Почему «роботы» с двумя сцеплениями скоро вытеснят все остальные коробки
А где еще они есть?
Нужно сказать, что идея использования мультидискового сцепления в «роботах» все сильнее захватывает умы производителей. Свои наработки есть у Mercedes: на SLS устанавливается 7-ступенчатая SpeedShift, коробка размещается в «хвосте» автомобиля и связана с двигателем карбоновым карданным валом. BMW в январе 2008-го представила M3 с коробкой производства Getrag, с двойным сцеплением от BorgWarner.
Позднее такая коробка появилась на BMW Z4 и доступна к заказу на купе 335i. FIAT/Chrysler в 2009-2010 году запустил в производство сухую, двухдисковую коробку с индексом С635, с предельной нагрузкой 350 ньютонов на метр. Этот «робот» вживили в AlfaRomeo MiTo. PSA Peugeot Citroën уставливает DCT-коробки на Peugeot 4007 и Mitshubishi Outlander, производства Getrag. Появление многодисковых коробок анонсировали и китайские автопроизводители BYD и QOROS.
Достоинства и недостатки
К бесспорным достоинствам мультидисковых АКПП относятся: быстродействие, минимальная задержка при переключении передач, экономия топлива, непрерывность тяги, возможность осуществления ручного управления.
К недостаткам можно отнести сложность конструкции и, как следствие, высокую стоимость. Для двигателей с тягой более 350 Н*м (+/- 50 Н*м) коробку приходится делать с мокрым картером, то есть со смазкой, что еще сложнее и дороже.
Преселективные коробки достаточно хорошо себя показали при размеренной езде и при ускорении, а вот при движении в городском трафике, из пробки в пробку, плавность переключения может вызывать отдельные вопросы.
Альтернативы
«Робот» с одним сцеплением
Роботизированная коробка передач по сути — обычная механическая коробка, в которой процессом переключения передач руководит электроника. Относительно недорогая коробка дешевле классического «автомата». Плюс тут, пожалуй, один — меньше рычагов управления. По сравнению с «механикой» ниже скорость переключения и выше расход топлива, а по сравнению с «автоматом» плохая плавность хода, то есть переключения обычно сопровождаются ощутимыми толчками.
Относительно недорогая коробка дешевле классического «автомата». Плюс тут, пожалуй, один — меньше рычагов управления. По сравнению с «механикой» ниже скорость переключения и выше расход топлива, а по сравнению с «автоматом» плохая плавность хода, то есть переключения обычно сопровождаются ощутимыми толчками.
Классический «автомат» (то, что все привыкли называть АКПП)
Он состоит собственно из гидротрансформатора и набора планетарных передач. Шестерни располагаются по окружности ведущего вала, по типу планет вокруг Солнца, и находятся в постоянном зацеплении. Блокируя ту или иную пару шестерней, можно менять передаточное отношение, скорость вращения выходного вала. Гидротрансформатор выполняет роль сцепления между двигателем и трансмиссией. С той лишь разницей, что отсутствует жесткая кинематическая связь. Передачи переключаются плавно, но и потери мощности на проскальзывании велики, отчего страдает динамика разгона и расход топлива.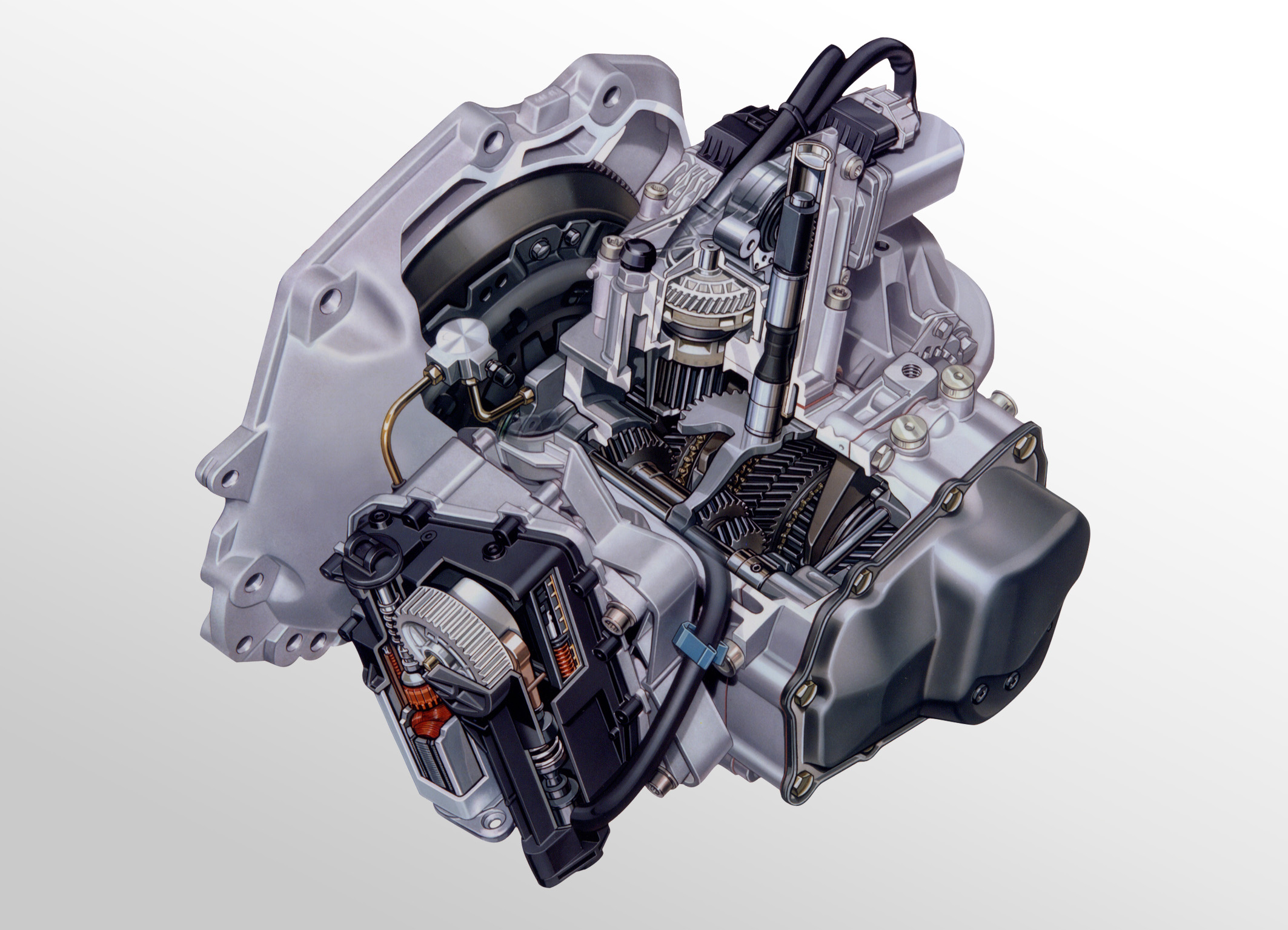
Вариатор
Вариатор считается бесступенчатой трансмиссией. В любой коробке передач чем больше пар из ведомых и ведущих шестерней (передач), тем лучше. Это позволяет максимально эффективно использовать возможности двигателя в сочетании с топливной экономичностью. В идеале таких пар должно быть бесконечное множество. Создать бесконечную коробку передач, конечно, невозможно, но есть альтернативное решение.
её отличие от автоматической, плюсы и минусы
Тяговые характеристики двигателей внутреннего сгорания и их приспособляемость к нагрузке недостаточны для прямого привода. Для адаптации используются разнообразные типы коробок перемены передач, которые позволяют изменить частоту вращения в достаточно широком диапазоне.
Помимо этого, такой механизм обеспечивает возможность движения задним ходом, длительной остановки автомобиля с работающим силовым агрегатом.
Коробка передач робот оснащается автоматом для управления работой устройства в заданном режиме с учетом нагрузки и других условий движения. Процессом руководит электронный блок, запрограммированный определенным образом.
Процессом руководит электронный блок, запрограммированный определенным образом.
Водитель осуществляет выбор алгоритма и задает его при помощи селектора, кроме того, он может перенимать управление работой механизма и производить переключения как на обычной механике.
Использование роботизированных коробок обеспечивает водителю максимально комфортные условия. Нет необходимости отвлекаться и терять время на переключения передач, а заложенные в процессор программы обеспечивают (в зависимости от условий движения) максимальную экономию топлива.
Большинство ведущих автопроизводителей, и АвтоВАЗ в их числе, широко используют коробки передач такого типа на транспортных средствах разных классов.
Что такое коробка передач робот
В настоящее время существует множество разнообразных конструкций механизмов автомобильных трансмиссий. Для ответа на вопрос: коробка передач робот — что это такое?, следует разобраться в ее устройстве, изучить принцип работы и проанализировать достоинства и недостатки. Практически любой сложный механизм имеет свои плюсы и минусы, устранение которых невозможно без коренной переделки системы.
Практически любой сложный механизм имеет свои плюсы и минусы, устранение которых невозможно без коренной переделки системы.
По своей сути роботизированная коробка является логическим развитием традиционной механической. В ней функции управления переключением передач автоматизированы и контролируются электронным блоком. Помимо этого процессор дает команду на исполнительный механизм сцепления для разобщения двигателя и трансмиссии при перемене передаточного числа.
Роботизированная коробка работает в комплексе с иными элементами трансмиссии. Автоматизированное управление согласуется с работой сцепления, предназначенного для обеспечения переключений.
Устройство и принцип работы
За все время развития автомобилестроения предпринимались множественные попытки упростить управление трансмиссией. Первые удачные конструкции роботизированных коробок передач, пошедшие в серию, появились только после оснащения машин процессорами. Все попытки автоматизировать управление при помощи электромеханических и гидравлических устройств не дали положительных результатов.
Они оказались слишком ненадежными и не обеспечивали приемлемой скорости переключения. Еще одним недостатком такого рода коробок была излишне высокая сложность и, как следствие, запредельная стоимость.
Решить все технические проблемы стало возможным только с появлением компактных и недорогих процессоров и датчиков, контролирующих режимы работы двигателя и трансмиссии.
Конструкция
Многие производители автомобилей самостоятельно занимались разработкой данного класса механизмов. Это обеспечило достаточно большое разнообразие конструкций коробок передач роботов, тем не менее, можно выделить в них общие элементы:
- электронный блок управления;
- механическая коробка передач;
- сцепление фрикционного типа;
- система управления переключением передач и муфтой.
Нередко функции электронного блока выполняет бортовой компьютер, контролирующий работу системы питания и зажигания в силовом агрегате. Процессор устанавливается вне картера коробки и соединяется с нею кабельными системами. Особое внимание при этом уделяется защите соединений, используются специально разработанные уплотнители. Нередко контактные группы покрываются тонким слоем золота для предотвращения окисления.
