Кондукционный электромагнитный подвес. Активный магнитный подшипник
В разнообразной современной электромеханической продукции и технических изделиях, магнитный подшипник является основным узлом, который определяет технические и экономические характеристики и увеличивает безотказный эксплуатационный период. По сравнению с традиционными подшипниками, в магнитных подшипниках полностью отсутствует сила трения между неподвижными и подвижными деталями. Наличие такого свойства позволяет реализовывать повышенные скорости в конструкциях магнитных систем. Магнитные подшипники изготавливаются из высокотемпературных сверхпроводящих материалов, которые рационально влияют на их свойства. К таким свойствам можно отнести существенное снижение затрат на модельные конструкции систем охлаждения и такой важный параметр, как длительное поддержание магнитного подшипника в рабочем состоянии.
Принцип работы магнитных подвесов
Принцип работы магнитных подвесов основан на применении свободной левитации
, которая создается магнитными и электрическими полями.
- магнитные и гидродинамические подвесы;
- подвесы, работающие на постоянных магнитах;
- активные магнитные подшипники;
- кондиционные подвесы;
- LC- резонансные виды подвесов;
- индукционные подшипники;
- диамагнитные типы подвесов;
- сверхпроводящие подшипники;
- электростатические подвесы.


Если протестировать все эти типы подвесов по популярности, то в нынешних реалиях, заняли лидирующие позиции активные магнитные подшипники (АМП
). По виду они представляют собой мехатронную систему устройства, в которой стабильное состояние ротора, осуществляется присутствующими силами магнитного притяжения. Эти силы воздействуют на ротор с боку электромагнитов, электрический ток в которых настраивается системой автоматического управления на сигналах датчиков электронного блока управления. В таких блоках управления может применяться как традиционная аналоговая, так и более инновационная система цифровой обработки сигналов. Активные магнитные подшипники имеют великолепные динамические характеристики, надежность и высокий КПД. Уникальные возможности активных магнитных подшипников способствуют их повсеместному внедрению. АМП
эффективно применяются, к примеру, в таком оборудовании:
— скоростные роторные системы;
— электродвигатели;
— турбодетандеры;
— накопители инерционной энергии и т.
 д.
д.Пока активные магнитные подшипники требуют внешнего источника тока и дорогостоящей и сложной аппаратуры управления. На данный момент разработчики АМП проводят активные работы по созданию пассивного вида магнитных подшипников.
Магнитный подшипник, как и остальные механизмы подшипниковой группы, служит опорой для вращающегося вала. Но в отличие от распространенных подшипников качения и подшипников скольжения соединение с валом является механически бесконтактным, то есть используется принцип левитации.
Классификация и принцип работы
Используя принцип левитации, вращающийся вал буквально парит в мощном магнитном поле. Контролировать движение вала и координировать работу магнитной установки позволяет сложная система датчиков, которая постоянно отслеживает состояние системы и подает необходимые управляющие сигналы, меняя силу притяжения с той или иной стороны.Магнитные подшипники делятся на две большие группы – активные и пассивные. Более подробно об устройстве каждого типа подшипника ниже.
- Активные магнитные подшипники.
1, 3 – силовые катушки; 2 — вал Различают радиальный и упорные механизмы (по типу воспринимаемой нагрузки), но принцип работы у них один и тот же. Используется специальный ротор (обычный вал не подойдет), модифицированный ферромагнитными блоками. Этот ротор «висит» в магнитном поле, создаваемом электромагнитными катушками, которые находятся на статоре, то есть вокруг вала на 360 градусов, образуя кольцо.
Между ротором и статором образуется воздушный зазор, что позволяет деталям вращаться с минимальным трением.
Изображенным механизмом управляет специальная электронная система, которая с помощью датчиков постоянно отслеживает положение ротора относительно катушек и при малейшем его смещении подает управляющий ток на соответствующую катушку.
Расчет таких системы можно более детально изучить в приложенной документации .
- Пассивные магнитные подшипники.
Ротор оснащен постоянным магнитом так же, как и статор, расположенный кольцом вокруг ротора. Одноименные полюса расположены рядом в радиальном направлении, что создает эффект левитации вала. Подобную систему можно даже собрать своими руками.
Преимущества
Разумеется, основным преимуществом является отсутствие механического взаимодействия между вращающимся ротором и статором (кольцом).Из этого следует, что подобные подшипники очень долговечны, то есть обладают повышенной износоустойчивостью. Также конструкция механизма позволяет использовать его в агрессивных средах – повышенная/пониженная температура, агрессивная воздушная среда. Поэтому МП находят все большее применение в космической промышленности.

Недостатки
К сожалению, система обладает и большим количеством недостатков. К ним относятся:- Сложность управления активными подвесами. Необходима сложная, дорогостоящая электронная система управления подвесом. Ее использование может быть оправдано только в «дорогих» отраслях – космической и военной.
- Необходимость использования страховочных подшипников. Резкое отключение электричества или выход из строя магнитной катушки может привести к катастрофическим последствиям для всей механической системы. Поэтому для страховки совместно с магнитными используют и механические подшипники. В случае отказа основных, они смогут взять на себя нагрузки и избежать серьезной поломки.
- Нагрев обмотки катушек. Вследствие прохождения тока, создающего магнитное поле, обмотка катушек нагревается, что зачастую является неблагоприятным фактором. Поэтому необходимо использовать специальные охлаждающие установки, что еще больше увеличивает стоимость использования подвеса.

Области применения
Возможность работы при любых температурах, в условиях вакуума и отсутствия смазки позволяет использовать подвесы в космической промышленности, в станках нефтеперерабатывающей промышленности. Также они нашли свое применение в газовых центрифугах для обогащения урана. Различные электростанции также используют магнитные подвесы в своих генерирующих установках.Ниже несколько интересных видео по теме.
Многие потребители подшипников считают магнитные подшипники своеобразным «черным ящиком», хотя в промышленности их применяют довольно долго. Обычно они используются при транспортировке или подготовке природного газа, в процессах его сжижения и так далее. Часто они используются плавучими газоперерабатывающими комплексами.
Часто они используются плавучими газоперерабатывающими комплексами.
Магнитные подшипники функционируют за счет магнитной левитации. Они работают благодаря силам, образующимся за счет магнитного поля. При этом поверхности между собой не контактируют, поэтому отсутствует необходимость в смазке. Данный тип подшипников способен функционировать даже в довольно жестких условиях, а именно при криогенных температурах, экстремальных показателях давления, высоких скоростях и так далее. При этом магнитные подшипники показывают высокую надежность.
Ротор радиального подшипника, который оснащен ферромагнитными пластинами, с помощью магнитных полей, создаваемых, размещенными на статоре электромагнитами, удерживается в нужной позиции. Функционирование осевых подшипников основано на таких же принципах. При этом напротив электромагнитов на роторе, находится диск, который установлен перпендикулярно к оси вращения. Позицию ротора отслеживают индукционные датчики. Данные датчики быстро определяют все отклонения от номинальной позиции, в результате чего создают сигналы, управляющие токами в магнитах.
Преимущества магнитных подшипников неоспоримы : они не требуют смазки, не угрожают окружающей среде, потребляют мало энергии и благодаря отсутствию соприкасающихся и трущихся частей работают продолжительное время. Кроме того магнитные подшипники обладают низким уровнем вибраций. Сегодня существуют модели со встроенной системой мониторинга и контроля состояния. На данный момент магнитные подшипники в основном применяются в турбокомпрессорах и компрессорах для природного газа, водорода и воздуха, в криогенной технике, в рефрижераторных установках, в турбодетандерах, в вакуумной технике, в электрогенераторах, в контрольном и измерительном оборудовании, в высокоскоростных полировальных, фрезерных и шлифовальных станках.
Главный недостаток магнитных подшипников — зависимость от магнитных полей. Исчезновение поля может привести к катастрофической поломке системы, поэтому зачастую их используют со страховочными подшипниками. Обычно в качестве них используют подшипники качения, способные выдержать два или один отказ магнитных моделей, после этого требуется их незамедлительная замена. Также для магнитных подшипников применяют громоздкие и сложные системы управления, значительно затрудняющие эксплуатацию и ремонт подшипника. К примеру, для управления данными подшипниками зачастую устанавливают специальный шкаф управления. Данный шкаф является контроллером, взаимодействующим с магнитными подшипниками. С его помощью на электромагниты подается ток, регулирующий положение ротора, гарантирующий его бесконтактное вращение и поддерживающий его стабильное положение. Кроме того, во время эксплуатации магнитных подшипников может возникать проблема нагревания обмотки данной детали, которая происходит за счет прохождения тока. Поэтому с некоторыми магнитными подшипниками иногда устанавливают дополнительные охлаждающие системы.
Обычно в качестве них используют подшипники качения, способные выдержать два или один отказ магнитных моделей, после этого требуется их незамедлительная замена. Также для магнитных подшипников применяют громоздкие и сложные системы управления, значительно затрудняющие эксплуатацию и ремонт подшипника. К примеру, для управления данными подшипниками зачастую устанавливают специальный шкаф управления. Данный шкаф является контроллером, взаимодействующим с магнитными подшипниками. С его помощью на электромагниты подается ток, регулирующий положение ротора, гарантирующий его бесконтактное вращение и поддерживающий его стабильное положение. Кроме того, во время эксплуатации магнитных подшипников может возникать проблема нагревания обмотки данной детали, которая происходит за счет прохождения тока. Поэтому с некоторыми магнитными подшипниками иногда устанавливают дополнительные охлаждающие системы.
Один из крупнейших производителей магнитных подшипников — компания S2M, которая участвовала в разработке полного жизненного цикла магнитных подшипников, а также двигателей с постоянными магнитами: начиная с разработки и заканчивая вводом в эксплуатацию, производством и практическими решениями. Компания S2M всегда старалась придерживаться инновационной политики, направленной на упрощение конструкции подшипников, необходимой для снижения затрат. Она старалась сделать магнитные модели более доступными для более широкого использования рынком промышленных потребителей. С фирмой S2M сотрудничали компании, изготавливающие различные компрессоры и вакуумные насосы в основном для нефтегазовой отрасли. В свое время сеть сервисов S2M раскинулась по всему миру. Ее офисы имелись в России, Китае, Канаде и Японии. В 2007 фирму S2M приобрела группа SKF за пятьдесят пять миллионов евро. Сегодня магнитные подшипники по их технологиям изготавливаются производственным подразделением A&MC Magnetic Systems.
Компания S2M всегда старалась придерживаться инновационной политики, направленной на упрощение конструкции подшипников, необходимой для снижения затрат. Она старалась сделать магнитные модели более доступными для более широкого использования рынком промышленных потребителей. С фирмой S2M сотрудничали компании, изготавливающие различные компрессоры и вакуумные насосы в основном для нефтегазовой отрасли. В свое время сеть сервисов S2M раскинулась по всему миру. Ее офисы имелись в России, Китае, Канаде и Японии. В 2007 фирму S2M приобрела группа SKF за пятьдесят пять миллионов евро. Сегодня магнитные подшипники по их технологиям изготавливаются производственным подразделением A&MC Magnetic Systems.
Компактные и экономичные модульные системы, оборудованные магнитными подшипниками, используются в промышленности все шире. По сравнению с привычными традиционными технологиями они обладают множеством преимуществ. Благодаря миниатюризованным инновационным системам «двигатель / подшипник» стала возможна интеграция таких систем в современную серийную продукцию. Они сегодня используются в высокотехнологичных отраслях (производство полупроводников). Последние изобретения и разработки в области магнитных подшипников четко направлены на максимальное конструкционное упрощение данного изделия. Это нужно для снижения затрат на подшипники, что сделает их более доступными для использования широким рынком промышленных потребителей, которые несомненно нуждаются в такой инновации.
Они сегодня используются в высокотехнологичных отраслях (производство полупроводников). Последние изобретения и разработки в области магнитных подшипников четко направлены на максимальное конструкционное упрощение данного изделия. Это нужно для снижения затрат на подшипники, что сделает их более доступными для использования широким рынком промышленных потребителей, которые несомненно нуждаются в такой инновации.
