Общие сведения об устройстве тяговых двигателей постоянного и пульсирующего тока
§ 29. Общие сведения об устройстве тяговых двигателей постоянного и пульсирующего тока
| Принцип работы тягового двигателя постоянного тока основан на использовании явления электромагнитной индукции. Его конструкция в отличие от большинства промышленных машин постоянного тока обусловлена тяжелыми и своеобразными условиями работы и типом тяговой передачи. Однако все тяговые двигатели постоянного и пульсирующего тока имеют много общего в части возбуждения и конструктивного исполнения. Большинство тяговых двигателей выполнено с последовательным возбуждением, которое, как известно, позволяет получать мягкие характеристики. У двигателей с последовательным возбуждением при возрастании нагрузки, например вдвое, частота вращения их якорей уменьшается до 70% первоначальной, а потребляемая ими мощность возрастает лишь на 0,25%. Скоростные характеристики таких двигателей называют мягкими. В двигателях с параллельным возбуждением с увеличением нагрузки на их валах вдвое ток и мощность также возрастают вдвое Поэтому их скоростные характеристики называют жесткими.
В двигателях с параллельным возбуждением с увеличением нагрузки на их валах вдвое ток и мощность также возрастают вдвое Поэтому их скоростные характеристики называют жесткими.
У двигателей последовательного возбуждения вследствие квадратичной (до насыщения) зависимости вращающего момента от нагрузки довольно просто регулировать режимы работы и мощность При увеличении нагрузки значительно увеличивается вращающий момент и уменьшается частота вращения, а при снижении ее уменьшается вращающий момент, но увеличивается частота, т е. автоматически регулируется мощность двигателя, в то время как у двигателя с параллельным возбуждением требуется регулировать ток возбуждения для изменения частоты вращения На же-
лезных дорогах Советского Союза и зарубежных имеются опытные электровозы с независимым и смешанным возбуждением тяговых двигателей.
Колебания напряжения в контактной сети, неизбежные в условиях эксплуатации, значительно меньше отражаются на работе двигателей с последовательным возбуждением, чем с параллельным.
Магнитный поток двигателя с параллельным возбуждением возрастает медленно; при включении двигатель хуже переносит различные переходные процессы. При одном и том же токе в зоне больших нагрузок (что соответствует режиму пуска) двигатель с последовательным возбуждением имеет больший вращающий момент, чем двигатель с параллельным возбуждением при той же мощности. Габаритные размеры двигателя с параллельным возбуждением будут больше, так как при максимальной силе тяги он потребляет значительно больший ток, чем двигатель с последовательным возбуждением, и, следовательно, значительно больше нагреваются его узлы.
Однако тяговые двигатели с последовательным возбуждением склонны к бок-сованию, а при использовании их на э.п.с. с рекуперативным и рекуперативно-реос-
татным торможением необходим специальный возбудитель для независимого питания обмоток при рекуперации. Все это приводит к увеличению как эксплуатационных расходов, так и капитальных вложений на изготовление электровозов с тяговыми двигателями последовательного возбуждения.
На современных локомотивах мощность тяговых двигателей и электровоза регулируют не ступенчато, а плавно, используя тиристоры В этом случае, применяя независимое или смешанное возбуждение тяговых двигателей, можно значительно расширить пределы регулирования мощности электровоза по сравнению с имеющимися при тяговых двигателях последовательного возбуждения. Принципиально независимое и смешанное возбуждение тяговых двигателей возможно осуществить на электровозах как постоянного, так и переменного тока (подробно см. § 83).
Принципиально независимое и смешанное возбуждение тяговых двигателей возможно осуществить на электровозах как постоянного, так и переменного тока (подробно см. § 83).
Все тяговые двигатели выполняют закрытого типа с независимой вентиляцией (на электровозах) либо самовентилирующимися (на моторных вагонах) Основными узлами каждого тягового двигателя постоянного и пульсирующего тока являются: остов, главные и добавочные (дополнительные) полюса, якорь, щеткодержатели с кронштейнами, подшипниковые щиты. Двигатели с опорно-осевым подвешиванием имеют еще шапки моторно-осевых подшипников, а самовентилирующиеся — вентиляторы.
Размеры каждого тягового двигателя, его масса, эксплуатационные и экономические показатели при заданных мощности двигателя в часовом режиме, напряжении на зажимах, напряжении на изоляцию и др. зависят в основном от диаметра якоря й я и длины его сердечника / я. Эти размеры определяются механическими, магнитными и токовыми нагрузками, которые обусловлены соответственно частотой вращения якоря, индукцией в воздушном зазоре В а и линейной нагрузкой якоря А, связанными уравнением
Ръ = £/„ • 10_3 = ЛВ6авкяя. ном — номинальная расчетная сила тяги колесной пары, кН; V ном — номинальная расчетная скорость, км/ч; т| „ — к.п.д. тяговой передачи (для одноступенчатой зубчатой передачи т) „ = 0,975).
ном — номинальная расчетная сила тяги колесной пары, кН; V ном — номинальная расчетная скорость, км/ч; т| „ — к.п.д. тяговой передачи (для одноступенчатой зубчатой передачи т) „ = 0,975).
Сила тяги /•’ном = фР 0 зависит от заданной нагрузки движущей колесной пары на рельсы Р 0 и коэффициента сцепления ф, номинальная скорость — от назначения локомотива. К выбору расчетных значений силы тяги и скорости подходят очень тщательно. Если сила тяги несколько занижена, двигатели будут часто работать с перегрузкой. При завышении расчетной скорости увеличивается необходимая мощность двигателя и коммутационной аппаратуры, что повышает их массу и размеры.
⇐Предыдущая Оглавление Следующая⇒
Оценочные исследования тягового асинхронного электродвигателя с пониженным напряжением питания для рудничного электровоза
Please use this identifier to cite or link to this item: http://earchive. tpu.ru/handle/11683/44740
tpu.ru/handle/11683/44740
| Title: | Оценочные исследования тягового асинхронного электродвигателя с пониженным напряжением питания для рудничного электровоза |
| Other Titles: | Evaluative research of induction traction electric motor with low-level power supply for mine locomotive |
| Authors: | Арсентьев, Олег Васильевич Баранов, Павел Рудольфович Вильнин, Александр Даниилович Кладиев, Сергей Николаевич Arsentiev, Oleg Vasilievich Baranov, Pavel Rudolfovich Vilnin, Alexaner Daniilovich Kladiev, Sergey Nikolaevich |
| Keywords: | тяговые асинхронные двигатели; рудничные электровозы; параметры; схемы замещения; механические характеристики; пониженное напряжение; питание; induction traction motor; mine locomotive; equivalent circuit parameters; mechanical characteristics; lower supply voltage |
| Issue Date: | 2017 |
| Publisher: | Томский политехнический университет |
| Citation: | Оценочные исследования тягового асинхронного электродвигателя с пониженным напряжением питания для рудничного электровоза / О. В. Арсентьев [и др.] // Известия Томского политехнического университета [Известия ТПУ]. Инжиниринг георесурсов. — 2017. — Т. 328, № 11. — [С. 126-138]. В. Арсентьев [и др.] // Известия Томского политехнического университета [Известия ТПУ]. Инжиниринг георесурсов. — 2017. — Т. 328, № 11. — [С. 126-138]. |
| Abstract: | Актуальность исследования обусловлена необходимостью решения проблем обеспечения энергоэффективных режимов работы тяговых электроприводов подземного электровоза, используемого для транспортировки руды черных и цветных металлов в рудниках от места добычи к месту складирования для дальнейшей транспортировки на поверхность. Одной из главных задач подземного рельсового транспорта является достижение предельных тяговых характеристик частотно-регулируемых асинхронных двигателей в условиях ограничения величины питающего напряжения контактной сети постоянного тока подземного транспорта по соображениям электробезопасности. Цель работы: исследование возможности использования асинхронных двигателей с пониженным напряжением питания для тягового электропривода подземного рудничного электровоза; определение условий соответствия механических характеристик тягового асинхронного двигателя с пониженным напряжением питания относительно характеристик при стандартном напряжении.  Для обеспечения вибро- и ударопрочности обосновано изменение конструкции тягового асинхронного двигателя с заменой литого чугунного корпуса на сварной из стали с дополнительными опорами для крепления к раме электровоза. Для обеспечения вибро- и ударопрочности обосновано изменение конструкции тягового асинхронного двигателя с заменой литого чугунного корпуса на сварной из стали с дополнительными опорами для крепления к раме электровоза. Object of research: traction induction motor with reduced supply voltage, increased tractive effort and low sensitivity to vibration and shocks. Research methods. The research was performed by analyzing the analytical dependences of induction motor characteristics and simulation results in the Simulink/MatLab. The comparison was carried out at static and dynamic characteristics, energy performance and structural features of the considered motors. Results. A special crane induction motor, produced by «Sibelektromotor», designed for frequency regulation of speed, was selected as a prototype of induction traction motor. The paper introduces the method for calculating the equivalent circuit parameters of induction traction motor by passport data at reduced voltage to the stator; its simulation model was designed. The principal mechanical and electromechanical properties and characteristics of traction induction motor with the switching scheme of connection of phase windings of the stator from the «star» to «triangle», recalculated to a low voltage, correspond to characteristics of induction traction motor with standard voltage. Object of research: traction induction motor with reduced supply voltage, increased tractive effort and low sensitivity to vibration and shocks. Research methods. The research was performed by analyzing the analytical dependences of induction motor characteristics and simulation results in the Simulink/MatLab. The comparison was carried out at static and dynamic characteristics, energy performance and structural features of the considered motors. Results. A special crane induction motor, produced by «Sibelektromotor», designed for frequency regulation of speed, was selected as a prototype of induction traction motor. The paper introduces the method for calculating the equivalent circuit parameters of induction traction motor by passport data at reduced voltage to the stator; its simulation model was designed. The principal mechanical and electromechanical properties and characteristics of traction induction motor with the switching scheme of connection of phase windings of the stator from the «star» to «triangle», recalculated to a low voltage, correspond to characteristics of induction traction motor with standard voltage. To ensure vibration and shock resistance the authors justified a change in the design of induction traction motor with replacement of cast iron housing on the welded steel housing with additional supports for fixing to the frame of the locomotive. To ensure vibration and shock resistance the authors justified a change in the design of induction traction motor with replacement of cast iron housing on the welded steel housing with additional supports for fixing to the frame of the locomotive. |
| URI: | http://earchive.tpu.ru/handle/11683/44740 |
| ISSN: | 2413-1830 |
| Appears in Collections: | Известия ТПУ |
Items in DSpace are protected by copyright, with all rights reserved, unless otherwise indicated.
Новый тяговый электродвигатель разработали и испытали в Новосибирске / Интерфакс
«В феврале на Тульском заводе горно-шахтного оборудования начались первые испытания электровозов с новым тяговым электродвигателем. Разработанный учеными НГТУ электродвигатель смог решить не только проблему импортозамещения, но и позволил увеличить производительность новой машины до 50% «, — говорится в сообщении.
Отмечается, что производительность удалось повысить благодаря энергоэффективной литийионной батареей от «Лиотех» (проект АО «Роснано»). Так, КПД тягового электропривода с вентильным магнитоэлектрическим двигателем увеличился на 10-20 % по сравнению с электроприводом двигателя предыдущего поколения.
Запрос на разработку отечественного электродвигателя поступил в феврале 2018 года от Тульского завода горно-шахтного оборудования. Первые испытания прошли в самом НГТУ и показали, что мощность получилось развить больше заявленной. Второй этап испытаний разработки прошел в Томске, где инженеры компании ООО «НФП Мехатроника-Про» занимались созданием системы управления для двигателя.
Разработчики отметили, что новая технология позволила не только сократить массу и габариты тягового двигателя, но и увеличить его грузоподъемность. Также значительно возросла и энергоэффективность электровоза из-за уменьшения потерь в двигателе. При этом уменьшился разряд аккумуляторной батареи и увеличилось время работы электровоза.
«В настоящее время новый электровоз проходит приемо-сдаточные испытания в реальных условиях работы в шахтах. Электродвигатель имеет свою особенность: он должен быть взрывозащищенным, что требуется для обеспечения безопасности проведения работ в шахтах. Специальная оболочка не позволяет взрыву выйти за пределы двигателя. Если испытания пройдут успешно, начнется запуск производства новых электродвигателей», — уточняется в сообщении.
По словам разработчиков, электрические машины, сконструированные по этой технологии, могут быть использованы как в общепромышленном электроприводе (станки, вентиляционные системы), так и в специализированном (для автомобильной промышленности, авиации, в электроприводе погружных насосов и т. д.), а также в качестве инверторных генераторов.
Электровоз Электродвигатели тяговые — Энциклопедия по машиностроению XXL
При заводском ремонте первого объема разбирают, проверяют и ремонтируют тележки, колесные нары, кузова, тормозное и пневматическое оборудование и электрическую аппаратуру. На электровоз устанавливают тяговые электродвигатели и вспомогательные машины, ранее прошедшие заводской ремонт.