Особое внимание при этом уделяется защите соединений, используются специально разработанные уплотнители. Нередко контактные группы покрываются тонким слоем золота для предотвращения окисления.
За основу роботизированных коробок обычно берутся хорошо себя зарекомендовавшие устройства. Так, компания Mercedes-Benz при изготовлении агрегата Speedshift использовала АКП 7G-Tronic, вместо гидротрансформатора использовали многодисковое сухое сцепления фрикционного типа.
По аналогичному пути пошли и баварские автомобилестроители из BMW, оснастив шестиступенчатую механическую коробку автоматизированной системой управления.
Обязательным элементом, обеспечивающим работу коробки, является механизм сцепления. В случае с роботизированным устройством применяется конструкция фрикционного типа с одним или несколькими дисками. В последние годы появились трансмиссии с двойным механизмом сцепления, работающими параллельно. Такая конструкция обеспечивает передачу крутящего момента от двигателя без прерывания.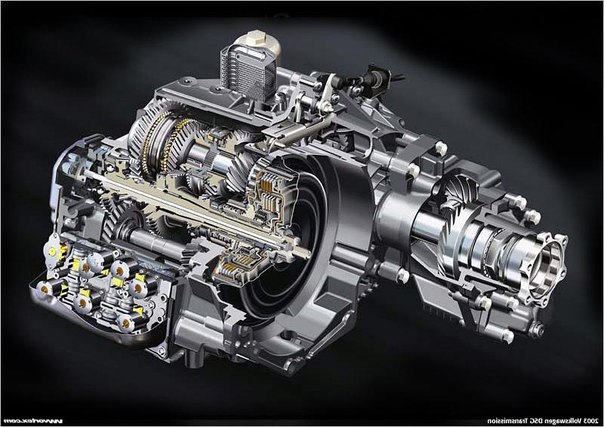
| Тип трансмиссии | С одним сцеплением | С двумя сцеплениями |
| Audi R-Tronic | + | |
| Audi S-Tronic | + | |
| Alfa Romeo Selespeed | + | |
| BMW SMG | + | |
| Citroen SensoDrive | + | |
| Ford Durashift | + | |
| Ford Powershift | + | |
| Lamborghini ISR | + | |
| Mitsubishi Allshift | + | |
| Opel Easytronic | + | |
| Peugeot 2-Tronic | + | |
| Porsche PDK | + | |
| Renault Quickshift | + | |
| Toyota MultiMode | + | |
| Volkswagen DSG | + |
Системы управления работой сцепления и переключением передач бывают двух видов: с электрическим или гидравлическим приводом. Каждый из вариантов имеет свои положительные и отрицательные стороны. Возможны комбинации из названных выше способов управления коробкой, позволяющие максимально использовать достоинства обеих конструкций и свести к минимуму их недостатки.
Каждый из вариантов имеет свои положительные и отрицательные стороны. Возможны комбинации из названных выше способов управления коробкой, позволяющие максимально использовать достоинства обеих конструкций и свести к минимуму их недостатки.
Электрический привод сцепления использует сервомоторы, которые обеспечивают минимальное энергопотребление. Отрицательным моментом является крайне низкое время переключения передач (в пределах от 300 мс до 500 мс), что приводит к рывкам и повышенным нагрузкам на детали трансмиссии.
Гидравлические приводы работают значительно быстрее, это делает возможным оснащение такими коробками даже спортивных автомобилей. На суперкаре Ferrari 599GTO время переключения составляет всего – 60 мс, а у Lamboghini Aventador и того меньше – 50 мс. Такие показатели обеспечивают данным машинам высокие динамические характеристики при сохранении плавности движения.
Принцип действия
Для того, чтобы понять как работает роботизированная коробка передач, следует получить представление об алгоритме работы ее механизмов.
Водитель запускает двигатель, выжимает педаль тормоза и переводит селектор в определенное положение. Привод сцепления разрывает поток мощности, а исполнительный механизм коробки производит подключение выбранной передачи.
Водитель отпускает тормоз и плавно увеличивает обороты, автомобиль начинает движение. В дальнейшем все переключения производятся в автоматическом режиме, при этом учитываются заданный режим и данные от датчиков. Управление механизмом осуществляется процессором в соответствии с выбранным алгоритмом. При этом у водителя имеется возможность вмешиваться в работу коробки.
Видео — роботизированная КПП (робот):
Полуавтоматический режим роботизированной трансмиссии аналогичен функции ручного управления автоматической коробки — Tiptronic. В таком случае водитель при помощи рычага селектора или переключателей установленных на рулевой колонке производит переключения передач с понижением или повышением. Отсюда исходит и другое название роботизированной коробки – секвентальная.
Трансмиссия такого типа получает все большее распространение на автомобилях. При этом наблюдается следующее разделение: коробками с электрическими сервомоторами комплектуются бюджетные модели. Ведущие автопроизводителя разрабатывают и выпускают серийно следующие типы механизмов:
- Citroen – SensoDrive;
- Fiat — Dualogic;
- Ford — Durashift EST;
- Mitsubishi — Allshift;
- Opel — Easytronic;
- Peugeot – Tronic;
- Toyota – MultiMode.
Для более дорогих моделей производятся коробки с гидравлическим приводом:
- Alfa Romeo — Selespeed;
- Audi — R-Tronic;
- BMW — SMG;
- Quickshift от Renault.
Самая продвинутая по показателям роботизированная коробка ISR (Independent Shifting Rods) устанавливается на суперкары от компании Lamborghini.
Отличие роботизированной коробки передач от автоматической
Развитие и невысокая стоимость электронных блоков управления сделали возможным их применение на серийных моделях машин. Они имеют разные виды трансмиссии и возникает закономерный вопрос — в чем разница между коробкой передач роботом и автоматом? Если таковые отличия существуют, то какой вид из них будет лучше отвечать требованиям водителя и на какие характеристики следует обратить внимание при выборе автомобиля.
Они имеют разные виды трансмиссии и возникает закономерный вопрос — в чем разница между коробкой передач роботом и автоматом? Если таковые отличия существуют, то какой вид из них будет лучше отвечать требованиям водителя и на какие характеристики следует обратить внимание при выборе автомобиля.
Разница между роботизированной коробкой и автоматом состоит в конструкции сцепления. Вместо гидротрансформатора в ней используется одно- или многодисковое сухое сцепление фрикционного типа.
В редукторе, как в механике, ведущие и ведомые шестерни находятся в постоянном зацеплении и задействуются они при помощи специальных муфт. Для уравнения угловых скоростей используются синхронизаторы.
Видео — тест драйв Лада Приора с роботом АМТ:
В автоматических коробках преимущественно используются редукторы планетарного типа и сложная система управления их функционированием. В первом и втором варианте выбор передаточного отношения определяется автоматикой. Это освобождает водителя от необходимости отслеживать режимы работы двигателя и производить переключения.
В первом и втором варианте выбор передаточного отношения определяется автоматикой. Это освобождает водителя от необходимости отслеживать режимы работы двигателя и производить переключения.
В сравнении автоматической коробки с роботом, лидером по такому показателю, как экономичность, является второе устройство. В сухом сцеплении механические потери значительно ниже, нежели у гидротрансформатора.
С другой стороны, автомат лучше обеспечивает плавность движения и езда в таком автомобиле более комфортная. Еще одним недостатком такого типа трансмиссии является дороговизна ремонта, который может выполняться только высококвалифицированными специалистами в условиях техцентра.
При выборе между роботизированной коробкой и автоматом следует принимать все вышеперечисленные факторы. Для недорогих бюджетных моделей существенными являются стоимость автомобиля и издержки на его содержание. При покупке элитных автомобилей такие вопросы обычно не имеют особого значения. Для водителя разницы в управлении автоматом или роботом практически нет.
Роботизированная коробка передач плюсы и минусы
Сложные системы, к каковым относятся и автомобильные трансмиссии, имеют вполне определенные достоинства и недостатка. Ниже приведен анализ плюсов и минусов в конструкции и эксплуатации роботизированной коробки передач. При этом в расчет принимаются динамические, стоимостные и некоторые другие характеристики агрегата.
К перечню положительных сторон коробки передач с роботизированным управлением можно отнести следующее:
- Высокая надежность механизма редуктора, проверенного длительной эксплуатацией.
- Применение сухого сцепления фрикционного типа способствует снижению потерь и уменьшению расхода топлива.
- Небольшое количество эксплуатационной жидкости – трансмиссионного масла порядка 3-4 литров, против – 6-8 литров у вариатора.
- Высокая ремонтопригодность роботизированной коробки (фактически в качестве ее основы используется хорошо известная механика).
- Автоматика повышает ресурс сцепления до 45 – 55 % по сравнению с традиционным управлением педалью.

- Наличие полуавтоматического режима, позволяющего водителю вмешиваться в работу агрегата при движении в сложных дорожных условиях на подъеме или в пробке.
.jpg)
Достоинства КПП «робот» очевидны, что способствует повышению популярности данного типа трансмиссии на автомобилях разного класса. Усилиями инженеров и конструкторов агрегат постоянно совершенствуется, его характеристики улучшаются.
Видео — как работает роботизированная коробка передач на Лада Приора:
Тем не менее, у роботизированной коробки передач имеются и некоторые минусы:
- Невозможность перепрошивки процессора и задания иного алгоритма управления с целью повышения динамических характеристик автомобиля.
- Невысокая скорость перемены передач у коробок с электрическими сервоприводами, которые невозможно исправить без переделки всей конструкции.
- Возможность пробуксовки сцепления и перегрева механизма при движении на низкой скорости в горку или в городской пробке. Опытные водители рекомендуют в таком случае использовать режим Tiptronic.
- Частые рывки при автоматическом переключении передач, сброс газа перед данной операцией или равномерный режим движения, позволит снять остроту проблемы.
 Опытные водители рекомендуют в таком случае использовать режим Tiptronic.
Опытные водители рекомендуют в таком случае использовать режим Tiptronic.У робота есть целый ряд преимуществ перед иными видами трансмиссий и некоторые недостатки. Такой тип механизма рекомендуется водителям со спокойной манерой управления автомобилем.
Для любителей прокатиться с ветерком такая коробка будет слишком задумчивой. Все имеющиеся минусы механизма своими силами устранить невозможно, поэтому к его особенностям следует просто приспособиться.
В целом коробка передач робот заслужила положительные отзывы автовладельцев. Особенно отмечаются большой ресурс работы, высокая надежность и её неприхотливость.
По некоторым отзывам покупателей Датсун Он-До можно отметить, что они с удовольствием бы купили этот автомобиль, укомплектованный роботом.
Как подобрать масло для автомобиля можете прочитать в статье.