ПРЕДИСЛОВИЕ
Основным элементом многих машин является ротор, вращающийся в подшипниковых опорах. Рост скоростей вращения и мощностей роторных машин при одновременной тенденции к уменьшению массовых и габаритных показателей выдвигает проблему повышения долговечности подшипниковых узлов как первоочередную. Кроме того, в целом ряде областей современной техники требуются подшипники, способные надежно работать в экстремальных условиях: в вакууме, при высоких и низких температурах, сверхчистых технологиях, в агрессивных средах и т. п. Создание таких подшипников также является актуальной технической проблемой.
Решение указанных проблем может осуществляться как совершенствованием традиционных подшипников качения и скольжения. так и созданием нетрадиционных подшипников, в которых используются иные физические принципы действия.
Традиционные подшипники качения и скольжения (жидкостные и газовые) к настоящему пременн достигли высокого технического уровня. Однако природа протекающих в них процессов ограничивает, о иногда делает принципиально невозможным применение этих подшипников для достижения указанных выше целей. Так, существенными недостатками подшипников качения являются наличие механического контакта между подвижными и неподвижными частями и необходимость в смазке дорожек качения. В подшипниках скольжения механический контакт отсутствует, но необходимы система иодичн смазочного материала для создания смазочного слоя и герметизация этого слоя. Очевидно, что совершенствование узлов герметизации может лишь уменьшить, но не полиостью устранить взаимное проникновение смазочного материала и внешней среды.
От указанных недостатков свободны подшипники, в которых для создания опорных реакций используются магнитные и электрические поля. Среди них наибольший практический интерес представляют активные магнитные подшипники (АМП). Работа АМН основана нл известном принципе активного магнитного подвеса ферромагнитного тела: стабилизация тела заданном положении осушссталястся силами магнитного притяжения, действующими на тело со стороны управляемых электромагнитов. Токи в обмотках электромагнитов формируются при помощи системы автоматического управления, состоящей из датчиков перемещений тела, электронного регулятора и усилителей мощности, питающихся от внешнего источника электрической энергии.
Первые примеры практического использования активных магнитных подвесов в измерительных приборах относятся к 40-м годам XX столетия. Они связаны с именами Д. Бимса и Д. Хри-зингера (США) и О. Г. Кацнельсона и А. С. Эдельштейна (СССР). Первый активный магнитный подшипник был предложен и экспериментально исследован в 1960 году Р. Сикссмитом (США). Широкое практическое применение АМН в нашей стране и за рубежом началось в начале 70-х годов XX столетня.
Сикссмитом (США). Широкое практическое применение АМН в нашей стране и за рубежом началось в начале 70-х годов XX столетня.
Отсутствие в АМП механического контакта и необходимости смазки делает их весьма перспективными во многих областях техники. Это, прежде всего: турбины и насосы в вакуумной и криогенной технике; машины для сверхчистых технологий и для работы в агрессивных средах; машины и приборы для ядерных и космических установок; гороскопы; инерционные накопители энергии; а также изделия для общего машиностроения и приборостроения — шлифовальные и фрезерные высокоскоростные шпиндели, текстильные машины. центрифуги, турбины, балансировочные станки, вибростенды, роботы, точные измерительные приборы и т. д.
Однако, несмотря на имеющиеся успехи, AMJI внедряются на практике значительно медленнее, чем это ожидалось из прогнозов, сделанных в начале 1970-х годов. Прежде всего, это объясняется замедленным восприятием промышленностью новшеств, в том числе и АМП. Как и любое новшество, чтобы быть востребованным, АМП нуждаются в популяризации.
К сожалению, на момент написания этих строк активным магнитным подшипникам посвящена лишь одна книга : G.Schweitzer. Н. Bleulerand A. Traxler «Active magnetic bearings», ETH Zurich, 1994, 244 p., изданная на английском и немецком языках. Небольшая по объему, эта книга ориентирована н первую очередь на читателя, делающего первые шаги в понимании тех проблем, которые возникают при создании АМП. Предъявляя весьма скромные требования к инженерной и математической подготовке читателя, авторы выстраивают основные идеи и понятия в такой продуманной последовательности, которая позволяет начинающему легко войти в курс дела и концептуально овладеть новой для себя областью. Несомненно, указанная книга является заметным явлением, а ее популяризаторскую роль трудно переоценить.
Читатель может спросить, стоило ли писать настоящую монографию, а не ограничиться переводом ни русский ялык цитированной выше книги . Во-первых, начиная с 1992 года меня приглашали прочитать лекции по АМН в университетах России. Финляндии и Швеции. Из этих лекций выросла книга. Во-вторых, многие мои коллеги высказывали желание получить книгу об ЛМП, написанную для разработчиков машин с АМП. В-третьих, я также сознавал, что многие инженеры, которые вовсе не специализируются в области АМП, нуждаются в книге, исследующей такой объект управления, как электромагнит.
Финляндии и Швеции. Из этих лекций выросла книга. Во-вторых, многие мои коллеги высказывали желание получить книгу об ЛМП, написанную для разработчиков машин с АМП. В-третьих, я также сознавал, что многие инженеры, которые вовсе не специализируются в области АМП, нуждаются в книге, исследующей такой объект управления, как электромагнит.
Цель этой книги состоит в том, чтобы вооружить инженеров методами математического моделирования, синтеза и анализа АМП и способствовать тем самым возбуждению интереса к этой новой области техники. Не сомневаюсь, что книга будет также полезна для студентов многих технических специальностей, особенно при курсовом и дипломном проектировании. При написании книги я опирался на 20-летний опыт работы в области АМП в качестве научного руководителя научно-исследовательской лаборатории магнитных опор при Псковском политехническом институте Санкт-Петербургского государственного технического университета.
Книга содержит 10 глав. В главе 1 дается краткое описание всех возможных видов электромагнитных подвесов, цель которого — расширить кругозор читателя. Глава 2, нацеленная на пользователей АМП, вводит читателя в технику активных магнитных подшипников — это история развития, конструкции, характеристики, проблемы освоения и несколько примеров практических приложений. В главах 3 и 4 приводится методика расчета магнитных цепей подшипников. Электромагнит как объект управления изучается в главе 5. В главе 6 решаются задачи синтеза регулятора и анализа динамики одностепенного магнитного подвеса. Это глава о том, как следует управлять подвесом и что может помешать получить требуемые динамические качества. Центральное место занимает глава 7, в которой рассматриваются задачи управления подвесом жесткого ротора, имеющего пять степенен свободы, исследуется взаимодействие подвеса и приводного электродвигателя, а также затронут вопрос создания бесподшнпннковых электрических машин. Влияние упругих изгибных деформаций ротора на динамику подвеса рассматривается в главе 8. Глава 9 посвящена цифровому управлению подвесом. В заключительной главе 10 рассматривается ряд динамических аспектов, связанных с реализацией подвесов роторов в АМП.
Глава 2, нацеленная на пользователей АМП, вводит читателя в технику активных магнитных подшипников — это история развития, конструкции, характеристики, проблемы освоения и несколько примеров практических приложений. В главах 3 и 4 приводится методика расчета магнитных цепей подшипников. Электромагнит как объект управления изучается в главе 5. В главе 6 решаются задачи синтеза регулятора и анализа динамики одностепенного магнитного подвеса. Это глава о том, как следует управлять подвесом и что может помешать получить требуемые динамические качества. Центральное место занимает глава 7, в которой рассматриваются задачи управления подвесом жесткого ротора, имеющего пять степенен свободы, исследуется взаимодействие подвеса и приводного электродвигателя, а также затронут вопрос создания бесподшнпннковых электрических машин. Влияние упругих изгибных деформаций ротора на динамику подвеса рассматривается в главе 8. Глава 9 посвящена цифровому управлению подвесом. В заключительной главе 10 рассматривается ряд динамических аспектов, связанных с реализацией подвесов роторов в АМП.
Что касается списка литературы в конце книги, то я не пытался включить в него все исторически заметные статьи по АМП и прошу прошения у тех исследователей, чьи вклады в эту область не упомянуты.
Поскольку круг вопросов весьма широк, оказалось невозможным сохранить одну систему условных обозначений по всей книге. Однако в каждой главе использована постоянная система обозначений.
Я благодарен своим учителям профессорам Давиду Рахмилье-вичу Меркнну и Анатолию Сауловнчу Кельзону — они во многом способствовали появлению этой книги. Я хотел бы поблагодарить моих коллег по лаборатории магнитных опор и университету, в особенности Федора Георгиевича Кочевина, Михаила Вадимовича Афанасьева. Валентина Васильевича Андреена, Сергея Владимировича Смирнова, Сергея Геннадьевича Стебихова и Игоря Ивановича Морозова, чьими усилиями созданы многие машины с АМП. Мне были также полезны беседы и совместная работа с профессором Камилом Шамсудднновичем Ходжаеным и доцентами Владимиром Александровичем Андреевым, Валерием Георгиевичем Боговым и Вячеславом Григорьевичем Мацевичем. Я хотел бы также отметить вклад дипломников и аспирантов, которые с большим энтузиазмом работали со мной в области АМП, — это Григорий Михайлович Крайзман, Николай Вадимович Хмылко, Аркадий Григорьевич Хростицкий, Николай Михаилович Ильин, Александр Михайлович Ветлнцын и Павел Васильевич Киселев. Особого упоминания заслуживает техническая помощь по подготовке рукописи к изданию Елены Владимировны Журавлевой и Андрея Семеновича Леонтьева.
Я хотел бы также отметить вклад дипломников и аспирантов, которые с большим энтузиазмом работали со мной в области АМП, — это Григорий Михайлович Крайзман, Николай Вадимович Хмылко, Аркадий Григорьевич Хростицкий, Николай Михаилович Ильин, Александр Михайлович Ветлнцын и Павел Васильевич Киселев. Особого упоминания заслуживает техническая помощь по подготовке рукописи к изданию Елены Владимировны Журавлевой и Андрея Семеновича Леонтьева.
За помощь в финансировании издания книги хочу поблагодарить Псковскую инженерную компанию и Псковский политехнический институт.
Всем известно, что магниты имеют свойство притягивать металлы. Также один магнит может притянуть другой. Но взаимодействие между ними не ограничено лишь притяжением, они могут отталкивать друг друга. Дело в полюсах магнита — разноименные полюса притягиваются, одноименные — отталкиваются. Это свойство положено в основу всех электродвигателей, и довольно мощных.
Также существует такое понятие, как левитация под действием магнитного поля, когда помещенный над магнитом предмет (имеющий сходный с ним полюс) зависает в пространстве. Этот эффект был применен на практике в так называемом магнитном подшипнике.
Этот эффект был применен на практике в так называемом магнитном подшипнике.
Что представляет собой магнитный подшипник
Устройство электромагнитного типа, в котором вращающийся вал (ротор) поддерживается в неподвижной части (статоре) силами магнитного потока, называется подшипником магнитным. Когда механизм находится в работе, на него оказывают влияние физические силы, стремящиеся сместить ось. Чтобы их преодолеть, магнитный подшипник оснастили системой контроля, которая следит за нагрузкой и подает сигнал управления силой магнитного потока. Магниты, в свою очередь, сильнее или слабее воздействует на ротор, сохраняя его в центральном положении.
Магнитный подшипник нашел широкое применение в промышленности. Это в основном мощные турбомашины. Благодаря отсутствию трения и, соответственно, необходимости применять смазочные материалы, во много раз повышается надежность машин. Износ узлов практически не наблюдается. Также повышается качество динамических характеристик и возрастает КПД.
Активные магнитные подшипники
Подшипник магнитный, где силовое поле создается при помощи электромагнитов, называется активным. Электромагниты позиционные расположены в статоре подшипника, ротор представлен металлическим валом. Вся система, обеспечивающая удержание вала в агрегате, называется активным магнитным подвесом (АМП). Он имеет сложное строение и состоит из двух частей:
- блока подшипников;
- системы электронного управления.
