torque%20pro / Поиск по тегам / OpenECU
info
Как адаптировать коробку DSG 7 0CW с помощью ODIS Service 1info
Porsche Piwis 38.200 38.400 39.500 39.700 39.800 Зачем нужны, отличия, какие рекомендуем 1info
Porsche Piwis 39.700 + VAS 6154 clone. Acronis image 1info
BMW Acronis 08.2020 образ с набором программ для автосервиса BMW ..»>
..»>info
Как обновить прошивку firmware update BMW ICOM / ICOM Next 1info
Mercedes Acronis образ 09.2020 Medium (для HDD / SSD 240 Gb) 1info
Mercedes Acronis image 09.2020 Full (для 480 Gb SSD). Новая сборка для автосервиса Мерседес 1info
Mercedes Xentry 09.2020 Acronis image Lite version (for 120 Gb HDD). For online coding 1 ..»>
..»>info
Обновить Mercedes WIS 2020. Исправить EPC «Отсутствуют права на чтение карты данных» 1info
Инструкция — Как удалить старую версию VAG ODIS Service, Engineering 1info
VAG Acronis образ в автосервис — Что в комплекте: ELSAWin ETKA ODIS-S ODIS-E DatFlash / FlashDateninfo
Как установить программу BMW ETK (каталог запчастей BMW, Mini, Rolls Royce) 1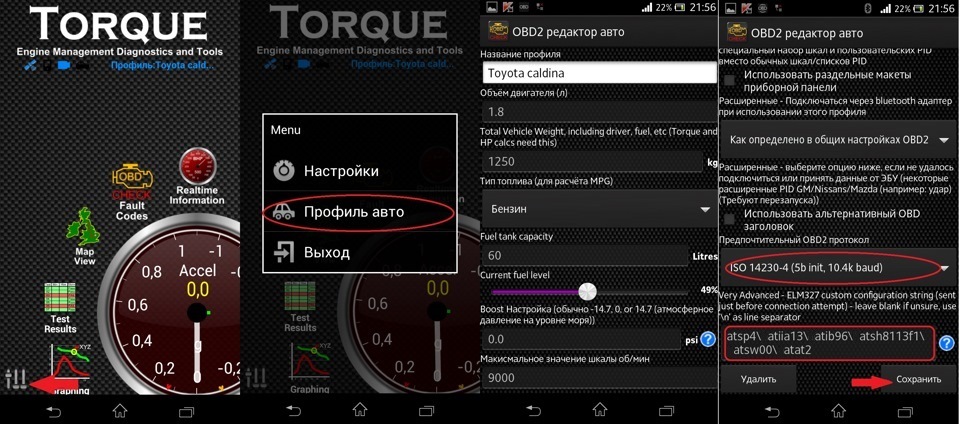 ..»>
..»>info
Активация — ключи для ODIS Service + ODIS Engineering. Какие проблемы бесплатной китайской активации 1info
Nissan Consult 3+ Как установить программу. Как настроить под j2534 Passthru 1info
Как установить программы — ODIS Service, Engineering 1info
Xentry OpenShell 06.2020 HHT DAS SCN WIS EPC Starfinder Vediamo Monaco — Acronis образ FREE 1 ..»>
..»>info
Что нужно для диагностики автомобилей VAG в автосервис ПРОГРАММЫ + ПРИБОРЫ 1info
Porsche Piwis 3 38.400, 38.200 + VAS6154 + DoIP — Что так можно?! 1info
Opel Insignia ПРОБЛЕМА С AFL системой — Как помог Autocom 1info
Porsche PIWIS 3 38.400 + Porsche Boxter 1Диагностика ошибок двигателя с использованием OBD2 адаптера ELM327
На приборной панели автомобиля горит ошибка двигателя? Рассмотрим порядок действий для определения причины возникшей неисправности.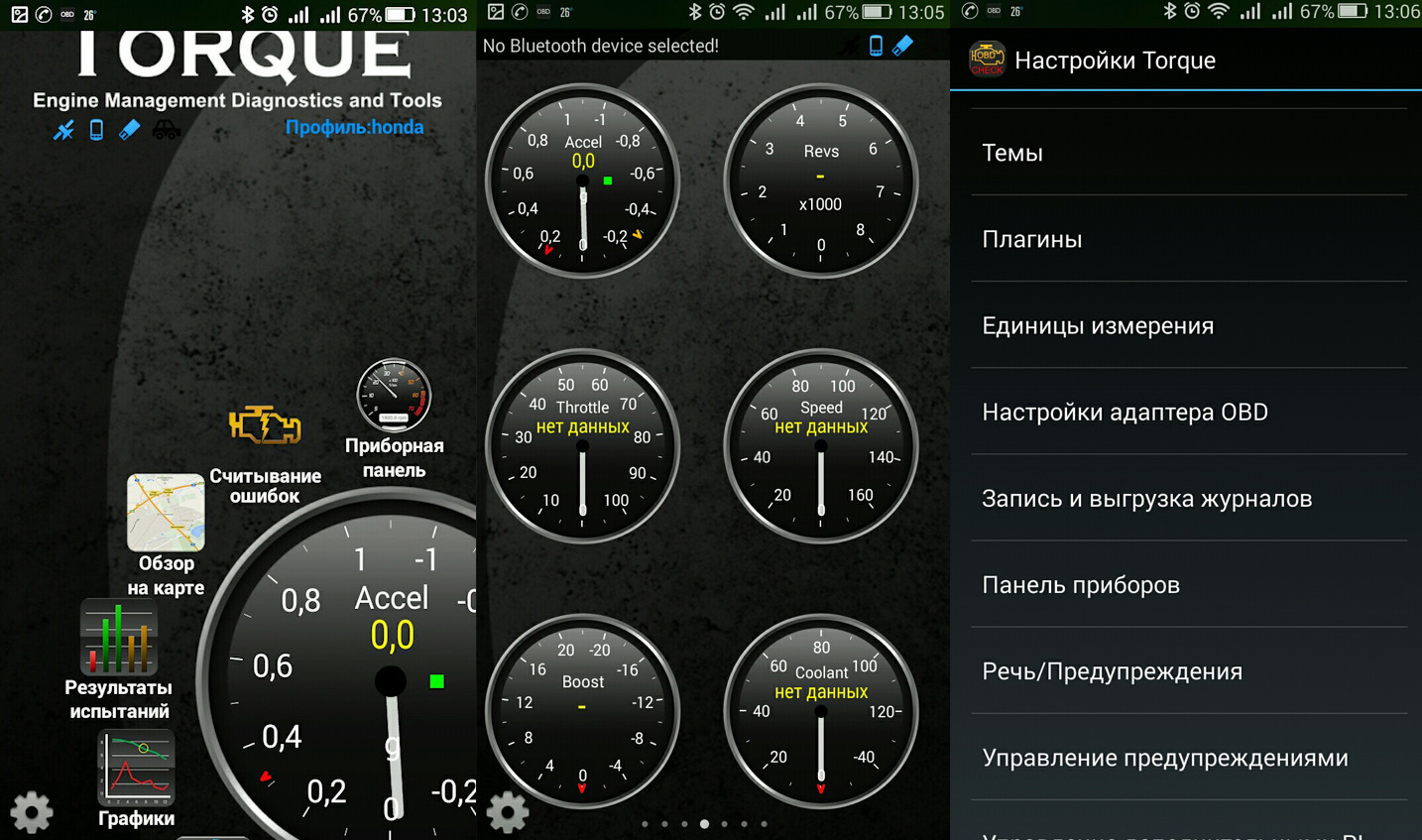
В качестве OBD-II адаптера возьмем один из самых дешёвых и популярных — автосканер ELM327.
Для диагностики двигателя и определения кода ошибки понадобятся:
- Ноутбук, планшет или смартфон с Android/iOS (подойдёт одно любое устройство из перечисленного).
- Адаптер ELM327 с подходящим к вашему устройству типом связи (автосканер выпускается в различных версиях — USB, Wi-Fi и Bluetooth). Уточняйте у продавца заранее, будет ли предлагаемый им адаптер совместим с вашим компьютером или смартфоном.
- Специальная программа для интерпретации полученных от автосканера данных (для определения кода ошибки подойдут бесплатные версии программ) — Torque Lite.
Общий порядок действий (на примере устройства с Android и адаптера ELM327 с Bluetooth связью):
- Подключаем адаптер ELM327 к специальному диагностическому разъёму OBD2 в вашем автомобиле.
- Включаем зажигание (можно запустить двигатель — автосканер будет работать даже в движении).

- Включаем Bluetooth в Android.
- В настройках Android заходим в беспроводные сети Bluetooth, далее выбираем поиск нового устройства для сопряжения. Идентификатор автосканера обычно OBDII, но может быть и другое имя. Стандартный пароль для сопряжения 1234 или 0000 (в случае неудачи попробуйте 9999, 1111, 5678, 6789).
- Открываем диагностическую программу на Android (например, Torque) и следуем инструкции ниже.

Настройка программы Torque для ELM327 и определение кода ошибки
Первым делом подружим программу с нашим диагностическим сканером.
- Нажимаем кнопку «Настройки».
- Выбираем пункт «Настройки адаптера OBD».
- Жмём «Тип подключения».
- Выбираем ваш тип подключения (в нашем случае Bluetooth) и сопряжённый адаптер.
Настройка программы в скриншотах
Осталось только проверить соединение: вернитесь на главный экран программы и нажмите «Adapter Status» (данный пункт меню может называться и по-другому, например «OBD2 Status» или «Состояние адаптера»).
Статус «Ok» должен быть напротив всех четырёх пунктов. Если всё в порядке, то приступайте к диагностике автомобиля.
Возникли проблемы при настройке? Задайте вопрос в комментариях указав модель автомобиля и год его производства, а также как можно больше информации об используемом адаптере и переносном устройстве.
Сканируем ЭБУ на ошибки
Возвращаемся на главный экран программы. Желательно настроить профиль диагностируемого автомобиля, однако вы уже можете провести диагностику.
- Жмём «CHECK Fault Codes» (может называться иначе, например «Считывание ошибок»).
- Получаем код ошибки (в нашем случае P0420, код ошибки всегда содержит только латинские буквы и цифры).
- Данный код можно ввести в форму поиска на нашем сайте. Получаем перевод ошибки на русский язык и советы по устранению неисправности.
Также программа позволяет сбросить ошибки (как это сделать показано на скриншоте).
Если программа показывает, что в ЭБУ нет сохранённых кодов ошибок, то всё в порядке, либо ошибки были сброшены.
Как подключить и настроить диагностический автомобильный сканер кодов OBD II CAN?
Как подключить и настроить диагностический автомобильный сканер кодов OBD II CAN?
КРАТКОЕ СОДЕРЖАНИЕ:
- Подключите устройство к телефону по Bluetooth
- Подключите устройство в настройках программы Torque
После покупки автомобильного диагностического сканера кодов OBD 2 нам очень часто задают вопрос – как его использовать? Действительно, разобраться с подключением бывает непросто, особенно, когда первый раз держишь устройство в руках. Именно поэтому мы написали данную статью – надеемся, она поможет Вам приступить к работе с устройством сразу после покупки и не терять драгоценное время.
Для начала давайте рассмотрим само устройство. Оно представляет собой небольшую коробочку, которая является, фактически, переходником для подключения Вашего смартфона к автомобилю через Bluetooth. Всей расшифровкой и обработкой информации занимается Ваш телефон – при помощи специальной установленной программы. Именно наличие практически у каждого человека небольшого смартфона сделало возможным производство бытовых автомобильных сканеров OBD II. Раньше для расшифровки использовались мощные компьютеры, которые устанавливались только в автосервисах. А теперь проверить состояние всех систем Вашего железного коня можно так же легко, как сделать покупку в обычном магазине! А самое главное – автомобильный сканер является «мультимарочным», то есть, подходит для абсолютно любого автомобиля!
Всей расшифровкой и обработкой информации занимается Ваш телефон – при помощи специальной установленной программы. Именно наличие практически у каждого человека небольшого смартфона сделало возможным производство бытовых автомобильных сканеров OBD II. Раньше для расшифровки использовались мощные компьютеры, которые устанавливались только в автосервисах. А теперь проверить состояние всех систем Вашего железного коня можно так же легко, как сделать покупку в обычном магазине! А самое главное – автомобильный сканер является «мультимарочным», то есть, подходит для абсолютно любого автомобиля!