[c.86]
На электровоз устанавливают тяговые электродвигатели и вспомогательные машины, ранее прошедшие заводской ремонт.
[c.86]ОГРАНИЧЕНИЕ СИЛЫ ТЯГИ ЭЛЕКТРОВОЗА ПО ТЯГОВЫМ ЭЛЕКТРОДВИГАТЕЛЯМ [c.51]
Электропоездом называется подвижная единица, состоящая из моторных и прицепных (головных) вагонов, предназначенная для перевозки пассажиров на электрифицированных направлениях железных дорог и метрополитенах. Источником питания электропоезда является электрическая энергия, получаемая через контактную сеть или третий рельс (на метрополитенах). Преобразование электрической энергии в механическую производится на электропоездах так же, как и на электровозах, посредством тяговых электродвигателей. [c.184]
На рис. 33 приведена схема, поясняющая возникновение блуждающих токов. Ток от тяговой подстанции 4 приводит в движение электродвигатель электровоза 5 и возвращается к подстанции по рельсам 1.
 Однако по рельсам протекает лишь часть тока, другая часть, достигающая 20 7о от общего тягового тока, возвращается к тяговой подстанции через землю, так как изоляция рельсов от земли несовершенная, причем чем больше расстояние между тяговыми подстанциями, чем меньше сечение рельса и хуже он изолирован от земли, тем больше утечка токов в землю. Эти токи, распространяясь по земле, попадают в подземные металлические сооружения 3 (в месте входа токов образуется катодная зона— потенциал сооружения смещается в отрицательную сторону). На участках сооружения, проходящих около тяговой подстанции, ток из сооружения стекает в землю, здесь на сооружении возникает анодная зона — потенциал сооружения смещается в положительную сторону. Б анодной зоне происходит интенсивный процесс коррозионного разрушения металла.
[c.77]
Однако по рельсам протекает лишь часть тока, другая часть, достигающая 20 7о от общего тягового тока, возвращается к тяговой подстанции через землю, так как изоляция рельсов от земли несовершенная, причем чем больше расстояние между тяговыми подстанциями, чем меньше сечение рельса и хуже он изолирован от земли, тем больше утечка токов в землю. Эти токи, распространяясь по земле, попадают в подземные металлические сооружения 3 (в месте входа токов образуется катодная зона— потенциал сооружения смещается в отрицательную сторону). На участках сооружения, проходящих около тяговой подстанции, ток из сооружения стекает в землю, здесь на сооружении возникает анодная зона — потенциал сооружения смещается в положительную сторону. Б анодной зоне происходит интенсивный процесс коррозионного разрушения металла.
[c.77]Мотор-вентиляторы МВ1-МВ4 предназначены для охлаждения тяговых двигателей колесных пар, для охлаждения электрооборудования электровоза и вентиляции его кузова. Частота вращения электродвигателей вентиляторов составляет 1470 об/мин. Масса каждого вентилятора 390-400 кг. Каждый вентилятор установлен на четырех опорах.
[c.124]
Частота вращения электродвигателей вентиляторов составляет 1470 об/мин. Масса каждого вентилятора 390-400 кг. Каждый вентилятор установлен на четырех опорах.
[c.124]
Рекуперативное торможение на электровозах постоянного тока при допускаемой скорости на спуске 15—25 клг/ч осуществляется на последовательном соединении тяговых электродвигателей и при допускаемой скорости 25—35 км/ч на последовательно-параллельном. [c.159]
ЛФЧ-ББ 0,10 То же 50—40 I-II Корпусная изоляция секций электродвигателей электровозов и тепловозов и тяговых генераторов Корпусная изоляция секций электродвигателей электровозов и тепловозов и тяговых генераторов Корпусная изоляция секций и катушек тяговых двигателей [c.145]
Железнодорожные и трамвайные буксы, коленчатые валы двигателей, электродвигатели мощностью более 100 кВт, крупные тяговые электродвигатели, ходовые колеса мостовых кранов, ролики рольгангов прокатных станов, дробильные машины, буксы тепловозов и электровозов, дорожные машины, экскаваторы, манипуляторы прокатных станов, шаровые дробилки, вибраторы, грохоты, инерционные транспортеры
[c. 234]
234]
Вспомогательные электрические машины приводят в движение компрессоры, питающие сжатым воздухом пневматическую и тормозную сеть локомотива, центробежные вентиляторы, охлаждающие тяговые электродвигатели, аппаратуру, различные насосы, генераторы управления и генераторы преобразователей. На электровозах и электропоездах постоянного тока в качестве вспомогательных машин применяются коллекторные электродвигатели постоянного тока. На 18 [c.18]
Охлаждаются тяговые электродвигатели воздухом, нагнетаемым центробежными вентиляторами, установленными в кузове электровоза. [c.19]
Основные данные полюсных катушек тяговых электродвигателей и вспомогательных машин электровозов [c.22]
Для тяговых электродвигателей электровозов и электропоездов постоянного тока применяют изоляторы с заводским № 2269, для электровозов переменного тока — №5531, а для большинства вспомогательных машин — № 2997 (табл. 5).
[c.24]
5).
[c.24]
Групповой контактор (групповой контроллер или групповой переключатель) предназначен для переключения тяговых электродвигателей и пусковых сопротивлений в силовых цепях электровозов и электропоездов постоянного тока. На электровозах переменного тока эти аппараты переключают обмотки силового трансформатора. [c.45]
Контроллер машиниста предназначен для дистанционного управления тяговыми электродвигателями и является наиболее сложным и ответственным низковольтным аппаратом электроподвижного состава. По конструкции контроллеры бывают кулачкового, кулачково-барабанного и барабанного типов. На электровозах и электропоездах по- [c.71]
Контроллер машиниста типа КМЭ-8Б (рис. 49) электровоза ВЛ8 имеет корпус, состоящий из стального литого основания 1, чугунной крышки 6, соединенных между собой стальными рейками прямоугольного сечения, и кожуха 2. Между крышкой 6 и основанием 1 на шарикоподшипниках установлены два кулачковых вала. Изменение вращения тяговых электродвигателей и выбор схемы их соединения на тормозном режиме осуществляются двумя кулачковыми барабанами, которые посажены на подшипниках на главном 4 и тормозном 5 валах. Оба барабана управляются одной реверсивно-селективной рукояткой 7. Для предотвращения ошибочных действий при работе все три рукоятки связаны механической блокировкой 3. Кулачковые шайбы и кулачки,
[c.71]
Изменение вращения тяговых электродвигателей и выбор схемы их соединения на тормозном режиме осуществляются двумя кулачковыми барабанами, которые посажены на подшипниках на главном 4 и тормозном 5 валах. Оба барабана управляются одной реверсивно-селективной рукояткой 7. Для предотвращения ошибочных действий при работе все три рукоятки связаны механической блокировкой 3. Кулачковые шайбы и кулачки,
[c.71]
Технический осмотр электровозов (ТО) предусматривает осмотр основного оборудования и ходовых частей электровоза, в том числе моторно-осевых подшипников, бандажей колесных пар, тяговых электродвигателей, пантографов и грозозащитной аппаратуры. [c.85]
Запасные части тяговых электродвигателей тепловозов аналогичны запасным частям электровозов. [c.116]
Тяговые электродвигатели тепловоза, предназначенные для приведения колесных пар во вращение, выполняются обычно с последовательным возбуждением и принудительной вентиляцией (рис.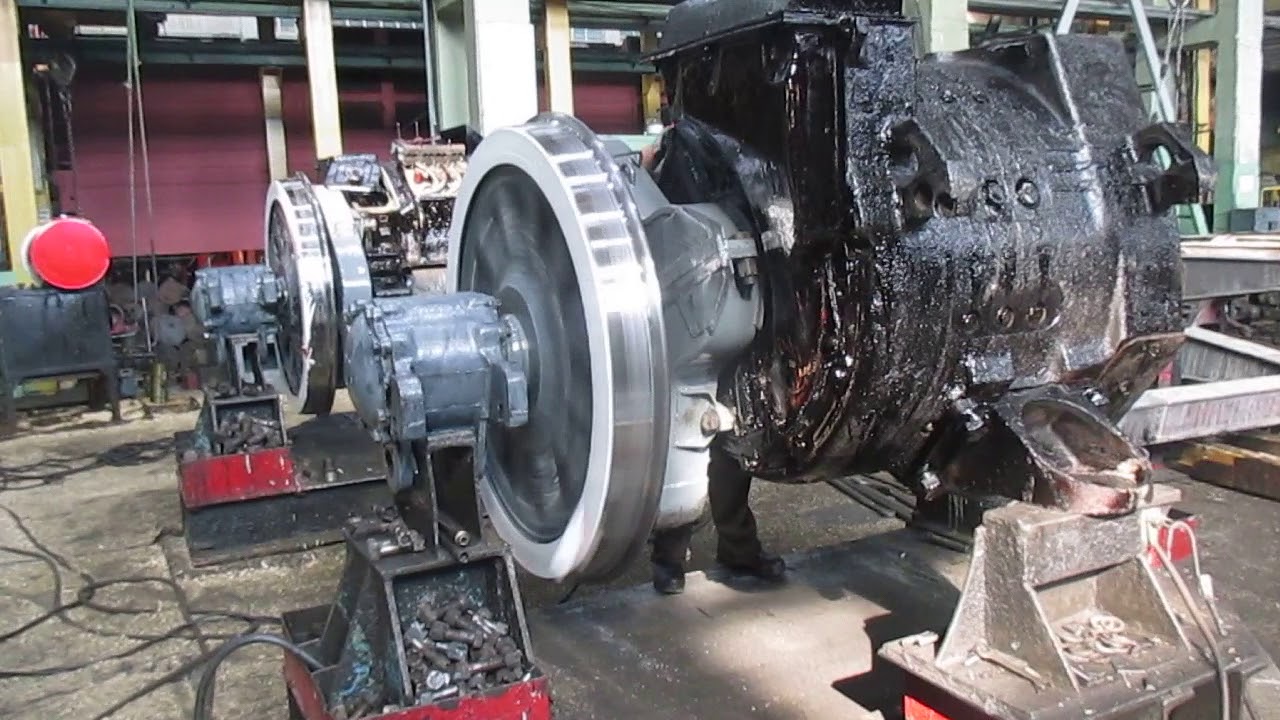 131). Остов электродвигателя отлит из углеродистой магнитопроводной стали в форме восьмигранника с приливом для моторно-осевых подшипников. Якорь электродвигателя вращается на роликовых подшипниках в съемных подшипниковых щитах. Электродвигатели выполняют, как правило, четырехполюсными. В отличие от электровозов электродвигатели тепловозов имеют сравнительно низкое напряжение на коллекторе (275—350 В), но гораздо больший ток (800—2000 А). Максимальная мощность тяговых электродвигателей постоянного тока современных грузовых тепловозов достигает 400 кВт (500 л. с.), а пассал[c.228]
131). Остов электродвигателя отлит из углеродистой магнитопроводной стали в форме восьмигранника с приливом для моторно-осевых подшипников. Якорь электродвигателя вращается на роликовых подшипниках в съемных подшипниковых щитах. Электродвигатели выполняют, как правило, четырехполюсными. В отличие от электровозов электродвигатели тепловозов имеют сравнительно низкое напряжение на коллекторе (275—350 В), но гораздо больший ток (800—2000 А). Максимальная мощность тяговых электродвигателей постоянного тока современных грузовых тепловозов достигает 400 кВт (500 л. с.), а пассал[c.228]
Поэтому при срабатывании реле РП23 линейные контакторы не выключаются. Их выключение происходит только под воздействием реле моторного тока, которое размыкает свои контакты после наполнения тормозных цилиндров электровоза сжатым воздухом, снятия возбуждения с тяговых электродвигателей и при переходе электровоза в тяговый режим. [c.99]
Циркуляционное пли колеба-.