Основные элементы АМП
- Подшипник радиальный. Устройство, которое имеет электромагниты на статоре. Они удерживают ротор. На роторе имеются специальные пластины из ферромагнита. При подвешивании ротора в средней точке отсутствует его контакт со статором. Индуктивные датчики отслеживают малейшее отклонение положения ротора в пространстве от номинального. Сигналы от них управляют силой магнитов в той или иной точке для восстановления равновесия в системе. Зазор радиальный составляет 0.50-1.00 мм, осевой — 0.60-1. 80 мм.
 80 мм.
80 мм.- Магнитный работает таким же образом, как и радиальный. На валу ротора закреплен упорный диск, по обе стороны которого располагаются электромагниты, закрепленные на статоре.
- Подшипники страховочные предназначены для удержания ротора, когда устройство находится в выключенном состоянии либо в аварийных ситуациях. В процессе работы вспомогательные магнитные подшипники не задействованы. Зазор между ними и валом ротора в два раза меньше, чем у магнитного подшипника. Страховочные элементы собраны на базе шариковых устройств либо
- Электроника управления включает в себя датчики положения вала ротора, преобразователи и усилители. Вся система работает по принципу регулировки магнитного потока в каждом отдельном модуле электромагнита.
Пассивные подшипники магнитного типа
Магнитные подшипники на постоянных магнитах — это системы удержания вала ротора, в которых не используется схема управления, включающая обратную связь. Левитация осуществляется только за счет сил высокоэнергетических постоянных магнитов.
Недостатком такого подвеса является необходимость использования механического упора, что приводит к образованию трения и снижению надежности системы. Магнитный упор в техническом смысле еще не реализован в этой схеме. Поэтому на практике пассивный подшипник применяют нечасто. Есть запатентованная модель, например подвес Николаева, которую пока не удалось повторить.
Магнитная лента в ступичном подшипнике
Понятие «магнитный относится к системе ASB, которая широко используется в современных автомобилях. Подшипник ASB отличается тем, что внутри имеет встроенный датчик скорости вращения колеса. Этот датчик является активным устройством, внедренным в прокладку подшипника. Он построен на базе магнитного кольца, на котором чередуются полюсы элемента, считывающего изменение магнитного потока.
Когда подшипник вращается, происходит постоянное изменение магнитного поля, создаваемого магнитным кольцом. Датчик проводит регистрацию этого изменения, формируя сигнал. Далее сигнал попадает в микропроцессор. Благодаря нему работают такие системы, как ABS и ESP. Уже они корректируют работу автомобиля. ESP отвечает за электронную стабилизацию, ABS регулирует вращение колес, уровень давления в системе — тормозной. Он следит за работой рулевой системы, ускорением в боковом направлении, а также корректирует работу трансмиссии и двигателя.
Благодаря нему работают такие системы, как ABS и ESP. Уже они корректируют работу автомобиля. ESP отвечает за электронную стабилизацию, ABS регулирует вращение колес, уровень давления в системе — тормозной. Он следит за работой рулевой системы, ускорением в боковом направлении, а также корректирует работу трансмиссии и двигателя.
Главным плюсом подшипника ASB является возможность контролировать скорость вращения даже при очень низких оборотах. При этом массогабаритные показатели ступицы улучшаются, монтаж подшипника упрощается.
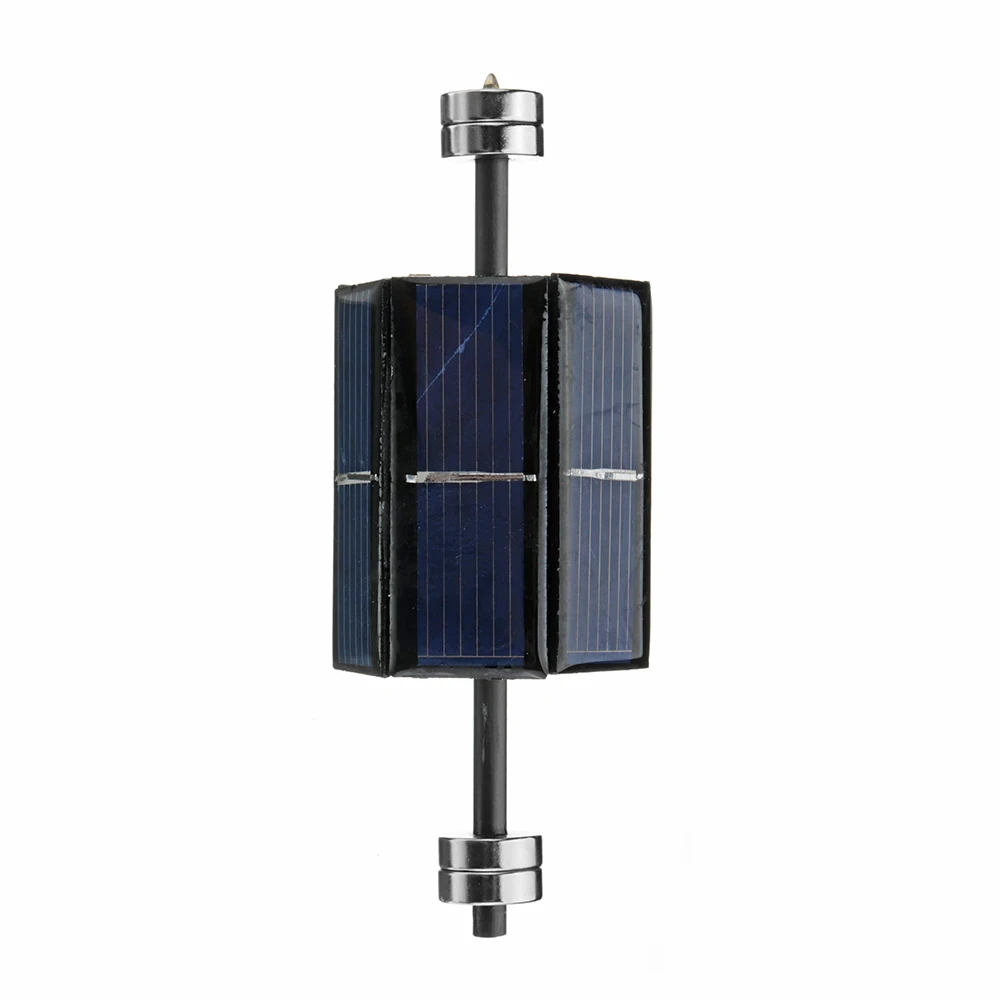
Как сделать подшипник магнитный
Простейший магнитный подшипник своими руками сделать несложно. Он не подойдет для практического применения, зато наглядно покажет возможности магнитной силы. Для этого понадобятся четыре неодимовых магнита одного диаметра, два магнита чуть меньшего диаметра, вал, например отрезок пластиковой трубки, и упор, например стеклянная пол-литровая банка. Магниты меньшего диаметра с помощью термоклея крепят к торцам трубки таким образом, чтобы получилась как бы катушка. Посередине одного из этих магнитов снаружи приклеивают пластиковый шарик. Одинаковые полюса должны смотреть наружу. Четыре магнита такими же полюсами вверх раскладывают попарно на расстоянии длины отрезка трубки. Ротор располагают над лежащими магнитами и с той стороны, где приклеен пластиковый шарик, подпирают его пластиковой банкой. Вот магнитный подшипник и готов.
Посередине одного из этих магнитов снаружи приклеивают пластиковый шарик. Одинаковые полюса должны смотреть наружу. Четыре магнита такими же полюсами вверх раскладывают попарно на расстоянии длины отрезка трубки. Ротор располагают над лежащими магнитами и с той стороны, где приклеен пластиковый шарик, подпирают его пластиковой банкой. Вот магнитный подшипник и готов.
Рекомендуем также
МАГНИТНЫЙ ПОДВЕС — это… Что такое МАГНИТНЫЙ ПОДВЕС?
- МАГНИТНЫЙ ПОДВЕС
- МАГНИТНЫЙ ПОДВЕС, бесконтактное подвешивание транспортных средств при движении над путевым устройством (зазор до 30 см), осуществляемое с помощью постоянных магнитов и электромагнитов с использованием тяговых линейных электродвигателей. Магнитный подвес применяется с конца 70-х гг. на подвижном составе высокоскоростных линий, может обеспечивать движение со скоростями до 500 км/ч.
Современная энциклопедия. 2000.
- МАГНИТНЫЕ ЧЕРНИЛА
- МАГНИТОЛА
Смотреть что такое «МАГНИТНЫЙ ПОДВЕС» в других словарях:
Магнитный подвес — МАГНИТНЫЙ ПОДВЕС, бесконтактное подвешивание транспортных средств при движении над путевым устройством (зазор до 30 см), осуществляемое с помощью постоянных магнитов и электромагнитов с использованием тяговых линейных электродвигателей. Магнитный … Иллюстрированный энциклопедический словарь
Турбомолекулярный насос — В этой статье не хватает ссылок на источники информации. Информация должна быть проверяема, иначе она может быть поставлена под сомнение и удалена. Вы можете … Википедия
Супермаховик — Один из … Википедия
Список изобретений, сделанных в Китае — Колесница с зонтом в упряжке из четырёх лошадей из терракотовой армии … Википедия
Электродинамический громкоговоритель — Низкочастотные электродинамические громкоговорители Электродинамический громкоговоритель это громкоговоритель, в котором преобразование электрического сигнала в звуковой прои … Википедия
Компас — I Компас (в морском деле компас) (нем.
Kompass, итал. compasso, от compassare измерять шагами), прибор для ориентирования на местности. По принципу действия К. разделяют на: магнитные, в которых используется свойство прямого постоянного… … Большая советская энциклопедияКомпас (в мор. деле) — Компас (в морском деле ≈ компас) (нем. Kompass, итал. compasso, от compassare ≈ измерять шагами), прибор для ориентирования на местности. По принципу действия К. разделяют на: магнитные, в которых используется свойство прямого постоянного магнита … Большая советская энциклопедия
Металлургический кран — … Википедия
Гироскопические устройства — гироскопические приборы, электромеханические устройства, содержащие Гироскопы, и предназначенные для определения параметров, характеризующих движение (или положение) объекта, на котором они установлены, а также для стабилизации этого… … Большая советская энциклопедия
Важнейшие открытия в физике — История технологий По периодам и регионам: Неолитическая революция Древние технологии Египта Наука и технологии древней Индии Наука и технологии древнего Китая Технологии Древней Греции Технологии Древнего Рима Технологии исламского мира… … Википедия
 Kompass, итал. compasso, от compassare измерять шагами), прибор для ориентирования на местности. По принципу действия К. разделяют на: магнитные, в которых используется свойство прямого постоянного… … Большая советская энциклопедия
Kompass, итал. compasso, от compassare измерять шагами), прибор для ориентирования на местности. По принципу действия К. разделяют на: магнитные, в которых используется свойство прямого постоянного… … Большая советская энциклопедияИзмерительные электромагнитные подвесы Кизимов А.
 Т.
Т.Артикул: 00-01021138
в желания В наличии
Автор: Кизимов А.Т.
Место издания: Ленинград
Год: 1990
Формат: 60х90 1/16
Переплет: Мягкая обложка
Страниц: 106
С этим товаром покупают
В обзоре обобщены результаты разработок в области измерительных электромагнитных подвесов. Основное внимание уделено рассмотрению подвесов как силокомпенсирующих систем автоматического регулирования с параметрическими обратными связями, их математических моделей, исследованию влияния характеристик магнитных материалов на свойства подвесов, описанию информационных связей и обоснованию структур измерительных подвесов, определению погрешностей измерения силы и путей повышения точности измерения. Приведены структуры измерителей на основе активных, импульсных и резонансных электромагнитных подвесов с управляемой жесткостью, цифровой обработки информации в каналах и перестройкой параметров.