Жидкая резина (https://voditeliauto.ru/stati/tyuning/zhidkaya-rezina-dlya-avto.html) для покраски автомобиля
Видео — нюансы работы роботизированной коробки передач:
Может заинтересовать:
Сканер для самостоятельной диагностики автомобиля
Добавить свою рекламу
Сравнить стоимость ОСАГО для своего авто
Добавить свою рекламу
Выбрать видеорегистратор: незаменимый гаджет для водителя
Добавить свою рекламу
Некоторые водители предпочитают видеорегистратор в виде зеркала
Добавить свою рекламу
РКПП сломалась: признаки неисправности
У роботизированных коробок передач (РКПП) всегда были критики среди автолюбителей и некоторых профессионалов, сетующих на ненадежность и недолговечность эксплуатации этих агрегатов. Но эксперты MotorPage.
 Ru готовы поспорить. Недаром ведь роботы все активнее используются в конструкциях машин ведущими автопроизводителями Европы, Америки и Азии.
Ru готовы поспорить. Недаром ведь роботы все активнее используются в конструкциях машин ведущими автопроизводителями Европы, Америки и Азии.Как и все коробки передач РКПП имеет свои минусы. Поэтому для того, чтобы трансмиссия не доставила неприятностей в самый неподходящий момент, водителю авто с робитизированой КП необходимо изучить возможные неисправности агрегата. Это позволит избежать потенциальных проблем с роботом в процессе повседневной эксплуатации.
Наиболее частые неисправности РКПП
В принципе, любые поломки, которые случаются с роботом, можно разделить на две основные группы. Первая – проявившиеся в процессе повседневной эксплуатации механические повреждения. Обнаружение износа на ранней стадии дает возможность восстановить агрегат с минимальными финансовыми затратами.
Вторую группу составляют неисправности, вызванные сбоем в работе ЭБУ и иного электронного оборудования (датчики, контрольные лампочки и пр.).
Ниже приведены основные признаки неисправности роботизированной трансмиссии, проявление любого из них – повод для срочных мер (диагностики и оперативного устранения):
- На приборной панели загорелась контрольная лампочка, сигнализирующая о неисправности КПП.
- Обнаружена утечка масла из коробки.
- Во время движения автомобиля при работе трансмиссии слышны посторонние шумы.
- Затруднено или невозможно переключение передач с высших на низшие и наоборот.
- Автомобиль при включенной скорости и отпущенной педали тормоза не трогается с места.
- Сцепление «пробуксовывает»: при нажатии водителем педали газа автомобиль не разгоняется или набирает скорость крайне медленно.
- Трансмиссия самовольно переключается (происходит выбивание передачи) в нейтральное положение, в результате чего машина останавливается.

Полезный совет: для диагностики и адаптации работы РКПП автовладельцам следует обращаться в СТО через каждые 20-30 тыс. км пробега.
Что такое адаптация робота
Это специальный процесс «обучения» коробки передач, который заключается в точечной настройке работы сцепления. Данная процедура обеспечивает правильность и точность переключения скоростей. Результат – повышение уровня комфорта при управлении автомобилем.
Основные причины поломки роботизированной трансмиссии:
- Износ деталей, узлов и отдельных компонентов коробки вследствие нерегулярного, некачественного обслуживания агрегата.
- Нарушение установленных правил эксплуатации автомобиля. Робот не любит агрессивный стиль, буксировку, езду по бездорожью, а также длительное движение по трассе на повышенных скоростях (что приводит к перегреву сцепления).
Правильное управление роботом
Эксперты Моторпейдж подготовили ряд полезных советов (небольших хитростей), которые помогут владельцам авто с РКПП обрести уверенность за рулем и полный контроль над транспортным средством:
- Если предстоит преодолеть затяжной подъем, то необходимо заблаговременно:
— Активировать ручной режим управления
— Перевести автомобиль на пониженную скорость - Чтобы эффективно разогнать машину до требуемой скорости, на педаль газа лучше нажимать максимум на половину хода (более плавно, без вдавливания в пол).
- Робот не любит длительные стоянки с нажатой педалью тормоза более 1 минуты. Поэтому, например, в пробках или на светофоре нужно переключить коробку на нейтральный режим (N).
- Движение следует осуществлять только при полном включении сцепления.
- При регулярных остановках перед светофором или в медленно продвигающемся потоке рекомендуется активировать ручной режим «М» и перейти на 1 передачу.

Подведем итог
При некотором сходстве, которое можно отметить у РКПП с другими трансмиссиями, управление роботом все же имеет свои характерные особенности, которые важно учитывать. Соблюдение требований к обслуживанию ТС с роботизированной коробкой передач является залогом надежности эксплуатации последних и безопасности движения на дороге в целом.
Лучшие коробки передач выбрали в Китае
Лучшие коробки передач по итогам года выбрал китайский Институт оценки автомобилей. Насколько объективно ранжирование, судить не беремся. Но ведущие китайские СМИ о нем написали, в жюри входят признанные академики и президент Всемирной федерации автомобильных инженеров. Да и проводится премия уже в третий раз. Интересно, что ее называют уникальной. Как информируют местные СМИ, это единственный в мире отбор трансмиссий, появившийся «в ответ на тенденцию развития автомобильной промышленности Китая».
Но ведущие китайские СМИ о нем написали, в жюри входят признанные академики и президент Всемирной федерации автомобильных инженеров. Да и проводится премия уже в третий раз. Интересно, что ее называют уникальной. Как информируют местные СМИ, это единственный в мире отбор трансмиссий, появившийся «в ответ на тенденцию развития автомобильной промышленности Китая».
***
Итак, в числе лучших названы 10-ступенчатая автоматическая коробка передач Honda 10AT и 8-диапазонный «автомат» ZF 8HP51. В Китае их устанавливают на кроссовер GAC Acura RDX и седан BMW Brilliance 3 Series.
— По сравнению со старой коробкой передач 6AT, эта 10AT имеет высокую эффективность, низкую внутреннюю инерцию, отличные рабочие характеристики, высокую энергоемкость и меньший вес. Глобальная коробка передач 10AT отличается превосходным качеством, отлично справляется с ежедневной ездой, а также позволяет ссбросить 4 передачи сразу, — комментируют «автомат» Honda журналилисты Auto.
 Ifeng
IfengНа местных машинах, как пишет портал Sohu, классических «автоматов» почти не осталось. Они уступили место роботизированной трансмиссии и бесступенчатым вариаторам. Тем важнее успех 8-ступенчатой коробки Shengrui SR 8AT380-F, устанавливаемой на FAW Pentium T99. Причем это первый агрегат 8AT, интеллектуальные права на который принадлежат именно Китаю.
На фото: коробка передач 7DCT Great Wall Motor, устанавливаемая на Haval F7 и F7x.
Среди «роботов» «фольксвагеновские» давно получили недобрую славу. Однако, как считает жюри, «в связи с постоянным развитием в последние несколько лет, прошлые проблемы в основном были устранены». А потому в топ-10 вошел робот Volkswagen DQ500 – тот самый, который мы называем просто DSG-7.
— Сегодняшний DQ500 — плавное переключение передач, меньше отказов и высокая эффективность, — пишут коллеги
Жюри назвало «носителем» коробки выпускаемый на СП с FAW Audi Q3. Но в Китае, как и везде, ей оснащают также Volkswagen Tiguan, Skoda Kodiak и Audi TT.
***
На фото: Герхард Хеннинг, главный инженер Honeycomb Etron Transmission System компании Great Wall Motors.
А дальше – еще интереснее. В топ-10 вошел и «робот» Honeycomb Drive 7DCT, который представлен на Haval F7. Причем второй год кряду! И, кстати, Great Wall и его инженеры во главе с немцем Герхардом Хеннингом сейчас работают над 9-дипазонным «роботом», совместимым с гибридной технологией.
В десятке также отмечены «роботы» Qisheng Power 7WDCT и Getrag 7DCT300. Им оснащаются минивэны GAC GM6 и кроссовер Chery Tiggo 8. К нам скоро приедет «старший» MPV бренда из Гуанчжоу – GN8. Но ему положен только горячо любимый нашими потребителями классический «автомат». А «восьмерка» в России продается исключительно с вариатором. Впрочем, немецкая трансмиссия Getrag 7DCT300 известна нашим потребителям по некоторым моделям BMW.
Что касается вариаторов, то здесь вне конкуренции оказался малоизвестный агрегат от General Motors, работающий на SAIC-GM Buick Angola GX
Отдельно выделяются лучшие так называемые гибридные коробки передач. Их в списке две. Это Honda E-CVT на гибридной версии Honda Accord, выпускаемой на совместном заводе с GAC, и Geely 7DCT390H. Эту трансмиссию ставят на купе-кроссовере FY11 PHEV и других гибридах марки.
Их в списке две. Это Honda E-CVT на гибридной версии Honda Accord, выпускаемой на совместном заводе с GAC, и Geely 7DCT390H. Эту трансмиссию ставят на купе-кроссовере FY11 PHEV и других гибридах марки.
Если вы нашли ошибку или хотите что-то сообщить редакции сайта, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter
Роботизированная коробка передач
Можно сказать, что роботизированная коробка передач занимает промежуточное положение между механической и автоматической трансмиссиями. Идея создания «робота» заключалась в том, чтобы в одной коробке передач сочетались бы комфорт, надежность и экономичность с точки зрения топлива. При этом роботизированная коробка должна была стоить намного дешевле классического «автомата». Как показывает практика, обе цели в итоге были достигнуты.
По сути, роботизированная коробка передач является «эволюцией» обычной механической трансмиссии. Устройство и принцип работы «механики» довольно простой. Главными составляющими элементами являются первичный (ведущий) и вторичный (ведомый) валы. На ведущий вал передается крутящий момент от двигателя. Ведомый вал преобразовывает крутящий момент и передает его на передние или задние колеса в зависимости от типа привода автомобиля.
Главными составляющими элементами являются первичный (ведущий) и вторичный (ведомый) валы. На ведущий вал передается крутящий момент от двигателя. Ведомый вал преобразовывает крутящий момент и передает его на передние или задние колеса в зависимости от типа привода автомобиля.
На каждом из валов присутствуют шестерни. На ведущем валу они жестко закреплены, а на ведомом свободно вращаются. Именно поэтому, когда коробка передач находится в нейтральном положении, ведущие колеса не получают крутящий момент.
На автомобиле с обычной механической коробкой передач, водитель сначала выжимает сцепление, тем самым отсоединяя первичный вал от мотора. После этого, с помощью рычага коробки на вторичном валу начинают двигаться и перемещаться синхронизаторы, которые не позволяют муфте заблокировать шестерню, пока их скорости вращения не станут одинаковыми. Когда это условие выполнено, синхронизатор жестко блокирует шестерню выбранной передачи на вторичном валу. Чтобы крутящий момент сначала попал на ведомый вал, а от него на главную передачу и ведущие колеса, необходимо включить сцепление.
Но если механической трансмиссией управляет водитель, т.е. он включает и выключает сцепление, выбирает необходимую передачу, то в роботизированной коробке все эти функции выполняет электроника, которая состоит из входных датчиков, электронного блока управления и исполнительные механизмы.