 тельное (вращающийся вал) Т яжелый г ударными нагрузками (Р > > 0,15С) Ролико- вые Св. 50 до 100 100 . 140 140 250 п6 пб р6 р6 г6 г7 — Железнодорожные и трамвайные буксы, коленчатые валы двигателей, электродвигатели мощностью св. 100 кВт, крупные тяговые электродвигатели, ходовые колеса мостовых крапов, ролики рольгангов тяжелых станков, дробильные машины, буксы тепловозов и электровозов, дорожные машины, экскаваторы, манипуляторы прокатных станов, шаровые дробилки, вибраторы, грохоты, инерционные транспортеры
[c.235]
тельное (вращающийся вал) Т яжелый г ударными нагрузками (Р > > 0,15С) Ролико- вые Св. 50 до 100 100 . 140 140 250 п6 пб р6 р6 г6 г7 — Железнодорожные и трамвайные буксы, коленчатые валы двигателей, электродвигатели мощностью св. 100 кВт, крупные тяговые электродвигатели, ходовые колеса мостовых крапов, ролики рольгангов тяжелых станков, дробильные машины, буксы тепловозов и электровозов, дорожные машины, экскаваторы, манипуляторы прокатных станов, шаровые дробилки, вибраторы, грохоты, инерционные транспортеры
[c.235]Обеспечение надежной поездной работы электровозов и повышение их технико-экономически показателей зависят в первую очередь от технического уровня тяговых двигателей. В последние годы скорость и сила тяги электровозов увеличилась почти на 40%, что резко повысило тепловую и механическую напряженность узлов тяговых электродвигателей, осложнило коммутацию. Наибвльшую трудность представляет собой задача повышения их коммутационной надежности, которая определяется электромагнитными, потенциальными и механическими условиями. [c.144]
[c.144]
В тепловозе генератором энергии являетея двигатель внутреннего сгорания, который производимую работу передаёт колёсам локомотива при помощи передач электрической, механической, гидромеханической и пр. Таким образом тепловоз состоит из двигателя, передачи и экипажа, В газотурбивозе двигатель внутреннего сгорания заменяется газовой турбиной. Если генератор энергии — паровой котёл и машина или двигатель внутреннего сгорания и коробка передачи размещены в пассажирском вагоне, то такой локомотив называется автомотрисой. Электровоз получает питание от центральной электростанции электрическая энергия преобразуется в механическую работу локомотива тяговыми электродвигателями. [c.217]
На участках, где применяется рекуперативное торможение, перед выездом из депо под поезд машинист на электровозе, имеющем рекуперативное оборудование, должен проверить его работу. Для этой цели при поднятом токоприемнике и включенном быстродействующем выключателе на электровозе ВЛ22 пускается возбудитель, селективная рукоятка устанавливается в одно из поло жений соединения тяговых электродвигателей (последовательное, последовательно-параллельное или параллельное) и краном вспомогательного тормоза повышается давление в тормозных цилиндрах электровоза до 1,5 KPf M . После этого главную рукоятку контроллера переводят из нулевого положения на 1-ю позицию, в которой должна собраться схема моторного режима. Затем тормозную рукоятку переводят на 1-ю позицию, при которой схема моторного режима должна разобраться, а схема тормозного режима собраться. При этом амперметры цепи якоря и цепи обмоток возбуждения тяговых двигателей доллсны показывать величину тока около 100 а в цепи якоря и 70 а в цепи возбуждения.
[c.33]
После этого главную рукоятку контроллера переводят из нулевого положения на 1-ю позицию, в которой должна собраться схема моторного режима. Затем тормозную рукоятку переводят на 1-ю позицию, при которой схема моторного режима должна разобраться, а схема тормозного режима собраться. При этом амперметры цепи якоря и цепи обмоток возбуждения тяговых двигателей доллсны показывать величину тока около 100 а в цепи якоря и 70 а в цепи возбуждения.
[c.33]
Как правило, применять контрток на тепловозах и электровозах запрещается, так как при этом резко увеличивается ток в якорях тяговых электродвигателей, что приводит к сгоранию их обмоток и выходу из строя локомотива. Однако, когда использованы все тормозные средства для остановки поезда и дальнейшему движению его угрожает опасность крушения, а применением контртока оно может быть предотвращено, то целесообразно его применить, в особенности на малых скоростях движения (15 кж/ч и менее). [c.92]
Осерненная смазка для локомотивов (по ТУ 32 ЦТ-006—68) представляет собой осерненное трансмиссионное автотракторное масло, загущенноа натриевым мылом гудронного сала. Ее применяют для смазывания зубчатой передачи тяговых электродвигателей тепловозов и электровозов. Она вырабатывается двух марок Л (летняя) и 3 (зимняя). Качество осернен-ной смазки должно удовлетворять требованиям, изложенным в табл. 48. Осерненная смазка поставляется потребителю в железнодорожных цистернах или в металлических емкостях не более 200 л.
[c.121]
Ее применяют для смазывания зубчатой передачи тяговых электродвигателей тепловозов и электровозов. Она вырабатывается двух марок Л (летняя) и 3 (зимняя). Качество осернен-ной смазки должно удовлетворять требованиям, изложенным в табл. 48. Осерненная смазка поставляется потребителю в железнодорожных цистернах или в металлических емкостях не более 200 л.
[c.121]
Прецизионные зубчатые передачи. Металлорежущие станки (кроме строгальных, долбежных и шлифовальных). Гироскопы. Механизмы подъема кранов. Электротали и монорельсовые Геяежкй. Лебедки с механическим приводом. Электродвигатели малой н средней мощности. Легкие вентиляторы и воздуходувки Зубчатые передачи. Редукторы всех типов. Буксы рельсового подвижного состава. Механизмы передвижения крановых тележек. Механизмы поворота кранов. Механизмы изменения вылета стрелы кранов. Шпиндели шлифовальных станков. Элек-трошпиидели Центрифуги и сепараторы. Буксы и, тяговые двигатели электровозов Механизмы передвижения кранов.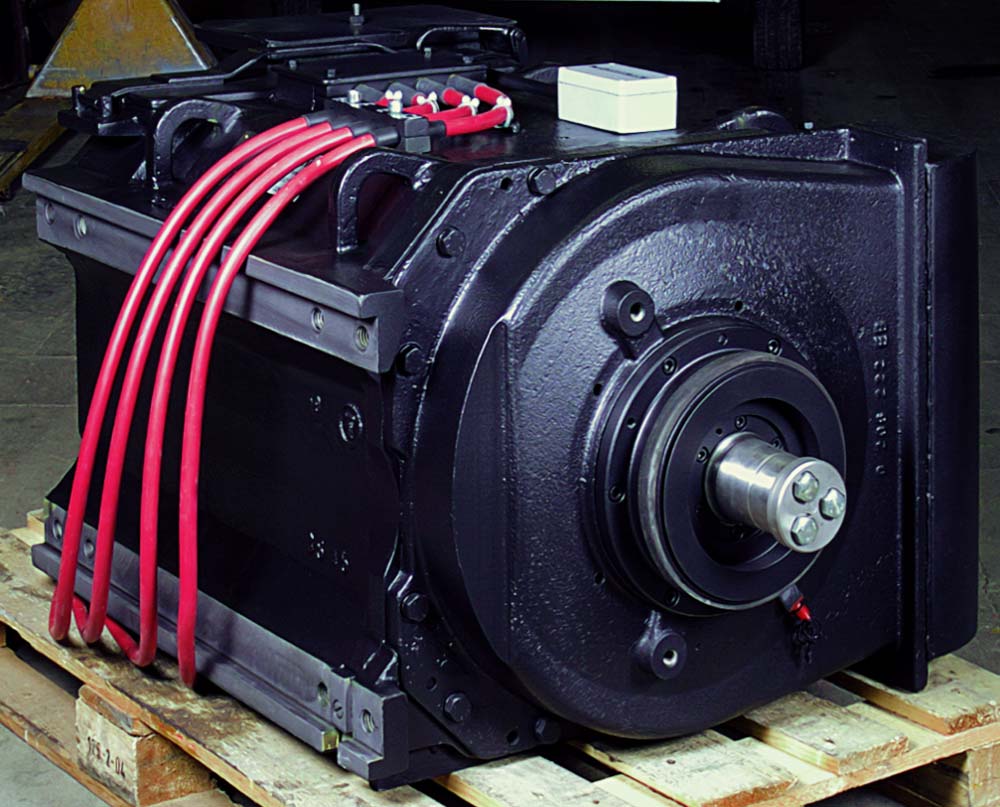 Ходовые колеса те лежек и опоры механизмов поворота кра нов и экскаваторов. Мощные электриче ские машины. Энергетическое оборудова ние. Кодовые колеса механизмов передай жения кранов и дорожных машин Зубчатые колеса. Дробилки в копры. Кривошипно-шатунные механизмы. Валки и адъюстаж прокатных станов. Мощные вентиляторы и эксгаустеры
[c.44]
Ходовые колеса те лежек и опоры механизмов поворота кра нов и экскаваторов. Мощные электриче ские машины. Энергетическое оборудова ние. Кодовые колеса механизмов передай жения кранов и дорожных машин Зубчатые колеса. Дробилки в копры. Кривошипно-шатунные механизмы. Валки и адъюстаж прокатных станов. Мощные вентиляторы и эксгаустеры
[c.44]
Первые отечественные электровозы постоянного тока В Л19 были построены в 1932 г. На базе этих электровозов до 1958 г. выпускались электровозы ВЛ22 мощностью 2 400 кет. С 1956 г. на дороги начали поступать грузовые восьмиосные электровозы ВЛ8 мощностью 4 200 кет и шестиосные электровозы ВЛ23 мощностью 3 150 кет. Ряд узлов механического оборудования — колесные пары, зубчатая передача, а также тяговые электродвигатели и значительная часть электрических аппаратов электровозов ВЛ8 и ВЛ23 — был унифицирован. [c.3]
Основными запасными частями механического оборудования электровоза являются колесные пары, малые шестерни тягового электродвигателя, зубчатые колеса и кожуха зубчатой передачи, рессоры, пружины, рессорные стойки, вкладыши моторно-осевых подшипников, детали межтележечных ишрнириых соеди1 еиий — шкворни, гнезда шаров, шары и втулки.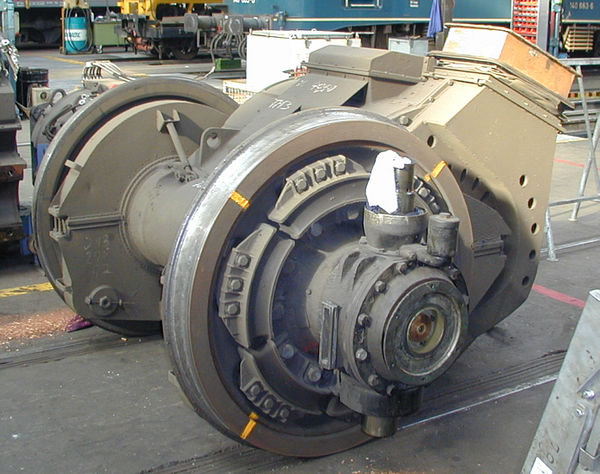 [c.7]
[c.7]
Буксы служат для передачи веса кузова, рам тележек и части веса тяговых электродвигателей на оси колесных пар, а также для передачи тягового и тормозного усилия от колесных пар на раму тележек. На электровозах ВЛ22 применяют буксы с подпшпниками скольже-12 [c.12]
Электрические машины электроподвижного состава по своему назначению подразделяются на тяговые электродвигатели и вспомогательные машины. Тяговые электродвигатели, получая от контактной сети электрическую энергию, преобразуют ее в механическую энергию, передавая вращающий момент с вала электродвигателя на колесную пару у электровозов одноступенчатой зубчатой передачей, у электропоездов — редуктором и кулачковой муфтой. На электропоездах ЭР22 и ЭР9п кулачковая муфта заменена упругой муфтой с резинокордовой оболочкой. На электровозах и моторвагонных секциях тяговые электродвигатели имеют опорно-осевую подвеску, а на электропоездах — опорно-рамную. Каждый отдельный тяговый электродвигатель приводит в движение одну колесную пару.
[c.18]
Каждый отдельный тяговый электродвигатель приводит в движение одну колесную пару.
[c.18]
Рассмотрим устройство тягового электродвигателя электровозов ВЛ23 и ВЛ8 (рис. 12). Тяговый электродвигатель типа НБ-406Б, применяемый иа этих электровозах, имеет стальной литой остов 2, который является одновременно магнитопроводом и корпусом. Внутри остова 2 закреплены по четыре сердечника главных 11 и дополнительных 13 полюсов с катушками 12 и 14, четыре щеткодержателя, подшипниковые щиты роликовыми подшипниками, в которых вращается якорь двигателя. На одной из наружных стенок остова расположены приливы 10 для крепления букс моторно-осевых подшипников скользящего типа, а с противоположной стороны — приливы 16, которыми двигатель через пружинное устройство опирается на поперечную балку тележки. Якорь двигателя 15 состоит из секций обмотки I, вложенной в пазы сердечника 4, собранного в пакет из тонких листов стали, коллектора 7, стальной втулки с задней нажимной шайбой 6, передней нажимной шайбы 9 и вала 5. Коллектор якоря набран из медных пластин специального профиля, изолированных микани-товыми прокладками. Для обмоток якоря и катушек полюсов используется шинная медь.
[c.19]
Коллектор якоря набран из медных пластин специального профиля, изолированных микани-товыми прокладками. Для обмоток якоря и катушек полюсов используется шинная медь.
[c.19]
Вкладыши как запасные части поставляют в виде литья, изготовленного из латуни марки ЛКС80-3-3. Механическую обработку вкладышей и заливку их баббитом производят непосредственно в депо и на локомотиворемонтных заводах. Комплект вкладышей из двух половинок для тяговых электродвигателей электровоза ВЛ22 весит [c.23]
В зависимости от типа электрических машин кронштейны щеткодержателей имеют различную конструкцию. На тяговых электродвигателях электропоездов ЭР22 и ЭР9и вместо стальных корпусов кронштейнов установлены пластмассовые, а на электровозах переменного 24 [c.24]
Электропневматические контакторы используют на электроподвиж-ном составе в электрических цепях тяговых электродвигателей, а на электровозах переменного тока — еще и в цепях выпрямительных устройств. Такие контакторы позволяют пропускать ток больших величин (до 500 а) нри давлении на рабочих контактах не менее 27 кГ.