Основное внимание уделено рассмотрению подвесов как силокомпенсирующих систем автоматического регулирования с параметрическими обратными связями, их математических моделей, исследованию влияния характеристик магнитных материалов на свойства подвесов, описанию информационных связей и обоснованию структур измерительных подвесов, определению погрешностей измерения силы и путей повышения точности измерения. Приведены структуры измерителей на основе активных, импульсных и резонансных электромагнитных подвесов с управляемой жесткостью, цифровой обработки информации в каналах и перестройкой параметров.
В обзоре использованы литературные источники, в том числе авторские свидетельства и технические отчеты о научно-исследовательских работах, за последние 20 лет.
Обзор рекомендуется для специалистов по авиационно-космическому и морскому приборостроению, он также может быть полезен разработчикам бесконтактных опор, силокомпенсирующих первичных преобразователей, приборов для измерения параметров движения.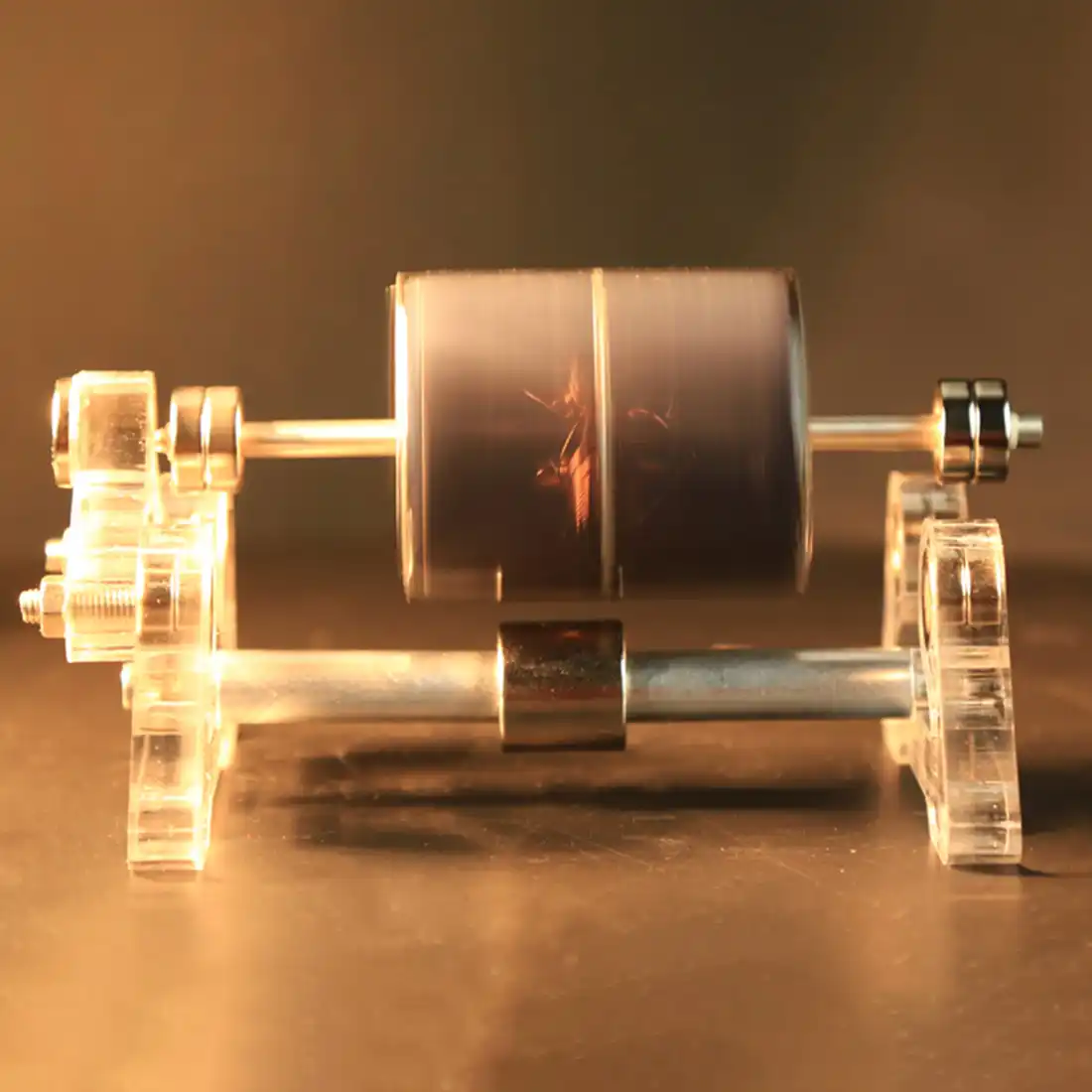
Оглавление
Введение
1 Электромагнитный подвес как силокомпенсирующая система автоматического регулирования
1.1 Сравнительная характеристика электромагнитных и электростатических подвесов с авторегулированием
1.2 Классификация электромагнитных подвесов с авторегулированием
1.3 Математическая модель электромагнитного преобразователя подвеса
1.4 Усилительно-преобразовательные блоки электромагнитных подвесов
1.5 Активные электромагнитные подвесы
1.6 Резонансные электромагнитные подвесы
2 Влияние параметров магнитных материалов на свойства электромагнитных подвесов
2.1 Математические модели перемагничивания магнитного материала с учетом гистерезиса
2.2 Поверхностный эффект и его влияние на силовые характерстики подвеса
2.3 Исследование работоспособности магнитных материалов в резонансных электромагнитных подвесах
3 Теоретические основы разработки измерительных электромагнитных подвесов
3.1 Анализ параметров подвеса с помощью направленных графов
3. 2 Связь между силой электромагнита и индукцией
2 Связь между силой электромагнита и индукцией
3.3 Методы измерения индукции
3.4 Использование индукции в качестве информационного параметра в измерительном электромагнитном подвесе
4 Структуры измерительных электромагнитных подвесов
4.1. Измерительные активные электромагнитные подвесы
8.3 Измерительный импульсный электромагнитный подвес
8.4 Особенности использования резонансного электромагнитного подвеса в измерительных структурах
5 Погрешности измерения силы
5.1 Обобщенная оценка погрешностей измерительного электромагнитного подвеса
5.2 Методические погрешности измерения силы
5.3 Инструментальные погрешности измерения силы
6 Способы повышения точности измерительных электромагнитных подвесов
6.1 Анализ путей снижения погрешностей измерительных электромагнитных подвесов
6.2 Подстройка измерительного подвеса по внешним факторам
6.3 Подстройка измерительного подвеса по внутренним параметрам
6.4 Управление жесткостью измерительного электромагнитного подвеса
Заключение
Литература
Магнитный подвес «Магнето» от GEFU серебряный, металл
Доставка и оплата
Срок доставки по Москве и области: при заказе со склада доставка на следующий день (при оформлении заказа до 15:00) или через день, в остальных случаях точная информация указана в карточке товара
Срок доставки в другие города: несколько рабочих дней. Точная информация указана в карточке товара
Точная информация указана в карточке товара
Способы оплаты: наличными при получении или на сайте банковской картой при оформлении заказа
Оплата товаров под заказ: 100% предоплата банковской картой
В случае полного отказа от заказа при курьере, оплачивается стоимость доставки.
Москва + в радиусе 10 км
Курьерская доставка:
| Физический вес, кг Сумма сторон, см | 0-5 | 5-15 | 15-30 | 30-200 | >200 |
|---|---|---|---|---|---|
| 80 | 299 | 399 | 499 | 999 | 1499 |
| 110 | 399 | 399 | 499 | 999 | 1499 |
| 140 | 499 | 499 | 499 | 999 | 1499 |
| 270 | 999 | 999 | 999 | 999 | 1499 |
| >270 | 1499 | 1499 | 1499 | 1499 | 1499 |
Доставка в пункты выдачи заказов:
| Физический вес, кг Сумма сторон, см | 0-5 | 5-15 | 15-30 | 30-200 | >200 |
|---|---|---|---|---|---|
| 80 | 199 | 299 | 399 | 799 | 1299 |
| 110 | 299 | 299 | 399 | 799 | 1299 |
| 140 | 399 | 399 | 399 | 799 | 1299 |
| 270 | 799 | 799 | 799 | 799 | 1299 |
| >270 | 1299 | 1299 | 1299 | 1299 | 1299 |
Курьерская доставка 10 — 30 км от Москвы
| Физический вес, кг Сумма сторон, см | 0-5 | 5-15 | 15-30 | 30-200 | >200 |
|---|---|---|---|---|---|
| 80 | 399 | 499 | 599 | 1199 | 1699 |
| 110 | 499 | 499 | 599 | 1199 | 1699 |
| 140 | 599 | 599 | 599 | 1199 | 1699 |
| 270 | 1199 | 1199 | 1199 | 1199 | 1699 |
| >270 | 1699 | 1699 | 1699 | 1699 | 1699 |
Курьерская доставка 30 — 100 км от Москвы
| Физический вес, кг Сумма сторон, см | 0-5 | 5-15 | 15-30 | 30-200 | >200 |
|---|---|---|---|---|---|
| 80 | 499 | 599 | 699 | 1399 | 1899 |
| 110 | 599 | 599 | 699 | 1399 | 1899 |
| 140 | 699 | 699 | 699 | 1399 | 1899 |
| 270 | 1399 | 1399 | 1399 | 1399 | 1899 |
| >270 | 1899 | 1899 | 1899 | 1899 | 1899 |
Доставка по России
Мы также доставляем заказы по всей России.
Точную стоимость и сроки доставки каждого товара Вы можете посмотреть в процессе оформления заказа после ввода адреса.
Почему электромагнитная система подвески автомобиля Bose так и не появилась на рынке
Bose — компания, наиболее известная своими высококачественными акустическими системами, — потратила три десятилетия на побочный проект по разработке системы активной подвески для автомобилей класса люкс. Эта система была увлечением покойного основателя компании Амара Боса. Несмотря на то, что в течение многих лет она оставалась тихой под кодовым названием Project Sound, в 2007 году г-н Боз сказал, что высокотехнологичная система подвески готова к коммерциализации. Jaguar, Mercedes, Honda и Ferrari проявили интерес к технологии, но ничего не произошло.Теперь новый генеральный директор Bose Боб Мареска раскрыл причину остановки проекта в интервью CNET.
Мареска был впервые нанят компанией Bose в 1980-х годах для работы инженером в проекте секретной подвески. Теперь, спустя 30 лет и несколько крупных промоушенов, Мареска объяснил, почему Project Sound так и не был реализован. Проект имел технический успех, но коммерческий провал, потому что уникальная система подвески была слишком тяжелой и дорогой для автопроизводителей, чтобы встраивать ее в автомобили. Тем не менее, как показано на видео выше, система великолепна.
Теперь, спустя 30 лет и несколько крупных промоушенов, Мареска объяснил, почему Project Sound так и не был реализован. Проект имел технический успех, но коммерческий провал, потому что уникальная система подвески была слишком тяжелой и дорогой для автопроизводителей, чтобы встраивать ее в автомобили. Тем не менее, как показано на видео выше, система великолепна.
Активная подвеска использует технологию динамиков для адаптации подвески к дорожным условиям, чтобы водители и пассажиры не чувствовали неровностей дороги. В нем используются электромагнитные двигатели, приводимые в действие усилителями мощности и переключателями, которые работают вместе, заставляя колеса подпрыгивать вверх и вниз над препятствиями, в то время как кузов автомобиля остается неподвижным.
Эта система использует собственное программное обеспечение, линейные электромагнитные двигатели и усилители мощности для управления каждым колесом.
Bose
К сожалению, специальный металл и мощный компьютерный процессор делают систему тяжелой и дорогой. В настоящее время технология, на разработку которой ушло много лет и долларов, используется в Bose Ride, специальном сиденье для коммерческих грузовиков, предназначенном для снижения утомляемости водителей и уменьшения болей в спине.
В настоящее время технология, на разработку которой ушло много лет и долларов, используется в Bose Ride, специальном сиденье для коммерческих грузовиков, предназначенном для снижения утомляемости водителей и уменьшения болей в спине.