Но вернемся к нашему устройству:
Рис. 1. Внешний вид автомобильного диагностического сканера OBD 2
В некоторых моделях сканеров в комплекте с устройством идет диск с программным обеспечением. Но на самом деле, для работы он совершенно не обязателен. Все, что нам нужно – это само устройство и смартфон.
Первое, что нам нужно – это найти диагностический разъем в автомобиле. Многие люди сразу лезут под капот, но в большинстве случаев разъем находится внутри салона, где-то под рулевой колонкой. Скажем честно – чтобы его обнаружить, придётся постараться. Советуем использовать фонарик. Зато после того, как он будет найден, Вы сможете устанавливать сканер не глядя.
Многие люди сразу лезут под капот, но в большинстве случаев разъем находится внутри салона, где-то под рулевой колонкой. Скажем честно – чтобы его обнаружить, придётся постараться. Советуем использовать фонарик. Зато после того, как он будет найден, Вы сможете устанавливать сканер не глядя.
Следующим шагом идет установка самого сканера. Желательно производить установку при заглушенном автомобиле. Разъем устроен таким образом, что неправильно вставить устройство невозможно.
После установки в разъем на устройстве загорится индикатор.
Теперь нам понадобится сама программа. Мы (сотрудники интернет-магазина «Азиада») пользуемся смартфонами на Андроиде, поэтому статью пишем исходя из собственного опыта. На смартфонах с другими операционными системами процесс будет очень похож, мы уверены, что Вы без труда разберётесь.
Итак, открываем Google Play Market. Существует большое количество программ для диагностики, они отличаются возможностями, интерфейсом и т.д.. Лично мы используем программу Torque – управление в ней интуитивно понятно и не требует каких-либо особых знаний. Впоследствии Вы всегда сможете установить другой софт.
Впоследствии Вы всегда сможете установить другой софт.
Рис. 2. Приложения в Play Market при поисковом запросе «Torque»
Вбив в поисковую строку «Torque», мы увидим, что таких программ две – платная версия и бесплатная (см. рис. 2). Для начала есть смысл не тратить деньги и поставить бесплатную версию. В 99% случаев ее возможностей достаточно.
Устанавливаем…
И получаем вот такой ярлык на рабочем столе:
Рис. 3. Ярлык программы «Torque» на рабочем столе
Теперь нам нужно соединить смартфон и автомобильный диагностический сканер кодов через Bluetooth. Соединение происходит в два этапа – первым этапом мы должны объяснить Андроиду, что у нас есть новое Bluetooth – устройство и нам нужно его подключить к телефону. Вторым этапом мы должны объяснить программе Torque, что подключенное по беспроводному каналу устройство и есть наш сканер.
Для этого открываем в вашем телефоне «настройки», выбираем закладку «Bluetooth», затем в списке ищем сканер. Если его там нет – вытащите и установите его в разъем еще раз, возможно, он просто впал в «спящий режим».
Если его там нет – вытащите и установите его в разъем еще раз, возможно, он просто впал в «спящий режим».
Рис. 4. Подключение автомобильного диагностического сканера через Bluetooth
Иногда прибор определяется весьма странно, например, как на рисунке – 00:11:10:24:03:49. Но после того, как Вы его подключите, он обретет свое «настоящее» имя и станет называться Aut-Tech.
Итак, щелкаем на устройство в списке. Выскочит окошко, в котором нужно будет ввести пароль – 1234. Возможно, у других устройств пароль будет другим, но это всегда простейшее сочетание символов – 1111, 0000, 1234, 123456 и так далее. После ввода пароля нажмите клавишу «ОК».
Рис. 5. Запрос пароля для подключения
Устройство будет подключено. Обратите внимание на забавный факт – на многих смартфонах значок беспроводного соединения не меняет цвет!
Тем не менее, в списке появится надпись – «авторизовано».
Рис. 6. Устройство Aut-Tech авторизовано
Теперь запускаем саму программу. Затем на экране щёлкаем на кнопку с шестеренкой – это «настройки». В зависимости от типа Вашего устройства и диагонали экрана внешний вид может отличаться от наших картинок. В некоторых случаях настройки вызываются нажатием на отдельную кнопку на корпусе смартфона. Это зависит только от модели аппарата, который Вы используете.
Затем на экране щёлкаем на кнопку с шестеренкой – это «настройки». В зависимости от типа Вашего устройства и диагонали экрана внешний вид может отличаться от наших картинок. В некоторых случаях настройки вызываются нажатием на отдельную кнопку на корпусе смартфона. Это зависит только от модели аппарата, который Вы используете.
После нажатия появится меню, в котором выбираем «настройки»:
Рис. 7. Кнопка «Меню» в программе «Torque»
В настройках среди прочего нам нужно проверить раздел «Connection» — должно быть установлено «Bluetooth» (бывают адаптеры с подключением по Wi-Fi, настраиваются практически так же).
И самое главное – нажмите на раздел «Device». Выскочит список всех устройств, которые Вы подключали по Bluetooth – Ваши гарнитуры, беспроводные колонки и прочее. В списке выберите Aut-Tech – это и есть наш диагностический сканер.
Рис. 8. Интересующие нас пункты меню
Рис. 9. Выбор устройства Bluetooth
Примечание: В нашем случае мы ничего не подключали к данному планшету ранее, поэтому в списке и присутствует только «Aut-Tech».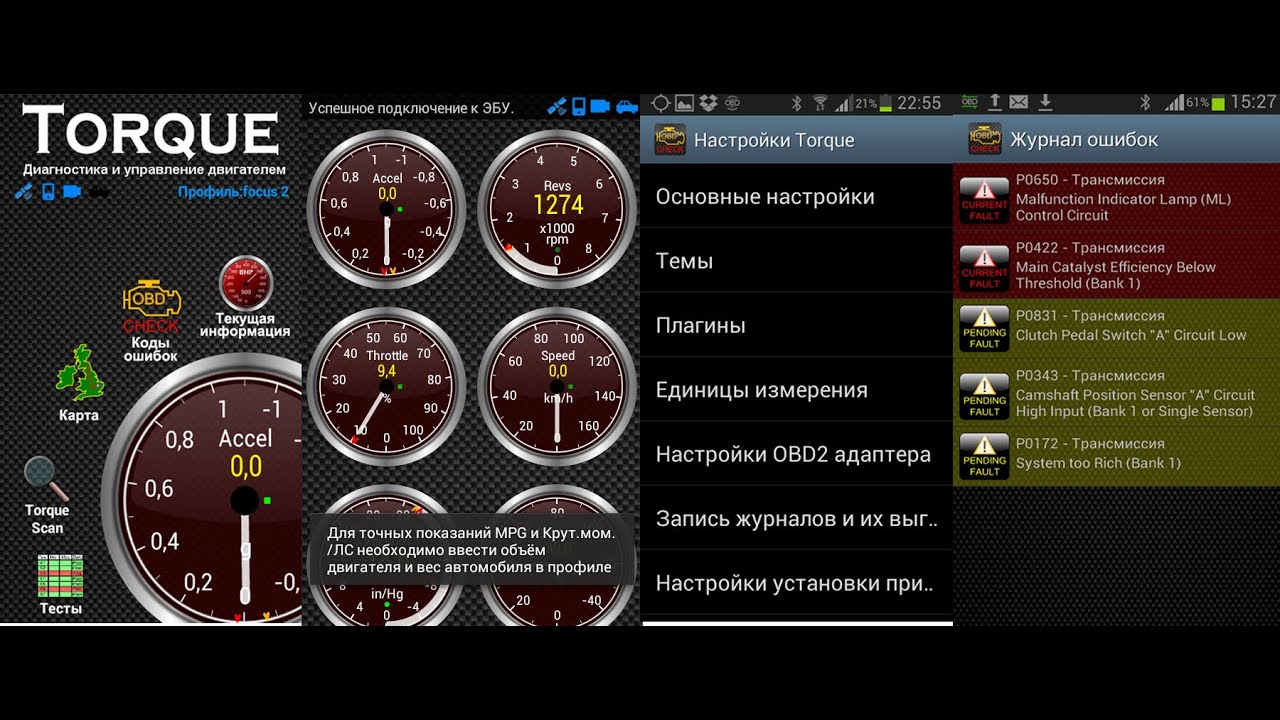 У Вас ситуация может быть немного иная.
У Вас ситуация может быть немного иная.
ПОЗДРАВЛЯЕМ! УСТРОЙСТВО ПОДКЛЮЧЕНО И РАБОТАЕТ!
Как это проверить? Самый простой вариант – считать показания какого-либо датчика. Идеально для этих целей подходит датчик напряжения на аккумуляторе. Для этого в основном меню программы на пустом поле задержите палец на несколько секунд. Появится меню, выберите «Add Display» -> «Display» -> «Voltage». Выберите желаемый размер дисплея, и он будет помещен на рабочий стол программы. Заведите машину – и индикатор покажет напряжение – 14 вольт когда машина заведена, или 12 вольт если мотор заглушен.
Рис. 10. Напряжение на аккумуляторе
Система очередей | Кластер ИВМ РАН
На кластере используется новая система очередей Slurm. Информация на этой странице более неактуальна и приводится только для справки.
Для того чтобы запустить задачу на кластере, необходимо использовать систему управления заданиями TORQUE Resource Manager. Обычно для этого создается специальный скрипт, и ставится в очередь с помощью команды qsub. Этот скрипт содержит информацию о необходимых ресурсах (число узлов кластера, необходимое количество оперативной памяти и необходимое время). В остальном этот скрипт является обычным bash-скриптом, в нем можно настроить нужные переменные среды и запустить необходимую программу. Этот скрипт будет запущен лишь на одном ядре из выделенного списка. В обязанности скрипта входит запуск программы на всех остальных узлах, например, с помощью mpiexec.
Обычно для этого создается специальный скрипт, и ставится в очередь с помощью команды qsub. Этот скрипт содержит информацию о необходимых ресурсах (число узлов кластера, необходимое количество оперативной памяти и необходимое время). В остальном этот скрипт является обычным bash-скриптом, в нем можно настроить нужные переменные среды и запустить необходимую программу. Этот скрипт будет запущен лишь на одном ядре из выделенного списка. В обязанности скрипта входит запуск программы на всех остальных узлах, например, с помощью mpiexec.
Пример #
Начнем с простого примера для задачи sleep на одно ядро с максимальным временем выполнения 5 минут.
Создайте файл sleep.qs со следующим содержимым:
#!/bin/bash
#PBS -N sleep
#PBS -l nodes=1
#PBS -l walltime=05:00
echo "Start date: $(date)"
sleep 60
echo " End date: $(date)"
Отправка задачи на кластер осуществляется с помощью команды qsub:
qsub sleep.qs
Строчки, начинающиеся с #PBS, содержат параметры для команды qsub.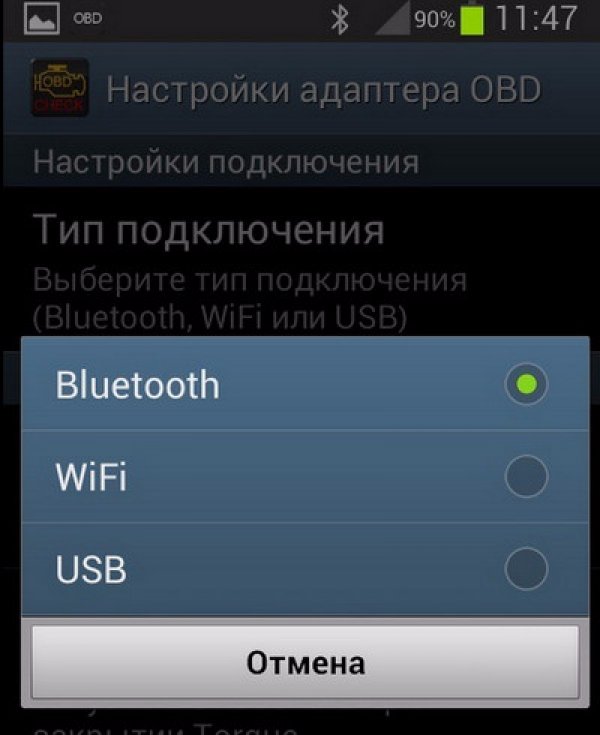 Эти параметры можно также указывать явно при вызове
Эти параметры можно также указывать явно при вызове qsub. Например:
qsub -N sleep -l nodes=1 -l walltime=5:00 sleep.qs
Параметры, отвечающие за выделение ресурсов можно указывать через запятую:
qsub -l nodes=1,walltime=5:00 sleep.qs
Команда
qsub #Основные параметры команды qsub:
-d path
Определяет рабочую директорию для задания. Если не задана, то рабочей является домашняя директория пользователя.-e path-o path
Задаются имена файлов ошибок (stderr), и стандартного вывода (stdout). По умолчанию это файлы<имя_задачи>.e<job_id>и<имя_задачи>.o<job_id>в текущей директории.-j oe-j eo
Объединение файлов вывода/ошибок.oe— файлы объединяются в стандартный файл вывода (stdout),eo— в файл ошибок (stderr).-m aben
События, при которых отправлять уведомления по e-mail.a— в случае аварийного прекращения задачи,b— в момент запуска задачи,e— в момент завершения задачи,n— не отправлять уведомления. Можно указать несколько букв изabeили одну буквуn. По умолчанию используется толькоa.-M e-mail
Адрес получателя, или список адресов получателей через запятую, которым будут отправлены уведомления. По умолчанию — хозяин задачи.-N name
Определяет имя задачи.-q queue
Задаёт очередь в которую добавляется задача. На сервере есть несколько очередей. По умолчанию задачи ставятся в очередьx6core.-l resource_list
Определяет список ресурсов, необходимых для задачи.