[c.33]
Такие контакторы позволяют пропускать ток больших величин (до 500 а) нри давлении на рабочих контактах не менее 27 кГ.
[c.33]
Главный контроллер типа ЭКГ-8А (рис. 30) электровоза переменного тока ВЛ60 — наиболее сложный групповой переключатель кулачкового типа. Он предназначен для ступенчатого переключения напряжения в цепи тяговых электродвигателей и состоит из двух аппаратов, собранных в один агрегат переключателя обмоток и переключателя ступеней силового трансформатора. Каждый из аппаратов имеет независимый вал с кулачковыми шайбами. Кулачковые валы вращаются электрическим двигателем через двухступенчатый редуктор. [c.47]
Реле регулируют натяжением пружины 7, которая срабатывает при токе в цепи тягового электродвигателя 800 а, а реле РТ-406В — при токе 625 а. Вес реле 6,7 кг. Реле типа РТ-196 электровоза ВЛбО и типа РТ-253 электровоза БЛЗО незначительно отличаются от реле РТ-410Б. Первое реле срабатывает при токе 800 а, второе — пои токе 1 500 а.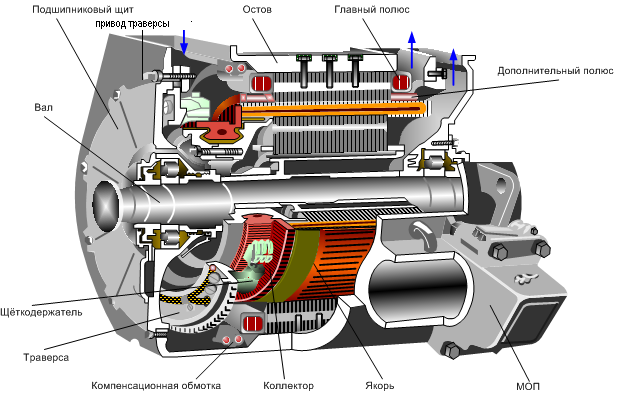 [c.67]
[c.67]
Низковольтная тяговая аппаратура на электровозах и электропоездах предназначена для дистаициоипого управления тяговыми электродвигателями, управления пантографами и электромагнитными контакторами, включающими вспомогательные электрические машины, отопление и освещение, а также для поддержания необходимого давления воздуха и других переключений. [c.70]
На «Уральских локомотивах» приступили к опытной сборке узлов принципиально нового грузового электровоза 2ЭС6А
25.01.2021На заводе «Уральские локомотивы» для нового электровоза с отечественным асинхронным двигателем 2ЭС6А проведена опытная сборка колесно-моторного блока (КМБ) — важнейшего узла ходовой части локомотива, состоящего из тягового электродвигателя, зубчатой передачи и колесной пары, сообщает пресс-центр Группы Синара.
КМБ предназначен для трансляции тяговой мощности (крутящего момента) электродвигателя и весовой нагрузки локомотива на колесную пару. Опытная сборка выявляет «узкие места», которые могли быть не учтены при разработке.
Опытная сборка выявляет «узкие места», которые могли быть не учтены при разработке.
Специалисты «Уральских локомотивов» и компании-разработчика асинхронного двигателя — «Тяговые компоненты» (входит в холдинг Синара — Транспортные Машины) определили необходимые улучшения в плане конструкции КМБ и технологичности его сборки. В рамках проводимых мероприятий были проверены технические решения: собираемость и пятно контакта зубчатой передачи, ее геометрия и собираемость кожухов. По итогам опытной сборки будет откорректирована конструкторская документация.
По сравнению с уже выпускаемым на заводе подвижным составом, элементы колесно-моторного блока нового электровоза 2ЭС6А отличаются более совершенной конструкцией и применением принципиально новых решений. Так, корпус моторно-осевых подшипников — разъемный, что позволяет при расформировании колесной пары высвободить подшипник, чтобы минимизировать повреждаемость оси. Также это дает возможность выполнять осмотр подшипника, состояние его тел качения, внутреннего и наружного кольца и помогает оперативно продлевать ресурс колесной пары. Конструкторы заложили в 2ЭС6А ресурс 1,8 млн километров пробега, что на 50% выше, чем у локомотива серии 2ЭС6.
Конструкторы заложили в 2ЭС6А ресурс 1,8 млн километров пробега, что на 50% выше, чем у локомотива серии 2ЭС6.
Новый отечественный асинхронный двигатель, который будет применяться в локомотиве, намного легче двигателей электровозов 2ЭС6 и 2ЭС10, что повышает эксплуатационные характеристики нового локомотива, снижает его воздействие на путь, уменьшает износ бандажа и увеличивает межремонтные пробеги. Двигатель — бескорпусного исполнения, его магнитопровод является частью несущей конструкции и не может быть демонтирован. Это облегчает и упрощает обслуживание электровоза. В конструкции также применены зубчатые колеса высокой точности с цементацией из легированной стали 20Х2Н4А, что будет способствовать увеличению их ресурса.
«Благодаря опытной сборке, к моменту комплектации первого номера нового электровоза 2ЭС6А специалисты завода уже будут иметь необходимый опыт и устранят выявленные недочеты конструкции. Следующим этапом станет опытная сборка тележки. В настоящее время разрабатывается конструкторская документация на раму тележки, которая будет проверена на свариваемость, собираемость, также отрабатывается технология сварки. Опытный образец принципиально нового локомотива 2ЭС6А планируется представить в декабре 2021 года», — цитирует пресс-служба генерального директора «Уральских локомотивов» Олега Спаи.
Опытный образец принципиально нового локомотива 2ЭС6А планируется представить в декабре 2021 года», — цитирует пресс-служба генерального директора «Уральских локомотивов» Олега Спаи.
«Уральские локомотивы» (Верхняя Пышма, Свердловская область) специализируется на проектировании, производстве и техническом обслуживании подвижного состава нового поколения.
Завод серийно выпускает грузовые магистральные электровозы постоянного тока «Синара» (2ЭС6) с коллекторным тяговым приводом, грузовые магистральные электровозы постоянного тока «Гранит» (2ЭС10) с асинхронным тяговым приводом, магистральные электровозы переменного тока серии 2ЭС7. Второе важнейшее направление работы предприятия — выпуск скоростных электропоездов «Ласточка» различных модификаций.
Вестник ВЭлНИИ
СОДЕРЖАНИЕ — CONTENT
ЭКОНОМИКА
Наймушин В. Г
Г
Причины падения и экономические проблемы возрождения отечественного электровозостроения
Носков А.Л.
Обеспечение электровозами магистральных железных дорог страны
НАУЧНЫЕ РАЗРАБОТКИ
Бахвалов Ю.А., Сорин Л.Н.
Современные технологии расчета электромагнитных полей
Сорин Л.Н., Зарифьян А.А.
Усовершенствованная компьютерная модель динамических процессов в электромеханической системе электровоза
Бирюков И.В., Рыбников Е.К., Соболев Р.Ю., Карюкин А.В.
Особенности динамических свойств системы “рама тележки – тяговый привод класса III” для электропоездов
Коссов В.С., Михальченко Г.С., Погорелов В.А., Симонов Д.Ю.
Исследование способов улучшения ходовой динамики электровозов типа ЭП10
Киреев А. В., Пахомин С.А., Кононов Г.Н.
В., Пахомин С.А., Кононов Г.Н.
Пульсации момента в тяговом реактивном индукторном двигателе и меры по их снижению
Сорин Л.Н., Лещев А.И., Суслова К.Н.
Определение рациональных параметров входных фильтров ЭПС постоянного тока при регулировании напряжения асинхронного тягового двигателя методом широтно-импульсной модуляции
Колпахчьян П.Г., Колпахчьян Г.И.
Математическое моделирование процессов в вентильном тяговом электроприводе
Плакс А.В., Изварин М.Ю.
Параметры коллекторных тяговых электродвигателей при моделировании переходных процессов в цепях электровозов
НОВЫЕ КОНСТРУКТОРСКИЕ РЕШЕНИЯ
Лещёв А.И., Солтус К.П., Усвицкий С.А.
Промышленный электровоз НПМ2 с асинхронными тяговыми двигателями
Копанев А. С., Кинжигазиев В.В.
С., Кинжигазиев В.В.
Особенности электрической схемы и результаты электротехнических испытаний тягового агрегата НП1-001
РЕЗУЛЬТАТЫ ТЕОРЕТИЧЕСКИХ И ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ
Киреев А.В.
Динамические нагрузки в тяговой передаче электропоезда, вызванные пульсациями вращающего момента реактивного индукторного двигателя
Курочка А.А., Кабанов Д.А., Лушникова Л.Д.
Выбор алгоритма широтно-импульсной модуляции в автономном инверторе напряжения промышленного электровоза НПМ2
Ефимов Е.М., Лебедев А.В., Лебедева Н.В., Манако В.В.
Алгоритм управления инвертором тока вентильного тягового привода электровоза ЭП-200
Лебедев А.В., Манако В.В., Парнюк Е.Ю.
Компенсация влияния реакции якоря вентильного тягового двигателя при пуске и малых частотах вращения
Дядичко В. Я., Малышев В.М., Домрачева Е.В.
Я., Малышев В.М., Домрачева Е.В.
Электропоезд постоянного тока с двумя группировками тяговых двигателей
Панасенко В.М.
Программная реализация блока противокомпаундирования
Машинец О.Г., Микуляк С.П., Юренко К.И.
Организация вычислительных устройств микропроцессорных систем управления ЭПС
Логинов И.Я., Кожемяка Н.М.
Защита силового электрооборудования электропоезда ЭН3 в аварийных режимах
Мещеряков В.А.
Кодировка съемных блоков электроники для защиты от их ошибочной установки
Басин Л.Л., Беляев А.В., Капустин М.Ю., Солтус К.П.
Исследование границ токового коридора при управлении четырёхквадрантным преобразователем
Юренко И.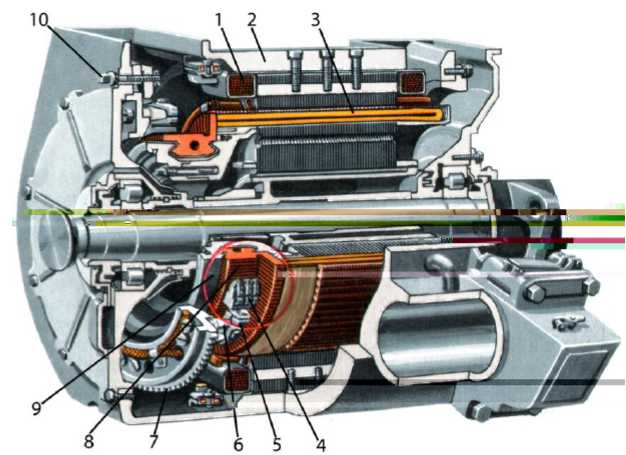 К., Юренко К.И.
К., Юренко К.И.
Нормирование показателей надёжности устройств безопасности электроподвижного состава
Федюков Ю.А., Фошкина С.В.
Оценка демпфирующих свойств магнитопроводов
Хоменко Б.И., Колпахьчян Г.И., Пехотский И.В., Колпахчьян П.Г.
Выбор системы возбуждения тяговых двигателей электровозов постоянного тока в режиме рекуперативного торможения
Пустоветов М.Ю., Пехотский И.В.
Способ учёта нелинейности кривой намагничивания при переменной частоте питающего напряжения
Василенко Г.В.
Об ограничении использования мощности асинхронных тяговых двигателей в эксплуатации при высоких скоростях
Седов В. И.
Потери в проводниках обмотки реактивного индукторного двигателя
Долгошеев Э. А., Степаненко А.С.
А., Степаненко А.С.
Стендовые и эксплуатационные испытания тягового двигателя НБ-520В электровозов ЭП1 и ВЛ65 в режимах рекуперативного торможения
Комарец Т.П.
Тепловой расчет обмотки возбуждения вентильного двигателя
Кулинич Ю. М.
Снижение энергозатрат на испытания тяговых электрических машин
Березинец Н.И., Украинский Ю.М., Рыбалко Б.Е., Родова Л.В.
К вопросу выбора старящих нагрузок при испытаниях систем изоляции для тяговых электрических машин
Сергиенко П.Е.
Определение виброускорений для испытаний тяговых двигателей электровозов
Кравчук В.В., Мешков В.С., Прасков В.В.
К вопросу износа в контакте «колесо-рельс»
ПОВЫШЕНИЕ КАЧЕСТВА, НАДЕЖНОСТИ, ДОЛГОВЕЧНОСТИ
Смирнов В. А., Ермоленко В.В., Мельников В.П.
А., Ермоленко В.В., Мельников В.П.
Дугогасительная камера повышенной отключающей способности на номинальное напряжение 3кв постоянного тока
Пацеура В.И.