Источник: CNET |
Фото MIKI Yoshihito (´ ・ ω ・)automotiveboseBose Project Sounдля электромагнитной подвески
Об авторе
(PDF) Электромагнитная система подвески: схема и моделирование
Аннотация — Целью данной статьи является создание системы управления
для системы подвески в автомобилях.Используются технология реализации контроллеров
и последующее экспериментальное исследование
. Настоящая работа
направлена на развитие активного, безопасного и
удовольствия от вождения, а также на обеспечение комфорта пассажиров
и хорошей изоляции от дорожного шума, ударов,
и вибраций. Программное обеспечение
позволяет моделировать и динамически моделировать систему управления.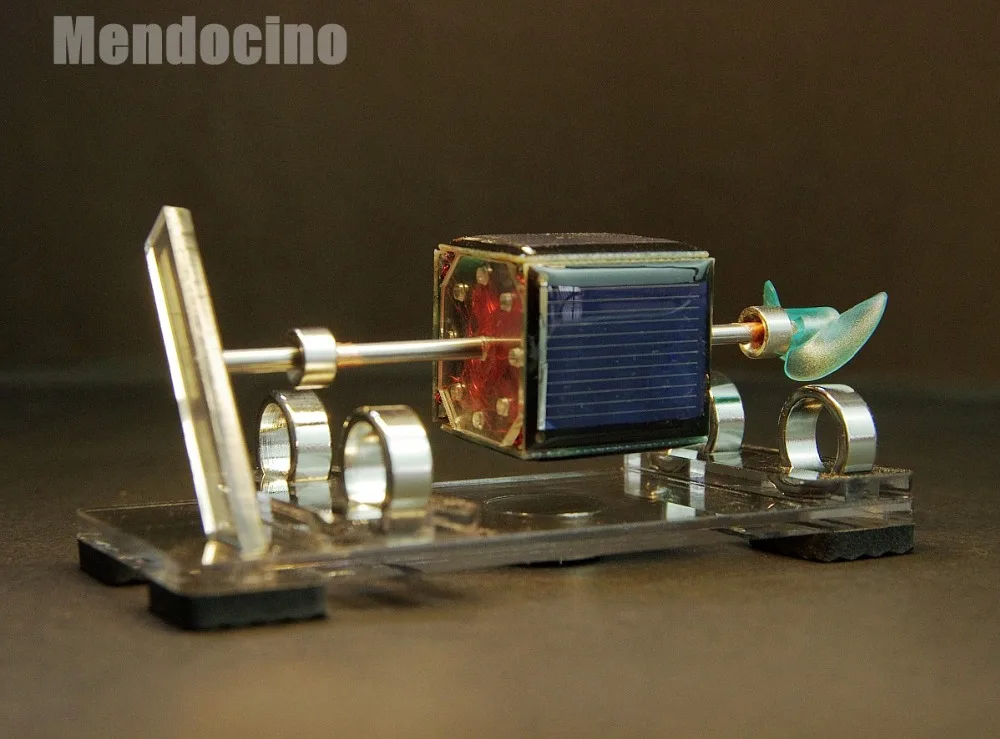 Моделирование
Моделирование
и аналитические методики используются здесь для анализа системы подвески
.Установлено, что активная система подвески
улучшает комфорт езды даже на резонансной частоте
. При вводе шага 0,08 м смещение подрессоренной массы
было уменьшено на 25%,
демонстрирует улучшение комфорта езды, а ускорение подрессоренной массы
уменьшилось на 89,93%. Ход подвески
был уменьшен на 74,64%. прогиб шины
уменьшился на 89,73%.
Ключевые слова: автомобили, системы управления, электромагнитные.
Подвесные системы.
I. ВВЕДЕНИЕ
Система подвески использовалась со времен древних египтян
в их экипажах и конных повозках в виде рессор
. К началу 19 века большинство британских конных экипажей
были оснащены пружинами; деревянные пружины в корпусе
легковых автомобилей с одной лошадью, чтобы избежать налогообложения, и стальные пружины
в более крупных транспортных средствах. Изначально автомобили
Изначально автомобили
разрабатывались как самоходные версии конных повозок.
Однако конные повозки, в которых эти части были прикреплены
к кузову кареты с помощью кожаных ремней, которые прикреплены к
четырем стойкам шасси, которые выглядели как перевернутый стол. С
корпус тележки подвешивался к шасси, система
получила название «подвеска».
Пропорционально-интегрально-производный (ПИД) регулятор был разработан
. Рисунок 1. Правила настройки Циглера-Николса
используются для определения пропорционального усиления, скорости сброса и времени производной
ПИД-регулятора.Экспериментальные исследования характеристик
разработанного активного регулятора подвески
продемонстрированы посредством сравнительного моделирования [2], [5].
Рис. 1. Активная система подвески
-Материалы и методы
— Электромагнитная подвеска:
Разрабатывается новый тип подвески автомобиля.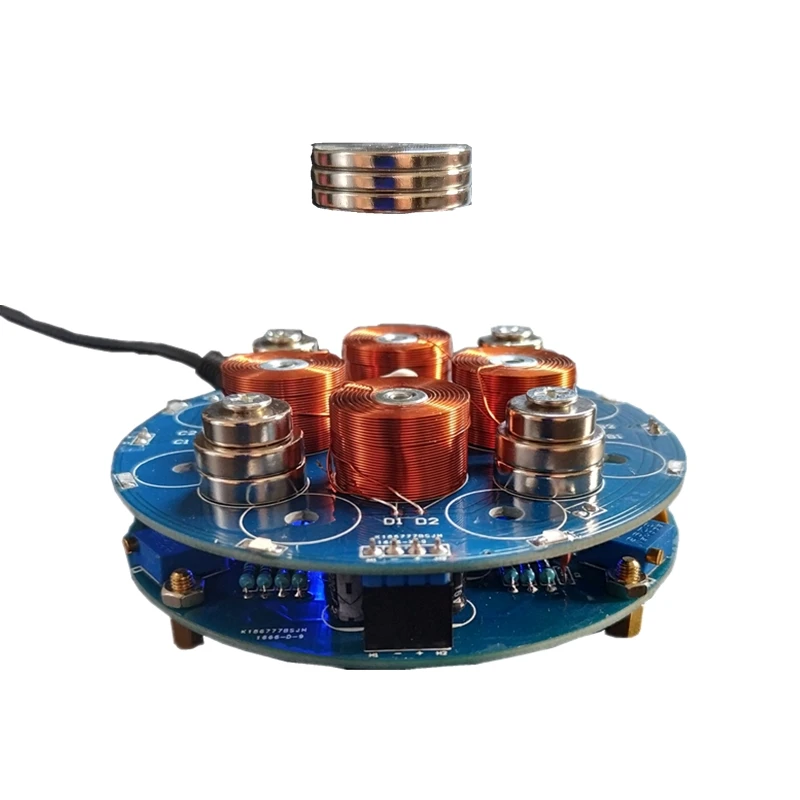 Они
Они
заменяют систему пружин и амортизаторов, используемых во всех
транспортных средств сегодня с линейными электромагнитными двигателями,
управляемых микропроцессорами и специальными математическими уравнениями.
Электромагнитная подвеска работает, постоянно обнаруживая
изменений дорожного покрытия и передавая эту информацию через
ЭБУ на внешние компоненты. Затем эти компоненты
воздействуют на систему, изменяя ее характеристики, регулируя жесткость амортизатора
, жесткость пружины и т.п., чтобы улучшить ходовые качества
, управляемость, отзывчивость. ЭБУ собирает,
анализирует и интерпретирует данные примерно за 10
миллисекунды.сила создается движущимся линейным электромагнитным полем
, действующим на проводники, которые поддерживают электромагнитное равновесие типа
с другими, чтобы нести вес
транспортного средства, сохраняя при этом желаемое положение тела
. В то же время, каждый электромагнитный линейный привод
служит отдельным амортизатором, устраняя необходимость в еще одном традиционном компоненте подвески
. Другими словами,
Другими словами,
, каждый электромагнитный привод действует как пружина
(с характеристиками демпфирования с переменной скоростью) и амортизатор с переменной скоростью
. Полностью активные подвески
используют электронный мониторинг состояния транспортного средства в сочетании со средствами
для воздействия на подвеску и поведение транспортного средства в реальном времени
для непосредственного управления движением автомобиля. Таким образом, если для экземпляра
используются безрамные, трехфазные, с постоянным магнитом, бесщеточные серводвигатели
вместо традиционных амортизаторов, тогда система
должна включать чрезвычайно сложные алгоритмы сервоуправления
и сверхбыструю отправку. и прием сигналов
по всему транспортному средству, так что линейные двигатели
мгновенно реагируют на условия движения, которые постоянно меняются,
Рис.2.
Система электромагнитной подвески: схема и
Моделирование
Сулейман Абу-Эйн и Сайел М. Файяд
Файяд
Кафедра машиностроения,
Факультет инженерных технологий,
P.O. Box 15008, Иордания, Прикладной университет Аль-Балка, Амман-Иордания
Активная электромагнитная система подвески может повысить ходовые качества автомобилей на 60 процентов — ScienceDaily
Исследователи из Технологического университета Эйндховена (TU / e, Нидерланды) разработали активную систему подвески. система электромагнитной подвески, способная повысить ходовые качества автомобилей на 60 процентов.Автомобили, оснащенные этой системой подвески, также более безопасны, поскольку они больше не кренится (раскачивается) в поворотах.
Система была разработана TU / e в партнерстве со шведской компанией SKF и недавно была установлена на тестовом автомобиле BMW, который будет показан на выставке AutoRAI в Амстердаме с 13 по 23 апреля 2011 года.
Демонстрация новой системы подвески начинается с яркой сцены: стандартный темно-синий BMW 530i, который прыгает вверх и вниз, как «лоурайдер» в видеоклипах в стиле хип-хоп. «Конечно, это не намерение», — объясняет Ир. Барт Гайсен, который работает над разработкой системы над докторской степенью. «Но это определенно показывает, на что способна система». Колеса автомобиля можно поднимать и опускать самостоятельно за доли секунды. И эта высокая скорость — одна из самых отличительных черт системы. Уже есть активные системы подвески, но они гидравлические, что означает, что их реакция недостаточно высока, чтобы компенсировать быстрые вибрации, вызванные неровностями дорожного покрытия.Новая система может сделать это эффективно, что объясняет лучшее качество езды.
«Конечно, это не намерение», — объясняет Ир. Барт Гайсен, который работает над разработкой системы над докторской степенью. «Но это определенно показывает, на что способна система». Колеса автомобиля можно поднимать и опускать самостоятельно за доли секунды. И эта высокая скорость — одна из самых отличительных черт системы. Уже есть активные системы подвески, но они гидравлические, что означает, что их реакция недостаточно высока, чтобы компенсировать быстрые вибрации, вызванные неровностями дорожного покрытия.Новая система может сделать это эффективно, что объясняет лучшее качество езды.
Машины скорой помощи без вибрации
Система, разработанная Gysen, была протестирована в прошлом году на испытательном стенде, имитирующем вибрацию дорожного покрытия всего на одном колесе. Это привело к увеличению ходовых качеств на 60 процентов. «Мы ожидаем, что этого повышенного комфорта можно достичь и с настоящим автомобилем», — объясняет Гайсен. «И, возможно, даже больше, когда все четыре колеса оснащены системой». В конечном итоге цель состоит в том, чтобы разработать более комфортабельные автомобили, которые также будут иметь более высокий уровень безопасности.Это связано с тем, что улучшается устойчивость на дороге, и автомобиль больше не катится на поворотах. Например, автомобиль, оснащенный этой системой подвески, с гораздо меньшей вероятностью перевернется в результате резких маневров рулевого управления, таких как слалом, участвующий в пресловутом «испытании на лося». Гизен также считает, что система будет привлекательной для использования в машинах скорой помощи. «Скорая помощь, оснащенная этой системой, сможет быстро и без неприятных вибраций дорожного покрытия доставить пациентов».