Основные ресурсы (используются с опцией -l):
nodes=Nnodes=M:ppn=K
Определяет необходимое количество ядер или узлов. В первом случае запрашивается Nядер,Nможет быть от 1 до 432. Во втором случае запрашиваетсяMузлов, на каждом из которых используютсяKядер. Например,nodes=24запросит 24 ядра,nodes=3:ppn=8запросит 3 узла по 8 ядер,nodes=6:ppn=4запросит 6 узлов по 4 ядра на каждом. По умолчанию выделяется одно ядро.pmem=sizepvmem=size
Определяет необходимое одному процессу количество физической и виртуальной памяти соответственно. Размер указывается с помощью целого числа и суффикса:b,kb,mb,gb. Например,pvmem=1gbпопросит 1 Гб виртуальной памяти для каждого процесса. По умолчанию ограничение отсутствует. Однако в этом случае если задача выделит слишком много памяти, то она может зависнуть, и подвесить сам вычислительный узел.walltime=time
Определяет максимальное время выполнения задачи. По истечении этого времени программа будет завершена. По умолчанию устанавливается значение 6 часов. Ограничение на максимальное значение составляет 24 часа. Пример: walltime=1:45:00— прекратить выполнение задачи через 1 час 45 минут.
 В первом случае запрашивается
В первом случае запрашивается  По истечении этого времени программа будет завершена. По умолчанию устанавливается значение 6 часов. Ограничение на максимальное значение составляет 24 часа. Пример:
По истечении этого времени программа будет завершена. По умолчанию устанавливается значение 6 часов. Ограничение на максимальное значение составляет 24 часа. Пример: Переменные окружения, которые устанавливает Torque:
PBS_O_WORKDIR
Директория, в которой находился пользователь во время отправки задачи в очередь.PBS_JOBID
Уникальный номер задачи.PBS_O_HOST
Текущий узел, на котором запущен скрипт.PBS_NODEFILE
Файл, в котором перечислены все выделенные узлы.
Дополнительную информацию можно получить на странице документации Torque.
Команда
qstat #Просмотреть состояние задач в очереди можно с помощью команды qstat. Команда qstat -a даст несколько больше информации. Текущее состояние задачи отмечено в столбце S.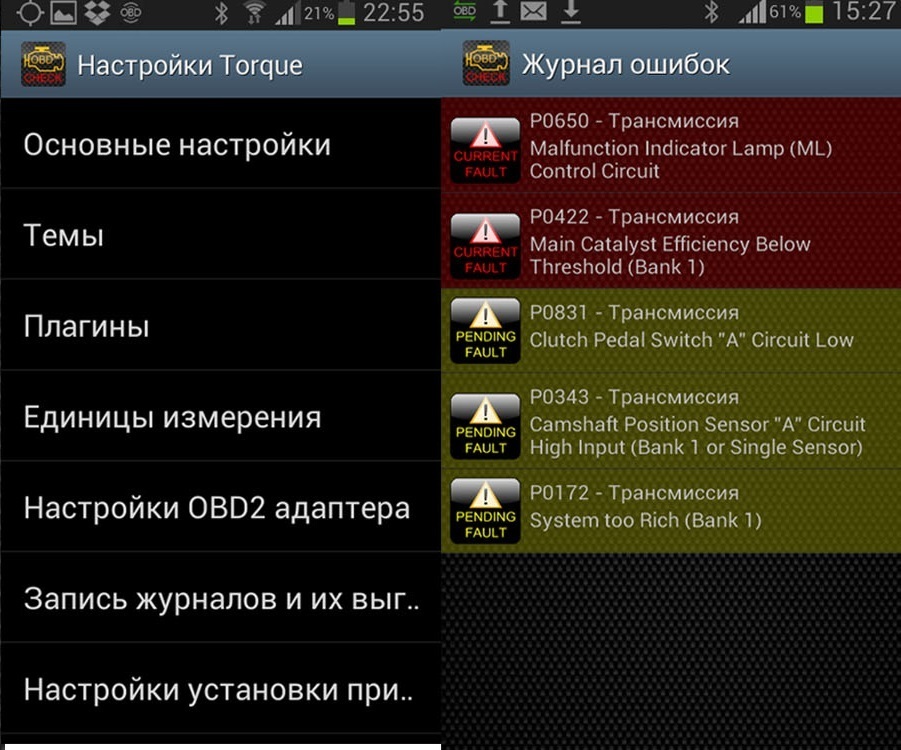
- Q — задача находится в очереди, ждет освобождения ресурсов.
- R — задача в данный момент выполняется.
- E — задача завершается, файл стандартного вывода и файл ошибок копируются на головной узел.
- C — задача завершилась. Информация о выполненных задачах хранится 5 минут.
С помощью команды qstat -n можно получить информацию о том, какие именно ядра выделены для запущенных задач.
Команда
qdel #Если по каким-то причинам задача так и не начала запускаться, например, запрошено слишком много ядер, или памяти, то удалить задачу из очереди можно с помощью команды qdel <job_id>. Точно так же задачу можно удалить, если она уже выполняется (при этом она будет сразу завершена).
Программа
pbstop #pbstop позволяет мониторить основную информацию о состоянии кластера (общая информация, занятость узлов и очередь задач). Для выхода из программы нажмите клавишу
Для выхода из программы нажмите клавишу q.
Пример вывода pbstop:
Usage Totals: 420/480 Procs, 25/28 Nodes, 12/12 Jobs Running 16:51:05
Node States: 4 free 23 job-exclusive 1 offline
Visible CPUs: 0,1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23
1 2
-------------------------------------------------
cl1n001 ................ pppp............ [x8core e5core mix]
cl1n003 pppppppppppppppp PPPPPPPPPPPPPPPP [x8core e5core mix]
cl1n005 yyyyyyyyyyyyyyyyyyyyyyyy PPPPPPPPPPPPPPPPPPPPPPPP [x12core e5core mix]
cl1n007 yyyyyyyyyyyyyyyyyyyyyyyy dddddddddddddddddddddddd [x12core e5core mix]
cl1n009 DDDDDDDDDDDDDDDDDDDDDDDD yyyyyyyyyyyyyyyyyyyyyyyy [x12core e5core mix]
cl1n011 gggggggggggggggggggggggg yyyyyyyyyyyyyyyyyyyyyyyy [x12core e5core mix]
cl1n013 pppppppppppppppppppp ... .....PPPPPPPPPPPP [x10core e5core mix]
cl1n015 EEEEEEEEEEEEEEEEEEEE PPPPPPPPPPPPPPPPPPPP [x10core e5core mix]
cl1n031 tttttttttttt GGGGGGGGGGGG [x6core mix]
cl1n033 tttttttttttt tttttttttttt [x6core mix]
cl1n035 CCCCCCCCCCCC BBBBBBBBBBBB [x6core mix]
cl1n037 ............ tttttttttttt [x6core mix]
cl1n039 AAAAAAAAAAAA tttttttttttt [x6core mix]
cl1n041 tttttttttttt %%%%%%%%%%%% [x6core mix]
-------------------------------------------------
[.] idle [@] busy [*] down [%] offline [!] other [?] unknown
Job# Username Queue Jobname CPUs/Nodes S Elapsed/Requested
P = 66851 perezhog e5core nse2d 72/72 R 17:13:43/24:00:00
p = 66863 perezhog e5core nse2d 40/40 R 00:52:17/24:00:00
E = 66865 goyman x10core slm 20/1 R 00:24:31/12:00:00
y = 66847 yakovlev x12core SLO. =.INMCM 96/96 R 22:20:10/24:00:00
D = 66853 dinar x12core EXP2019_run+.exe 24/1 R 03:35:41/24:00:00
d = 66861 dinar x12core EXP2019_run-.exe 24/1 R 01:02:25/24:00:00
g = 66864 goyman x12core slm 24/1 R 00:29:51/12:00:00
C = 66854 galin x6core a19f1Rm75.out 12/1 R 09:22:17/24:00:00
A = 66855 galin x6core a19f2Rm75.out 12/1 R 09:22:22/24:00:00
G = 66856 galin x6core a19f1Rm25.out 12/1 R 09:22:23/24:00:00
B = 66857 galin x6core a19f2Rm25.out 12/1 R 09:21:25/24:00:00
t = 66866 terekhov x6core STDIN 72/6 R /02:00:00
 .....PPPPPPPPPPPP [x10core e5core mix]
cl1n015 EEEEEEEEEEEEEEEEEEEE PPPPPPPPPPPPPPPPPPPP [x10core e5core mix]
cl1n031 tttttttttttt GGGGGGGGGGGG [x6core mix]
cl1n033 tttttttttttt tttttttttttt [x6core mix]
cl1n035 CCCCCCCCCCCC BBBBBBBBBBBB [x6core mix]
cl1n037 ............ tttttttttttt [x6core mix]
cl1n039 AAAAAAAAAAAA tttttttttttt [x6core mix]
cl1n041 tttttttttttt %%%%%%%%%%%% [x6core mix]
-------------------------------------------------
[.] idle [@] busy [*] down [%] offline [!] other [?] unknown
Job# Username Queue Jobname CPUs/Nodes S Elapsed/Requested
P = 66851 perezhog e5core nse2d 72/72 R 17:13:43/24:00:00
p = 66863 perezhog e5core nse2d 40/40 R 00:52:17/24:00:00
E = 66865 goyman x10core slm 20/1 R 00:24:31/12:00:00
y = 66847 yakovlev x12core SLO.
