Системы управления автомобиля — органы управления автомобилем
Современные автомобили отличаются легкостью в управлении. Развитие экономики и строгое следование ее основным принципам привели к тому, что автопроизводители сделали управление автомобилем простым и интуитивно понятным. Это касается как удобства расположения органов управления, так и усилий, прикладываемых к ним. Кроме этого автомобиль может быть оборудован множеством различных дополнительных систем.
Органы управления автомобилем
Рулевое колесо — наиболее часто используемый во время движения орган управления автомобилем. Воздействие на рулевое колесо позволяет поворачивать управляемые колеса автомобиля в требуемую сторону. На рулевом колесе могут быть расположены кнопки для управления аудиосистемой, системой круиз-контроля и другими.
Подрулевые переключатели. Многофункциональные подрулевые переключатели предназначены для управления наружным освещением, указателями поворота, стеклоочистителями и стеклоомывателями.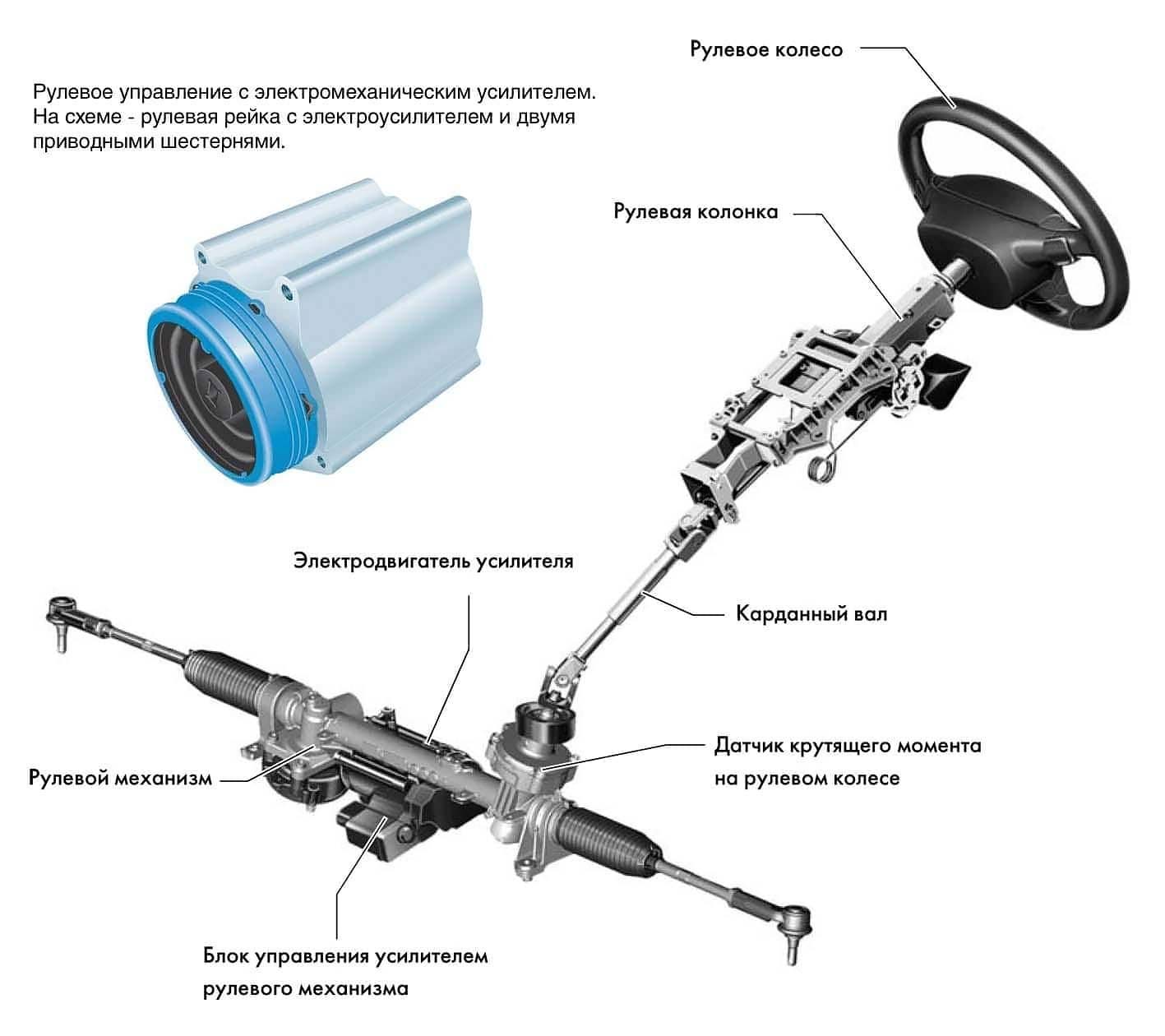
Щиток приборов. Щиток приборов является основным источником информации о состоянии систем автомобиля и текущем режиме движения.
Самым главным прибором в щитке является спидометр. Этот прибор сообщает водителю текущую скорость движения. Что бы ни случилось, в любой ситуации наши специалисты по выездной тех помощи на дорогах москвы приедут и окажут необходимую помощь.