В конечном итоге цель состоит в том, чтобы разработать более комфортабельные автомобили, которые также будут иметь более высокий уровень безопасности.Это связано с тем, что улучшается устойчивость на дороге, и автомобиль больше не катится на поворотах. Например, автомобиль, оснащенный этой системой подвески, с гораздо меньшей вероятностью перевернется в результате резких маневров рулевого управления, таких как слалом, участвующий в пресловутом «испытании на лося». Гизен также считает, что система будет привлекательной для использования в машинах скорой помощи. «Скорая помощь, оснащенная этой системой, сможет быстро и без неприятных вибраций дорожного покрытия доставить пациентов».
Искробезопасный
Система заменяет обычный амортизатор в автомобиле, и сама имеет примерно такой же размер, как амортизатор.Он состоит из пассивной пружины, мощного электромагнитного привода, блока управления и батарей. Система изначально безопасна. Даже при отключении электроэнергии пружина и амортизаторы продолжат работать. Пассивная пружина в системе обеспечивает пружинение, а магниты обеспечивают пассивное поглощение магнитных ударов.
Пассивная пружина в системе обеспечивает пружинение, а магниты обеспечивают пассивное поглощение магнитных ударов.
Генерирующая мощность
По словам Гайзена, энергопотребление системы невелико. «Если вы установите эту систему подвески на все четыре колеса, пиковое потребление составит 500 Вт — половину того, что использует система кондиционирования воздуха.Гидравлические системы подвески потребляют в четыре раза больше мощности. А потребление нашей системы, вероятно, можно будет еще больше снизить за счет оптимизации. Это только первая версия ». Кроме того, система может даже использовать вибрацию от поверхности дороги для выработки электричества, которое подается обратно в аккумулятор.
Координация
В прошлом месяце система подвески была установлена на два колеса тестового автомобиля для практических испытаний и доработки. Одна из задач — согласовать поведение активной подвески на отдельных колесах.В настоящее время отдельные колесные системы все еще работают независимо. SKF, которая профинансировала докторское исследование Гайсена, а также запатентовала технологию, в настоящее время рассматривает вопрос о выпуске на рынок новой системы подвески.
SKF, которая профинансировала докторское исследование Гайсена, а также запатентовала технологию, в настоящее время рассматривает вопрос о выпуске на рынок новой системы подвески.
AutoRAI
Испытательный автомобиль, оснащенный новой системой подвески, будет представлен на автосалоне AutoRAI, который пройдет с 13 по 23 апреля в Амстердаме, на стенде HTAS Automotive Innovation под номером E.01 (Elicium, Auto 2.0). На стенде будет работать персонал, который сможет продемонстрировать автомобиль и новую систему подвески.
Ir. Барт Гайсен разработал электромагнитную пружинно-демпферную систему в группе TU / e «Электромеханика и силовая электроника» (кафедра электротехники) под руководством проф. Елена Ломонова. Гайсен планирует получить докторскую степень в Технологическом университете Эйндховена в 2011 году.
История Источник:
Материалы предоставлены Технологическим университетом Эйндховена . Примечание. Содержимое можно редактировать по стилю и длине.
Содержимое можно редактировать по стилю и длине.
маглев | Факты, работа и системы
maglev , также называемый поездом на магнитной подушке или поездом на магнитной подушке , плавающим транспортным средством для наземного транспорта, которое поддерживается либо за счет электромагнитного притяжения, либо за счет отталкивания.Маглевы были концептуализированы в начале 1900-х годов американским профессором и изобретателем Робертом Годдардом и американским инженером французского происхождения Эмилем Бачелет и находятся в коммерческом использовании с 1984 года, при этом некоторые из них работают в настоящее время, а в будущем планируется создать обширные сети.
Маглевы включают базовый факт о магнитных силах — например, магнитные полюса отталкиваются друг от друга, а противоположные магнитные полюса притягиваются друг к другу — для подъема, движения и направления транспортного средства по рельсам (или направляющим). Движение и левитация на маглеве могут включать использование сверхпроводящих материалов, электромагнитов, диамагнетиков и редкоземельных магнитов.
Движение и левитация на маглеве могут включать использование сверхпроводящих материалов, электромагнитов, диамагнетиков и редкоземельных магнитов.
Подробнее по этой теме
железная дорога: Маглев
В качестве альтернативы высокоскоростному рельсу на базе традиционных фланцевых колесных транспортных средств, технология магнитной левитации, или maglev , …
Электромагнитная подвеска (EMS) и электродинамическая подвеска (EDS)
В эксплуатации находятся два типа маглевов. Электромагнитная подвеска (EMS) использует силу притяжения между магнитами, присутствующими на боковых и нижних сторонах поезда, а также на направляющих, чтобы левитировать поезд.Вариант системы EMS, называемый Transrapid, использует электромагнит для снятия поезда с рельсов. Притяжение магнитов на нижней стороне транспортного средства, которые охватывают железные рельсы направляющей, удерживают поезд на высоте примерно 1,3 см (0,5 дюйма) над направляющей.
Системы электродинамической подвески (EDS) похожи на EMS во многих отношениях, но магниты используются для отталкивания поезда от рельсов, а не для их притяжения. Эти магниты переохлаждены и обладают сверхпроводимостью и обладают способностью проводить электричество в течение короткого времени после отключения электроэнергии.(В системах EMS потеря мощности отключает электромагниты.) Кроме того, в отличие от EMS, заряд намагниченных катушек направляющих в системах EDS отталкивает заряд магнитов на ходовой части поезда, так что он поднимается выше (обычно в диапазон 1–10 см [0,4–3,9 дюйма]) над направляющей. Поезда EDS медленно поднимаются, поэтому их колеса должны разворачиваться со скоростью менее 100 км (62 миль) в час. Однако после левитации поезд движется вперед за счет движения, обеспечиваемого катушками направляющих, полярность которых постоянно меняется из-за переменного электрического тока, питающего систему.
Получите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчас
Маглевы
Подпишитесь сейчас
Маглевыустраняют ключевой источник трения — трения колес поезда о рельсы — хотя они все равно должны преодолевать сопротивление воздуха. Отсутствие трения означает, что они могут развивать более высокие скорости, чем обычные поезда. В настоящее время технология магнитных левов позволяет производить поезда, которые могут путешествовать со скоростью более 500 км (310 миль) в час. Эта скорость вдвое выше, чем у обычного пригородного поезда, и сравнима с TGV (Train à Grande Vitesse), который используется во Франции, который движется со скоростью от 300 до 320 км (186 и 199 миль) в час.Однако из-за сопротивления воздуха маглевы лишь немного более энергоэффективны, чем обычные поезда.
Преимущества и затраты
Маглев имеет ряд других преимуществ по сравнению с обычными поездами. Они менее дороги в эксплуатации и обслуживании, поскольку отсутствие трения качения означает, что детали не изнашиваются быстро (как, например, колеса обычного железнодорожного вагона). Это означает, что эксплуатация поезда потребляет меньше материалов, поскольку детали не нужно постоянно заменять.Конструкция вагонов на магнитной подвеске и железной дороги делает сход с рельсов крайне маловероятным, а железнодорожные вагоны на магнитной подвеске могут быть построены шире, чем обычные железнодорожные вагоны, что дает больше возможностей для использования внутреннего пространства и делает их более комфортными для езды. Маглевы практически не загрязняют воздух во время работы , потому что топливо не сжигается, а отсутствие трения делает поезда очень тихими (как внутри, так и вне вагонов) и обеспечивает очень плавную езду для пассажиров. Наконец, магнитолевые системы могут работать на более высоких уклонах (до 10 процентов), чем традиционные железные дороги (ограниченные примерно 4 процентами или меньше), что снижает необходимость рытье туннелей или выравнивать ландшафт для размещения путей.
Это означает, что эксплуатация поезда потребляет меньше материалов, поскольку детали не нужно постоянно заменять.Конструкция вагонов на магнитной подвеске и железной дороги делает сход с рельсов крайне маловероятным, а железнодорожные вагоны на магнитной подвеске могут быть построены шире, чем обычные железнодорожные вагоны, что дает больше возможностей для использования внутреннего пространства и делает их более комфортными для езды. Маглевы практически не загрязняют воздух во время работы , потому что топливо не сжигается, а отсутствие трения делает поезда очень тихими (как внутри, так и вне вагонов) и обеспечивает очень плавную езду для пассажиров. Наконец, магнитолевые системы могут работать на более высоких уклонах (до 10 процентов), чем традиционные железные дороги (ограниченные примерно 4 процентами или меньше), что снижает необходимость рытье туннелей или выравнивать ландшафт для размещения путей.
Самым большим препятствием для развития систем магнитной подвески является то, что они требуют совершенно новой инфраструктуры, которая не может быть интегрирована с существующими железными дорогами и которая также будет конкурировать с существующими автомагистралями, железными дорогами и воздушными маршрутами. Помимо затрат на строительство, при разработке железнодорожных систем на магнитной подвеске необходимо учитывать то обстоятельство, что они требуют использования редкоземельных элементов (скандий, иттрий и 15 лантаноидов), восстановление и очистка которых может оказаться довольно дорогостоящим. Однако магниты, изготовленные из редкоземельных элементов, создают более сильное магнитное поле, чем магниты из феррита (соединения железа) или альнико (сплавы железа, алюминия, никеля, кобальта и меди), чтобы поднимать и направлять вагоны поезда по рельсам.
Помимо затрат на строительство, при разработке железнодорожных систем на магнитной подвеске необходимо учитывать то обстоятельство, что они требуют использования редкоземельных элементов (скандий, иттрий и 15 лантаноидов), восстановление и очистка которых может оказаться довольно дорогостоящим. Однако магниты, изготовленные из редкоземельных элементов, создают более сильное магнитное поле, чем магниты из феррита (соединения железа) или альнико (сплавы железа, алюминия, никеля, кобальта и меди), чтобы поднимать и направлять вагоны поезда по рельсам.
Системы на магнитной подвеске
За прошедшие годы было разработано несколько железнодорожных систем, использующих магнитную подвеску, большинство из которых работают на относительно небольших расстояниях. Между 1984 и 1995 годами в Великобритании была разработана первая коммерческая магнитолевая система как шаттл между аэропортом Бирмингема и ближайшей железнодорожной станцией, находящейся на расстоянии около 600 метров (около 1970 футов). Германия построила в Берлине маглев (M-Bahn), который начал работу в 1991 году, чтобы преодолеть брешь в системе общественного транспорта города, вызванную Берлинской стеной; тем не менее, в 1992 году, вскоре после сноса стены, M-Bahn была демонтирована.Всемирная выставка 1986 года (Expo 86) в Ванкувере включала в себя небольшой участок системы магнитной подвески в пределах выставочного центра.
Германия построила в Берлине маглев (M-Bahn), который начал работу в 1991 году, чтобы преодолеть брешь в системе общественного транспорта города, вызванную Берлинской стеной; тем не менее, в 1992 году, вскоре после сноса стены, M-Bahn была демонтирована.Всемирная выставка 1986 года (Expo 86) в Ванкувере включала в себя небольшой участок системы магнитной подвески в пределах выставочного центра.
Шесть коммерческих магнитолевых систем в настоящее время работают по всему миру. Один расположен в Японии, два — в Южной Корее и три — в Китае. В Айти, Япония, недалеко от Нагои, до сих пор действует система Linimo, построенная для Всемирной выставки 2005 года. Его длина составляет около 9 км (5,6 миль), на этом расстоянии имеется девять остановок, а скорость составляет около 100 км (62 мили) в час.Корейский Rotem Maglev проходит в городе Тэджон между выставочным парком Тэджон и Национальным музеем науки, на расстоянии 1 км (0,6 мили). Inch’n Airport Maglev имеет шесть станций и идет от международного аэропорта Inch’n до станции Yongyu, расположенной в 6,1 км (3,8 мили) от отеля. Самая длинная коммерческая система магнитной подвески находится в Шанхае; Он покрывает около 30 км (18,6 миль) и проходит от центра Шанхая до международного аэропорта Пудун. Линия является первым высокоскоростным коммерческим магнитным левом, работающим с максимальной скоростью 430 км (267 миль) в час.В Китае также есть две низкоскоростные магнитопроводы, работающие со скоростью 100 км (62 миль) в час. Маглев Чанша соединяет аэропорт этого города со станцией в 18,5 км (11,5 миль), а линия S1 пекинского метро имеет семь остановок на расстоянии 9 км (6 миль).