Дугогасительная камера быстродействующего выключателя постоянного тока
Орлов А.К., Лунев А.М., Силантьева Т.А.
Защита от износа поверхностей качения в опорных подшипниках тяговых электродвигателей переменного тока
Режко Н.А., Лобов А.В., Турулев В.М.
Система управления электромагнитным подвесом транспортного средства с использованием обратной связи по току
Головач Ю.Н., Кубил В.О.
Управление сорбционными режимами в одноадсорберных короткоцикловых безнагревных установках
Головач Ю.Н., Кубил В.О., Сорин Л.Н.
Исследование термодинамического состояния паровоздушной смеси в пневмомагистралях электровозов
Головач Ю. Н., Кубил В.О.
Н., Кубил В.О.
Исследование и расчет локомотивного спиртоиспарителя
Сысоева Н.Я.
Методика испытания изоляции обмотки статора тягового асинхронного двигателя ДТА-350М в процессе изготовления
Басова Т.Ю., Силантьева Т.А., Коротков В.И.
Усовершенствование рецептуры замазки для герметизации узлов ТЭД с использованием отечественных компонентов
ЭКОЛОГИЯ И ВОПРОСЫ БЕЗОПАСНОСТИ
Москалев Б.А.
Дозовая оценка воздействия физических производственных факторов на локомотивные бригады
Лозин И.Г.
Спектральный состав электромагнитных излучений электротранспорта
Савинов К.Ю., Кондратьев В.А.
Новые системы тепло — и звукоизоляции кабин машиниста ЭПС
Ремонт тяговых электродвигателей электровозов и локомотивов
Назначением тяговых электросиловых моторов является обеспечение движения автотранспортных средств и машин специального назначения, в том числе:
- электропоездов;
- тепловозов;
- трамваев;
- троллейбусов;
- производственных самоходных машин;
- кранов.


Конструктивной особенностью тяговых двигателей являются малые габариты: двигатель должен вписаться в ограниченное пространство конструкции техники. Ключевым требованием к таким двигателям является обеспечение бесперебойной работы в условиях:
- повышенной влажности;
- повышенной запыленности;
- повышенной загазованности;
- вибрации;
- механических нагрузок (статических и динамических).
Тяговые электродвигатели рассчитаны на многофункциональный режим работы — кратковременный или долговременный с частыми пусками и остановками. Реальная нагрузка в процессе эксплуатации зачастую превышает расчетную в два и более раза. Тяговые двигатели относятся к разряду взрывозащищенных и должны обеспечивать максимально безопасное использование.
Компания Promenergo профессионально специализируется на ремонте и обслуживании тяговых двигателей. В своей работы мы используем высокотехнологичное оборудование, гарантируя высокое качество ремонта и бесперебойную эксплуатацию техники в дальнейшем.
Ремонт двигателей пассажирского транспорта
Кроме тяговых, наша компания выполняет ремонт следующих электросиловых двигателей:
1) Троллейбусное оборудование серий ДК-210, 213 (110 кВт), ДК-211 (170 кВт), ДК-408, ДК-410 (3-5 кВт), ДК-661 (2-8 кВт), в том числе ремонтно-восстановительные работы двигателя:
- с заменой обмотки якоря;
- с частичным ремонтом магнитной системы и коллектора;
- с капитальным ремонтом магнитной системы;
- с частичным ремонтом щеточной системы;
- с заменой коллектора и частичным ремонтом щеточного механизма;
- с изготовлением комплекта секций;
- с балансировкой;
- с реставрацией вала;
- с заменой щеточного механизма и изоляторов;
- с заменой выводных концов.
2) Трамвайное электросиловое оборудование серий ДК-259, ТЕ-022, ТЕ-023, ТЕ–026, в том числе ремонтно-восстановительные работы двигателя:
- с заменой подшипников и частичным ремонтом коллектора;
- с частичным ремонтом магнитной системы;
- с заменой щеточного механизма и изоляторов выводных концов с заменой уплотнений;
- с восстановлением вала и щитов;
- капитальный ремонт магнитной системы электродвигателей;
- с балансировкой якоря.

Кроме вышеперечисленного перечня, наша компания предоставляет сертифицированные услуги по ремонту трансформаторов, насосов и компрессорного оборудования.
Тяговые двигатели тепловозов
14 марта 2016 г., Опубликовано в статьях: EE Publishers, Статьи: Energize, Статьи: Vector, Рекомендуемые: Energize
Майка Райкрофта, редактора функций, EE Publishers
Железнодорожный транспорт снова становится популярным для перевозки грузов на большие расстояния.В этой статье рассматривается роль электродвигателей в этом секторе транспортной отрасли.
Используются два типа локомотивов: чисто электрический, который питается от контактного провода среднего напряжения и ограничен в использовании для поездок на большие расстояния, и локомотив с приводом от дизельного двигателя, который может использоваться для всех типов операций. в том числе маневровые. В этой статье рассказывается о тепловозе.
Название «тепловоз» вводит в заблуждение, поскольку тяговое усилие обеспечивается электродвигателями, приводящими в движение колеса напрямую, а электричество для питания двигателей вырабатывается генератором переменного тока, приводимым в действие дизельным двигателем. Использование дизельного двигателя освобождает локомотив от подключения к внешнему источнику электроэнергии, а использование электродвигателей и приводов позволяет контролировать тяговые возможности локомотива, что было бы невозможно при прямом приводе от дизельного двигателя.
Использование дизельного двигателя освобождает локомотив от подключения к внешнему источнику электроэнергии, а использование электродвигателей и приводов позволяет контролировать тяговые возможности локомотива, что было бы невозможно при прямом приводе от дизельного двигателя.
Электродвигатели тяговые
Двигатели могут быть установлены в нескольких различных конфигурациях:
- Управление тележкой или тележкой : Один двигатель приводит в движение все колеса тележки или тележки, обычно четыре колеса на мотор.
- Управление осью : Двигатель приводит в движение оба колеса на одной оси. Это наиболее распространенная конфигурация (см. Рис. 1).
- Управление колесом : Каждое колесо приводится в движение собственным двигателем. Это позволяет максимально контролировать локомотив, но используется не часто.
В локомотивах используются три типа двигателей:
- Двигатели постоянного тока.
- Двигатели переменного тока с частотно-регулируемыми приводами.
- Двигатели переменного тока с постоянными магнитами.

Основные требования к двигателю локомотива заключаются в том, что он должен иметь возможность изменять и контролировать скорость, а также обеспечивать пусковой и ускоряющий момент. Ранние локомотивы использовали двигатели постоянного тока, поскольку они были единственным типом больших двигателей, которые могли обеспечивать управление скоростью и требуемый крутящий момент. Двигатели переменного тока работали с фиксированной скоростью и поэтому не могли использоваться в этом приложении. Двигатели постоянного тока имеют несколько недостатков, о которых будет сказано ниже.
Разработка частотно-регулируемых приводов для больших синхронных двигателей переменного тока изменила ситуацию, и сегодня большинство локомотивов используют этот тип двигателя и комбинации привода.На рынке появились двигатели с большими постоянными магнитами (PM), которые имеют ряд преимуществ перед синхронными двигателями переменного тока с обмоткой статора для тяговых приложений. Ряд производителей используют в своих локомотивах двигатели с постоянными магнитами.
Ряд производителей используют в своих локомотивах двигатели с постоянными магнитами.
Двигатели тяговые постоянного тока
Двигатели постоянного тока используются в конфигурации с последовательной обмоткой, а скорость регулируется путем переключения последовательного сопротивления в цепи и вне ее. В ранних приложениях сопротивление регулировалось драйвером вручную, но позже были установлены релейные системы, которые делали это автоматически.При запуске через двигатель протекает максимальный ток, обеспечивая максимальный крутящий момент. По мере увеличения скорости двигателя противо-ЭДС снижает ток и крутящий момент, а последовательное сопротивление постепенно отключается, чтобы поддерживать требуемый крутящий момент, пока не будет достигнута полная скорость. Переключение сопротивления дает ступенчатое изменение крутящего момента и, следовательно, ускорения. Релейные системы были заменены электронным управлением в более поздних системах, чтобы обеспечить более плавные характеристики ускорения и замедления. В используемых сегодня системах обычно используются двигатели постоянного тока с раздельным возбуждением и тиристорные регуляторы как для возбуждения поля, так и для основного напряжения питания.Двигатели постоянного тока по-прежнему используются в приложениях, требующих постоянного запуска-останова при большой нагрузке.
В используемых сегодня системах обычно используются двигатели постоянного тока с раздельным возбуждением и тиристорные регуляторы как для возбуждения поля, так и для основного напряжения питания.Двигатели постоянного тока по-прежнему используются в приложениях, требующих постоянного запуска-останова при большой нагрузке.
Рис. 1: Мотор на оси (Railelectrica [5]). Двигатели постоянного тока серии
имеют недостаток, заключающийся в том, что при проскальзывании колес в стандартном приводе постоянного тока тяговый двигатель имеет тенденцию ускоряться и убегать, даже до точки механического отказа, если мощность не снижается. быстро. По мере увеличения проскальзывания колес коэффициент трения ( µ ) также быстро падает до уровня 0,10 или меньше, и, поскольку все двигатели соединены вместе, нагрузка на весь локомотив должна быть уменьшена.Таким образом, максимальная адгезия достигается при работе на уровне с комфортным запасом прочности ниже теоретического максимума. Более современные системы постоянного тока включают контроль проскальзывания колес, который определяет начало скольжения и автоматически модулирует мощность для сохранения контроля. Это позволяет локомотиву безопасно работать в точке, близкой к теоретическому максимуму [4].
Это позволяет локомотиву безопасно работать в точке, близкой к теоретическому максимуму [4].Двигатели с частотно-регулируемым приводом переменного тока: асинхронные двигатели
Замена двигателей постоянного тока двигателями переменного тока стала возможной благодаря развитию мощных электронных устройств, используемых в частотно-регулируемых приводах (ЧРП).ЧРП позволяют управлять скоростью и крутящим моментом в большей степени, чем двигатели постоянного тока, и позволяют реализовать больше функций управления. Тяговые двигатели переменного тока заменили двигатели постоянного тока во многих тяговых приложениях. Используемые двигатели являются асинхронными или асинхронными двигателями, которые имеют характеристики, подходящие для тяги. Скорость и крутящий момент двигателя регулируются путем изменения частоты, напряжения и тока, подаваемых на катушки статора. Двигатели для типичного локомотива будут иметь мощность от 400 до 600 кВт.
Синхронный двигатель с постоянными магнитами (PMSM)
PMSM — это трехфазный синхронный двигатель переменного тока с обычным короткозамкнутым ротором или индукционной конструкцией, замененной магнитами, закрепленными в роторе. Ротор приводится в движение вращающимся магнитным полем, реализуемым посредством трехфазного переменного тока, подаваемого на обмотку статора. Ротор будет вращаться синхронно с вращающимся полем, создаваемым статором. Для двигателя требуется сложная система управления, но он может быть на 25% меньше, чем обычный трехфазный двигатель при той же номинальной мощности.Конструкция также обеспечивает более низкие рабочие температуры, поэтому охлаждение ротора не требуется, а статор представляет собой герметичный блок со встроенным жидкостным охлаждением. Ряд различных типов поездов был оборудован двигателями с постоянными магнитами. Уменьшенный размер особенно привлекателен для автомобилей с низким полом, где ступичные двигатели могут быть эффективным способом обеспечения тяги в компактной тележке. Разработка двигателя и связанных с ним систем управления продолжается, и несомненно, что двигатель с постоянными магнитами будет использоваться на большем количестве железных дорог в будущем [3].Системы управления способны управлять как крутящим моментом, так и скоростью двигателя, что обеспечивает широкий диапазон работы, подходящий для тяги.
Ротор приводится в движение вращающимся магнитным полем, реализуемым посредством трехфазного переменного тока, подаваемого на обмотку статора. Ротор будет вращаться синхронно с вращающимся полем, создаваемым статором. Для двигателя требуется сложная система управления, но он может быть на 25% меньше, чем обычный трехфазный двигатель при той же номинальной мощности.Конструкция также обеспечивает более низкие рабочие температуры, поэтому охлаждение ротора не требуется, а статор представляет собой герметичный блок со встроенным жидкостным охлаждением. Ряд различных типов поездов был оборудован двигателями с постоянными магнитами. Уменьшенный размер особенно привлекателен для автомобилей с низким полом, где ступичные двигатели могут быть эффективным способом обеспечения тяги в компактной тележке. Разработка двигателя и связанных с ним систем управления продолжается, и несомненно, что двигатель с постоянными магнитами будет использоваться на большем количестве железных дорог в будущем [3].Системы управления способны управлять как крутящим моментом, так и скоростью двигателя, что обеспечивает широкий диапазон работы, подходящий для тяги.
Двигатель с постоянными магнитами обеспечивает более высокий пусковой момент, чем асинхронные или асинхронные двигатели переменного тока, используемые в локомотивах, что дает возможность управлять осью напрямую, в отличие от зубчатой передачи, используемой с другими двигателями. Это снижает вес и увеличивает эффективность. PMSM использует специально разработанный инвертор / контроллер, чтобы воспользоваться преимуществами характеристик двигателя.