.....PPPPPPPPPPPP [x10core e5core mix]
cl1n015 EEEEEEEEEEEEEEEEEEEE PPPPPPPPPPPPPPPPPPPP [x10core e5core mix]
cl1n031 tttttttttttt GGGGGGGGGGGG [x6core mix]
cl1n033 tttttttttttt tttttttttttt [x6core mix]
cl1n035 CCCCCCCCCCCC BBBBBBBBBBBB [x6core mix]
cl1n037 ............ tttttttttttt [x6core mix]
cl1n039 AAAAAAAAAAAA tttttttttttt [x6core mix]
cl1n041 tttttttttttt %%%%%%%%%%%% [x6core mix]
-------------------------------------------------
[.] idle [@] busy [*] down [%] offline [!] other [?] unknown
Job# Username Queue Jobname CPUs/Nodes S Elapsed/Requested
P = 66851 perezhog e5core nse2d 72/72 R 17:13:43/24:00:00
p = 66863 perezhog e5core nse2d 40/40 R 00:52:17/24:00:00
E = 66865 goyman x10core slm 20/1 R 00:24:31/12:00:00
y = 66847 yakovlev x12core SLO. =.INMCM 96/96 R 22:20:10/24:00:00
D = 66853 dinar x12core EXP2019_run+.exe 24/1 R 03:35:41/24:00:00
d = 66861 dinar x12core EXP2019_run-.exe 24/1 R 01:02:25/24:00:00
g = 66864 goyman x12core slm 24/1 R 00:29:51/12:00:00
C = 66854 galin x6core a19f1Rm75.out 12/1 R 09:22:17/24:00:00
A = 66855 galin x6core a19f2Rm75.out 12/1 R 09:22:22/24:00:00
G = 66856 galin x6core a19f1Rm25.out 12/1 R 09:22:23/24:00:00
B = 66857 galin x6core a19f2Rm25.out 12/1 R 09:21:25/24:00:00
t = 66866 terekhov x6core STDIN 72/6 R /02:00:00
=.INMCM 96/96 R 22:20:10/24:00:00
D = 66853 dinar x12core EXP2019_run+.exe 24/1 R 03:35:41/24:00:00
d = 66861 dinar x12core EXP2019_run-.exe 24/1 R 01:02:25/24:00:00
g = 66864 goyman x12core slm 24/1 R 00:29:51/12:00:00
C = 66854 galin x6core a19f1Rm75.out 12/1 R 09:22:17/24:00:00
A = 66855 galin x6core a19f2Rm75.out 12/1 R 09:22:22/24:00:00
G = 66856 galin x6core a19f1Rm25.out 12/1 R 09:22:23/24:00:00
B = 66857 galin x6core a19f2Rm25.out 12/1 R 09:21:25/24:00:00
t = 66866 terekhov x6core STDIN 72/6 R /02:00:00
На кластере действует несколько очередей для задач. Все узлы кластера разбиты на несколько групп. Каждая очередь может использовать только узлы из одной или нескольких определённых групп. Для каждой очереди устанавливается своё ограничение по времени выполнения задачи. Также есть возможность ограничения доступа разных групп пользователей к разным очередям.
Также есть возможность ограничения доступа разных групп пользователей к разным очередям.
| Очередь | cl1n001–cl1n004 | cl1n005–cl1n012 | cl1n013–cl1n016 | cl1n017–cl1n020 | cl1n031–cl1n038 | Всего ядер | Макс. время |
|---|---|---|---|---|---|---|---|
| x6core | + | 96 | 24 ч. | ||||
| x8core | + | 64 | 24 ч. | ||||
| x10core | + | 80 | 24 ч. | ||||
| x12core | + | 192 | 24 ч. | ||||
| mix | + | + | + | + | 432 | 12 ч. | |
| e5core | + | + | + | 336 | 24 ч. |
Чтобы отправить задачу, например, в очередь x12core нужно добавить параметр -q x12core для комады qsub:
qsub -q x12core -N big-problem -l nodes=2:ppn=24 qbig. qs
 qs
qs
Или добавить строчку
в скрипт для qsub.
По умолчанию в настоящее время используется очередь x6core.
Установка и настройка TORQUE | Destio
Написал Зеленая Буковка 2011-11-27 в раздел LinuxОбновлено: 2019-08-15
TORQUE — открытая версия PBS (Portable Batch System) для организации распределенных вычислений. Это мощная, гибкая и хорошо масштабируемая система, при этом ее установка и настройка не представляет особой сложности, поэтому ее можно использовать для обеспечения удобной работы на кластере любых размеров, да и хотя бы одном компьютере с несколькими пользователями.
Все ниженаписанное полностью справедливо для TORQUE 2.4.8. Большая часть справедлива и для остальных версий, например, в TORQUE 2.5.9 при сборке RPM получается куда больше пакетов, которые нужно установить, хотя в остальной настройке ничего не меняется.
Установка и инициализация TORQUE
Исходники лежат на оффсайте. После сборки RPM с помощью приложенного .spec-файла, получится 5 готовых RPM-пакетов:
После сборки RPM с помощью приложенного .spec-файла, получится 5 готовых RPM-пакетов:
torque torque-client torque-devel torque-scheduler torque-server
На сервере нужно установить все, кроме torque-devel, а на остальные ноды кластера хватит самого torque + torque-client
После установки на сервере в автозапуске должны быть сервисы pbs_server, pbs_sched, а на каждой ноде (и сервере если он тоже будет одной из нод) единственный процесс pbs_mom
Рабочей директорией по умолчанию является /var/spool/torque/
После установки нужно инициализировать сервер, что можно сделать командой
pbs_server -t create
Чтобы все ноды были видны с сервера, их заресолвленные имена должны быть вписаны в ./server_priv/nodes, а на каждой ноде в ./torque/mom_priv/config вписать строку $pbsserver имя_сервера
Проверить правильность установки нод можно командой
pbsnodes -a
завершить процесс можно командой
qterm -t quick
Простейший способ проверки работоспособности установленной системы:
echo "sleep 30" | qsub
Это задание провисит 30 секунд и сдохнет. Если задания висят в очереди и не хотят работать, то нужно проверить наличие запущенного pbs_sched и состояние сервера:
Если задания висят в очереди и не хотят работать, то нужно проверить наличие запущенного pbs_sched и состояние сервера:
qmgr -c 'list server'
Нормальное рабочее состояние сервера это server_state = Active, если вместо Active там Idle, то нужно перезапустить pbs_server с параметром -a
В дальнейшем для запуска pbs_serverдостаточно просто команды
# pbs_server
Работа с очередями
Создание новой очереди и задание ключевых параметров:
qmgr -c "create queue batch queue_type=execution" qmgr -c "set queue batch started=true" qmgr -c "set queue batch enabled=true" qmgr -c "set queue batch resources_default.nodes=1" qmgr -c "set queue batch resources_default.walltime=3600" qmgr -c "set server scheduling = True"
Время указывается в секундах.
Установить очередь по умолчанию:
qmgr -c "set server default_queue=batch"
Установка заданий в очередь
Ставить задания в очередь с помощью команды qsub:
qsub -l nodes=nodesnum -V -q queuename tg
-l указывает на количество запрашиваемых ресурсов, например nodes=3:ppn=4 потребует по 4 ядра на каждой из 3-х нод.
Чтобы запустить процесс на определенной ноде, нужно ее явно указать в nodes. Например nodes=node1:ppn=2 запустит процесс на node1.
-V очень важный параметр, показывает что TORQUE следует использовать пользовательские переменные окружения, без нее он даже ~/bin не найдет.
-q это название очереди
tg это название специального скрипта, в простейшем виде выглядящего так:
#PBS -N test #PBS -l nodes=1,walltime=999:00:00 #PBS -S /bin/sh # #cd to your execution directory first cd $PBS_O_WORKDIR program_name
-N название задания
-l параметры выделения ресурсов (используются если они не заданы явно в qsub)
Скорее всего, есть способы ставить задания в очередь и без промежуточных скриптов, но и с ними неплохо. Если qsub запускать без параметров, то будут использоваться параметры задания из tg, если их нет и там, то из свойств запускаемой очереди.
Чтобы была возможность ставить задания в очередь с любой ноды
qmgr -c 'set server allow_node_submit=true'
Управление заданиями в очереди
qstat -a просмотреть полный список заданий в очереди
qdel number удалить задание number из очереди (только для владельца задания и администраторов)
qdel all удалить все задания из очереди
Чтобы можно было смотреть все задания в очереди, а не только свои:
qmgr -c "set server query_other_jobs=true"
Чтобы команда qstat была доступна с любой ноды, нужно вписать корректное имя сервера в файл /var/spool/torque/server_name
Выполнение задания можно приостановить командой:
qsig -s suspend PID
При этом следующее в очереди задание пойдет в работу. Чтобы возобновить выполнение нужна команда:
qsig -s resume PID
Типичные ошибки в работе
Ярлыки: TORQUE
Ближайшие сообщения:
- « Проприетарные видеодрайверы ATI для openSUSE
- MPI »
Похожие сообщения:
Подключение автосканеров ELM327 к ОС Андроид
Для оперативной диагностики легковых и грузовых автомобилей предназначены сканеры ELM327. Это компактные устройства, позволяющие выявлять и устранять ошибки в работе электроники и основных систем транспортных средств. Они простые в эксплуатации, надежные, компактные и недорогие.
Это компактные устройства, позволяющие выявлять и устранять ошибки в работе электроники и основных систем транспортных средств. Они простые в эксплуатации, надежные, компактные и недорогие.
Современные диагностические адаптеры ELM327 совместимы с операционными системами Android, Windows и iOS. Они с легкостью подключаются к стационарным компьютерам, планшетам и смартфонам. Для этого может использоваться сеть Wi-Fi, Bluetooth или USB-кабель. Независимо от того, какой модели устройства вы отдали предпочтение, подключить диагностический адаптер к гаджету, работающему на ОС Android, не составит труда. С этой задачей справится даже неопытный автовладелец.
Подключение ELM327 Wi-Fi к Android: пошаговая инструкция
Чтобы выполнить диагностику автомобиля с помощью сканера OBDII и смартфона, действуйте следующим образом:
- Вставьте диагностический адаптер ELM327 в предназначенный для него разъем и дождитесь, пока на приборе замигают огоньки. Обычно это происходит в течение 10 – 20 секунд и свидетельствует о том, что устройство готово к работе. Обратите внимание, что двигатель автомобиля в это время должен быть включен.
- Войдите в список доступных Wi-Fi сетей на своем телефоне и найдите в нем WiFi_OBD2. В открывшемся окошке коснитесь надписи «Изменить сеть», а затем выберите пункт «Дополнительно» или «Расширенные параметры» (в зависимости от версии ОС).
- Нажмите последовательно «Настройки IP» и «Пользовательские», а затем введите в специальное окошко IP-адрес диагностического адаптера. После этого вам останется только сохранить внесенные изменения.
- Далее войдите в приложение Torque или воспользуйтесь другой программой для диагностики электроники авто (это может быть OpenDiag Mobile, HobDrive и т.д.). Нажмите кнопку «Состояние адаптера».
- Перейдите в раздел «Настройки», выберите «Тип подключения» и нажмите «Wi-Fi». Убедившись, что IP-адрес сканера ELM327 отображается правильно, начинайте процедуру диагностики.
 Обратите внимание, что двигатель автомобиля в это время должен быть включен.
Обратите внимание, что двигатель автомобиля в это время должен быть включен.Практика показывает, что большинство автовладельцев используют для оценки состояния транспортных средств программу Torque. Это не удивительно, поскольку она обычно поставляется в комплекте с диагностическим сканером. Но вы можете отдать предпочтение и другому приложению – последовательность действий, необходимых для настройки устройства, не претерпит значительных изменений.
Это не удивительно, поскольку она обычно поставляется в комплекте с диагностическим сканером. Но вы можете отдать предпочтение и другому приложению – последовательность действий, необходимых для настройки устройства, не претерпит значительных изменений.
Как выполнить подключение ELM327 Bluetooth к Android
Если вы купили диагностический адаптер ELM327 с Bluetooth, соединить его с телефоном, работающим на Андроид, также не составит труда. Действовать в данном случае нужно последовательно:
- Вставьте сканер в предназначенный для него разъем, запустите двигатель машины или включите зажигание. Дождитесь, пока на корпусе устройства загорится лампочка или просто засеките 20 секунд.
- Войдите в меню своего смартфона и выберите «Настройки Bluetooth». Отметьте пункт «Видно другим» и нажмите на кнопку «Поиск устройств».
- Когда смартфон обнаружит диагностический адаптер ELM327, в списке доступных устройств появится «OBDII». Нажмите на него, чтобы добиться сопряжения автосканера с вашим телефоном.
- Введите ключ доступа в предназначенное для него окошко. Это может быть комбинация 1234 или 6789, 1111 или 0000.
- Войдите в приложение, которое будет использоваться вами для диагностики автомобиля. В разделе «Настройки» нажмите кнопку «Тип подключения» и выберите Bluetooth. Сохраните настройки и покиньте программу.
- Ещё раз войдите в приложение и запустите проверку состояния электроники и других систем транспортного средства.

Схемы соединения диагностического адаптера OBD2 со смартфоном, работающим на ОС Android, посредством Wi-Fi и Bluetooth во многом похожи. Какому бы варианту вы не отдали предпочтение, важно делать всё аккуратно и чётко придерживаться инструкции.