Самая длинная коммерческая система магнитной подвески находится в Шанхае; Он покрывает около 30 км (18,6 миль) и проходит от центра Шанхая до международного аэропорта Пудун. Линия является первым высокоскоростным коммерческим магнитным левом, работающим с максимальной скоростью 430 км (267 миль) в час.В Китае также есть две низкоскоростные магнитопроводы, работающие со скоростью 100 км (62 миль) в час. Маглев Чанша соединяет аэропорт этого города со станцией в 18,5 км (11,5 миль), а линия S1 пекинского метро имеет семь остановок на расстоянии 9 км (6 миль).
Япония планирует создать к 2027 году систему высокоскоростных магнитных левов на большие расстояния, Тюо Синкансэн, которая соединит Нагою с Токио на расстояние 286 км (178 миль) с продлением до Осаки (514 км [319 миль). ] из Токио) запланировано на 2037 год.Планируется, что Chuo Shinkansen будет путешествовать со скоростью 500 км (310 миль) в час и совершит путешествие Токио-Осака за 67 минут.
Сара Э. БослоУзнайте больше в этих связанных статьях Britannica:
железная дорога: Маглев
В качестве альтернативы высокоскоростным рельсам на основе традиционных колесных транспортных средств с фланцами технология магнитной левитации, или maglev , получила значительное внимание и исследования, хотя ее практическое применение было ограничено стоимостью, соображениями безопасности и удовлетворенностью.
с традиционными высокоскоростными системами.Автомобиль maglev …транспорт
перевозка, перемещение товаров и людей с места на место и различные средства, с помощью которых осуществляется такое перемещение. Рост способности — и потребности — перевозить большие количества товаров или людей на большие расстояния с высокими скоростями с комфортом и безопасностью…
Роберт Годдард
Роберт Годдард, американский профессор и изобретатель, общепризнанный отцом современной ракетной техники.
В 1919 году он опубликовал свой классический трактат «Метод достижения экстремальных высот».…
 с традиционными высокоскоростными системами.Автомобиль maglev …
с традиционными высокоскоростными системами.Автомобиль maglev … В 1919 году он опубликовал свой классический трактат «Метод достижения экстремальных высот».…
В 1919 году он опубликовал свой классический трактат «Метод достижения экстремальных высот».…(PDF) Активная электромагнитная система подвески для улучшения динамики автомобиля
1162 IEEE TRA NSACTI ONS ON VEH ICULAR TECHNOLOGY, VOL. 59, NO. 3, МАРТ 2010
Рис. 16. Интервал времени проведения измерений на дорогах и срабатывания электромагнита на бездорожье
на испытательной установке четверти автомобиля.
Состояние автомобиля.Характеристики взяты из измерений
на бездорожье и на бездорожье для пассивной системы подвески, и из
можно сделать вывод, что для ARC пиковая сила 4 кН и
RMS сила 2 кН (рабочий цикл 100%) необходимы для
передних приводов. Кроме того, необходимая пиковая мощность демпфирования
составляет около 2 кВт; однако среднеквадратичное значение демпфирующей мощности составляет
только 16 Вт при нормальной езде по городу. Максимальный предел
Максимальный предел
ходов отскока составляют 80 и 58 мм соответственно.Дорожные измерения
, которые имитируются на установке
на четверть вагона посредством электромагнитного срабатывания, хорошего отслеживания отклика
и измерения частотной характеристики трубчатого привода
, подтверждают динамические характеристики привода. Электро-
магнитная подвесная система.
ССЫЛКИ
[1] Д. Н. Уормли, К. М. Бауэр и Дж. Э. Бернард, «Оценка
Национальной администрации безопасности дорожного движения для оценки устойчивости к опрокидыванию
», Transp.Res. Board, Special Rep. 265, 2002.
[2] Electric Cars Europe. [Онлайн]. Доступно: http://www.ececars.nl/
[3] К. Чакир и А. Сабанович, «Конструкция электродвигателя для электромобилей
», в Proc. 9-е IEEE Int. Мастерская Adv. Motion Control, 2006,
, стр. 613–618.
[4] С. Зеттерстром, «Электромеханические модули рулевого управления, подвески, привода и тормозов
», Proc. 56-й IEEE VTC, 2002, т. 3. С. 1856–1863.
56-й IEEE VTC, 2002, т. 3. С. 1856–1863.
[5] Дж. Дж. Х. Паулидес, Л.Encica, E. A. Lomonova и
A. J. A. Vandenput, «Конструктивные соображения для полуактивной электро-магнитной подвесной системы
», IEEE Trans. Магн., Т. 42, нет. 10,
pp. 3446–3448, октябрь 2006 г.
[6] Дж. Ван, В. Ван, К. Аталлах и Д. Хоу, «Сравнительные исследования топологий линейных двигателей с постоянными магнитами
для активного транспортного средства. подвеска »
в Proc. IEEE VPPC, сентябрь 2008 г., стр. 1–6.
[7] Б. Л. Дж. Гайсен, Дж. Л. Г. Янссен, J.J. H. Paulides, E. A. Lomonova,
«Конструктивные аспекты активной электромагнитной системы подвески для
автомобильных приложений», IEEE Trans. Ind. Appl., Vol. 45, нет. 5,
pp. 1589–1597, Sep./Oct. 2009.
[8] А. Дж. Бенсон, «Морская болезнь», в Энциклопедии гигиены труда
и безопасности, под ред. Дж. М. Стеллмана, 4-е изд. Женева, Швейцария: Междунар. Labor
Office, 1998.
[9] Г. Р. Барнс и Б. Х. Ранс, «Движение головы, вызванное угловыми
колебаниями тела по осям тангажа и крена», Aviat.Космическая среда.
Мед., Т. 46, нет. 8, pp. 987–993, Aug. 1975.
[10] М. Страсбергер и Дж. Гулднер, «Динамический привод BMW: активная система билизаторов sta-
», IEEE Control Syst. Mag., Т. 24, вып. 4, pp. 28–29,
Aug. 2004, 107.
[11] W. D. Jones, «Easy ride: Bose Corp. использует технологию динамиков для создания адаптивной подвески
автомобилей», IEEE Spectr., Vol. 42, нет. 5, pp. 12–14,
May 2005.
[12] L. J. Smart, T. A.Стоффреген и Б.Г. Барди, «Визуально вызванное движение
болезнь, предсказанная постуральной нестабильностью», Физ. Факторы, т. 44, нет. 3,
pp. 451–465, 2002.
[13] LH Frank, JG Casali и WW Wierwille, «Эффекты визуального расстройства
задержки системы игры и движения на производительность оператора и его беспокойство
при вождении. симулятор »Гум. Факторы, т. 30, нет. 2, pp. 201–217,
Apr. 1988.
[14] Э. К. Реган и К. Р. Прайс, «Частота возникновения и серьезность
побочных эффектов погружения в виртуальную реальность», Aviat.Космическая среда. Мед.,
т. 65, нет. 6, pp. 527–530, июнь 1994.
[15] Ю. Ю, Г.Ч. Ли и С.А. Джонс, «Векция, компенсирующее колебание,
и болезнь симулятора», в «Достижения в профессиональной эргономике» и
Безопасность , Б. Дос и В. Каровски, ред. Амстердам, Нидерланды:
IOS, 1997, стр. 589–592.
[16] П. М. Галингер, «Морская болезнь — как помочь своим пациентам
избежать мучений во время путешествия», Постград. Мед., Т. 106, нет. 4, стр.177–184,
Oct. 1999.
[17] Дж. Р. Лакнер, «Морская болезнь», в Энциклопедии нейробиологии,
Г. Адельман и Б. Смит, ред., 3-е изд. Амстердам, Нидерланды:
Elsevier, 2003.
[18] I. Martins, J. Esteves, GD Marques и FP da Silva,
«Применимость линейных приводов с постоянными магнитами в автомобильных активных подвесках
», IEEE Пер. Veh. Technol., Т. 55, нет. 1. pp. 86–94,
Jan. 2006.
[19] S.Чжао и Ю. Ли, «Объединение информации с нескольких датчиков и фильтр strong track-
ing для оценки нелинейного состояния транспортного средства», Proc. IEEE Intell.
Транспортные средства, июнь 2009 г., стр. 747–751.
[20] Дж. Сиджс, З. Папп и П. ван ден Бош, «Оценка состояния движения транспортного средства
с использованием распределенного зондирования», в Proc. IEEE Intell. Транспортные средства Symp.,
Июнь 2008 г., стр. 458–463.
[21] Модуль Sachs ABC. [Онлайн]. Доступно: http://www.zfsachs.com
[22] B.Гайзен, Дж. Паулидес, Л. Энсика и Э. Ломонова, «Щелевой трубчатый привод с постоянным магнитом
для систем активной подвески», Proc. LDIA,
сентябрь 2009 г., стр. 292–295.
[23] А. Кручек, А. Стрибрский, «Полная модель автомобиля с активной подвеской —
Некоторые практические аспекты», Proc. IEEE ICM, 2004, стр. 41–45.
[24] Р. Кросс, «Роль центробежной силы в крене транспортного средства», Amer. J. Phys.,
,т. 67, нет. 5, pp. 447–448, 1998.
[25] P.Хсу, «Свойство рекуперации энергии электрических активных систем подвески»,
в Proc. 31-е заседание IECEC, август 1996 г., т. 3. С. 1899–1904.
[26] Г. Ф. Франклин, Дж. Д. Пауэлл, А. Эмами-Наейни, Управление с обратной связью динамических систем
. Энглвуд Клиффс, Нью-Джерси: Прентис-Холл, 2006.
Барт Л. Дж. Гайсен (S’07 – M’10) родился в 1984 году в
Билзене, Бельгия. Он получил степень бакалавра наук.
и M.Sc. получил степень в области электротехники
Технологический университет Эйндховена, Эйндховен,
Нидерланды, где он в настоящее время работает над докторской степенью
.Докторская степень в группе электромехаников
и силовой электроники.
Его исследовательский интерес — электромагнитные активные пенсионные системы
для автомобильных приложений.
Йоханнес Дж. Х. Паулидес (M’06) родился в 1976 году в
Ваалвейке, Нидерланды. Он повторно получил степень бакалавра инженеров
. степень от Technische
Hogeschool ’s-Hertogenbosch,’ s-Hertogenbosch,
, Нидерланды, в 1998 году и M.Phil. и к.т.н.
степени в области электротехники и электроники
от Университета Шеффилда, Шеффилд, U.К.,
,, 2000 и 2005 гг. Соответственно.
С 2005 года он был научным сотрудником
Эйндховенского технологического университета, Эйндховен,
Нидерланды, где он одновременно является ректором Di-
Paulides BV и Advanced Electromagnetics BV, которые являются небольшими и
средние предприятия, базирующиеся в Нидерландах, производящие электрические машины
и прототипы электромагнитных устройств. Его исследовательская деятельность охватывает все аспекты электрических машин
, особенно линейных и вращающихся машин с возбуждением от постоянных магнитов
для автомобилей и высокоточных приложений.
Разрешенное лицензионное использование ограничено: Технологический университет Эйндховена. Загружено 26 июля 2010 г. в 09:36:32 UTC с IEEE Xplore. Ограничения применяются.
Демонстрация электромагнитной автомобильной подвески
В декабре прошлого года на конференции «Будущее электромобилей» в Сан-Хосе представитель Нидерландского технологического университета Эйндховена представил исследование нового типа электромагнитной подвески транспортного средства, проводимое его учреждением.Теперь, когда на выставке AutoRAI в Амстердаме вот-вот появится тестовый автомобиль, оснащенный подвеской, университет опубликовал некоторые дополнительные сведения о технологии. Во-первых, утверждается, что общее качество езды автомобилей улучшается на 60 процентов.
