, Microsoft, Magic Leap и, скорее всего, Apple и другие, будут полагаться на наличие продвинутых 3D-карт мира. слой виртуальных объектов на.
Эти 3D-карты сейчас строятся с помощью специальных сканеров и оборудования, почти как сканирующие мир автомобили с Google Maps. Но есть вероятность, что собственные устройства людей могут в конечном итоге помочь в краудсорсинге этой информации или добавить дополнительные данные на лету. Опять же, гарнитуры AR, такие как Magic Leap и HoloLens, уже предварительно сканируют вашу среду, прежде чем накладывать в нее элементы, и технология AR, оснащенная лидаром Apple, работает таким же образом. В этом смысле iPhone 12 Pro и iPad Pro похожи на гарнитуры AR без гарнитуры…. и в конечном итоге может открыть для Apple путь к созданию собственных очков.
3D-сканирование комнаты из приложения Occipital Canvas с помощью лидара с измерением глубины на iPad Pro. Ожидайте того же от iPhone 12 Pro, а может, и большего.
ЗатылочныйТрехмерное сканирование может быть смертельным приложением
Лидар можно использовать для создания сетки трехмерных объектов и комнат, а также для наложения фотоизображений наверх, метод, называемый фотограмметрией.Это может быть следующая волна технологий захвата для практического использования, например, для обустройства дома или даже для социальных сетей и журналистики. Возможность захвата 3D-данных и обмена этой информацией с другими может сделать эти оборудованные лидаром телефоны и планшеты инструментами для захвата 3D-контента. Лидар также можно использовать без элемента камеры для измерения объектов и пространств.
Я уже пробовал несколько первых приложений для 3D-сканирования с поддержкой лидаров на iPhone 12 Pro с переменным успехом (приложение 3D-сканер, Lidar Scanner и Record3D), но их можно использовать для сканирования объектов или картирования комнат с удивительной скоростью. .16-футового эффективного диапазона сканирования лидара достаточно, чтобы охватить большинство комнат в моем доме, но на больших открытых пространствах требуется больше перемещений. Опять же, фронтальная камера TrueDepth от Apple уже делает аналогичные вещи на более близком расстоянии.
Сейчас играет: Смотри: Наш подробный обзор iPhone 12 и 12 Pro
13:48
Apple не первая, кто изучает подобные технологии на телефоне
Google имел в виду ту же идею, когда создавался Project Tango — ранняя платформа AR, которая была только на двух телефонах.Усовершенствованный массив камер также имел инфракрасные датчики и мог отображать комнаты, создавая 3D-сканирование и карты глубины для AR и для измерения внутренних пространств. Телефоны Google, оснащенные Tango, просуществовали недолго, их заменили алгоритмы компьютерного зрения, которые измеряли глубину с помощью камер без использования того же оборудования. Но iPhone 12 Pro от Apple выглядит значительно более продвинутым преемником, с возможностями для этого лидара, которые распространяются на автомобили, гарнитуры AR и многое другое.
Будьте в курсе последних новостей, обзоров и советов по iPhone, iPad, Mac, сервисам и программному обеспечению.
Lidar vs Radar: плюсы и минусы автономного вождения | Отслеживание автопарка, технология LIDAR, автомобилестроение, подключенные автомобили | Cprime
Крупные всемирно известные компании, такие как Tesla и Google, оснащают свои автомобили лазерными детекторами, позволяющими им видеть другие автомобили, пешеходов и различные препятствия на дороге во время движения.К сожалению, эти системы обнаружения дороги, и есть гораздо более дешевые альтернативные устройства для выполнения тех же задач — вопрос в том, достаточно ли эффективны варианты, чтобы полностью заменить более дорогие инструменты в специализированных решениях для автомобильных компаний.
В этой статье мы сделаем обзор LIDAR и RADAR дистанционного зондирования и определим преимущества каждой системы.
Что такое лидар?
ЛИДАР также известен как Light Imaging Detection and Ranging.Это технология, которая обнаруживает объекты на поверхности, а также их размер и точное расположение.
ЛИДАР появился на рынке после RADAR и SONAR, и он использует лазерные световые импульсы для сканирования окружающей среды, в отличие от радио или звуковых волн. Военные США и НАСА изобрели технологию LIDAR более 45 лет назад для измерения расстояний в космосе, хотя первое коммерческое использование этой технологии началось только в 1995 году для топографических нужд.
Теперь конструкция системы LIDAR довольно компактна и позволяет промышленности применять эту технологию для новых целей.То же самое часто называют и устройство, использующее технологию LIDAR; это сканер, который может создать цифровую копию любого физического объекта и сэкономить больше времени по сравнению с созданием чертежа с нуля.
Как работает дистанционное зондирование LiDAR?
Алгоритм работы лидара следующий:
- Излучаются лазерные сигналы
- Лазерные сигналы достигают препятствия
- Сигнал отражается от препятствия
- Сигнал возвращается в приемник
- и затем регистрируется лазерный импульс
Устройство излучает лазерные импульсы, которые движутся наружу в различных направлениях, пока сигналы не достигнут объекта, а затем отражаются и возвращаются к приемнику.Фактически, это тот же принцип, который использует SONAR, за исключением того, что SONAR излучает звуковые волны. С LIDAR свет в 1000000 раз быстрее звука. Например, во время урагана с молниями — сначала мы видим молнию, а слышим звук только через пару секунд.
Такая высокая скорость позволяет устройству получать данные от огромного количества лазерных импульсов каждую секунду. Это означает, что информация обновляется чаще и, как следствие, получаются более точные данные. Внутренний процессор сохраняет каждую точку отражения лазера и генерирует трехмерное изображение окружающей среды.Эти принципы работы позволяют создавать точные карты, например, с помощью лидара, установленного на борту самолета.