Подключение ELM327 USB к Android: основные этапы
Если вы собираетесь использовать для проверки правильности функционирования электроники транспортного средства ноутбук или планшет, выполните подключение адаптера ELM327 USB к Android. Сделать это можно в несколько этапов:
- Скачайте USB-драйвер для диагностического автосканера, которым вы пользуетесь. Для этого нужно предварительно получить Root-Права на Андроид.
- Разархивировав драйвер, войдите в папку D2XXSample\bin и выберите программу D2XXSample.apk. Вы должны установить её на свой планшет или ноутбук. Если не получится с первого раза, войдите в D2XXSample\obj\local\armeabi и, выбрав файл libftd2xx-jni.so, перенесите его в системную папку своего электронного гаджета data/data/com.ftdi.d2xx. После этого установить программу D2XXSample.apk не составит труда.
- Скачайте на планшет или ноутбук приложение Torque или другой инструмент для диагностики автомобилей. Откройте эту программу, в разделе «Настройки» нажмите «Тип подключения» и выберите «USB». Выполнив указанные действия, вы сможете приступить к проверке качества работы авто.
 Для этого нужно предварительно получить Root-Права на Андроид.
Для этого нужно предварительно получить Root-Права на Андроид.Использовать USB-кабель для соединения диагностического адаптера OBDII с планшетом или ноутбуком целесообразно только в том случае, если сканер не поддерживает Wi-Fi и Bluetooth. Это не очень удобный и более трудоемкий вариант, ведь вам придётся дополнительно получить Root-Права на Андроид.
Подключение адаптера ELM327 Wi-Fi к смартфону на ОС Android
В интернете на различных форумах часто встречается мнение, что адаптер ELM327 Wi-Fi не работает с Android устройствами. Доля правды в этом есть — смартфоны со старыми версиями ОС Android (например, 2.2) действительно не умели работать с адаптером из-за отсутствия поддержки Ad Hoc сетей. Проблему могли решить сторонние приложения вроде Ad Hoc enabler, но не каждый хотел в этом разбираться. Теперь же Google Android официально получил поддержку данной функции и подключение ELM327 Wi-Fi к Android осуществляется штатными средствами. На нашем телефоне с версией Android 4.2.2 уже есть штатная поддержка.Для наглядности я приготовил для вас пошаговую инструкцию со всеми скриншотами. Что ж, начнём!
Адаптер ELM327 Wi-Fi, который мы будем подключать к нашему смартфону. Приобрести этот адаптер вы можете у нас же: elm327rus.ru/elm327-wifi/
Подключаем наш адаптер к гнезду OBDII, ждём 15-20 секунд. .. На адаптере замигали индикаторы — он готов к работе.
.. На адаптере замигали индикаторы — он готов к работе.
Открываем на смартфоне список Wi-Fi сетей. У вас должна появиться сеть WiFi_OBDII (название может быть другим, например, OBD2 или WiFi_OBD).
После подключения лёгким движением зажимаем название сети и в появившемся пункте выбираем «Изменить сеть«.
На открывшихся параметрах ставим галочку «Дополнительно» (в некоторых версиях «Расширенные параметры»).
Жмём на «Настройки IP» и выбираем «Пользовательские«.
На данном этапе нам нужно прописать IP адрес нашего устройства в существующей сети Wi-Fi. Убедитесь, что стоит значение отличное от 192.168.0.10, так как это адрес самого адаптера! Мы, например, выставили 192.168.0.15.
Остальные настройки оставляем как есть, нажимаем «Сохранить«.
Убедитесь, что после изменения настроек вы подключены к адаптеру. У сети должен быть статус «Подключено«. Всё ок? Выходим из настроек и открывает программу Torque.
Всё ок? Выходим из настроек и открывает программу Torque.
На открывшемся экране выбираем «Состояние адаптера«.
Листаем в самый низ и жмём «Настройки«.
Заходим в меню «Настройки адаптера OBD«.
В появившемся окне нажимаем «Тип подключения» и выбираем «WiFi«.
Убедитесь, что в настройках прописан IP адрес адаптера 192.168.0.10 и указан порт 35000. Если прописаны другие данные — поменяйте.
Настройка закончена, пользуемся!
Мы считали ошибку кислородного датчика. Желаю, чтобы на вашем автомобиле никогда не было ошибок 🙂
Аналогичным образом для работы через Wi-Fi адаптер elm327 настраивается и программа HobDrive. Заходим в настройки программы, жмём «Настройки соединения«. В самом низу выбираем «WiFi Соединение«, стираем значения по умолчанию и прописываем «192.168.0.10:35000«, как на скриншоте. Возвращаемся на рабочий экран программы и наблюдаем в левом нижнем углу зелёный кружок, который нам показывает, что программа HobDrive соединилась с автомобилем через Wi-Fi адаптер!
В самом низу выбираем «WiFi Соединение«, стираем значения по умолчанию и прописываем «192.168.0.10:35000«, как на скриншоте. Возвращаемся на рабочий экран программы и наблюдаем в левом нижнем углу зелёный кружок, который нам показывает, что программа HobDrive соединилась с автомобилем через Wi-Fi адаптер!
Надеюсь, статья оказалась для вас полезной. Для тех, кто «шарит» — простите за «разжёвываемость» материала, старался написать простым языком и как можно подробнее, чтобы настроить смогли даже те, кто никогда не держал в руках адаптер 🙂
Если статья вам понравилась — поделитесь ей в соцсетях (кнопочки ниже).
Если хотите скопировать статью на другой сайт — не поленитесь поставить ссылочку на elm327rus.ru в знак благодарности за чистые скриншоты без водяных знаков 🙂Важность знания (и следования) характеристик крутящего момента
Применение точно нужного крутящего момента важно для обеспечения надлежащего зажима, например, между блоком двигателя и натяжителями или холостыми шкивами. Многие механики уверены, что затягивают болты и гайки без использования динамометрического ключа, однако эксперименты показали, что подавляющее большинство из них не может получить более или менее правильный крутящий момент. И последствия приложения слишком большого или слишком малого крутящего момента могут быть ужасными, как мы обсудим ниже.
Многие механики уверены, что затягивают болты и гайки без использования динамометрического ключа, однако эксперименты показали, что подавляющее большинство из них не может получить более или менее правильный крутящий момент. И последствия приложения слишком большого или слишком малого крутящего момента могут быть ужасными, как мы обсудим ниже.
Последствия чрезмерного или недостаточного крутящего момента
Недостаточный крутящий момент
Работающие двигатели склонны к вибрации. Когда вы прикладываете точно нужное количество усилие крепления , вы можете быть уверены, что болт перенесет «удары», а также нагрузку ремня на основную часть двигателя, которая их поглотит. В случае недостаточного крутящего момента именно шпилька или сам болт испытывают все удары, вызывая сдвиг .В качестве альтернативы вибрации двигателя могут привести к отвинчиванию болта или гайки, что приведет к смещению натяжителя. Это, в свою очередь, приведет к неправильному натяжению ремня и, в конечном итоге, к повреждению ремня и / или двигателя .
Шкив слева установлен на блок цилиндров (1) с недостаточным крутящим моментом (3a) , создавая низкую зажимную нагрузку (4a) между опорой шкива и блоком двигателя.Нагрузка от ремня (2) передается непосредственно на стержень болта (5a) , создавая эффект срезания, вызывая отказ болта (6a) . Шкив справа прикреплен к блоку цилиндров (1) с соответствующим крутящим моментом (3b) , создавая правильную зажимную нагрузку (4b) . Нагрузка от ремня (2) передается на блок цилиндров, а не только на стержень болта (5b) ; устранение эффекта сдвига (6b) .
Чрезмерный крутящий момент
Тем не менее, слишком большой крутящий момент одинаково вреден, поскольку повреждает нейлон или пластик в некоторых натяжителях или натяжных шкивах, а также подшипник или повреждает резьбу болта или гайки. Более того, если это произойдет, например, с алюминиевой головкой блока цилиндров, резьба винта в алюминиевом блоке цилиндров будет необратимо повреждена, и впоследствии будет невозможно снова достичь правильной зажимной нагрузки .
Более того, если это произойдет, например, с алюминиевой головкой блока цилиндров, резьба винта в алюминиевом блоке цилиндров будет необратимо повреждена, и впоследствии будет невозможно снова достичь правильной зажимной нагрузки .
Записка о узком пространстве
К настоящему времени должно быть ясно, что точное соблюдение требований к крутящему моменту и использование динамометрического ключа имеет значение. Пространство довольно узкое? Специальный динамометрический ключ закроет сделку. Также обратите внимание, что не для всех болтов M8 или M10 требуется одинаковый момент затяжки!
Специальные настройки крутящего момента
При затяжке гайки / болта приложение только предписанного значения крутящего момента в Нм не гарантирует достижение желаемого усилия зажима; поскольку испытания показали, что возможны довольно большие различия в зажимах.Вот почему многие современные руководства рекомендуют также использовать угол крутящего момента сверх значения крутящего момента (например, 20 Нм + 45 °). Это гарантирует гораздо более точный результат. Кроме того, есть особые случаи, когда в руководстве вам будет предложено приложить крутящий момент, подождать несколько секунд, снова применить крутящий момент, подождать еще немного (и так далее), чтобы гайка или болт успокоились — или, другими словами, : для обеспечения желаемого зажима. Кроме того, 45 Нм + 45 ° + 45 ° — это не то же самое, например, 45 Нм + 90 °.Между двумя поворотами на 45 ° болт «осядет».
Это гарантирует гораздо более точный результат. Кроме того, есть особые случаи, когда в руководстве вам будет предложено приложить крутящий момент, подождать несколько секунд, снова применить крутящий момент, подождать еще немного (и так далее), чтобы гайка или болт успокоились — или, другими словами, : для обеспечения желаемого зажима. Кроме того, 45 Нм + 45 ° + 45 ° — это не то же самое, например, 45 Нм + 90 °.Между двумя поворотами на 45 ° болт «осядет».
Совет по использованию Loctite
Чтобы предотвратить случайное ослабление, многие гайки и болты закреплены с помощью Loctite . Однако будьте осторожны с использованием этого клея в глухом отверстии: нанесение Loctite на болт может закрыть его резьбу, а это значит, что воздух из глухого отверстия не может выйти, когда вы закрутите болт. Сжатый воздух в отверстии может деформироваться. ваше чтение количества приложенного крутящего момента (например,грамм. 20 Нм, а реально цифра ниже). Вот почему мы советуем наносить клей на дно глухого отверстия , а не на сам болт. Естественно, вы должны убедиться, что болт действительно контактирует с клеем.
Естественно, вы должны убедиться, что болт действительно контактирует с клеем.
Настройки крутящего момента — TechWiki
Настройки крутящего момента
Работа с автомобилем означает, что вам нужно подтянуть детали, когда вы их установите. Очень важно использовать правильные уровни крутящего момента. При затяжке болты будут затянуты.
При установке деталей на автомобиль всегда используйте динамометрический ключ!
Слишком большое натяжение означает, что болт будет слишком сильно нагружен и в конечном итоге может сломаться.
Недостаточное натяжение означает, что болт может ослабнуть или двигаться. Это повредит болт и его кронштейны. В конечном итоге это также может привести к катастрофическим сбоям.
Для подвески используйте только болты класса 8,8. (поперечные рычаги, амортизаторы и т. д.) класса 10.9 или даже хуже, болты закалены.
Процесс закалки улучшает максимально возможную нагрузку на болт, но также делает болт относительно хрупким.
Внутри деталей подвески вы бы предпочли увидеть, как болты изгибаются, чем отворачиваются. Болты класса 8.8 имеют тенденцию гнуться, любые закаленные болты имеют тенденцию гнуться.
Ниже приведены рекомендации по уровням крутящего момента для метрических болтов.