Основная функция входных датчиков заключается в постоянном контроле основных параметров коробки передач. Полученная датчиками информация далее передается в электронный блок управления, который взаимодействует с различными системами автомобиля, такими как ABS, ESP, отслеживает обороты двигателя, скорость движения. Кроме этого, в блок заложена программа управления исполнительными механизмами. На основе полученных данных, электронный блок дает команды исполнительным механизмам, которыми являются сервоприводы – актуаторы.
Как только от электронного блока поступает команда на включение передачи, один сервопривод выжимает сцепление, второй передвигает муфту и включает выбранную передачу. Сразу после включения передачи первый сервопривод плавно отпускает сцепление. Таким образом, водителю не нужно выжимать педаль сцепления, да ее собственно и нет, так как все делает электроника.
Таким образом, водителю не нужно выжимать педаль сцепления, да ее собственно и нет, так как все делает электроника.
Большинство «роботов» имеют два режима работы. В автоматическом режиме все команды, касающиеся работы сцепления и включения необходимой в данный момент передачи, поступают от электронного блока управления. В ручном режиме, водитель самостоятельно переключает передачи.
Недостаток роботизированной коробки передачПри смене передач в автоматическом режиме «робот» надолго прерывает идущую к колесам мощность от двигателя. Причем такие разрывы достаточно продолжительны во времени, чтобы водитель успел их заметить и ощутить.
Чтобы полностью исключить такие провалы или хотя бы существенно сократить время, затрачиваемое на переключение передач, в начале 1980-х годов была разработана роботизированная коробка передач с двойным сцеплением — DCT (dual clutch transmission). Самым известным представителем подобной трансмиссии является коробка DSG, которая применяется на автомобилях Volkswagen, Audi и др.
Роботизированная коробка передач, все плюсы и минусы правильного выбора
На чтение 6 мин. Просмотров 372
Роботизированная коробка передач — достойный выбор автовладельцев, сочетающий в себе надежность «механики» и удобство «автомата».
Прогресс не стоит на месте, а желание человека сделать свой быт более удобным, подталкивает его на все новые изобретения. Стараясь облегчить жизнь водителя по многочисленным пробкам, производители автомобилей постоянно совершенствуют свои детища, применяя всевозможные новшества. Вот и к механической коробке передач на автомобиле придумали автоматическое сцепление. Сложив совместно понятия автомат и механика, конструкторы получили устройство под названием роботизированная коробка передач, совместившее в себе плюсы и минусы обоих агрегатов.
Роботизированная коробка передачУстройство роботизированной коробки
Многие автовладельцы полагают, что роботизированная коробка представляет собой обычный автомат с какими-то особенностями. Но это не так. За основу конструкции разработчики взяли механическую коробку, более надежную, чем автоматическая, добавив к ней специальные устройства, отвечающие за выжим сцепления с переключением передач.
Но это не так. За основу конструкции разработчики взяли механическую коробку, более надежную, чем автоматическая, добавив к ней специальные устройства, отвечающие за выжим сцепления с переключением передач.
В обычной механике переключением передачи с выжимом сцепления заведует непосредственно водитель. Он самостоятельно, ориентируясь на дорожную ситуацию используя педаль сцепления с рычагом КПП, выбирает необходимую передачу согласно времени ее включения. Изобретатели решили исключить водителя из этой цепи, доверив все действия автоматике и компьютеру. Установив узлы-актуаторы, они сделали возможным автоматическое переключение роботизированной коробки, основой которой осталась механика.
Роботизированная механическая коробка передач, совместила положительные моменты постой механики и автомата — топливную экономичность, простоту ремонта и прочее с возможностью езды в автоматическом режиме без использования педали сцепления. При этом она сохранила возможность ручного управления при помощи рычага или подрулевых переключателей по принципу Типтроника.
Принцип работы
Коробка робот работает при помощи узлов-актуаторов. Получая информацию о скорости движения, оборотах двигателя, датчиков ABS и ESP с бортового компьютера и действуя через свою механическую часть, они выжимают сцепление, перемещают синхронизаторы в коробке, выбирая необходимую передачу. Сервопривод, ответственный за сцепление, приняв необходимую команду, рассоединяет первичный вал с двигателем. В это время второй сервопривод, выбрав нужную передачу, включает ее. После включения первый актуатор восстанавливает сцепление, и автомобиль продолжает движение.
Устройство роботизированной коробки передачСервоприводы, которые имеет робот, могут быть двух видов — электрические и гидравлические. Электрический представляет собой шаговый электродвигатель, перемещающий через редуктор свою исполнительную часть. Гидравлический привод воздействует через гидроцилиндр, получающий команды от электронного блока управления. Поэтому его еще называют электрогидравлическим.
Плюсы и минусы роботизированной коробки передач
- Коробка робот, выполненная на базе механики, обладает высокой надежностью по сравнению с автоматом и вариатором;
- Рабочий объем роботизированной коробки значительно меньше автоматической, и, значит, меньше количество используемого масла;
- Сцепление робота имеет увеличенный на 30 процентов ресурс;
- Почти все модификации имеют функцию переключения передач вручную по принципу Типтроника на автомате;
- Робот дешевле при производстве и ремонте по сравнению с вариаторной и автоматической коробками;
- Роботизированная коробка передач весит намного меньше, чем автоматическая, что дает ей преимущество для установки на малолитражные автомобили;
- Позволяет снизить расход топлива при равных условиях по сравнению с использованием всех остальных видов коробок передач.
Помимо достоинств робот имеет следующие недостатки:
- Коробка передач робот с электрическим сервоприводом обладает значительной задержкой переключения, достигающей 2-х секунд, которая вызывает дискомфорт при разгоне и динамичной езде;
- При использовании гидравлического привода применяется тормозная жидкость, которая постоянно находится под давлением, ускоряя процесс переключения до 0,05 секунды. Но гидравлический привод существенно дороже в устройстве, он повышает энергонагруженность мотора, являясь уделом дорогих автомобилей или спорткаров;
- На обычном роботе отсутствует возможность адаптации под стиль езды водителя. Если автомат может подстроиться, то робот поддерживает только один стиль, который установлен как прошивка в блоке управления.
 Но гидравлический привод существенно дороже в устройстве, он повышает энергонагруженность мотора, являясь уделом дорогих автомобилей или спорткаров;
Но гидравлический привод существенно дороже в устройстве, он повышает энергонагруженность мотора, являясь уделом дорогих автомобилей или спорткаров;Преселективная коробка передач. Движение в верном направлении
Из-за своих недостатков коробка переключения передач робот была встречена первыми покупателями довольно негативно. Основная претензия была в том, что робот работает с рывками во время движения. Но конструкторы, видя перспективу конструкции в ее простоте и дешевизне, не отказались от производства, продолжив поиски решения.
Для исправления ситуации, с целью избежать задержек переключения, производители предложили использовать коробку с двумя независимыми сцеплениями. Такое решение позволило полностью избавиться от рывков и задержек, увеличив динамику автомобиля, добавив комфорт водителю с пассажирами.
Первыми, кто начал серийно выпускать такие устройства, были Ауди и Фольксваген, начавшие устанавливать коробки DSG и S-Tronic на свои автомобили с 2003 года.
Двойное сцепление дало возможность включать последующую передачу при уже включенной передаче, переходя на нее без перерыва в работе коробки, сохранив тягу в полном объеме. Поэтому другое название коробки с двойным сцеплением — преселективная, что означает предварительно выбранная.
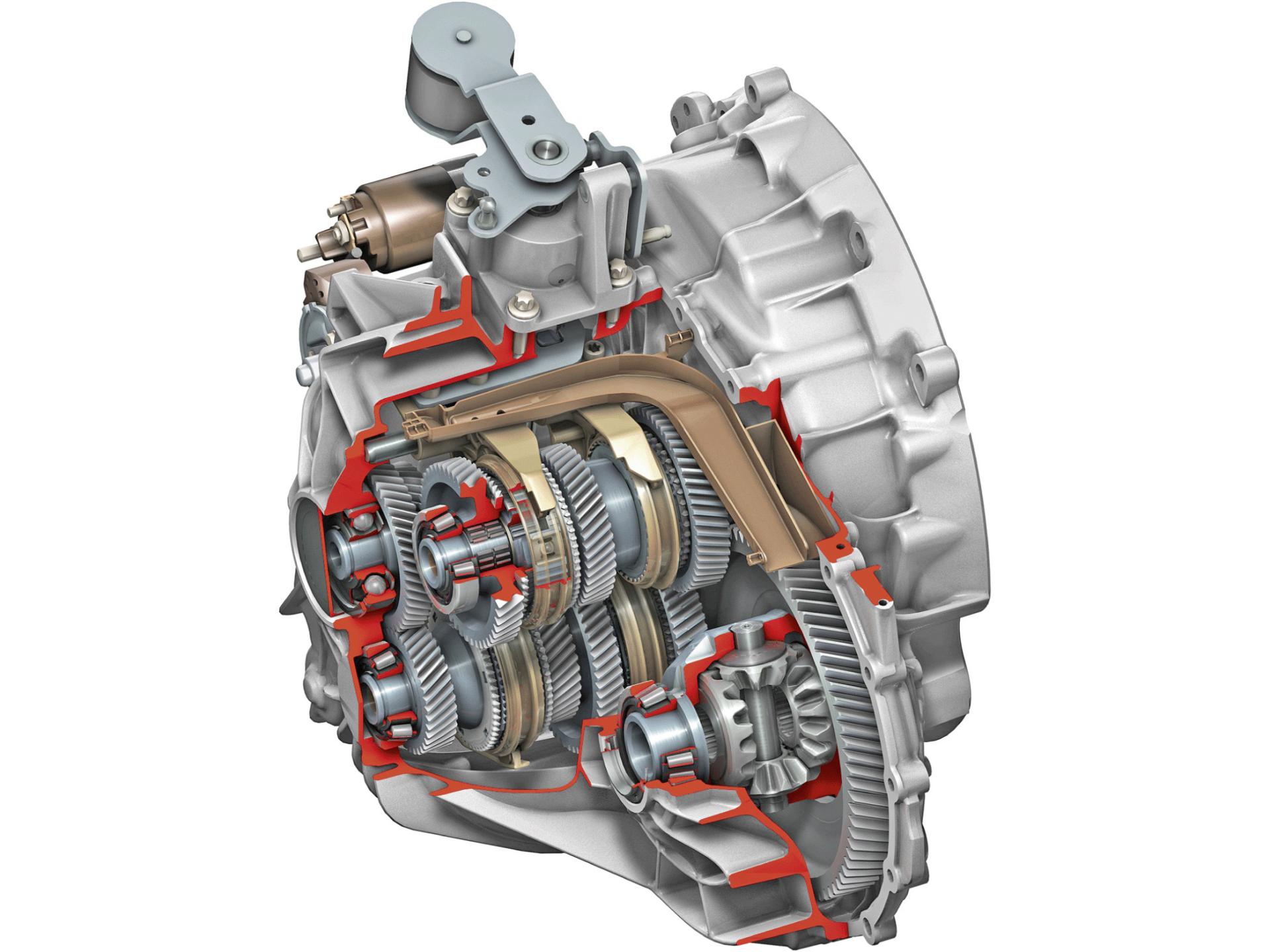
Если обычная коробка в устройстве имеет по одному первичному и вторичному валу, то такая получила в свою конструкцию их по два, предназначенных для четных и нечетных передач. При этом первичные валы вставлены один в другой по принципу матрешки, соединяясь с двигателем каждый отдельным многодисковым сцеплением.