Подвеска Eindhoven является не только электромагнитной, но и активной. Это означает, что она не только механически реагирует на неровности дороги, но и управляется бортовым компьютером. Этот компьютер получает данные от акселерометров и других датчиков автомобиля и соответствующим образом регулирует подвеску за доли секунды.Хотя в активной подвеске нет ничего нового (по крайней мере, для автомобилей), ранее она в основном интегрировалась в гидравлические системы. Однако, по мнению исследователей из Эйндховена, гидравлика не может реагировать так же быстро, как их электромагнитная система, и поэтому не может сравниться с плавностью ее движения.
Как и существующие системы активной подвески, эта система также должна сделать вождение более безопасным, поскольку, как сообщается, она не позволит автомобилям въезжать в повороты.
Прототип электромагнитной подвески, разработанный университетом Эйндховена для SKF
Примерно того же размера, что и обычный амортизатор, система состоит из пассивной пружины, электромагнитного привода, блока управления и батарей.Пружина — что вполне естественно — обеспечивает пружинящее действие, в то время как магниты обеспечивают пассивную амортизацию. Если батареи выйдут из строя, система по-прежнему будет работать как чисто механическая подвеска.
При пиковом потреблении 500 Вт подвеска использует около четверти мощности гидравлических систем. Он также продлевает срок службы батареи за счет использования дорожных вибраций для выработки электричества. Конструкторы считают, что с помощью доработок энергоэффективность подвески может быть улучшена еще больше.
Показатель улучшения плавности хода на 60% был получен, когда одно колесо, оснащенное системой, было установлено на лабораторном испытательном стенде, имитирующем дорожные условия. В прошлом месяце на тестовом автомобиле была установлена система на двух колесах для реальных дорожных испытаний. В настоящее время каждое колесо, оснащенное подвеской, действует независимо, поэтому исследователи сейчас разрабатывают системы, позволяющие отдельным узлам подвески взаимодействовать друг с другом и координировать свои действия.
Университет Эйндховена разработал систему в сотрудничестве со шведской компанией SKF в области мехатроники, которая запатентовала технологию и изучает возможности ее сбыта.
Адаптивное управление электромагнитной системой подвески с помощью HOPF Bifurcation
Магнитная подвеска типа EMS существенно нелинейна и нестабильна. Сложно разработать стабильный контроллер для магнитолевой системы, которая находится в условиях крупномасштабных возмущений и отклонений параметров. Теоретический анализ показывает, что это явление соответствует бифуркации HOPF в математической модели.В этой статье приводится адаптивный закон управления, который регулирует параметры ПИД-регулирования в соответствии с теорией бифуркации HOPF. Посредством идентификации левитирующей массы контроллер регулирует коэффициент обратной связи, чтобы увести систему подальше от точки бифуркации HOPF и поддержать стабильность системы магнитолевой подвески. Результат моделирования показывает, что регулировка параметра пропорционального усиления с использованием этого метода может расширить диапазон стабильности состояния магнитолевой системы и эффективно избежать самовозбуждающейся вибрации.
1. Введение
С успехом соединения с Шанхайским международным аэропортом Пудун в Китае в нашу жизнь вошло транспортное средство с магнитной левитацией (транспортное средство на магнитной подвеске) с помощью технологии электромагнитной подвески (EMS) [1, 2]. EMS обеспечивает немеханическую контактную силу подвески с помощью электромагнитов с контроллером воздушного зазора, реализованным через обратную связь по положению, скорости и ускорению. Классические теории управления предоставили большую часть правил проектирования для многих СЭМ, включая транспортное средство на магнитной подвеске [3, 4] и систему магнитной подвески и баланса [5].Однако, поскольку стратегии постоянного линейного управления быстро ухудшаются с увеличением отклонений от номинальной рабочей точки, вызванных значительными изменениями подвешенной нагрузки, сообщалось о некоторых подходах к проблеме обеспечения стабильной производительности при изменении рабочей точки. Был дан эталонный адаптивный контроллер для компенсации изменений полезной нагрузки и возмущений внешней силы [6]. Был разработан метод планирования усиления [7], в котором нелинейное соотношение сила / ток / воздушный зазор магнитной подвески последовательно линеаризуется в различных рабочих точках с подходящим контроллером, разработанным для каждой из этих рабочих точек.Некоторые другие методы также были развиты в [8–11].
Однако в упомянутых выше статьях не обсуждалось, как поступать в этом случае, когда масса левитирующей резко изменяется. Поскольку EMS по своей природе является нестабильной нелинейной динамической системой, вышеупомянутые методы не могут гарантировать ее стабильность при резком изменении массы, иногда левитирующей. Когда EMS становится нестабильной из-за резкого возмущения, она может производить вибрацию, в первую очередь соответствующую бифуркации HOPF нелинейного уравнения пространства состояний [12].Другими словами, при проектировании параметров контроллера EMS, если мы рассмотрим дополнительное ограничение, которое делает параметры контроллера всегда далеко от точек бифуркации HOPF, в то время как левитирующая масса изменяется, будет достигнут больший диапазон стабильного состояния. Тогда способность системы противодействовать резким помехам будет усилена. В данной статье исследуется, как спроектировать адаптивный контроллер с самонастройкой параметров в соответствии с указанным выше принципом.
2. EMS с одной степенью свободы Модель
EMS с одной степенью свободы схематично показан на рисунке 1.Он состоит из электромагнита, датчика воздушного зазора, контроллера DSP, драйвера тока и левитирующего объекта. Благодаря правильному алгоритму управления в DSP объект будет стабильно левитировать с определенным зазором.
Установите левитационный воздушный зазор с направлением вниз как, ожидаемый воздушный зазор, скорость изменения воздушного зазора, ускорение силы тяжести, масса левитируемого объекта, ток в электромагните, сопротивление электромагнита есть, а напряжение электромагнита в точке равновесия системы составляет.
Установите количество витков катушки электромагнита как, площадь полюсов электромагнита и проницаемость вакуума. Затем устанавливается как постоянная электромагнита, определяемая, и.
Предположим, что в системе действует следующий двухконтурный контроллер: где и — регулируемые параметры обратной связи контура зазора. — коэффициент пропорциональной обратной связи, — коэффициент дифференциальной обратной связи.
— коэффициент обратной связи по токовой петле.За счет правильной обратной связи по току постоянная времени электромагнита может быть значительно уменьшена. Таким образом, в полосе системы Ems передаточную функцию от напряжения к току электромагнита можно рассматривать как пропорциональную составляющую, и конструкция контроллера становится более удобной [4].
Тогда модель системы можно записать следующим образом [13]:
3. Системный анализ
Установка, и, точка равновесия переменных состояния может быть получена:
Набор.
Матрица Якоби системы в точке равновесия Собственный многочлен матрицы Якоби системы в точке равновесия равен Соответствующую таблицу Рауса можно вычислить, как в таблице 1.
Из таблицы Рауса легко узнать, что когда система (2) устойчива в точке равновесия.
Кроме того, существует бифуркация, когда или. На самом деле, это невозможно. Это означает, что бифуркация в системе происходит только тогда, когда.Далее мы покажем, что бифуркация — это бифуркация HOPF.
Когда существует пара чисто мнимых корней и отрицательный действительный корень. Чистые мнимые корни [14] где и.
Другой корень может быть получен вычислением [14]: куда .
На практике,; тогда .
Значит, в EMS существует бифуркация HOPF, когда. То есть система имеет периодические решения, что означает, что в этой точке есть самовозбуждающаяся вибрация.
Мы определяем область, в которой система стабильна, как где — левый полюс коэффициента пропорциональной обратной связи, — правый полюс, а
4. Конструкция параметров адаптивного контроллера
Конструкция параметров адаптивного контроллера заключается в выборе надлежащего коэффициента левитации воздушного зазора и коэффициента дифференциальной обратной связи, чтобы они удовлетворяли следующим условиям: (1); (2) и сохраняли определенное дальнее расстояние.
Состояние гарантирует стабильность.Условие гарантирует отсутствие бифуркации HOPF в системе.
В EMS левитирующая масса не всегда фиксирована. Согласно (8), (9) и (10), это функция левитирующей массы, и поэтому она будет скользить с изменяющейся массой. Если его удерживать неподвижным, он будет двигаться дальше или приближаться к нему, в то время как масса левитирует, изменяясь. Нарушение первого условия вызовет нестабильность системы, а нарушение второго условия вызовет самовозбуждающуюся вибрацию. Чтобы избежать этого, коэффициент пропорциональной обратной связи следует регулировать с изменением массы, которая левитирует, удерживается внутри и держится подальше от.
Чтобы обеспечить достаточную жесткость и избежать самовозбуждающейся вибрации, в этой статье коэффициент пропорциональной обратной связи помещен в середину интервала. То есть определяется по следующему уравнению:
Итак, необходимо постоянно и автоматически знать левитирующую массу; затем мы можем настроить коэффициент пропорциональной обратной связи так, чтобы и условие, и условие могли выполняться вместе. Но на самом деле левитирующую массу нелегко измерить напрямую.Чтобы преодолеть эту проблему, системная переменная должна быть найдена так, чтобы она могла отражать дисперсию левитирующей массы и могла быть измерена в реальном времени.
Как мы знаем, когда система достигает стабильного состояния, ток в электромагните, напряжение электромагнита и масса левитации удовлетворяют следующему уравнению: где — эквивалентная индукция электромагнита. Тогда можно представить следующее уравнение:
В (13) фиксированы ускорение свободного падения и постоянная электромагнита.Воздушный зазор левитации, сопротивление электромагнита и индукция электромагнита также постоянны. Напряжение электромагнита и ток в электромагните могут быть измерены датчиком. , то есть скорость изменения тока, можно рассчитать, используя ток.
Итак, левитирующую массу можно рассчитать по следующему уравнению:
То есть, мы можем получить дисперсию левитирующей массы из напряжения и тока электромагнита и получить масштаб дисперсии из дисперсии левитирующей массы.Затем коэффициент пропорциональной обратной связи может быть скорректирован своевременно, чтобы он мог одновременно удовлетворять как условию, так и условию.
5. Имитационное тестирование
У нас есть экспериментальное оборудование EMS, показанное на рисунке 2. В таблице 2 указаны его параметры.
Тогда согласно (8) имеем
Моделирование 1. Установить в середине; то есть, ; после того, как система проработает 40 секунд, левитирующая масса резко уменьшается на 15%, и можно получить ступенчатую реакцию системы, как показано на рисунке 3.
Из рисунка 3 мы знаем, что из-за резкого уменьшения левитирующей массы в момент времени 40 с, система через временный процесс регулирования возвращается в особое состояние, в котором есть очевидная самовозбуждающаяся вибрация.
Согласно (8), (9) и (10), из-за уменьшения левитирующей массы, скользит до 5356. А из-за фиксированного расстояние между и уменьшается до 5356, что приводит к сближению. Затем система производит самовозбуждающую вибрацию, как показано на рисунке 3.
Моделирование 2. После того, как система проработает 40 секунд, левитирующая масса резко уменьшается на 15%. Расчетное использование массы левитации (15) показано на рисунке 4, а коэффициент пропорциональной обратной связи, в то время как левитирующая масса изменяется в соответствии с теорией бифуркации HOPF, описанной в разделе 4, показан на рисунке 5. Переходная характеристика может быть получена, как показано на рисунке 6 в этом. кейс.
Из рисунка 6 мы знаем, что после того, как левитирующая масса резко уменьшается на 15%, система возвращается в стабильное состояние, и самовозбуждающаяся вибрация отсутствует.
Согласно предыдущему расчету, когда левитирующая масса уменьшается на 15%, сдвигается влево 5356. Согласно (12) напряжение электромагнита уменьшается на 7,8%, а в соответствии с (8), сдвигается влево 5356. Итак, нет изменения относительного расстояния между и.