Марки болта нанесены на головку болта.
| Размер болта | 8.8 | 10,9 | 12,9 | A2-70 (нержавеющая) |
|---|---|---|---|---|
| 6 мм (M6) | 9 Нм | 13 Нм | 14 Нм | 7 Нм |
| 8 мм (M8) | 23Нм | 33Нм | 40 Нм | 17 Нм |
| 10 мм (M10) | 45 Нм | 65 Нм | 70 Нм | 33Нм |
| 12 мм (M12) | 80 Нм | 115 Нм | 125 Нм | 57 Нм |
| 14 мм (M14) | 125 Нм | 180 Нм | 195 Нм | хх |
| 16 мм (M16) | 195 Нм | 280 Нм | 290Нм | хх |
Обратите внимание, что при установке болтов в резьбу Ally, например, накидные гайки, коллекторы и стойки S1, может потребоваться уменьшение крутящего момента.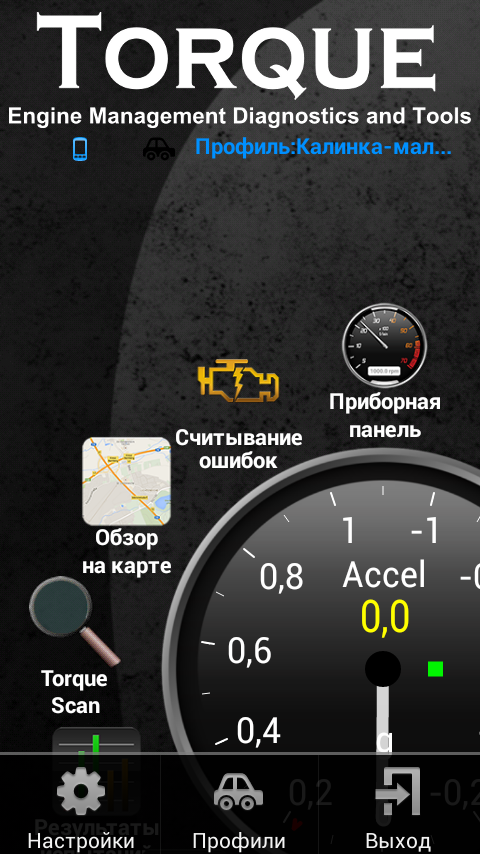
Обратите внимание на то, что при установке болтов в резьбу Ally важно убедиться, что нарезка резьбы достаточна для обеспечения правильного момента затяжки болта без снятия резьбы.
Специальное примечание для Mr. Wiki — это размер резьбы, а не размер головы.
| Настройки крутящего момента подушки двигателя (серия K) | Нм |
|---|---|
| Кронштейн правой опоры двигателя к двигателю | 145 |
| Кронштейн правой опоры двигателя к резиновой опоре | 85 |
| Резиновая опора двигателя правая к шасси | 45 |
| Болты крепления правой стойки двигателя | 85 |
| Кронштейн левой опоры двигателя к резиновой опоре | 85 |
| Кронштейн левой опоры двигателя к двигателю | 45 |
| Кронштейн нижнего люнета к масляному поддону | 85 |
| Болты нижнего рычага подвески | 85 |
Используйте Permabond A130 (A912E7033V) на болте конца поддона на нижнем стабилизирующем рычаге.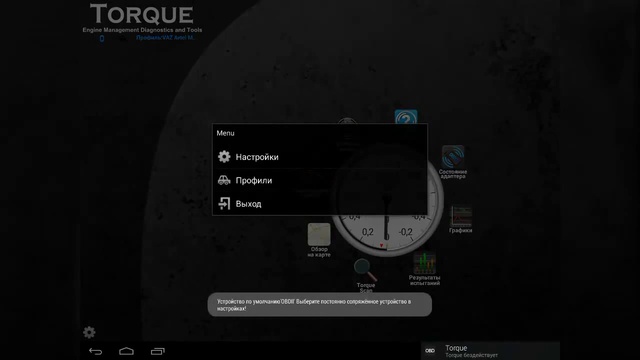
| Настройки крутящего момента передней подвески (S2 K-Series) | Нм |
|---|---|
| Болты шарнира верхнего и нижнего поперечного рычага | 45 |
| Шарнир верхний к рулевому рычагу | 55 |
| Шарнир нижний к цоколю | 55 |
| Рулевой рычаг к держателю ступицы | 45 |
| Конец рулевой тяги к рулевому рычагу | 30 |
| Демпфер к нижнему поперечному рычагу | 45 |
| Демпфер к верхнему анкерному кронштейну | 45 |
| Анкерный кронштейн амортизатора к шасси | 25 |
| Узел подшипника ступицы к держателю ступицы | 90 |
| Тормозной суппорт к держателю ступицы | 45 |
| Хомуты крепления резиновой втулки стабилизатора поперечной устойчивости | 25 |
| Тяги стабилизатора поперечной устойчивости | 45 |
| Настройки крутящего момента задней подвески (S2 K-Series) | Нм |
|---|---|
| Болты шарнира верхнего и нижнего поперечного рычага | 45 |
| Шариковые пальцы верхнего и нижнего шарниров | 55 |
| Цоколь верхнего шарнирного соединения к держателю ступицы | 45 |
| Наружный шаровой шарнир передней тяги к держателю ступицы * | 74 |
| Внутренний шаровой шарнир рычага / рычага к подрамнику ** | 74 *** |
| Стопорные гайки шарового шарнира передней тяги | 55 |
| Демпфер к нижнему поперечному рычагу | 45 |
| Демпфер к шасси | 45 |
| Верхний тормозной суппорт к держателю ступицы (M10) | 45–50 |
| Нижний тормозной суппорт к держателю ступицы (M8) | 26–30 |
| Узел подшипника ступицы к держателю ступицы | 90 |
| Гайка задней ступицы | 220 |
, * Проверить номер партии шарового шарнира 43273 или более поздней версии
, ** Проверить номер партии шаровой опоры 43725 или более поздней версии
, *** На автомобилях 2001 г. в. с серийными номерами VIN.0001 до 0041, плюс 0056 и 0057, используйте 45 Нм
в. с серийными номерами VIN.0001 до 0041, плюс 0056 и 0057, используйте 45 Нм
Hyundai — Диапазон настройки крутящего момента, установлен на верхний предел?
Пару месяцев назад я заменил передние стойки, колодки и роторы на Hyundai Accent. Я использовал это руководство для правильной настройки крутящего момента. Я не привык к диапазону крутящего момента, так как я работал с Chevy с руководствами Haynes, где обычно указаны единичные значения крутящего момента. Не особо задумываясь об этом, я использовал максимальное значение крутящего момента для каждого болта, чтобы все затянуть.Я также использовал синий локтит на всех крепежных деталях (за исключением выступов для колес) для дополнительной безопасности. Прочитав немного, некоторые рекомендуют установить значение крутящего момента немного ниже максимального диапазона.
Я проверил точность своего динамометрического ключа, когда выполнял работу, подвешивая к нему 20-фунтовый груз на 15 дюймов назад со значением крутящего момента 25 фунтов ((15/12) × 20) = 25. Щелкнул .. переместил настройку немного, и он не щелкнет. Кроме того, я всегда сохраняю самые низкие настройки. Так что, похоже, динамометрический ключ не за горами или что-то в этом роде.
Щелкнул .. переместил настройку немного, и он не щелкнет. Кроме того, я всегда сохраняю самые низкие настройки. Так что, похоже, динамометрический ключ не за горами или что-то в этом роде.
Я проехал на машине более 1000 миль с тех пор, как выполнял работы летом, от коротких поездок по ухабистым строительным дорогам до длительных поездок по скоростной автомагистрали.
Я наткнулся на видео на Youtube, в котором упоминался диапазон значений крутящего момента, и они устанавливали его более средний диапазон, между двумя границами. Так что это заставило меня задуматься, я взглянул на руководство и понял, какое значение имеет дальность. Поразмыслив над этим, я задаюсь вопросом, есть ли какие-либо риски поместить его в верхнюю границу диапазона в качестве самостоятельной работы.
Во-первых, нужно ли мне беспокоиться о том, что значение крутящего момента будет в верхнем диапазоне? Я бы подумал, что инженеры не собираются ставить значение крутящего момента чуть ниже точки сдвига болта . .. но я не хочу ничего предполагать в этом случае.
.. но я не хочу ничего предполагать в этом случае.
После работы в жаркий летний день будет ли холодная погода создавать опасность при установке крутящего момента на более высоком диапазоне? И я имею в виду худший случай … Как Вихрь, который был у нас на Среднем Западе пару лет назад, с температурой ниже -20 градусов (без охлаждения ветром).
Я также хочу отметить, что это значение крутящего момента для колеса: «65,1 ~ 79,6 фунт-фут» Мой магазин шин (Discount Tires) выдает мне распечатку, когда я поворачиваю шины. И у них есть настройки крутящего момента на зажимных гайках, указанные на уровне 80 фунтов. Похоже, они чуть выше максимума.
Почему в руководствах по обслуживанию указан диапазон крутящего момента? Есть ли причины быть на одном конце или на другом?
Нет, я думаю, что это больше связано с ожидаемым диапазоном, учитывая огромное количество динамометрических инструментов, технику оператора и отсутствие калибровки у большинства динамометрических ключей .
(И я виноват в той же или большей степени … мой локоть щелкал +/- 2 фунта-фута. Теперь, после четырех десятилетий мучений, мой локоть щелкает, просто пытаясь встать с кровати и пристегнуться ремнем. мои разные фермы …)
Если вы не хотите отправлять свой динамометрический ключ на калибровку (а кто делает это ??), установите его на средний уровень из ваших ручных технических характеристик и будьте счастливы! Имейте в виду, что большинство людей даже не читают руководство, так что вы уже далеко продвинулись в этом деле.
Минимум — это минимум, максимум — это максимум, но на самом деле большинство автомобильных приложений основаны на внутренней резьбе, которая намного слабее, чем любой истинный рейтинг крепежа. Установите на середину, крутящий момент, радуйтесь, у вас все хорошо.
ПРИ РЕДАКТИРОВАНИИ:
Привет, я сторонник регулярных калибровок динамометрических ключей; пожалуйста, не истолковывайте мои старые суровые обычаи неверно. НО, это не всегда легко доступно и / или доступно для обычных людей, занимающихся DIY, а я к ним не отношусь.
НО, это не всегда легко доступно и / или доступно для обычных людей, занимающихся DIY, а я к ним не отношусь.
Я потратил на SnapOn почти столько же, сколько на алименты, и уверяю вас, первое — более выгодное предложение. Когда вы собираете детали подвески, вам нужно хорошо их чувствовать. Не более того. «GoodNtite» здесь работает. Когда вы окончательно затягиваете алюминиевую головку на высокопроизводительном двигателе, вам могут потребоваться специальные смазочные материалы, инструкции, угловой крутящий момент и большой опыт. И, что самое главное, действительно хороший и откалиброванный динамометрический ключ высшего уровня.
Итог: Если вам не все равно, все будет в порядке.Характеристики крутящего момента довольно неряшливы для чего-либо, кроме Rocket Surgury и болтов с головкой, а последние идут с отличными инструкциями и часто специально сделанной смазкой для резьбы.
Я покупаю несколько вещей в Harbour Freight, но мне неловко это признавать. Если вы действительно хотите серьезно заняться чем-нибудь, купите хороший динамометрический ключ Snapon / MAC / Matco (я предлагаю привод 1/2 дюйма) и наслаждайтесь им (с периодической калибровкой) всю оставшуюся жизнь.
Если вы действительно хотите серьезно заняться чем-нибудь, купите хороший динамометрический ключ Snapon / MAC / Matco (я предлагаю привод 1/2 дюйма) и наслаждайтесь им (с периодической калибровкой) всю оставшуюся жизнь.
Как отрегулировать значения крутящего момента при использовании адаптеров крутящего момента
Понимание крутящего момента крепежа и соответствующих значений важно при работе с воздушными устройствами и буровыми вышками экскаватора.Существуют важные крепежные детали, которые требуют периодических проверок крутящего момента, чтобы убедиться, что они равномерно нагружены, а не просто «наощупь» или визуальный осмотр. Иногда бывает непросто получить доступ к болту, который необходимо затянуть до определенного значения на элементе оборудования. Когда другие компоненты мешают, механики могут столкнуться с разборкой оборудования или использованием какого-либо адаптера динамометрического ключа для получения лучшего угла. Адаптер для динамометрического ключа поможет вам работать умнее, а не усерднее, если вы будете делать это правильно.