При включении первой передачи на одном из вторичных валов в начале движения замыкается первое сцепление, автомобиль трогается. Умная электроника, понимая, что дальше должна быть вторая замыкает следующую шестерню на другом вторичном валу, но второе сцепление остается при этом разомкнутым, не внося конфликта в работу коробки. Как только необходимая скорость будет достигнута, произойдет одновременное выключение первого сцепления с включением второго. И так далее. При торможении процесс аналогичный, только в обратную сторону. Получается, что у такой коробки одновременно включены две передачи, что еще раз подтверждает ее название преселективная.
Как только необходимая скорость будет достигнута, произойдет одновременное выключение первого сцепления с включением второго. И так далее. При торможении процесс аналогичный, только в обратную сторону. Получается, что у такой коробки одновременно включены две передачи, что еще раз подтверждает ее название преселективная.
Скорость переключения преселективной коробки робота очень высока, превышающая по своим показателям скорости работы некоторых спортивных автомобилей. Например, робот серийного Гольфа имеет скорость переключения 8 миллисекунд, что меньше времени моргания глаза, а у Феррари Энзо роботизированная коробка переключается за 150 миллисекунд. Почувствуйте разницу, как говорят.
Достоинства и недостатки
Совместив лучшее от всех разработок, коробки передач с двойным сцеплением стали экономичнее и быстрее обычных механических. При этом они более комфортны для пассажиров, чем другие. Обладая малыми габаритами, роботы предпочтительнее в использовании для малолитражных автомобилей по сравнению с автоматическими коробками.
Но несмотря на обилие плюсов, есть значительные минусы. Недостатками преселективной коробки является ее сложность ремонта при высокой стоимости производства. До недавнего времени также была проблема при передаче большого крутящего момента, но сейчас она уже решена.
Подводя итоги
И сегодня многие именитые производители, такие как Ауди, Фольксваген, Опель, Фиат, и даже Порше признали перспективность этого направления, все больше склоняясь к использованию роботов в массовом производстве. Учитывая все положительные моменты при удешевлении производства, роботизированные коробки скоро полноценно войдут в жизнь автомобилистов, значительно потеснив механику с автоматом.
Чем отличается коробка автомат от робота и что такое робот
Современные автомобили оборудуются разными типами коробок передач и потребителю особенно при покупке своей первой машины бывает тяжело сделать правильный выбор среди этого разнообразия трансмиссий.
Поэтому в этой статье попробуем понять, чем отличается коробка автомат от робота, именно этот вопрос волнует многих будущих автовладельцев.
Отличие робота от автомата
Коробка автомат. Как вы знаете, в состав автоматической коробки передач входят два основных узла — это гидротрансформатор и редуктор. Гидротрансформатор обеспечивает плавное и безрывковое переключение передач, по сути, он работает вместо сцепления, которое есть на машинах с механической коробкой передач.
Редуктор автомата состоит из определённого набора шестерёнок, они находятся в зацеплении и образуют несколько ступеней: 4, 5, 6 и даже 8.
Из-за особенностей конструкции, автоматическая коробка передач исходя от оборотов мотора и нагнетания масляного давления сама переключает ступени (скорости), без вмешательства водителя. Благодаря такому переключению скоростей, электроника используется по минимуму.
КПП робот что это? Если сказать просто, то на механическую коробку передач поставили блок управления, который состоит из гидропривода и сервопривода (электронный узел). Вот этот блок, без вмешательства человека, заведуют сцеплением и переключением передач.
Вот этот блок, без вмешательства человека, заведуют сцеплением и переключением передач.
Коробка робот
Принцип работы робота как у механики, только всё происходит автоматически — гидравлика с электронным управлением всё сделает сама.
Плюсы и минусы автомата и робота
Чтобы лучше понять, чем отличается автоматическая коробка передач от роботизированной, давайте рассмотрим их эксплуатационные характеристики.
1. АКПП значительно снизила нагрузку на водителя при управлении автомобилем, особенно это заметно при движении в городских условиях. Современные автоматические коробки передач (адаптивные) способны даже подстраиваться под каждого водителя, под его стиль езды. Также, автомату свойственно мягкое и незаметное переключение скоростей.
Есть у автоматической коробки передач и минусы — это повышенный расход топлива, особенно в городе и ремонт автомата, который иногда случается, выльется в приличную сумму.
2. Робот относится к механике, значит обслуживание и ремонт будет дешевле, чем у автомата. Расход топлива у автомобиля с коробкой роботом приравнивается к МКПП, а в условиях города даже ниже, что не может не радовать. Ещё, роботы кушают масла по меньше, чем автоматы.
Расход топлива у автомобиля с коробкой роботом приравнивается к МКПП, а в условиях города даже ниже, что не может не радовать. Ещё, роботы кушают масла по меньше, чем автоматы.
Роботы передают крутящий момент от мотора к колёсам автомобиля без существенных потерь, чего не скажешь об автомате. Большой плюс роботизированной коробки в том, что она поддерживает ручное переключение скоростей, чего нет у многих автоматов.
Есть у робота и минусы — это медленное переключение скоростей и толчки с рывками в работе коробки, это случается довольно часто, если водитель очень сильно давит на педаль газа. Также, в городской черте во время стоянок необходимо рычаг селектора ставить в положение «нейтраль».
А зачем так делать, можете узнать в этом видео, где рассказано о коробке робот.
Подведём итоги, чем отличается автомат от робота:
- робот — это механическая коробка передач с блоком управления, автомату присуща своя конструкция;
- при переключениях передач автомат выигрывает у робота по скорости и плавности переключений;
- у робота есть ручное переключение, а у многих автоматов подобная функция отсутствует;
- коробка робот потребляет топлива и масла меньше, чем автомат;
- обслуживание и ремонт роботизированной коробки дешевле, чем автоматической коробки.
Заключение. Моё мнение: робот — это тёмная лошадка, от которой можно ожидать неприятных сюрпризов. Я выбираю автомат, он изучен и предсказуем в работе, тем более, новые автоматические коробки с большим набором передач приближаются уже по расходу топлива к механике и также, эти автоматы могут подстраиваться под каждого водителя.
Кто не согласен с моей точкой зрения, может поделиться в комментариях.
Загрузка…: роботы — на пути к успеху | Национальное географическое общество
1. Используйте велосипед, чтобы объяснить основы снаряжения.
Покажите предоставленную фотографию шестерни или покажите ее классу. Спросите: Кто-нибудь может сказать мне, что это такое и для какой цели? Объясните, что это шестерня, и шестерни используются для увеличения или уменьшения силы, увеличения или уменьшения скорости или для передачи или изменения направления движения.
Спросите: Кто-нибудь может сказать мне, к чему подключены педали на типичном велосипеде? Объясните, что педали обычно подключаются к самой большой передаче рядом с передней частью. Покажите изображение велосипеда. Спросите: Что связывает эту большую шестерню с другой шестерней на велосипеде? (Цепь соединяет шестерни.) Скажите ученикам, что шестерни, соединенные цепью, передают мощность от педали к заднему колесу. Итак, когда человек крутит педаль на велосипеде, энергия, которую он или она прилагает, превращается в энергию, которая движет велосипед вперед. По возможности покажите классу настоящий велосипед или еще раз картинку с велосипедом. Предложите студентам указать на шестерни, цепь и педали и понаблюдать, как все они взаимосвязаны внутри велосипеда.
Покажите изображение велосипеда. Спросите: Что связывает эту большую шестерню с другой шестерней на велосипеде? (Цепь соединяет шестерни.) Скажите ученикам, что шестерни, соединенные цепью, передают мощность от педали к заднему колесу. Итак, когда человек крутит педаль на велосипеде, энергия, которую он или она прилагает, превращается в энергию, которая движет велосипед вперед. По возможности покажите классу настоящий велосипед или еще раз картинку с велосипедом. Предложите студентам указать на шестерни, цепь и педали и понаблюдать, как все они взаимосвязаны внутри велосипеда.
Спросите: Кто-нибудь крутил педали велосипеда в гору? На ровной поверхности? Что проще? Что сложнее? Почему? Попросите учащихся обсудить их опыт езды на велосипеде и объясните, что шестерни в велосипеде преобразуют энергию, которую они прилагают, в энергию, которая заставляет велосипед двигаться.
2. Примите участие в групповой демонстрации механизмов с использованием предметов повседневного обихода.
Спросите : Почему шестерни имеют зубья? ( Шестерни имеют зубья для предотвращения скольжения.) Спросите : Если бы шестерня не имела зубьев, что бы это было? (В большинстве случаев шестерня без зубьев будет колесом. Существуют относительно редкие версии шестерен без зубьев, но почти все шестерни имеют зубцы.) Скажите студентам, что это означает, что мы можем экспериментировать с поведением шестерни, используя другие круглые или круглые объекты. Положите два теннисных мяча рядом на стол в передней части класса. Вызовите добровольца и попросите ученика положить руку на мяч справа, а кончик пальца — на мяч слева.Попросите ученика повернуть мяч справа по часовой стрелке, осторожно удерживая другой мяч на месте кончиком пальца. Это должно заставить мяч слева вращаться против часовой стрелки. Попросите учащегося описать, в каком направлении вращается каждый шар.
Вызовите еще двух добровольцев. Поместите третий теннисный мяч на прямую линию рядом с первыми двумя теннисными мячами. Попросите одного добровольца положить кончик пальца на средний шарик, чтобы удерживать его на месте, в то время как два других добровольца повернут внешние шарики по часовой стрелке.Предложите студентам описать, в каком направлении поворачивается каждый мяч. Объясните ученикам, что две взаимосвязанные шестерни будут вращаться в противоположных направлениях. Это меняет направление силы в системе. При добавлении третьей шестерни направление силы последней шестерни в цепи такое же, как и у первой шестерни в цепи.
Попросите нового волонтера. Дайте ему или ей баскетбольный и теннисный мяч. Попросите добровольца поместить баскетбольный мяч справа от себя, а теннисный мяч — слева и соединить мячи так, чтобы они соприкасались.Теперь попросите ученика положить руку на каждый мяч и повернуть баскетбольный мяч по часовой стрелке на четыре полных оборота, осторожно удерживая кончик пальца поверх теннисного мяча. Помогите посчитать повороты баскетбольного мяча, пока доброволец наблюдает за движением теннисного мяча. Попросите учащегося описать то, что он наблюдал. Попросите ученика повторить демонстрацию, на этот раз повернув теннисный мяч на четыре полных оборота и описывая движение баскетбольного мяча.