Установка тягового двигателя непосредственно на колесо была целью с тех пор, как электродвигатели впервые использовались в локомотивах. Вероятно, в будущем это станет возможным благодаря модулям PMSM с высоким удельным крутящим моментом. Опытные образцы созданы успешно. Конструкции с осевым потоком были созданы для промышленности, и, возможно, эту конфигурацию можно будет использовать на локомотивах.
Генераторы
Генераторы переменного тока используются в локомотивах с приводом от постоянного и переменного тока для выработки необходимой электроэнергии.Типичный генератор переменного тока будет бесщеточным трехфазным синхронным типом. Генератор приводится в действие непосредственно дизельным двигателем и, таким образом, работает в диапазоне скоростей и, как следствие, изменяющейся выходной частоты. Возможно, это основная причина использования комбинаций выпрямитель / инвертор. Нет причин, по которым генератор переменного тока должен работать на фиксированной частоте, поскольку он не управляет напрямую устройствами, зависящими от частоты. Рабочий частотный диапазон также может быть выбран в соответствии с процессом выпрямления, при этом типичная выходная мощность составляет 3 фазы 75 Гц при работе на полных оборотах двигателя.Во многих генераторах переменного тока выпрямительный узел прикреплен к раме генератора и поставляется в виде блока, согласованного с выходом генератора. Это позволяет использовать генератор переменного тока и для тяги постоянного тока.
Выпрямительные преобразователи
Для всех типов тяговых двигателей требуется питание постоянного тока, либо непосредственно в случае двигателя постоянного тока, либо косвенно через частотно-регулируемый привод в случае двигателя переменного тока. Во многих современных двигателях выпрямительный блок поставляется как часть генератора переменного тока и соответствует характеристикам машины.
Органы управления локомотивом
Ранние средства управления основывались только на скорости. Современные разработки учитывают множество других факторов, чтобы максимизировать тяговую мощность локомотивов при том же размере приводного двигателя. Одним из основных факторов, влияющих на тяговую мощность, является проскальзывание или проскальзывание колес, и большинство современных систем управления предназначены для управления величиной проскальзывания между колесом и рельсом.
Адгезия и скольжение в локомотивах
Локомотив приводится в движение за счет контакта колеса с рельсом.Это контакт металл-металл, и передаваемая сила зависит от коэффициента сцепления и веса сцепления локомотива. Коэффициент сцепления означает величину веса локомотива на его ведущих колесах, которая может быть преобразована в тяговое усилие.
Пробуксовка колес происходит, когда тяговое усилие превышает адгезионную массу. Адгезионный вес определяется как сила, которую может приложить колесо без проскальзывания или скольжения. Скольжение возникает, когда окружная скорость превышает линейную скорость колеса на рельсе.
Вес клея т = мкм адгезия x вес (1)
Коэффициент сцепления зависит от скорости скольжения, состояния поверхности рельса, скорости поезда и температуры в зоне контакта. Из всех параметров, которые могут влиять на коэффициент сцепления, можно изменять и контролировать только скорость поезда и скорость скольжения. Поскольку скорость поезда обычно поддерживается на требуемом уровне, можно управлять только скоростью скольжения [1].Характеристики колес немного различаются, и соединенные ведущие колеса будут иметь некоторое пробуксовку.
Рис. 2: Коэффициент адгезии зависит от скорости скольжения [1].
Даже при работе в оптимальных условиях между колесами и рельсами будет определенный процент пробуксовки. Целью современной системы управления является максимальное увеличение коэффициента сцепления за счет ограничения или контроля степени проскальзывания колес. Это достигается за счет управления двигателями многоосного грузовика или агрегата.Тяговое усилие изменяется в зависимости от скольжения, как показано на рис. 2, и цель системы управления — управлять локомотивом в зоне максимального коэффициента сцепления. Существует разница в коэффициентах сцепления, достигаемая с двигателями переменного и постоянного тока. Приводы переменного тока обеспечивают более высокие пусковые коэффициенты сцепления, а также более высокую управляемую адгезию.Существует ряд различных систем, используемых для управления скольжением и оптимизации коэффициента сцепления. Все используют какие-то средства сравнения скорости вращения колеса с линейной скоростью поезда и подают соответствующие средства управления на инвертор.Проскальзывание измеряется путем определения скорости локомотива с помощью доплеровского радара (вместо использования вращающихся колес) и сравнения ее с током двигателя, чтобы увидеть, соответствует ли вращение колеса скорости движения относительно земли. Если между ними существует несоответствие, ток двигателя регулируется, чтобы поддерживать скольжение в пределах диапазона «медленного» хода и поддерживать тяговое усилие на максимально возможном уровне в условиях медленного движения [3].
Еще один элемент управления, обеспечивающий улучшенное сцепление, — это компенсация переноса веса.Когда локомотив тянет груз, вес имеет тенденцию переноситься с передней оси на заднюю ось каждого грузовика. При максимальном тяговом усилии вес ведущей оси может быть уменьшен примерно на 20%. Поскольку тяговое усилие пропорционально весу водителей, тяговое усилие будет определяться самой легкой осью в системе, в которой двигатели получают питание от общего источника. Таким образом, эквивалентная масса локомотива снижается примерно на 20%. Однако с системой управления осью привод может компенсировать перенос веса.Когда ведущая ось гаснет, система привода снижает мощность на эту ось и передает больше мощности на заднюю ось, не вызывая пробуксовки колес.
Инверторы и системы управления
Инвертор, который на самом деле является моторным приводом или частотно-регулируемым приводом, подает на двигатели переменный ток различной частоты и тока. Первоначально один инвертор поставлял все двигатели, но в соответствии с новейшими технологиями, как правило, используется один инвертор на двигатель. Это дает преимущество уменьшения размера инвертора и возможности индивидуального управления двигателем.В большинстве больших локомотивов используется конфигурация с одним двигателем на ось, поэтому каждый преобразователь управляет осью и колесной парой.
Есть несколько вариантов конфигурации инверторов. Некоторые производители полагаются на один инвертор на грузовик, в то время как другие используют один инвертор на ось. Обе системы имеют свои достоинства. Система управления грузовиком соединяет оси в каждом грузовике параллельно, обеспечивая максимальное равное управление проскальзыванием колес между осями. Параллельное управление также означает более равномерный износ колес между осями.Однако, если один инвертор (например, один грузовик) выходит из строя, то агрегат может создавать только 50% своего тягового усилия. Один инвертор на ось сложнее, но есть мнение, что индивидуальное управление осью может обеспечить наилучшее тяговое усилие. Если инвертор выходит из строя, тяговое усилие для этой оси теряется, но полное тяговое усилие по-прежнему доступно через другие пять инверторов (для шестиосного агрегата). За счет индивидуального управления каждой осью отпадает необходимость в точном согласовании диаметров колес для оптимальной производительности [4].
Динамическое торможение
В системах динамического торможения двигатели работают как генераторы, а генерируемый ток подается на реостаты или переменные резисторы, установленные на шасси локомотива. Сила торможения регулируется изменением сопротивления реостата. Мощность, необходимая для торможения или замедления локомотива, такая же, как и для его ускорения, поэтому реостаты должны рассеивать большое количество энергии и, как правило, имеют принудительное воздушное охлаждение.В более поздних разработках генерируемый ток использовался для зарядки аккумуляторных батарей или ультраконденсаторов, а накопленная энергия использовалась для помощи в повторном ускорении локомотива.
Возможности модернизации
Локомотивы— это долгосрочная инвестиция, и в Африке есть много единиц, которым более 20 лет, с использованием более старых технологий и средств управления. К счастью, можно модернизировать системы управления на старых локомотивах для повышения производительности и продления срока службы локомотива без замены основных компонентов привода.Было заявлено улучшение тягового усилия до 25%, а сцепления при любых погодных условиях или при отправке — до 26%. Это может уменьшить количество единиц, необходимых для перевозки высоких грузов.
Накопители энергии или суперконденсаторы для ускорения запуска
Супер- и ультраконденсаторы используются в некоторых локомотивах для обеспечения дополнительной мощности, необходимой при запуске. Это позволяет использовать двигатели и генераторы меньшего размера. Конденсаторы могут накапливать энергию рекуперативного торможения, которая в противном случае рассеивалась бы в резисторах или других устройствах.
Самый южноафриканский локомотив
Локомотивы серии GE Evolution, производимые в Южной Африке, представляют собой шестиосные локомотивы (две группы по три спереди и сзади, все оси приводятся в движение), использующие технологию регулирования тягового усилия отдельных осей переменного тока, которая обеспечивает большую тяговую мощность за счет снижения проскальзывания на запуски, подъемы и в неоптимальных дорожных условиях. Эта технология обеспечивает оптимальную производительность, меньшие потери энергии и существенно снижает расходы на техническое обслуживание и связанные с ним простои в течение срока службы локомотива по сравнению с более старыми тяговыми системами постоянного и переменного тока.Локомотив оснащен сложными средствами управления оператора, которые улучшают диагностику и упрощают работу. Консолидированная архитектура управления локомотивом серии Evolution упрощает обновление программного обеспечения и загрузку данных. «Умные» дисплеи устраняют несколько дополнительных черных ящиков в пользу комбинации компьютера и дисплея, что повышает как надежность, так и эргономичность для оператора.
Список литературы
[1] P Pichlík и J Zděnek: «Обзор методов контроля пробуксовки, используемых в локомотивах», Труды по электротехнике , Vol.3 (2014), № 2, www.transoneleng.org/2014/20142c.pdf
[2] RTWP: «Электронное питание для поездов», www.railway-technical.com / tract-02.shtml
[3] RTWP: «Технология тепловозов», www.railway-technical.com / diesel.shtml
[4] Республиканский локомотив: «Тяга переменного тока против тяги постоянного тока», www.republiclocomotive.com/ac_traction_vs_dc_traction.html
[5] Railelectrica : «Выбор подвески тяговых двигателей», www.railelectrica.com/traction-motor/selection-of-suspension-arrangement-of-traction-motors-a-right-approach-2/
Присылайте свои комментарии по адресу: vector @ ee.co.za
Статьи по теме
AC Traction vs DC Traction — Гринвилл, Южная Каролина
AC TRACTION
Привод переменного тока, также известный как частотно-регулируемый привод, был стандартом в промышленности на протяжении многих лет.Хотя он использовался в локомотивах более двух десятилетий (особенно в Европе), только недавно цена приводов позволила использовать их в большинстве новых дизель-электрических локомотивов в Соединенных Штатах. Привод переменного тока работает, преобразуя выход тягового генератора переменного тока в постоянный ток (постоянный ток) и повторно преобразовывая его в переменный ток переменной частоты, который питает тяговые двигатели переменного тока. Поскольку двигатели переменного тока работают примерно с частотой тока, приводы должны регулировать частоту так, чтобы двигатели могли иметь диапазон скорости от нуля до максимальных оборотов в минуту.
Тяга переменного тока для локомотивов — значительное улучшение по сравнению со старыми системами постоянного тока. Основными преимуществами тяги переменного тока являются уровни сцепления до 100% выше, чем у постоянного тока, а также гораздо более высокая надежность и меньшие требования к техническому обслуживанию тяговых двигателей переменного тока.
Тяговое усилие локомотива (переменного или постоянного тока) определяется уравнениями:
Тяговое усилие = Вес на водителе x сцепление
Адгезия = Коэффициент трения x Переменная сцепления локомотива
Коэффициент трения между колесом и рельсом обычно находится в диапазоне.От 40 до 0,45 для относительно чистого, сухого рельса в приемлемом состоянии и практически одинаков для всех локомотивов. Переменная сцепления локомотива представляет способность локомотива преобразовывать имеющееся трение в полезное трение на стыке колес с рельсами. Оно значительно варьируется от примерно 0,45 для старых блоков постоянного тока до примерно 0,90 для современных блоков переменного тока. Эта переменная включает множество факторов, включая электрическую конструкцию, системы управления, тип грузовика и состояние колес.
Локомотивы постоянного тока первого поколения, такие как SW1200, GP9, SD40 и центральные кабины GE, обычно имеют уровень сцепления от 18% до 20%.Более современные устройства с контролем адгезии, такие как SD60s и Dash 8s, имеют уровень адгезии от 25% до 27%. Новые тяговые агрегаты переменного тока, такие как SD80MAC и C44AC, обычно имеют сцепление от 37% до 39%. Таким образом, новые локомотивы имеют примерно вдвое большую адгезию, чем старые агрегаты, а на железных дорогах Класса I, фактически, обычно заменяются два старых агрегата одним новым агрегатом переменного тока.