РИСУНОК 1: Примеры элементов, которые могут повлиять на крутящий момент, прикладываемый к крепежному элементу
Было бы ошибочным полагать, что если вы используете удлинитель между головкой и динамометрическим ключом, вам придется автоматически регулировать значения крутящего момента или хуже , что переходник не требует регулировки положения динамометрического ключа. Это правда, что вы должны отрегулировать настройку динамометрического ключа, если это влияет на расстояние от точки поворота до направления приложения силы к динамометрическому ключу; это неверно, если используется только расширение без адаптера (в большинстве случаев).Вот почему. Чем дальше затягиваемый крепеж находится от точки поворота динамометрического ключа, тем меньше усилий требуется для приложения необходимого крутящего момента к крепежу.
На рисунке выше удлинитель с шарниром и головкой может влиять на крутящий момент в зависимости от угла. Адаптеры повлияют на настройку динамометрического ключа, если расстояние между крепежным элементом и рукояткой динамометрического ключа изменится. Прямое удлинение не повлияет на настройку динамометрического ключа.
Прямое удлинение не повлияет на настройку динамометрического ключа.
Terex Utilities предоставляет технические советы на своем веб-сайте, чтобы предоставить дополнительную информацию о часто задаваемых вопросах, которые получают наши представители по обслуживанию.Следующая информация взята из Технического совета №53. Для получения дополнительной информации посетите www.terex.com/utilities, щелкните «Поддержка», затем выберите «Технические советы». Технический совет №53. Его можно найти в категориях Auger Drill, Digger Derrick или любой категории продуктов Aerial Device.
РИСУНОК 2: При такой ориентации адаптера к гаечному ключу регулировка НЕ требуется.
Не превышайте крутящий момент
Из элементов, которые могут повлиять на крутящий момент, прилагаемый к крепежу (см. Рисунок 1), прямой удлинитель, используемый между головкой и динамометрическим ключом, не влияет на настройку динамометрического ключа.
Любой переходник или смещение, которые изменяют расстояние между осевой линией крепежа и осевой линией привода динамометрического ключа, потребуют регулировки настройки динамометрического ключа. Если никакая регулировка не производится, крепеж не будет иметь правильный крутящий момент.
Если никакая регулировка не производится, крепеж не будет иметь правильный крутящий момент.
Формула для регулировки настройки динамометрического ключа:
Настройка = (длина динамометрического ключа x требуемый крутящий момент) ÷ (длина динамометрического ключа + длина удлинителя адаптера)
Шаг 1. Определите длину удлинителя адаптера или смещение крепежа к моменту затяжки. гаечный ключ, измерив расстояние между следующими центрами.Длина адаптера крутящего момента в этом примере составляет 3 дюйма.
Шаг 2: Измерьте длину динамометрического ключа от центра вращения до центра рукоятки. На рукоятке некоторых гаечных ключей есть метка для справки. Если на динамометрическом ключе нет контрольной метки, отметьте центр области рукоятки для измерения. Длина динамометрического ключа в этом примере составляет 18,5 дюйма.
Шаг 3: (длина динамометрического ключа x желаемый момент затяжки) = (18,5×180) = 3,330
Разделите полученное значение на (длина динамометрического ключа + длина удлинителя адаптера) = (18. 5 + 3) = 21,5 дюйма
5 + 3) = 21,5 дюйма
3330 ÷ 21,5 = 155 фут-фунтов.
Регулировка динамометрического ключа 155 фут-фунтов. требуется для регулировки используемого 3-дюймового адаптера крутящего момента для получения значения крутящего момента 180 фут-фунтов.
Сумма: 155 фут-фунтов. = (18,5 дюймов x 180 фут-фунтов) / (18,5 дюймов + 3 дюйма)
Дополнительные примеры доступны в Интернете в Техническом совете №53.
Рекомендации по поддержанию значений крутящего момента
Критические крепежные детали, такие как те, которые находятся на подшипниках вращения воздушных устройств и буровых вышек экскаваторов, часто требуют от механиков проверки момента затяжки болтов каждые шесть месяцев.Хотя для каждой единицы оборудования будет свой список критически важных крепежных элементов, пользователи с большей вероятностью будут соблюдать рекомендации производителя, если к болтам будет легко получить доступ. При проектировании оборудования Terex Utilities уделяет особое внимание доступности крепежных элементов для целей технического обслуживания, но нехватка места может затруднить доступ к ним. Это не освобождает техника от обязанности проверять все крепежные детали, требующие проверки крутящего момента. Например, воздушные устройства Hi-Ranger новой серии Optima имеют новую конструкцию подставки, которая обеспечивает более легкий доступ для технических специалистов при проверке и затяжке болтов нижнего подшипника вращения, которые теперь доступны с внешней стороны подставки.Но когда это не так, правильное использование адаптера крутящего момента упрощает надлежащий осмотр и техническое обслуживание. Представленные здесь передовые методы применимы к любому болту, который необходимо затянуть до установленного значения. UP
Это не освобождает техника от обязанности проверять все крепежные детали, требующие проверки крутящего момента. Например, воздушные устройства Hi-Ranger новой серии Optima имеют новую конструкцию подставки, которая обеспечивает более легкий доступ для технических специалистов при проверке и затяжке болтов нижнего подшипника вращения, которые теперь доступны с внешней стороны подставки.Но когда это не так, правильное использование адаптера крутящего момента упрощает надлежащий осмотр и техническое обслуживание. Представленные здесь передовые методы применимы к любому болту, который необходимо затянуть до установленного значения. UP
РИСУНОК 3: В этой ориентации требуется регулировка.
Об авторе: Скотт Биттлер — национальный инструктор по обслуживанию и технический специалист Terex Utilities. Он имеет более чем 25-летний опыт работы в магазинах и на местах, является сертифицированным оператором экскаваторной вышки и практическим экзаменатором NCCCO.
| Компонент | Марка | Ньютон-метров | Дюйм-фунты |
|---|---|---|---|
| Колодки тормозные (шпилька с резьбой) | Avid® | 5,9 ~ 7,8 Нм | 52 ~ 69 дюймов фунт |
| Cane Creek® | 6,3 ~ 6,7 Нм | 56 ~ 60 дюймов фунт | |
| Campagnolo® | 8 Нм | 71 дюйм фунтов | |
| Mavic® | 7 ~ 9 Нм | 62 ~ 80 фунтов | |
| Shimano® | 5 ~ 7 Нм | 43 ~ 61 дюйм фунт | |
| SRAM® | 5. 7 ~ 7,9 Нм 7 ~ 7,9 Нм | 50 ~ 70 дюймов фунт | |
| Колодки тормозные (гладкая шпилька) | Shimano® | 7,9 ~ 8,8 Нм | 70 ~ 78 фунтов |
| Колодки тормозные (с боковым тяговым усилием, двойным шарниром) | Cane Creek® | 6,3 ~ 6,7 Нм | 56 ~ 60 дюймов фунт |
| Shimano® | 6 ~ 8 Нм | 52 ~ 69 дюймов фунт | |
| Стяжной болт троса (консольный, линейный / вертикальный тормоз) | Болт Avid® M6 | 5.9 ~ 7,8 Нм | 52 ~ 69 дюймов фунт |
| ControlTech® | 4,5 ~ 6,8 Нм | 40 ~ 60 дюймов фунт | |
| Shimano® | 6 ~ 7,8 Нм | 53 ~ 69 фунтов | |
| Болт Shimano® M6 | 5,6 ~ 8,5 Нм | 50 ~ 75 дюймов фунт | |
| SRAM® | 5,6 ~ 7,9 Нм | 50 ~ 70 дюймов фунт | |
| Стяжной болт троса (боковая тяга, двойной шарнир) | Cane Creek® | 7,7 ~ 8. 1 Нм 1 Нм | 68 ~ 72 дюймов фунт |
| Campagnolo® | 5 Нм | 44 дюйма фунтов | |
| Mavic® | 7 ~ 9 Нм | 62 ~ 80 фунтов | |
| Shimano® | 6 ~ 8 Нм | 52 ~ 69 дюймов фунт | |
| Болт крепления суппорта (консольного, линейного тягового / клинового тормоза) | Avid® | 4,9 ~ 6,9 Нм | 43 ~ 61 дюйм фунт |
| ControlTech® | 11,3 ~ 13,6 Нм | 100 ~ 120 фунтов на | |
| Shimano® | 8 ~ 10 Нм | 69 ~ 87 дюймов фунт | |
| SRAM® | 5.7 ~ 7,9 Нм | 50 ~ 70 дюймов фунт | |
| Болт крепления суппорта (боковой, двойной, центральный) | Cane Creek® | 7,7 ~ 8,1 Нм | 68 ~ 72 дюйма фунтов |
| Shimano® | 7,84 ~ 9,8 Нм | 70 ~ 86 дюймов фунтов | |
| Кантилеверный двухрядный трос (резьба M5) | ControlTech® | 7,7 ~ 8,1 Нм | 40 ~ 60 дюймов фунт |
| Shimano® | 3,9 ~ 4,9 Нм | 35 ~ 43 дюймов фунт |
Характеристики крутящего момента — Fix It Sticks
Следующие характеристики крутящего момента были получены различными способами и в меру наших возможностей.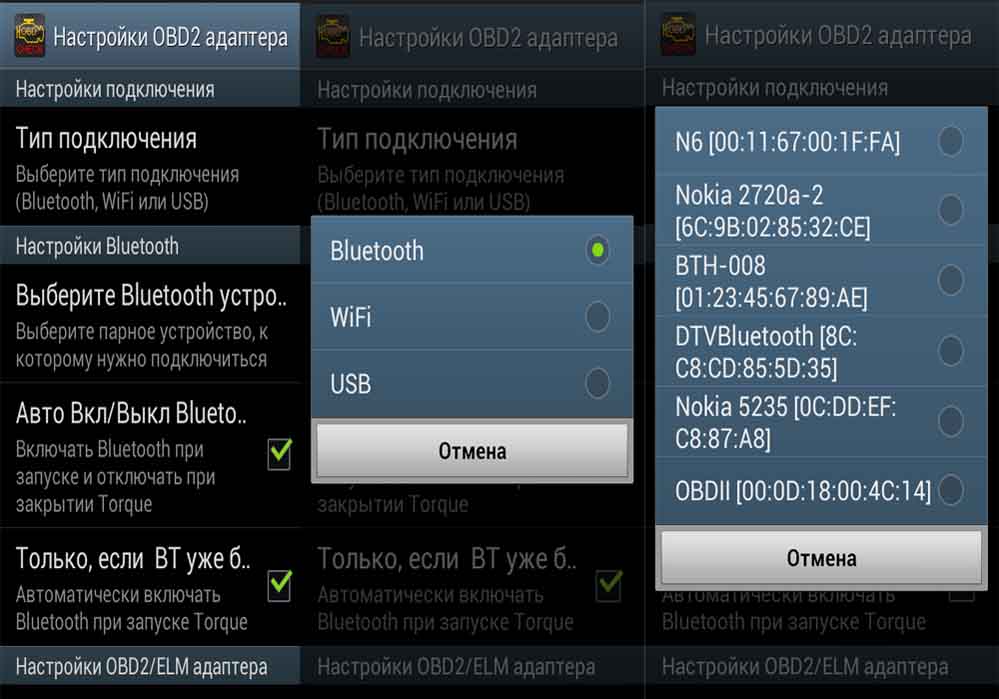 Мы не гарантируем, что они верны или что производитель не изменил их.
Мы не гарантируем, что они верны или что производитель не изменил их.
Если вы считаете, что какая-либо информация неверна или у вас есть некоторые значения, которые вы хотели бы добавить, сообщите нам об этом по адресу [email protected], и мы внесем изменения.
Спасибо.