Попросите учащегося описать то, что он наблюдал. Попросите ученика повторить демонстрацию, на этот раз повернув теннисный мяч на четыре полных оборота и описывая движение баскетбольного мяча.
Объясните ученикам, что, используя шестерни разного размера, они могут изменять скорость (скорость) системы; это называется передаточным числом.Например, если у вас есть две шестерни (A и B) и A в два раза больше B, то за один оборот A, B будет вращаться дважды, тем самым увеличивая скорость (скорость). Если вы переключите передачи, скорость (скорость) будет уменьшена. Итак, теннисный мяч вращается с другой скоростью, чем баскетбольный.
3. Поэкспериментируйте с зубчатыми колесами и ремнями, используя катушки и перфорированную доску.
Разделите класс на рабочие группы по 2-4 человека в зависимости от количества имеющихся материалов.Раздайте каждой группе перфорированную доску, десять колышков, восемь катушек (четыре маленьких и четыре больших), четыре резинки и раздаточный материал «Подготовка роботов». Дайте им следующие инструкции или попросите учащихся следовать за вами, пока вы демонстрируете. Задавайте вопросы, чтобы проверить понимание и успеваемость учащихся. Поощряйте студентов, которые более наглядны, читать шаги, приведенные в раздаточном материале «Подготовка к работе с роботами», во время работы. Если учащимся нужна помощь, отображайте фотогалерею Gearing Up with Robots во время работы.
Дайте им следующие инструкции или попросите учащихся следовать за вами, пока вы демонстрируете. Задавайте вопросы, чтобы проверить понимание и успеваемость учащихся. Поощряйте студентов, которые более наглядны, читать шаги, приведенные в раздаточном материале «Подготовка к работе с роботами», во время работы. Если учащимся нужна помощь, отображайте фотогалерею Gearing Up with Robots во время работы.
4. Учащиеся используют колышки и катушки для решения задач, связанных с шестернями.
Скажите студентам, что теперь они будут работать в команде над решением ряда задач, решения которых связаны с шестеренками. Скажите им, что они должны работать в команде для решения каждой из этих задач, используя свои перфорированные доски, катушки и резинки. Выполняйте столько задач, сколько позволяет время, или дайте каждой группе поработать над разными задачами. После каждого испытания выполняйте задание Шаг 5.
- Задача 1: Роботу требуется энергия, передаваемая на его колеса от источника энергии, расположенного на расстоянии; Кроме того, необходимо изменить направление движения, чтобы робот двигался вперед, а не назад. Есть шестерни и ремень, с которым можно работать. Какая конфигурация подойдет для решения этой проблемы?
- Задача 2: Роботу требуется энергия, передаваемая на его колеса от источника энергии, расположенного на расстоянии, но направление движения не нужно менять.Есть шестерни и ремень, с которым можно работать. Какая конфигурация подойдет для решения этой проблемы?
- Задача 3: Роботу необходимо двигаться быстрее, чем позволяет его источник энергии, и инженер готов пожертвовать мощностью ради скорости. Есть большая шестерня, маленькая шестерня и ремень, с которым можно работать. Какая передача ставится рядом с источником питания, чтобы набрать скорость?
- Задача 4: Роботу требуется больше мощности для преодоления крутых склонов, а инженер готов пожертвовать скоростью.Есть большая шестерня, маленькая шестерня и ремень, с которым можно работать. Какую передачу ставить рядом с источником питания, чтобы получить мощность?
5. Предложите студенческим группам поделиться своими решениями задач.
Предложите студенческим группам поделиться своими решениями задач.
Попросите группы показать свои доски и объяснить свои решения. Обязательно побудите студентов объяснить, почему они сделали то, что они сделали. Примеры решений этих проблем представлены в фотогалерее Gear Challenge Solutions.
Разрешите бесплатные эксперименты, если позволяет время.
Введение в роботизированные шестерни, передаточные числа и число оборотов
Шестерни похожи на колеса с зубьями, сцепляющимися вместе и заставляющими вещи вращаться. Шестерни используются для передачи движения или мощности от одной движущейся части к другой. Зубчатая передача вращается, часть машины имеет нарезанные зубья или зубья, а также другой зубчатый венец для передачи крутящего момента,
Набор шестерен, обычно используемых для изменения направления вращения, увеличения или уменьшения скорости вращательного движения, для перемещения вращательного движения на другую ось, чтобы синхронизировать вращение двух осей.
Цилиндрические зубчатые колеса — это одинаковые зубчатые колеса, которые перемещаются друг напротив друга, потому что они зацеплены друг с другом. Шестерня (A) — это привод, вращаемый двигателем, зацепленный с шестерней (B), называемой ведомой шестерней.
Цилиндрическая шестерняДелительная окружность шестерни очень важна, она используется инженерами для определения формы зубьев и соотношения между шестернями. Шаг шестерни — это расстояние между любой точкой на одном зубе и такой же точкой следующего зуба, а корень — это нижняя часть шестерни.
Червячная зубчатая передача Ниже приведен пример зубчатых колес, называемых червячной и червячной шестернями, эта шестерня, которая в приведенном ниже примере имеет один зуб, но похожа на резьбу винта, как обычная шестерня или прямозубая шестерня, эта червячная передача всегда приводит в движение червячное колесо круглый, это не наоборот.
используется для изменения направления ведущей шестерни на 90 градусов, конические шестерни изменяют вращение патрона на горизонтальное.
Система реечной передачиСистема реечной передачи состоит из двух шестерен. Шестерня представляет собой обычную прямозубую шестерню, а рейка — прямая или плоская шестерня, и они входят в зацепление с зубьями ведущей шестерни, а шестерня вращается и перемещает рейку по прямой линии.
Составная зубчатая передачаСоставные шестерни используются в основном в автомобильных двигателях, станках для мастерских, робототехнике и других механических устройствах.Иногда составные шестерни используются в основном для того, чтобы последняя шестерня зубчатой передачи вращалась с точной скоростью.
Передаточное число / Передаточное число Передачи переключаются из-за того, что называется передаточным числом / передаточным числом. Передаточное число может работать в виде чисел, в основном передаточное число определяется количеством зубьев на каждой шестерне. ( Каждые 3 оборота ведущей шестерни ведомая шестерня будет вращаться на 1. )
Передаточное число может работать в виде чисел, в основном передаточное число определяется количеством зубьев на каждой шестерне. ( Каждые 3 оборота ведущей шестерни ведомая шестерня будет вращаться на 1. )
Ведущая шестерня больше ведущей шестерни, правило большое для малой шестерни означает (x) умножение передаточного отношения, число оборотов в минуту первой шестерни (/), деленное на 60 зубьев на 30 зубцов, до отношения скоростей 1 2, затем умножьте это число 2 на 120 об / мин, и вы получите ответ 240 об / мин.
Двигатели
Вернуться на СТРАНИЦУ МОДУЛЯ
Двигатели
Джереми Готлиб: автор
Дэвид Лич Андерсон: автор
Двигатели — один из основных механизмов, с помощью которых движутся роботы. Некоторые моторы могут быть прикреплены к колесам, которые вращают робота. Другие двигатели могут вызывать движение суставов в конечностях робота. Третьи могут перемещать управляющие поверхности самолета-робота или подводной лодки. У робота может быть много разных видов эффекторов для выполнения определенных задач, но многие из этих эффекторов перемещаются с помощью двигателей.
Другие двигатели могут вызывать движение суставов в конечностях робота. Третьи могут перемещать управляющие поверхности самолета-робота или подводной лодки. У робота может быть много разных видов эффекторов для выполнения определенных задач, но многие из этих эффекторов перемещаются с помощью двигателей.
Двигатели преобразуют электрическую энергию робота в механическую энергию, которая позволяет роботу выполнять работу. Есть два измерения двигателя, которые важны для понимания того, сколько работы он может выполнять.
Скорость — это максимальная скорость двигателя. Обычно это оборотов в минуту, или об / мин. 1 об / мин означает, что ось двигателя будет полностью вращаться по кругу раз в минуту, что очень медленно.Даже очень дешевый двигатель постоянного тока будет иметь номинальную скорость не менее 1000 об / мин.
Крутящий момент — это мера выходной мощности двигателя. Проще всего подумать об этом: если вы прикрепите руку с грузом к оси двигателя, какой максимальный вес может поднять двигатель.
Обычно (хотя и не всегда), чем выше скорость двигателя, тем ниже его крутящий момент и наоборот. Часть хитрости при проектировании и создании робота состоит в том, чтобы найти двигатели с правильным балансом крутящего момента и скорости. Gears можно использовать для преобразования скорости в крутящий момент или из крутящего момента в скорость, как в автомобиле. В автомобиле первая передача — это передача с высоким крутящим моментом, потому что двигателю требуется большая сила, чтобы начать движение вперед. Однако, когда вы путешествуете по шоссе, инерция автомобиля будет делать большую часть этой работы, поэтому вам нужно переключиться на высокую скорость, чтобы машина продолжала двигаться на высокой скорости. Это то, что делает высшая передача автомобиля. Промежуточные шестерни уменьшают крутящий момент и увеличивают скорость по мере увеличения.
По большому счету, двигатели бывают двух основных типов:
I. Двигатели постоянного тока (DC)
Двигатели постоянного тока называются так потому, что они питаются от тока, протекающего через электроды двигателя. Номинальная скорость двигателя постоянного тока — это максимальная скорость, на которой он может работать. Фактическая скорость двигателя зависит от силы тока, приложенного к двигателю. Двигатели постоянного тока могут вращаться как вперед, так и назад в зависимости от направления приложенного тока.Специальные схемы, называемые «H-мостами», позволяют использовать переключатели и транзисторы для изменения направления движения двигателя без необходимости менять какие-либо провода. По большей части двигатели постоянного тока имеют очень высокую скорость и, следовательно, очень низкий крутящий момент. Шестерни и трансмиссии позволяют нам преобразовывать скорость двигателя постоянного тока в крутящий момент, который можно использовать для других задач, таких как перемещение тяжелых роботов или подъем предметов.
Номинальная скорость двигателя постоянного тока — это максимальная скорость, на которой он может работать. Фактическая скорость двигателя зависит от силы тока, приложенного к двигателю. Двигатели постоянного тока могут вращаться как вперед, так и назад в зависимости от направления приложенного тока.Специальные схемы, называемые «H-мостами», позволяют использовать переключатели и транзисторы для изменения направления движения двигателя без необходимости менять какие-либо провода. По большей части двигатели постоянного тока имеют очень высокую скорость и, следовательно, очень низкий крутящий момент. Шестерни и трансмиссии позволяют нам преобразовывать скорость двигателя постоянного тока в крутящий момент, который можно использовать для других задач, таких как перемещение тяжелых роботов или подъем предметов.