Есть три основные причины, по которым тяга переменного тока обеспечивает гораздо большую адгезию. Во-первых, в стандартном приводе постоянного тока, если происходит пробуксовка колеса, тяговый двигатель имеет тенденцию ускоряться и убегать, даже до точки механического отказа, если быстро не уменьшить нагрузку.По мере увеличения проскальзывания колес коэффициент трения также быстро падает до уровня 0,10 или менее, и, поскольку все двигатели соединены вместе, нагрузка на весь локомотив должна быть уменьшена. Таким образом, максимальная адгезия достигается при работе на уровне с комфортным запасом прочности ниже теоретического максимума. Более современные системы постоянного тока включают контроль проскальзывания колес, который определяет начало проскальзывания и автоматически модулирует мощность, чтобы сохранить контроль. Это позволяет локомотиву безопасно работать в точке, близкой к теоретическому максимуму.
Однако система переменного тока работает по-другому. Частотно-регулируемый привод создает вращающееся магнитное поле, которое вращается примерно на 1% быстрее, чем вращается двигатель. Поскольку скорость ротора не может превышать полевую скорость, любое проскальзывание колеса минимально (менее 1%) и быстро обнаруживается приводом, который мгновенно снижает нагрузку на ось.
Далее, локомотив постоянного тока обычно имеет несколько настроек дроссельной заслонки с установленным уровнем мощности для каждой из них. Хотя эта система проста и эффективна, она не обеспечивает постоянного крутящего момента двигателя, поскольку мощность является продуктом крутящего момента и скорости.Следовательно, тяговое усилие значительно меняется для каждой настройки дроссельной заслонки в зависимости от скорости, что делает невозможным получение максимального сцепления.
Локомотив переменного тока, однако, может управлять определенным уровнем крутящего момента двигателя, что позволяет тяговому усилию оставаться практически постоянным в более высоком диапазоне доступного сцепления. Этот быстродействующий регулятор проскальзывания колес может противодействовать любому проскальзыванию колеса, так что уровень крутящего момента может быть установлен близким к верхним пределам.
Третий способ, которым тяга переменного тока обеспечивает улучшенное сцепление, — это компенсация переноса веса.Когда локомотив тянет груз, вес имеет тенденцию переноситься с передней оси на заднюю ось каждого грузовика. При максимальном тяговом усилии вес ведущей оси может быть уменьшен примерно на 20%. Поскольку тяговое усилие пропорционально весу водителей, то в системе постоянного тока, где двигатели питаются от общего источника, тяговое усилие будет определяться самой легкой осью. Таким образом, эквивалентная масса локомотива снижается примерно на 20%. Однако с системой переменного тока привод может компенсировать перенос веса.Когда ведущая ось гаснет, система привода переменного тока снижает мощность на эту ось и передает больше мощности на заднюю ось, не вызывая пробуксовки колес.
Комбинация устранения пробуксовки колес и компенсации переноса веса дает системе тяги переменного тока сцепление от 37% до 39% по сравнению с 18% до 20% у старых систем постоянного тока. Следовательно, локомотив с тягой переменного тока может обеспечивать такое же тяговое усилие, что и локомотив постоянного тока, который весит вдвое больше, или может давать вдвое больше тягового усилия при том же весе.
GE и EMD добавили тягу переменного тока к своим основным агрегатам и затем смогли заменить два старых агрегата постоянного тока одним новым локомотивом переменного тока. Республиканский локомотив пошел по другому пути и решил сделать более легкий и дешевый агрегат для промышленной коммутации. SW9 / SW1200 с питанием от постоянного тока, производившийся в больших количествах с 1951 по 1965 год и использовавшийся для переключения тяжелых станций, а также для обслуживания ответвлений, был принят в качестве стандарта производительности. При весе от 230 000 до 240 000 фунтов эти агрегаты обычно рассчитаны на постоянное тяговое усилие около 40 000 фунтов (несколько более высокое, прерывистое, но ограниченное тяговыми двигателями и генераторами).Тяговое усилие RX500 на переменном токе составляет 144 000 фунтов и консервативный уровень сцепления 35%, а постоянное тяговое усилие составляет 50 400 фунтов.
При тяге переменного тока также важно учитывать торможение. Как и в случае с тягой, торможение зависит от веса водителя. Следовательно, при использовании стандартного фрикционного торможения (протекторные тормоза) тормозная способность локомотива (исключая торможение поезда) пропорциональна весу локомотива. Однако с тягой переменного тока торможение может быть намного выше, потому что система привода при торможении действует так же, как привод при тяговом усилии, тем самым устраняя пробуксовку колес.Привод переводит двигатели в генераторный режим (динамическое торможение), и произведенная электроэнергия рассеивается на тормозных резисторах. Таким образом, двигатели замедляют локомотив без использования пневматических тормозов. Опять же, уровни сцепления намного выше, поэтому локомотив снова может быть значительно легче при том же количестве торможений. Динамическое торможение в тяговых локомотивах переменного тока также позволяет полностью тормозить до нулевой скорости, в отличие от динамического торможения постоянным током.
В целом тяговый локомотив переменного тока обеспечивает примерно в два раза большую адгезию, чем локомотив постоянного тока.Следовательно, современный легкий локомотив переменного тока, такой как RX500, может обеспечить такое же или большее тяговое усилие, чем старый локомотив постоянного тока, такой как SW1200, который весит на 60% больше.
Тяговые двигатели — обзор
6.2.1.2 Повышение коэрцитивной силы посредством процесса диффузии границы зерна
Рабочая температура тяговых двигателей для гибридных / электрических транспортных средств обычно составляет 150–200 ° C, и они требуют не менее 6 кЭ (0,6 Тл) H c . Однако из-за низкого T C Nd 2 Fe 14 B (315 ° C) спеченные магниты на основе Nd-Fe-B не могут использоваться, поскольку их H c быстро падают. с температурой.PM, пригодный для высокотемпературных применений, должен иметь высокий H c около 30 кЭ (3 Тл) при комнатной температуре. Чтобы компенсировать потерю H c , примерно одна треть атомов Nd замещена тяжелыми RE-элементами Dy или Tb в спеченных магнитах Nd-Fe-B с высокой коэрцитивной силой, чтобы использовать более высокие H a фазы (Nd, Dy / Tb) 2 Fe 14 B фазы. Однако замещение Dy / Tb значительно снижает намагниченность из-за антиферромагнитной связи между Dy / Tb и Fe, что приводит к уменьшению ( BH ) max .Кроме того, Dy — ограниченный природный ресурс и очень дорогой. Эти факторы создали потребность в магнитах H, , и без тяжелых РЗМ. Модификация микроструктуры магнитов Nd-Fe-B играет решающую роль в улучшении этих магнитов H c и M r [49]. В зависимости от размера зерна и содержания РЗЭ промышленные спеченные магниты без Dy демонстрируют H c ≈ 12–19 кЭ (960–1520 кА / м) при комнатной температуре.Park et al. [50] предложили процесс диффузии по границам зерен тяжелых RE-металлов (GBDP) для улучшения H c спеченных магнитов путем проникновения соединений тяжелых RE-металлов, таких как Dy 2 O 3 , DyF 3 , Tb 3 O 4 и TbF 4 . Процесс GBDP включает покрытие поверхности магнитов слоем тяжелых соединений RE, например, путем влажного покрытия или испарения металла или смешивания с порошками перед уплотнением.Затем магниты нагреваются до температуры (~ 1000 ° C), при которой границы зерен, богатых неодимом, плавятся, облегчая тем самым диффузию тяжелых РЗЭ элементов в границы зерен. Во время этого процесса некоторые из тяжелых РЗЭ далее диффундируют во внешнюю оболочку зерен Nd 2 Fe 14 B, образуя эпитаксиальную оболочку, обогащенную Dy / Tb, где инициируются зарождение и распространение перемагничивания. Тяжелые RE-элементы во внешней оболочке обеспечивают увеличенные H, , и , что приводит к увеличению H c в магнитах.В результате требуется значительно уменьшенное количество Dy, что, в свою очередь, позволяет изготавливать магниты с высокой H c с минимальными потерями M s .
Эффекты GBDP зависят от нескольких факторов, включая распределение фазы, богатой RE в исходном магните, источник диффузии, массовое соотношение между диффундирующим соединением и магнитом, текстуру, термообработку, температуру и время и т. Д. увеличивает H c и уменьшает количество требуемых RE элементов по сравнению со смешиванием RE элементов с исходным магнитным сплавом.Накамура и др. [51] пропитали Dy и Tb в спеченных магнитах Nd-Fe-B путем покрытия мелкозернистыми порошками Dy 2 O 3 , DyF 3 или TbF 3 (1–5 мкм) посредством погружение в смеси порошка и этанола и термообработка при температуре до 900 ° C с последующим старением при температуре около 500 ° C. Они наблюдали значительное улучшение H c для Dy 2 O 3 , DyF 3 и TbF 3 с 11,3 кЭ (900 кА / м) до 16.3 кЭ (1300 кА / м), 18,8 кЭ (1500 кА / м) и 22,6 кЭ (1800 кА / м), соответственно, без заметного снижения M r . Более высокое усиление H c в магнитах с Tb, чем Dy, приписывается более высокому H a (Nd, Tb) 2 Fe 14 B по сравнению с (Nd, Dy) 2 Fe 14 B. Ishimaru et al. [52] диффузия обработала импульсную лазерную осажденную толстую пленку Nd-Fe-B с Tb-металлом и сообщила о заметном увеличении H c с 13.От 3 кЭ (1050 кА / м) до более 27,5 кЭ (2200 кА / м) без каких-либо значительных потерь в M r. Samardžija et al. [53] исследовали анизотропные спеченные магниты Nd 2 Fe 14 B, модифицированные Tb с использованием GBDP путем покрытия магнита суспензией Tb 4 O 7 -этанола с последующей термообработкой при 850 ° C в течение 10 часов и позже при 500 ° C в течение 1 ч. Они также показали с помощью микроскопических исследований, что сначала Tb диффундирует по границам зерен от поверхности к центру магнита, а затем вступает в реакцию с внешними частями зерен матрицы Nd 2 Fe 14 B, образуя богатую Tb и (Nd, Tb) 2 Fe 14 B структура ядро-оболочка.Магниты GBDP показали увеличение H c на 30% с 13,1 кЭ (1150 кА / м) до 18,2 кЭ (1450 кА / м), при практически неизменном M r . Ли и др. [54] также сообщили об аналогичных наблюдениях GBDP с Tb с использованием Tb 2 S 3 в спеченных магнитах Nd-Fe-B. Sepehri-Amin et al. [55] проникал Dy в Nd 10,9 Pr 3,1 Fe 77,4 Co 2,4 B 6,0 Ga 0,1 Cu 0.1 (ат.%) Промышленный спеченный магнит ГБДП выдержкой в парах Dy при 800–1000 ° C с последующей термообработкой при 500–600 ° C в течение 1–3 ч. Они пришли к выводу, что наличие оболочки (Nd, Dy) 2 Fe 14 B с улучшенным H a в сочетании со слоем GB-фазы, обогащенным RE, является существенными микроструктурными особенностями спеченных магнитов GBDP. ; первый увеличивает поле зародышеобразования от границ зерен, а второй улучшает развязку.Ma et al. [56] пропитали анизотропные спеченные магниты Dy-H и показали, что на GBDP влияет анизотропия — она более эффективна в направлении оси c, чем в перпендикулярном направлении.
Однако вышеупомянутый высокотемпературный метод GBDP не может быть использован для горячедеформированных магнитов с ультрамелкозернистыми размерами (~ 250 нм в длину и ~ 100 нм в ширину), поскольку высокотемпературный отжиг приводит к чрезмерному росту зерна. Sepehri-Amin et al. [57] представили модифицированный GBDP с использованием легкоплавких эвтектических сплавов RE-M с низкой температурой плавления (RE: Nd, Pr, Nd-Dy; M: Cu, Al и т. Д.).) в качестве источников диффузии, проникающих в границы зерен при низкой температуре 600–650 ° C для улучшения магнитной развязки между зернами Nd 2 Fe 14 B. Образование неферромагнитных богатых РЗЭ межзеренных фаз в пропитанных магнитах приводит к значительному увеличению H c , а также вызывает большое снижение M r . Akiya et al. [58] объяснил уменьшение M r деградацией [001] текстуры зерен Nd 2 Fe 14 B и предложил способ решения проблемы путем выполнения инфильтрации в условиях ограничения расширения.Sepehri-Amin et al. [57] выполнили низкотемпературную обработку ГБДП в порошках гидрирования, диспропорционирования, десорбции и рекомбинации (HDDR) Nd 12,5 Fe 72,8 Co 8,0 B 6,5 Сплав Ga 0,2 с Nd 80 Cu 20 и сообщил об увеличении H c с 16,5 кЭ (1321 кА / м) до 19,4 кЭ (1552 кА / м). Эта же группа выполнила ГБДП на горячедеформированном магните Nd-Fe-B с Nd 60 Dy 20 Cu 20 [59] . Увеличение с 16 кЭ (1280 кА / м) до 26 кЭ (2080 кА / м) наблюдалось в магните, пропитанном Nd 60 Dy 20 Cu 20 . Увеличение H c было объяснено совместным эффектом уменьшения ферромагнитных элементов в межзеренной фазе и образования оболочки (Nd, Dy) 2 Fe 14 B. Seelam et al. [60] использовали сплавы Nd 60 Al 10 Ni 10 Cu 20 и Pr 60 Al 10 Ni 10 Cu 20 с объемной стеклообразующей способностью и низкими температурами плавления для GBDP для увеличения коэрцитивной силы горячедеформированных магнитов и сообщил о 28 кЭ (2240 кА / м) H c .Несколько комбинаций сплавов использовались в качестве источника диффузии для GBDP для повышения H c в магнитах, полученных спеканием, SPS, горячей деформацией, включая Nd-Cu [58,61–64], Pr-Cu [63 , 65], Pr- (Cu, Al) [66], Dy-Cu [61,67,68], Pr- (Cu, Co) [12], (Nd, Pr) -Cu [69], Nd- (Ga, Cu) [70], La-Cu [63], (Nd, Dy) -Cu [67], (Nd, Tb) -Cu [67], Nd-Al [61], (Nd, Dy) -Al [61,71], Dy- (Ni, Al) [61] и (Pr, Nd, Ce) -Cu [72].