МЕЖДУНАРОДНАЯ ТОЧНОСТЬ
AI Моноблочные крепления для прицелов
- Винты с головкой под ключ: 18 дюймов на фунт
- Зажимные винты для крепления прицела: 31 дюйм-фунт
AT / AX AICS
- Стопорные винты: 53 дюйма на фунт
- Принадлежности для пазов для ключей: 35 дюймов на фунт
- Крепежные винты M3 и M3 со стороны запаса: 7 дюймов на фунт
Винтовки AT / AX
- Винты стыковой подушки: 3.5 Нм (31 дюйм-фунт)
- Зажимной винт ствола: 5,5 Нм (49 дюймов на фунт)
- Стопорные винты цевья: 5,5 Нм (49 дюймов на фунт)
Прицел
Acro C-1 / P-1
- Монтажный винт: 25 дюймов на фунт
Micro h2 / h3
- Монтажный винт: 18 дюймов на фунт
Micro S1
- Крепежные винты: 8 дюймов на фунт
Микро Т-1 / Т-2
- Монтажный винт: 18 дюймов на фунт
Крепление Micro для ласточкин хвост
- Крепежные винты для h3: 12 дюймов на фунт
- Крепежные винты для h2: 7 дюймов на фунт
Micro Tikka T3
- Крепежные винты: 11. 5 дюйм-фунтов
 5 дюйм-фунтов
5 дюйм-фунтовАМЕРИКАНСКАЯ СТРЕЛКОВАЯ КОМПАНИЯ
Кольца для оптических прицелов M10
- Винты зажима осциллографа: 50-55 дюймов на фунт
- Винты зажима направляющей: 50-55 дюймов на фунт
M10 QD-L Крепление для прицела
- Винты зажима осциллографа: 50 дюймов на фунт
- Винты с накатанной головкой рельсового зажима: затяжка пальцами
Mausingfield Action
- Винты крепления направляющей к приемнику: 45 дюймов на фунт
Барлок
- Зажимной винт: 90 дюйм-фунтов
BADGER ORDNANCE
Крепления для прицелов
- Кольцевые винты: 15-18 дюйм-фунтов
- Поперечные болты: 65 дюймов на фунт
БАРРЕТ
MRAD
- Стопорные винты ствола: 140 дюйм-фунтов
- Принадлежности для рельсов: 25 дюймов на фунт
Fieldcraft
- Передний болт: 80 дюйм-фунтов
- Болт заднего хода: 36 дюймов на фунт
БЕРГАРА
Винтовки серии Premier и Custom
- Движущиеся винты: постепенно затягивать до 55 дюймов на фунт
Винтовка B14 серии
- Стандартные винты: 7 Нм (62 фунт-дюйма)
DESERT TECH
Крепление для прицела DT
- Базовые винты: 80 дюйм-фунтов
- Винты с кольцом: 15 дюймов на фунт
HTI
- Удерживающие винты ствола: 80 дюйм-фунтов
- Винты для стандартной панели: 24 дюйма на фунт
- Винт положения спускового крючка: 24 дюйма на фунт
- Крепежные винты спускового крючка: 24 дюйма на фунт
- Винт строповочной шпильки: 24 фунта-дюйма
- Винт для щеки: 24 дюйма на фунт
- Винты для сегментов рельса: 8 дюймов на фунт
SRS
- Удерживающие винты ствола: 80 дюйм-фунтов
- Винты для стандартной панели: 8 дюймов на фунт
- Спусковой винт: 24 дюйма на фунт
- Крепежные винты спускового крючка: 24 дюйма на фунт
- Винт строповочной шпильки: 24 фунта-дюйма
- Винт для щеки: 24 дюйма на фунт
- Винты для сегментов рельса: 8 дюймов на фунт
MDR
- Удерживающие винты ствола: 80 дюйм-фунтов
- Винты цевья: 30 дюйм-фунтов
- Крепление DTRO: 30 дюймов на фунт
EOTECH
512/552
XPS2 / XPS3
GEISSELE AUTOMATICS
Super Precision® — Крепления для прицелов AR15 / M4
- Кольцевые винты: 15-18 дюйм-фунтов
- Поперечные болты: не более 70 дюймов на фунт
GLOCK
- Винт мушки: 6 дюймов на фунт
HAWKINS PRECISION
Кольца для сверхлегких тактических прицелов
- Кольцевые винты: 25 дюйм-фунтов
- Поперечные болты: 65 дюймов на фунт
ТОЧНОСТЬ H-S
Винтовки и ложи
- Винты с механизмом: 65 дюймов на фунт
J ALLEN ENTERPRISES
JAE 700/700 XL
- Винты с механизмом: 65 дюймов на фунт
JP ПРЕДПРИЯТИЯ
Шасси APAC
- Регулируемые винты: передний 45 дюймов / фунт, задний 30 дюймов-фунт
- Винты защиты руки: 32 дюйм-фунта
- Винты регулировочной пластины приклада: 32 дюйма на фунт
KAHLES
- Кольцевые винты: 21 дюйм-фунт (макс. )
- Винты с нулевым упором: 8 дюймов на фунт
- Винты револьверной головки: 8 дюймов на фунт
 )
)КИНЕТИЧЕСКАЯ ИССЛЕДОВАТЕЛЬСКАЯ ГРУППА (KRG)
Шасси Whiskey-3 (поколение 6)
- Винты с механизмом: 65 дюймов на фунт
Шасси Bravo
- Винты с механизмом: 65 дюймов на фунт
- Винт, расположенный за ходовыми винтами: 45 дюймов на фунт (после затяжки эксцентриковых винтов)
Рентгеновское шасси (поколение 3)
- Винты с механизмом: 65 дюймов на фунт
Рентгеновское шасси (поколение 2)
- Винты с механизмом: 35-50 дюйм-фунтов
180 Рентгеновское шасси
- Винты с механизмом: 65 дюймов на фунт
(включая Mark 2, Mark 4, Mark 6, Mark 8)
- Кольцевые винты: 25 дюйм-фунтов
- Поперечные болты: 65 дюймов на фунт
Крепления для охоты
- Кольцевые винты: 25 дюйм-фунтов
- Базовые винты: 45 дюймов на фунт
МАНЕРЫ
Для винтов / затворов Remington
- Регулируемые винты: 65 дюймов на фунт спереди / 45 дюймов на фунт сзади
МАГПУЛ
PRO 700 Шасси для винтовки
- Винты с механизмом: 55-60 дюймов на фунт
- Зажимной винт (для регулировки вылета спускового крючка): 35 дюймов на фунт
- Стопорные винты стыковой подушки: затягиваются вручную с усилием 10 дюймов на фунт
ШЕДЕВР
BA Система шасси
- Приводные винты: Последовательность следующая: передний — 25 дюймов на фунт, затем задний — 25 дюйм-фунт, затем передний — 65 дюйм-фунт, затем задний — 65 дюйм-фунт
МАКМИЛЛАН США
Все стандартные модели
- Винты с механизмом: 40-45 дюйм-фунтов
ПРИНАДЛЕЖНОСТИ M-LOK
- Полимер по металлу: 15 дюймов на фунт
- Полимер в полимер: 15 дюймов на фунт
- Металл по металлу: 35 дюймов на фунт
ТЕХНОЛОГИИ С МОДУЛЬНЫМ ПРИВОДОМ (MDT)
MDT Elite / Premier Кольца для прицелов
- Винты с головкой под ключ: 18-20 дюймов на фунт
- Винты с кольцевым основанием: 25-30 дюймов на фунт
База прицела MDT 20 MOA / База большого прицела MDT ESS
- Крепежные винты: 25 дюйм-фунтов
Шасси MDT ESS
- Винты с механизмом: 60 дюйм-фунтов
- Винты крепления цевья: 30 дюймов на фунт
MDT LSS-XL Gen2
- Винты с механизмом: 60 дюймов на фунт
Шасси MDT Tac21
- Винты с механизмом: 60 дюйм-фунтов
Шасси MDT LSS
- Винты с механизмом: 65 дюймов на фунт
- Выносные винты: 65 дюймов на фунт
Шасси MDT LSS-22
- Действия Винты: 30 дюйм-фунтов (отрегулируйте крутящий момент для повышения точности)
Шасси MDT ESS
- Винты с механизмом: 60 дюйм-фунтов
- Винты крепления цевья: 30 дюйм-фунтов
NIGHTFORCE
- Кольцевые винты: 25 дюйм-фунтов
- Поперечные болты: 68 дюйм-фунтов
- Крепежные винты для основания и прямого монтажа: 25 дюймов на фунт
- Винты нулевого упора: 4 фунта-дюйма
- Винты револьверной головки: 4 фунта на дюйм
Примечание: Поперечные болты на кольцах с шестью винтами 34 мм: 100 дюйм-фунтов
квартал
Исправление
- M1913 Винты направляющей для принадлежностей: 40 дюймов на фунт
- Длина регулировочного винта тяги: 35-40 дюймов на фунт
- Винт регулировки высоты гребня: 35-40 дюймов на фунт
- Гайка ствола: 40 фут-фунт (обратите внимание на фунт-фут)
- Поперечный болт ствола: 40 дюйм-фунтов
- Затяжной болт и поперечный болт цевья: 40 дюймов на фунт
- Винты верхней направляющей: 40 дюймов на фунт (начните сзади и двигайтесь к передней части цевья)
РЕМИНГТОН
700
- Винт переднего действия: 55-60 дюймов на фунт
- Винт среднего действия: 40-45 дюймов на фунт
- Винт заднего хода: 15-20 дюймов на фунт
РУГЕР
10/22
- Винты с V-образным блоком: 10-20 дюймов на фунт
- Приводной винт: 15-20 дюймов на фунт (большинство людей предпочитают 20)
RPR
- Гайка ствола: 35-50 фут-фунтов (обратите внимание на фунт-фут)
- Винты цевья: 25 дюйм-фунтов
Американская винтовка Ругер
- Регулируемые винты: 60-80 дюймов на фунт
SEEKINS PRECISION
SP15:
- Винт цевья NOXs: 25 дюймов на фунт
- Винты цевья SP3R и MCSR: 25 дюйм-фунтов
- Винт с захватом AR: 25 дюймов на фунт
SP10:
- Винт цевья: 25 дюйм-фунтов
- Винт с захватом AR: 25 дюймов на фунт
Havak:
- Установочный винт DBM: 20 дюймов на фунт
- Винты DBM: 55 дюймов на фунт
- Винты основания осциллографа: 25 дюймов на фунт
Разное:
- Кольца для оптических прицелов 30-35 мм: 20 дюймов на фунт (крышка) 50-55 дюймов на фунт (зажим)
- I-дюймовые кольца для осциллографа: 20 дюймов на фунт (крышка) 50-55 дюймов на фунт (зажим)
SIG SAUER
ROMEO ноль:
- Монтажный винт: 9 дюймов на фунт
SPUHR
- Кольцевые винты: 25 дюйм-фунтов
- Базовые винты: 45 дюймов на фунт
- Дополнительные винты: 25 дюймов на фунт
SWAROVSKI
ТАЛИЯ ПРОИЗВОДСТВО
Легкие кольца:
- Кольцевые винты: 17-20 дюймов на фунт
- Базовые винты: 22-25 дюймов на фунт
Стальные фиксированные кольца:
- Верхний винт: 20 дюймов на фунт
- Нижний винт: 30 дюймов на фунт
Кольца Пикатинни:
- Кольцевые винты: 20 дюйм-фунтов
- Поперечные болты: 65 дюймов на фунт
TRIJICON
RMR:
- Монтажный винт: 12 дюймов на фунт
ВИХРЬ
- Кольцевые винты: 18 дюймов на фунт
- Винты зажима основания: 45-50 дюймов на фунт
- Винты с нулевым упором: 8 дюймов на фунт
- Винты револьверной головки: 8 дюймов на фунт
Sparc Solar
XLR ИНДУСТРИИ
Element, Evolution, Evolution HD, Evolution BMG Шасси:
- Винты с механизмом: 65 дюймов на фунт
- Установочный винт буферной трубки: 10 дюйм-фунтов
- Зажимной винт: 45 дюймов на фунт
- Винты с головкой под ключ: 35 дюйм-фунтов
- Защита спускового крючка: 25 дюймов на фунт
Шасси из карбона:
- Винты с механизмом: 65 дюймов на фунт
- Установочный винт буферной трубки: 10 дюйм-фунтов
- Зажимной винт: 45 дюймов на фунт
- Винты с головкой под ключ: 35 дюйм-фунтов
- Нижние болты цевья: 35 дюйм-фунтов
- Защита спускового крючка: 25 дюймов на фунт
Envy Шасси:
- Винты с механизмом: 65 дюймов на фунт
- Установочный винт буферной трубки: 10 дюйм-фунтов
- Зажимной винт: 45 дюймов на фунт
Кольца для осциллографа XLR
- Кольцевые винты: 25 дюйм-фунтов
- Боковая пластина: 45 дюймов на фунт
ZRODelta
Крепление для оптического прицела DLOC-M4 и DLOC-M2
- Кольцевые винты: 14 дюйм-фунтов
- Боковая ручка: 44 дюйма на фунт