II. Серводвигатели
Серводвигатели — это специальные двигатели, которые работают в ответ на специальные сервосигналы, а не на изменения тока.Сервопривод всегда имеет одинаковый ток в одном и том же направлении. Он также имеет отдельный вход для сигнальных импульсов. Каждый импульс заставляет двигатель двигаться на определенное заранее заданное расстояние. Размер импульса определяет, в каком направлении вращается двигатель (обычно большие импульсы означают движение вперед, а маленькие импульсы — назад). Количество импульсов будет определять, как далеко двигатель переместится в целом. Очень хорошие сервоприводы будут совершать движения с малыми долями градуса. Даже дешевые сервоприводы обычно перемещаются всего на один или два градуса за импульс.
Он также имеет отдельный вход для сигнальных импульсов. Каждый импульс заставляет двигатель двигаться на определенное заранее заданное расстояние. Размер импульса определяет, в каком направлении вращается двигатель (обычно большие импульсы означают движение вперед, а маленькие импульсы — назад). Количество импульсов будет определять, как далеко двигатель переместится в целом. Очень хорошие сервоприводы будут совершать движения с малыми долями градуса. Даже дешевые сервоприводы обычно перемещаются всего на один или два градуса за импульс.
Коробка передач | Урок | Академия роботов
Практически все электродвигатели используются вместе с редукторами. Причина этого в том, что электродвигатели развивают относительно низкий крутящий момент. Они не особо сильные. Однако они способны очень быстро вращаться. Таким образом, мы можем использовать коробку передач, чтобы найти компромисс между скоростью и крутящим моментом. Конечно, бесплатного обеда не бывает, а коробка передач вносит некоторую неэффективность, есть некоторую потерю мощности. Эта потеря мощности связана с тепловым и акустическим шумом.
Эта потеря мощности связана с тепловым и акустическим шумом.
Если вы используете велосипед, вы, вероятно, хорошо знакомы с концепцией передачи. Электродвигатели могут вращаться очень-очень быстро, но они не развивают большой крутящий момент, они слабые.
Теперь это немного похоже на езда на велосипеде в гору. Вы хотите изменить большое количество оборотов педалей, чтобы уменьшить нагрузку, которую вы должны оказывать на эти педали. Вы жертвуете большой скоростью ради большого крутящего момента.
Для электродвигателя это то же самое, что и для велосипеда, у вас есть маленькая звездочка спереди на педалях, а у вас есть звездочка большего размера на заднем колесе.Таким образом, на каждый оборот электродвигателя приходится только половина оборота выходного вала редуктора двигателя. Таким образом, двигатель вращается довольно быстро, выходной вал вращается довольно медленно, но крутящий момент двигателя увеличивается за счет передаточного числа.
Вот двигатель с одноступенчатым редуктором. Мы называем это редуктором, потому что за каждый оборот двигателя выходной вал поворачивается меньше одного раза. Когда мы говорим о двух сторонах коробки передач, мы называем сторону двигателя, которая обозначена индексом M, а сторона нагрузки — индексом L.Передаточное число коробки передач — это заглавная буква G, и это отношение количества зубьев большого колеса к количеству зубьев маленького колеса. А для понижающей коробки G больше единицы.
Мы называем это редуктором, потому что за каждый оборот двигателя выходной вал поворачивается меньше одного раза. Когда мы говорим о двух сторонах коробки передач, мы называем сторону двигателя, которая обозначена индексом M, а сторона нагрузки — индексом L.Передаточное число коробки передач — это заглавная буква G, и это отношение количества зубьев большого колеса к количеству зубьев маленького колеса. А для понижающей коробки G больше единицы.
Выходная скорость омега L равна 1 на G, умноженном на омега N. Таким образом, скорость выходного вала ниже скорости двигателя. Выходной крутящий момент tau L равен G, умноженному на крутящий момент двигателя tau M, поэтому выходной крутящий момент больше крутящего момента двигателя. Это фундаментальные уравнения, описывающие характеристики коробки передач.Он снижает скорость и увеличивает крутящий момент.
передач — VEX Robotics
Комплект шестерен (276-2169)
(4) Шестерни 12 зуб.
(4) Шестерни 36 зуб.
(4) Шестерни 60 зуб.
(2) Передачи 84 зуб.
Metal Gear 12T (276-7368)
(12) Metal Gears 12T
Высокопрочная металлическая шестерня 12T (комплект из 12) (276-2251)
(12) Металлическая шестерня 12T (диаметр 0,58 дюйма)
(12) Вкладыши шестерни 12 зуб.
Высокопрочный комплект шестерни 36 зуб. (276-5034)
(8) Высокопрочная шестерня 36 зуб.
(16) Вставка квадратной шестерни
(16) Вставка свободного вращения
Высокопрочная шестерня 60T (276-5035)
(8) Высокопрочная шестерня 60T
(16) Вставка квадратной шестерни
(16) Вставка свободного вращения
Высокопрочная зубчатая передача 84 зуб. (276-3438)
(4) Высокопрочная зубчатая передача 84 зуб.
(8) Вставка квадратной шестерни
(8) Вставка свободного вращения
Комплект высокопрочной шестерни (276-2250)
(4) Высокопрочная шестерня 12 зуб. (0.Диаметр 58 дюймов)
(0.Диаметр 58 дюймов)
(4) Высокопрочная шестерня 36T (диаметр 1,58 дюйма)
(4) Высокопрочная шестерня 60T (диаметр 2,58 дюйма)
(16) Высокопрочная вставка квадратной шестерни
(16) Вставка свободного вращения
Зубчатая рейка (276-1957)
(16) Зубчатая рейка 19 зуб.
Rack Gear v2 (276-4872)
(16) 19T Rack Gear v2
Расширенный комплект зубчатых колес (276-2184)
(8) Реечная шестерня 19 зуб.
(2) Металлическая шестерня 12 зуб. Шестерня
(16) # 6-32 x 1/4 дюйма Винты с полукруглой головкой
Комплект высокопрочных вставок вала (276-3881)
(8) Пластиковые вставки вала
(8) Металлические вставки вала
Комплект шестерен (276-2169): Ацеталь
Высокопрочная металлическая шестерня 12 зуб. (Упаковка по 12 шт.) (276-2251): Сталь
12 зубьев Metal Gear (276-7368): Сталь
Высокопрочная шестерня 36 зуб. (276-5034): Ацеталь
(276-5034): Ацеталь
Высокопрочная шестерня 60 зуб. (276-5035): Ацеталь
Высокопрочная шестерня 84 зуб. (276-3438): Ацеталь
Зубчатая рейка (276-1957): Ацеталь
Rack Gear v2 (276-4782): Acetal
Advanced Gear Kit (276-2184): Ацеталь
Комплект высокопрочных вставок вала (276-3881)
Вставка для свободного вращения — АБС-пластик
Вставка HS — металлический порошок
Высокопрочная металлическая шестерня 12 зуб. (Упаковка из 12 шт.) (276-2251): 0.002 фунта (0,907 грамма)
Высокопрочная шестерня 36 зуб. (276-5034): 0,012 фунта (5,44 г)
Высокопрочная шестерня 60 зуб. (276-5035): 0,03 фунта (15 г)
Высокопрочная шестерня 84 зуб. (276-3438): 0,08 фунта (35 г)
Rack Gear (276-1957): 0,020 фунта (9,07 г)
Все указанные веса являются фактическими весами одного предмета (без упаковки)
Комплект шестерен (276-2169)
Тип шестерни — прямозубый
Диаметр диаметра — 24
Угол давления — 20 градусов
Ширина торца — 0. 250 дюймов (6,35 мм)
250 дюймов (6,35 мм)
Высокопрочная металлическая шестерня 12 зуб. (Комплект из 12) (276-2251)
Тип шестерни — прямозубое колесо
Диаметр шага — 24
Угол давления — 20 градусов
Ширина торца — 0,500 дюйма (12,7 мм)
Диаметр шага — 0,5 «(12,7 мм)
Высокопрочная шестерня 36 зуб. (276-5034)
Диаметр шага — 1,5 дюйма (38,1 мм)
Высокопрочная шестерня 60 зуб. (276-5035)
Диаметр шага — 2,5 дюйма (63,5 мм)
Высокопрочная шестерня 84 зуб. (276-3438)
Диаметр шага — 3.5 дюймов (88,9 мм)
Комплект высокопрочной шестерни (276-2250)
Тип шестерни — прямозубое колесо
Диаметр диаметра — 24
Угол давления — 20 градусов
Ширина торца — 0,500 дюйма (12,7 мм)
Зубчатая рейка (276-1957)
Длина — 2,50 дюйма (63,5 мм)
Расширенный комплект зубчатых колес (276-2184)
Рама дифференциала Требуется (3) коническая шестерня с 24 зубьями для создания функционального дифференциала
Зубчатые рейки можно непрерывно комбинировать для создания более длинных ползунов
Длина червячной передачи — 075 дюймов (19,1 мм)
Длина зубчатой рейки — 2,50 дюйма (63,5 мм)
Понимание конструкции двигателя и коробки передач: 10 шагов (с изображениями)
Теперь мы должны выбрать двигатель и передаточное число. Мы начнем с рассмотрения технических характеристик доступных двигателей и сделаем предположение о том, какой из двигателей может хорошо подойти для этой работы. Мы попробуем использовать один BaneBots RS-550 в качестве отправной точки из-за его высокой мощности, а это значит, что он сможет выполнять работу быстрее. Кроме того, он обычно используется в подобных приложениях, а это означает, что он, вероятно, хорошо подходит для работы в целом.Чтобы упростить оценку, я сделал график кривой двигателя для RS-550.
Во-первых, мы хотим убедиться, что двигатель не потребляет больше 40 А и не срабатывает автоматический выключатель. Глядя на график, мы можем визуально увидеть, что RS-550 требуется нагрузка 0,23 Нм, чтобы тянуть 40 А. Чтобы двигатель не достиг этого уровня даже при большой нагрузке, мы попробуем спроектировать для потребляемый ток 20 А. Посмотрев снова на график, мы видим, что это соответствует крутящему моменту 0,115 Нм. Теперь мы можем рассчитать уменьшение, которое нам потребуется для достижения необходимого крутящего момента, равного 3. 05 Нм.
05 Нм.
Редуктор:
Теперь мы выбрали редуктор 26: 1, что означает, что мы можем рассчитать точную нагрузку, с которой должен столкнуться наш двигатель лифта.
Нагрузка на двигателе:
Теперь мы можем использовать уравнение (1) из «Характеристики двигателя», чтобы вычислить ток, который мы ожидаем от RS-550 при этой нагрузке:
Потребляемый ток:
Наш расчетный ток потребления, 21,0 А находится в пределах допустимого диапазона 40 А. Затем мы определим скорость вращения выходного вала коробки передач с помощью уравнения (2).На этом этапе расчетов мы учтем КПД коробки передач 75%.
Скорость двигателя:
Теперь мы можем проверить, позволит ли выбранное передаточное число достичь желаемой выходной скорости 357 об / мин.