Кроме того, тот же процессор может вычислить расстояние между обнаруженным объектом и приемником LIDAR, используя простую школьную формулу, в которой известны скорость лазерного импульса и время отражения, а затем мы вычисляем расстояние, которое проходит лазерный импульс. Эта возможность нашла свое применение в автомобильной промышленности и процветает там: все автомобили без водителя используют бортовые лидары для сканирования окружающей среды.
Где используется ЛИДАР?
В Государственном университете Портленда, США, они используют технологию системы LIDAR для проверки роста деревьев в разросшихся экосистемах с большой площадью поверхности. Исследователи оснащают самолеты этими устройствами, которые дают им возможность отслеживать появление каждого листа и ветки.
Используя LIDAR, НАСА рассчитало температуру стратосферы путем измерения плотности элементов атмосферы. Кроме того, киноиндустрия также использует эту технологию для воссоздания редких или эксклюзивных сред, которые иным образом запрещены для использования в коммерческих и визуальных целях.
Изобретение этой технологии оказало огромное влияние на развитие автомобильной промышленности. Беспилотные и беспилотные автомобили используют LIDAR для сканирования окрестностей и планирования поведения автомобиля, чтобы избежать столкновений с препятствиями.
Уязвимость лидара
Легко создать ложное эхо, которое заставит устройство обнаруживать существующие объекты дальше или ближе, чем они на самом деле используют два передатчика с той же длиной волны сигнала, что и у оригинального лидара.Только один приемопередатчик и два генератора импульсов могут создавать несколько копий сигналов LIDAR и отправлять их приемнику, что позволяет устройству видеть несуществующие объекты.
Что такое РАДАР?
РАДАР, также известный как радиообнаружение и определение дальности, используется для обнаружения объектов на расстоянии, определения их скорости и расположения. Все мы знакомы с этим устройством, поскольку полиция использует его в большинстве районов для обнаружения и регулирования скорости транспортных средств на дорогах.
Радиолокационная система была изобретена в 1940 году, незадолго до Второй мировой войны; однако на самом деле разработка началась в 1886 году, когда один немецкий физик понял, что радиоволны могут отражаться от твердых объектов. Ниже описан принцип работы РАДАРА.
Как работает РАДАР?
Звуковое эхо позволяет нам определить, насколько далеко что-то находится, используя отражение звуковой волны от твердых объектов. Время, необходимое для распространения звука вперед и назад, определяется расстоянием до источника звука и поверхностью, отражающей звуковые волны.В то же время доплеровский сдвиг эхо-сигнала позволяет нам определять скорость движущегося объекта, измеряя высоту эхо-сигнала.
Этот принцип основан на системе RADAR, с той лишь разницей, что RADAR использует радиоволны вместо звука. Радиоволны могут распространяться намного дальше звука и не обнаруживаются органами чувств человека. Итак, основное различие между LIDAR и RADAR заключается в том, что они используют разные сигналы для обнаружения объектов, хотя принцип работы совершенно одинаковый.
Причем, у радиоволн и световых волн одна и та же скорость — скорость света. Итак, когда дело доходит до вопроса о том, насколько быстро данные обновляются в каждой системе (системы LIDAR или RADAR), у нас есть справедливая ничья.
Как используется РАДАР?
Наиболее широко радары используются в военных целях. Самолеты, оснащенные радиолокаторами, могут точно измерять высоту и обнаруживать другие воздушные транспортные устройства поблизости. Морские радиолокационные системы используются аналогичным образом для измерения расстояния между другими кораблями для предотвращения столкновений.
Эта технология также используется для краткосрочного прогнозирования погоды для мониторинга ветра и осадков. В геологии используется геолого-разведочный радар для определения состава земной коры. Наконец, полиция использует радары для отслеживания скорости движения, хотя в последнее время LIDAR получил более широкое распространение в этой области из-за своей точности.
Уязвимость радара
Использование приемника радиоволн и передатчика с той же длиной волны, что и исходный радар, позволяет создать радиошум, который заставит устройство считать скорость движущегося объекта равной нулю.Вот почему, когда дело доходит до систем RADAR и LIDAR для беспилотных автомобилей, оба устройства поддаются обману и имеют одинаковый уровень безопасности.
Сравнение RADAR и LIDAR
Преимущества LIDAR перед RADAR | Преимущества RADAR перед LIDAR |
| Короткая длина волны позволяет нам обнаруживать небольшие объекты. LIDAR может построить точное трехмерное монохроматическое изображение объекта. Недостатки использования LIDAR Ограниченное использование в ночное время / в пасмурную погоду.Высота эксплуатации всего 500-2000м. Довольно дорогая технология. | РАДАР может легко работать как в пасмурную погоду, так и в ночное время. Увеличенное рабочее расстояние. Недостатки использования РАДАРА Более короткая длина волны не позволяет обнаруживать мелкие объекты. РАДАР не может предоставить пользователю точное изображение объекта из-за большей длины волны. |
Если мы будем сравнивать эти две технологии по отдельности без какой-либо предыстории, это будет пустой тратой времени.У них схожие принципы работы, но в каждом используются разные типы волн и источники волн. RADAR использует антенну для излучения радиосигналов, но устройство LIDAR имеет специализированную оптику и лазеры для приема и передачи.
Радары, очевидно, более удобны, когда расстояние обнаружения более важно, чем реальный вид объекта. Например, в воздухе что-то большое летит, скорее всего, это самолет, и важно как можно скорее обнаружить его, чтобы избежать столкновения.