Как работают тепловозы | HowStuffWorks
Вы не просто запрыгиваете в кабину, поворачиваете ключ и уезжаете на тепловозе.Завести поезд немного сложнее, чем завести машину.
Инженер поднимается по лестнице высотой 8 футов (2,4 м) и входит в коридор за кабиной. Он или она задействует рубильник (как в старых фильмах о Франкенштейне), который подключает батареи к цепи стартера. Затем инженер включает около сотни переключателей на панели выключателя, обеспечивая питание всего, от лампочек до топливного насоса.
Затем инженер идет по коридору в машинное отделение.Он поворачивается и удерживает там переключатель, который запускает топливную систему, убеждаясь, что весь воздух выходит из системы. Затем он поворачивает переключатель в другую сторону, и стартер включается. Двигатель проворачивается и начинает работать.
Затем он идет в кабину, чтобы следить за датчиками и включать тормоза, как только компрессор создает давление в тормозной системе. Затем он может отправиться в конец поезда, чтобы отпустить ручной тормоз.
Наконец, он может вернуться в кабину и взять на себя управление оттуда.Получив разрешение от кондуктора поезда на движение, он включает колокол , который звонит непрерывно, и дважды подает звуковой сигнал воздушным рожком (указывая на движение вперед).
Рычаг управления дроссельной заслонкой имеет восемь положений плюс положение холостого хода. Каждое положение дроссельной заслонки называется «отметка , ». Notch 1 — самая низкая скорость, а notch 8 — самая высокая скорость. Чтобы поезд двинулся с места, машинист отпускает тормоза и переводит дроссель в положение 1.
В этом двигателе General Motors серии EMD 710 установка дроссельной заслонки в паз 1 включает набор из контакторов (гигантские электрические реле). Эти контакторы подключают главный генератор к тяговым двигателям. Каждая выемка включает различную комбинацию контакторов, производящих различное напряжение. Некоторые комбинации контакторов объединяют определенные части обмотки генератора в последовательную конфигурацию, что приводит к более высокому напряжению. Другие подключают определенные части параллельно, что приводит к более низкому напряжению.Тяговые двигатели вырабатывают больше мощности при более высоких напряжениях.
Когда контакторы входят в зацепление, компьютеризированное управление двигателем регулирует топливные форсунки для начала выработки большей мощности двигателя.
Блок управления тормозом изменяет давление воздуха в тормозных цилиндрах для оказания давления на тормозные колодки. В то же время он сочетается с динамическим торможением, используя двигатели для замедления поезда.
У инженера также есть множество других элементов управления и световых индикаторов.
Компьютеризированное считывающее устройство отображает данные с датчиков по всему локомотиву. Он может предоставить инженеру или механикам информацию, которая поможет диагностировать проблемы. Например, если давление в топливных магистралях становится слишком высоким, это может означать, что топливный фильтр забит.
А теперь заглянем внутрь поезда.
Дизельных поездов на самом деле управляют электродвигателями — Вы когда-нибудь слышали о тяговых двигателях в дизельных поездах?
А дизель тренироваться двигатель вращается а большой генератор / генератор который производит ПЕРЕМЕННЫЙ ТОК выход.Этот Текущий проходит через а выпрямитель. А выпрямитель обращает AC Вход к ОКРУГ КОЛУМБИЯ выход.
В окончательный выход Текущий является переданный к в тяга моторы. В тяга моторы потом предоставлять в действительный вращающийся сила или крутящий момент к в колеса. Технически говоря, а дизель тренироваться двигатель действует в виде а основной движитель.
Дизель паровоз двигатели в Индия имеют цилиндры ранжирование из 12 к 16. В единица измерения является соединенный к шесть тяга двигатели, один на каждый ось. Некоторые дизель поезда приехать с четыре тяга моторы.Следовательно, Это является безопасно к сказать тот Текущий дизель двигатели запустить на электрический мощность. Такой локомотивы являются названный в виде ‘Дизель Электрика ».
Ранее, дизель двигатели напрямую питание в колеса. Такой локомотивы мы называется ‘Дизель Гидравлика ». В двигатель выход был унесенный над к в колеса через а задавать из шестерни только как любой общепринятый дизель транспортное средство. Но это система был очень сильно сложный и неэффективно. Другой интересный факт о Дизель Электрика является, в срок ‘коробка передач’ подразумевает в форма из электрический Текущий переведен к в колеса и нет а коробка передач.
Дизель Тренироваться Преимущества Над Электрический Поезда
Дизель поезда являются Полегче к запустить и предложение ниже техническое обслуживание наоборот к популярный вера. Дизель тренироваться двигатели являются также очень гибкий в их использование в виде Они может хранить на Бег в виде долго в виде дизель топливо является имеется в наличии.
Дизель двигатели мог быть дороже чем электрический поезда в в долго бегать. Но в высокая исходный Стоимость из трасса-электрификация и параметр вверх подстанции для электрический железная дорога линии делать дизель двигатели еще а экономически эффективным вариант.Затем Зачем заменять дизель поезда с электрический локомотивы? В отвечать является загрязнение. В толстый курить приходящий вне из дизель тренироваться двигатели не особенно хороший для Мама Природа.
Мысли На Дизель Двигатели С использованием Электрический Мощность
Дизель поезда имеют всегда был а ностальгия фактор для многие. В громко чук-чук двигатель вдоль в толстый чернить дым был а общий наблюдение через Индия. Но в факт тот дизель поезда являются фактически запустить по электрический моторы является что-то самый из нас еще не могу полагать.Тот сказал, сделал ты знать тот Дизель Поезда Являются Никогда Повернулся Выключенный?
Почему в поездах используются двигатели постоянного тока?
Двигатели постоянного тока используются в самых разных отраслях промышленности, от работы до отдыха. Однако одна из основных отраслей, которые они обслуживают, — это железнодорожный транспорт. Двигатели постоянного тока обычно используются для силовых агрегатов и их отдельных частей, таких как дворники. Если вы подумываете о надежном и качественном двигателе для поезда, наша команда в Parvalux может порекомендовать двигатели постоянного тока, которые будут хорошо работать долгие годы.
Почему в поездах используются двигатели постоянного тока?
Двигатели постоянного тока используются в поездах из-за их высокого крутящего момента и хорошего управления скоростью. По сравнению с двигателями переменного тока, двигатели постоянного тока могут обеспечить промышленное применение с прекрасным балансом высокого пускового момента и регулируемой скорости для безупречной, но точной работы. Поезда — это масштабное приложение; следовательно, двигатель постоянного тока может эффективно и безопасно перемещать тяжелый груз вперед.
Двигатели постоянного токатакже являются фантастическим выбором для дворников ветрового стекла поездов — требовательного приложения, которое должно работать в различных условиях.Хороший мотор стеклоочистителя должен хорошо работать на любой скорости, в зависимости от погоды. Это означает, что точное управление скоростью жизненно важно, позволяя им плавно и легко адаптироваться к различным условиям.
Каковы преимущества двигателей постоянного тока?
Двигатели постоянного тока обладают множеством преимуществ, что делает их подходящим решением для использования в поездах по всему миру.
Вот некоторые из их основных преимуществ:
Фантастическое управление скоростью: двигатели постоянного тока известны своим отличным контролем скорости, обеспечивающим высокую точность и безопасность, которые требуются поездам.Широкое изменение скорости может быть достигнуто путем изменения якоря или напряжения возбуждения.
Бесперебойная работа : двигатели постоянного тока могут работать в соответствии со многими приложениями, включая поезда, для обеспечения необходимой скорости и мощности. Будучи жизненно важным транспортным средством, поезда должны иметь возможность эффективно запускаться и останавливаться как для экономии времени, так и в случае опасности.
Высокий крутящий момент : Поскольку поезд считается большой нагрузкой, двигатели постоянного тока хорошо подходят для этого из-за их высокого крутящего момента.Это означает, что двигатель может обеспечивать постоянный уровень мощности в течение более длительных периодов времени, что идеально подходит для поездов, которые работают более 12 часов в день.
Почему стоит выбрать Parvalux для двигателя постоянного тока?
Parvalux предлагает широкий спектр двигателей постоянного тока, включая двигатели с постоянным магнитом и бесщеточные двигатели постоянного тока. Мы обладаем более чем 70-летним ценным опытом в производстве двигателей постоянного тока. Наша команда талантливых и знающих инженеров всегда готова предоставить вам рекомендации, основанные на потребностях вашего приложения.Несмотря на то, что мы предлагаем множество стандартных опций, мы также предлагаем полностью изготовленные на заказ двигатели постоянного тока, которые могут быть адаптированы к вашему продукту. Будь то несколько небольших изменений или полностью индивидуальное решение, мы можем предоставить двигатель постоянного тока, адаптированный для вас. Наши варианты настройки включают, помимо прочего, длину кабеля, окраску, выходные фланцы и многое другое.
Наш рекомендуемый продукт VIPER3 — это идеальное решение для электродвигателей ветрового стекла для транспортной отрасли. Компактное, но надежное решение, этот двигатель может выдерживать различные среды и хорошо работать даже в самых тяжелых условиях.Поезда подвергаются воздействию дождя, пыли и как высоких, так и низких температур, в зависимости от климата, в котором они находятся. Этот двигатель стеклоочистителя может справиться с этими условиями без снижения производительности.
Свяжитесь с нами, чтобы получить дополнительную информацию о двигателях постоянного тока Parvalux или узнать о подходящем решении для вашей области применения. Позвоните по телефону +44 (0) 1202 512575 или напишите по адресу [email protected].
Быстро отслеживаемые электрические тяговые двигатели нового поколения
ROM — это упрощенная сжатая версия эталонной модели, которая сокращает время, необходимое для оптимизации и моделирования сложной системы, сохраняя при этом необходимую точность.Изучая альтернативы конструкции в 10–100 раз быстрее, чем эталонная модель с аналогичной точностью, ПЗУ позволило с высокой степенью достоверности прогнозировать тепловое поведение двигателя в рабочих циклах с большим количеством рабочих точек.
После того, как инженеры должным образом спроектировали, изготовили и развернули физический прототип электродвигателя, они протестировали его с помощью ПЗУ. Они запустили имитационную модель двигателя параллельно и в реальном времени по отношению к прототипу, когда он бежал по трассе.Это было бы невозможно с традиционным решателем, работа которого занимает как минимум часы. Вместо этого ПЗУ запускало моделирование за миллисекунды, чтобы инженеры могли прогнозировать любые отказы двигателя и улучшать работу в режиме реального времени.
Динамическое ПЗУ было в первую очередь создано для моделирования переходных процессов, потому что инженерам нужно было фиксировать тепловую реакцию электродвигателя для прогнозирования теплового поведения электродвигателя в течение полного рабочего цикла с большим количеством рабочих условий, которые меняются с течением времени.
Запуск динамического ПЗУ был ключевым моментом для инженеров в понимании поведения двигателя, поскольку он обеспечивает различные уровни рассеивания мощности в ответ на тепловую инерцию и различные переходные эффекты во время типичного рабочего цикла. Например, рассмотрим поезд метро, который начинает движение с первой остановки. Сначала идет фаза ускорения, затем фаза круиза, а затем фаза торможения для достижения следующей запланированной остановки. Во время этих фаз температура нескольких компонентов двигателя изменяется непрерывно и по-разному, и этот процесс повторяется от 10 до 20 остановок вдоль пути, когда метро пересекает город.Когда поезд паркуется, двигатель останавливается, и его изменяющаяся тепловая нагрузка должна охлаждаться.
В конечном счете, динамическое ПЗУ обеспечило понимание бесчисленных сценариев эксплуатации, с которыми может столкнуться поезд, от движения вверх и вниз по холмам до управления гладкостью мокрого пути.
После обширной оптимизации модели главные инженеры смогли запустить ПЗУ всего за миллисекунды, сэкономив огромное количество времени, не жертвуя скоростью на точность.Фактически, отклонение ПЗУ при оценке тепловых характеристик двигателя было менее 1 ° C от эталонной модели полного порядка.
.