Скорость коробки передач:
Наконец, теперь, когда мы убедились, что передаточное число удовлетворяет нашим требованиям, мы можем рассчитать, сколько времени потребуется двигателю, чтобы поднять лифт.
Время подъема:
Теперь мы полностью проверили, что наш двигатель RS-550 и коробка передач 26: 1 достигают или превосходят наши первоначальные цели.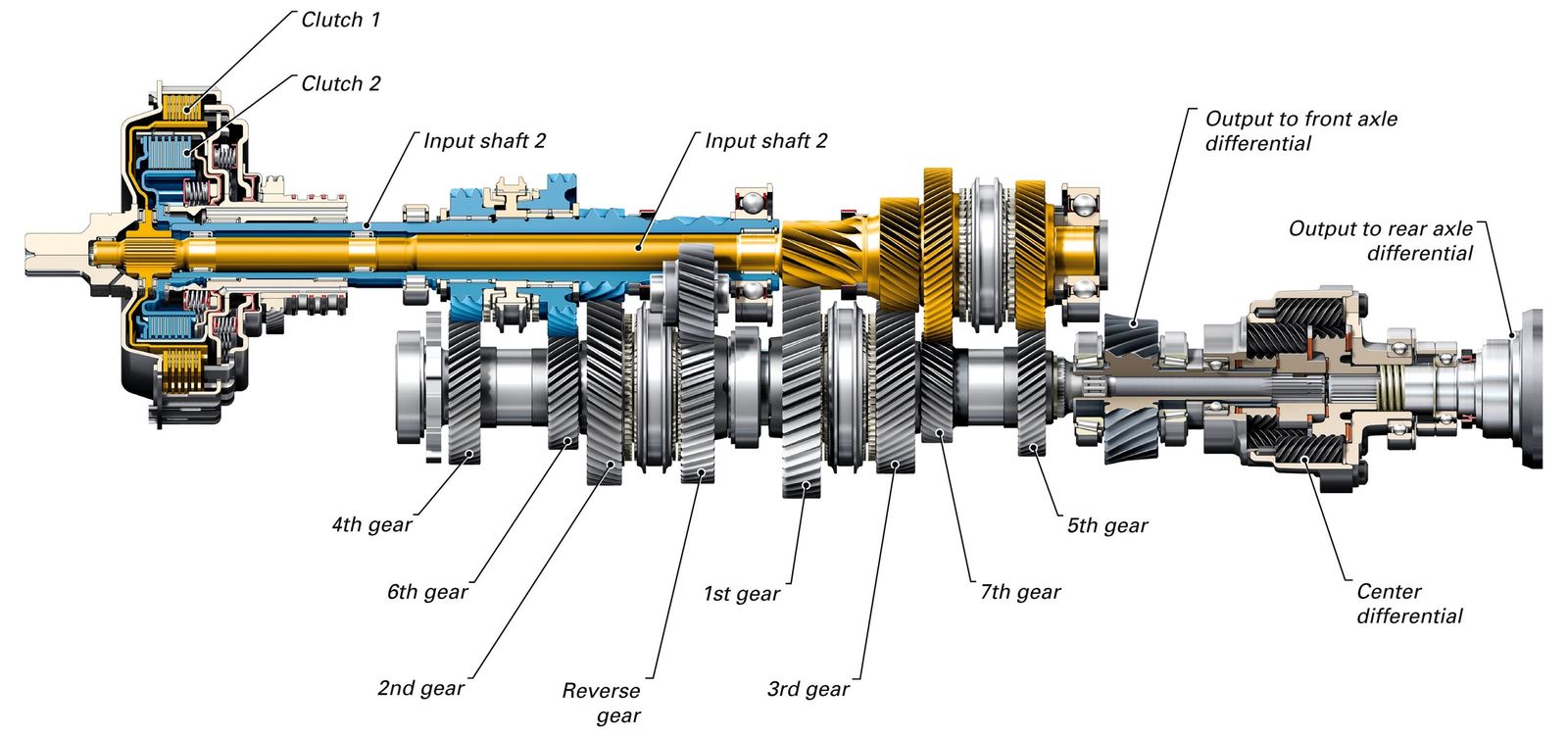 Поскольку реальная производительность часто бывает хуже, чем теоретическая, разумно «перепроектировать» эти системы. Это также гарантирует, что наши упрощения не приведут к тому, что наша система будет работать намного хуже, чем ожидалось.
Поскольку реальная производительность часто бывает хуже, чем теоретическая, разумно «перепроектировать» эти системы. Это также гарантирует, что наши упрощения не приведут к тому, что наша система будет работать намного хуже, чем ожидалось.
Когда вы впервые выполняете этот процесс, вам, возможно, придется выполнять вычисления несколько раз, пробуя разные двигатели и передаточные числа. По мере накопления опыта вы научитесь интуитивно понимать, какие двигатели и передаточные числа лучше всего подходят для вашей работы.
Последний шаг в этом процессе — выбор коробки передач.В этом примере имеет смысл выбрать версию RS-550 коробки передач P60 Banebot с редуктором 26: 1. Он не только совместим с нашим двигателем, но также имеет правильный редуктор и общий выходной вал с клиновой шпонкой 0,5 дюйма.
Надеюсь, этот пример задачи помог вам понять процесс выбора двигателя и коробки передач. Кроме того, я надеюсь, что он показал вам, как правильно применять теорию, которую вы изучили ранее в этом уроке.
Рука робота с пятью шестью степенями свободы
Я начал проект манипулятора-робота, и мои первые шаги, потому что я очень хочу начать, — спроектировать совместные приводы.Мой план — рука 5R, что означает, что он будет состоять из 5 поворотных шарниров, каждый из которых добавит руке одну степень свободы.
Я должен начать с теории | либо параметров DH, либо экспоненциальных произведений для решения прямой кинематики проблема, но я хочу начать с дизайна, поэтому естественное место для начала — это исполнительный механизм. Я хотел создать единый стык.
Приводы манипулятора робота медленнее и требуют большего крутящего момента по сравнению с размером машины, чем другие приложения,
такие как двигатели электромобилей.Я смотрел много видео на Youtube и проводил исследования по различным конструкциям коробок передач. Есть
несколько различных подходов к понижению передачи двигателя, но поскольку я хочу использовать шаговые двигатели, мне нужно более высокое передаточное число, чтобы
увеличить эффективный удерживающий момент и разрешение. Типичное передаточное число с прямой передачей не дает мне необходимого уменьшения. Я изначально думал
про дифференциальный привод, очень хотелось Skyentific , который представляет собой два шарнирных соединения, расположенных друг над другом: шарнирное соединение.Преимущества этого в том, что я могу
переместите двигатели ближе к основанию, уменьшив крутящий момент, необходимый для перемещения рычага, но сложность, связанная с созданием дифференциала
привод, особенно с 3D-печатной передачей, по-видимому, не нужен. Я обратился к другим методам.
Типичное передаточное число с прямой передачей не дает мне необходимого уменьшения. Я изначально думал
про дифференциальный привод, очень хотелось Skyentific , который представляет собой два шарнирных соединения, расположенных друг над другом: шарнирное соединение.Преимущества этого в том, что я могу
переместите двигатели ближе к основанию, уменьшив крутящий момент, необходимый для перемещения рычага, но сложность, связанная с созданием дифференциала
привод, особенно с 3D-печатной передачей, по-видимому, не нужен. Я обратился к другим методам.
Следующим очевидным выбором будет планетарный редуктор. Обычно они предлагают множество вариаций и позволяют использовать несколько различных входных и выходных данных.
баллы для высоких передач.Некоторое время я серьезно обдумывал это, но попытался распечатать коробку передач из thingiverse , но величина трения шестерен, обеспечивающая жесткие допуски и низкий люфт, к сожалению, неприемлема, поэтому я оставил
поиск.
В большинстве современных роботов используется тип редуктора, известный как редуктор деформационной волны, который основан на гибком шлице. внутри кругового шлица для создания высокого передаточного отношения. Они тихие, компактные и предлагают невероятно большие редукции с очень небольшим люфтом, но они трудно изготовить на 3D-принтере, а именно гибкую шлицевую шпонку.Есть реализует напечатанные на 3D-принтере приводы волн деформации , но существуют и другие аналогичные методы, основанные на аналогичном принципе, которые предлагают меньшую сложность.
Эпициклоидные или циклоидные приводы — это еще одна форма коробки передач, в которой используется различие зубьев между внутренней и внешней секциями. Внутренняя шестерня — эпиоциклоида,
это форма, которую вы получите, когда начнете рисовать точку на круге, которая катится по внешней стороне другого круга. Это действительно сбивающее с толку описание, но хорошее
анимацию этого можно найти в Вольфраме. com .
com .
На фото моя первая попытка создать циклоидальную коробку передач. Обычно циклоидальная шестерня (желтая) — это вращающаяся часть коробки передач, но в этом случае проницательный может заметить винты, которые проходят сквозь
отверстия в шестерне. Они должны удерживать его на месте. Зачем мне это делать? Хороший вопрос! Меня вдохновил Пол Гулд на Hackaday. Основной принцип следующий (простите, если что-то не так, я всего лишь инженер-электрик :)).Кликлоидальная передача приводится в движение эксцентриковой осью, приводимой в движение двигателем. Это толкает циклоидальную шестерню на один шаг на внешних штифтах за каждый оборот внутренней оси, что
Вот как циклоидальная коробка передач достигает такого высокого передаточного числа в таком небольшом форм-факторе. Теперь представьте, что вы ограничиваете это движение ровно настолько, чтобы он мог завершить свой полный ход, но вместо вращения
шестерня вместо этого отводится назад, что, в свою очередь, натягивает штифты. Это движение оказывает давление на внешнюю оболочку коробки передач.Что это обозначает? Дело в том, что вокруг центра вращается внешняя оболочка, а не циклоидальная шестерня.
Это движение оказывает давление на внешнюю оболочку коробки передач.Что это обозначает? Дело в том, что вокруг центра вращается внешняя оболочка, а не циклоидальная шестерня.
Почему это важно? Это означает, что я могу установить что-то на внешнюю часть коробки передач, а не на ее конец, что важно для сохранения ширины привода. до минимума. Минимизация размера привода важна, потому что он находится на плече, который, по сути, представляет собой гигантский рычаг момента на нижних суставах. Итак, имея это в виду, что я узнал в этой первой реализации?
90 мм — действительно большой диаметр для настольного манипулятора робота.Я искал размеры примерно
размер моего кулака чуть меньше, чем обычная кофейная кружка. Эта штука размером с идеальную кружку для любителей кофеина рано утром.
Вы знаете, кто вы (я полностью уверен).
Отверстия для шурупов не должны быть точно такого же размера, как шурупы, для которых они предназначены. Я потратил около пяти минут, пытаясь создать нить
винт M3 x 50 мм через пластиковое отверстие, достаточное для этого.