Рядом со спидометром обычно расположены еще два очень важных прибора — указатель температуры охлаждающей жидкости и указатель уровня топлива в баке. Из следующей главы можно будет узнать обзор основных типов двигателей: бензиновый, дизельный, газовый, электрический, гибридный (гибридная установка).
На многих автомобилях установлен тахометр. Этот прибор показывает текущую частоту вращения коленчатого вала двигателя.
Раньше тахометр имел важное значение для предохранения двигателя от превышения предельно допустимой частоты вращения, но на двигателях с электронной системой управления это уже не актуально.
Выключатель (замок) зажигания. Выключатель зажигания является главным рубильником системы электрооборудования. На автомобилях с дизельным двигателем зажигания нет, и формально выключатель надо называть выключателем электрооборудования, но в быту это не прижилось.
Центральная консоль. На центральной консоли обычно размещены аудиосистема и блок управления климатической установкой. Также на ней могут быть установлены информационный дисплей и всевозможные выключатели.
Рычаг переключения передач. Служит для управления механической коробкой передач. Если автомобиль оборудован автоматической трансмиссией, его принято называть селектором АКП.
Селектор служит для выбора требуемого режима работы автоматической трансмиссии.
Педали. Служат для управления двигателем, трансмиссией и тормозами.
На панели приборов также расположены выключатели систем комфорта, которыми оснащен автомобиль. К ним относятся электростеклоподъемники, электроприводы зеркал заднего вида, подогрев сидений, обогрев заднего стекла и наружных зеркал (многие автомобили также оснащены электрообогревом ветрового стекла), электроприводы регулировки сидений и многие другие устройства. Эти системы управления автомобилем обычно являются опциональными при покупке автомобиля
В этой главе мы рассмотрели основные типы автомобилей и выяснили, из каких основных узлов и агрегатов они состоят. Теперь самое время разобраться, как это все работает. Начнем с двигателя.
Система автоматического управления транспортным средством
Область технического применения
[1] Настоящее изобретение относится к системе автоматического управления транспортным средством, в частности, к системе автоматического управления автомобилем, при которой водитель задает место назначения в системе навигации, а автомобиль переходит в режим автоматического управления до заданного места назначения с учетом сигналов светофоров, а также находящихся рядом транспортных средств и объектов.
Предшествующий уровень развития техники
[3] При введении водителем определенных параметров скорости движения стандартная система автоматического управления обеспечивает поддержание заданной скорости, пока водитель не начнет использовать педаль акселератора. Такая система автоматического управления обычно называется автоматическим управлением, автоматикой, круиз контролем и т.п.
[4] Вышеописанная система автоматического управления контролирует скорость движения автомобиля и расстояние до находящегося впереди другого автомобиля. Определяя данное расстояние, датчик управляет дроссельной заслонкой и тормозной системой при помощи бортового компьютера, обеспечивая безопасное управление за счет поддержания безопасного расстояния между автомобилями.
[5] При введении водителем определенных параметров скорости движения, на трассе с высокой разрешенной скоростью движения, управление автомобилем обеспечивается на заданной скорости. При этом водитель не использует педаль акселератора, что обеспечивает значительно меньшую утомляемость водителя.
[6] Как показано на Фигурах 1 и 2, зарегистрированный корейский патент номер 10-0180496 описывает технологию применения такой системы автоматического управления в качестве примера. Технические характеристики системы приведены ниже. Система автоматического управления позволяет водителю управлять автомобилем на заданной скорости с возможностью переключения на ручной или автоматический режим управления; система укомплектована устройством переключения с функцией выбора определенного автомобиля среди движущихся впереди автомобилей; система укомплектована устройством определения расстояния 4, служащим для определения дистанции до движущегося впереди автомобиля при помощи приемопередатчика, который определяет дистанцию до выбранного устройством переключения автомобиля; система укомплектована устройством настройки дистанции 6 для ввода параметров расстояния до выбранного устройством переключения автомобиля пропорционально скорости автомобиля; система укомплектована электронным модулем управления 8 для подачи сигнала ускорения или замедления с целью контроля безопасной дистанции до движущегося впереди автомобиля в соответствии с сигналом устройства определения расстояния 4 и сигналом устройства настройки дистанции 6; система укомплектована шаговым двигателем «М» для контроля безопасной дистанции до движущегося впереди автомобиля путем управления акселератором двигателя в соответствии с сигналом, подаваемым электронным модулем управления 8.
[7] Описанная в зарегистрированном корейском патенте номер 10-0180496 технология имеет преимущество, выраженное в возможности водителя управлять автомобилем на заданной скорости при сохранении безопасной дистанции до движущегося впереди автомобиля путем ускорения и замедления движения при одновременном снижении утомляемости водителя; тем не менее, доступен только контроль скорости движения без возможности рулевого управления автомобилем. Следовательно, водитель все равно осуществляет рулевое управление автомобилем, что приводит к его утомляемости.
Описание изобретения
[9] Соответственно, настоящее изобретение служит для разрешения вышеописанной проблемы. Объектом настоящего изобретения является система автоматического управления автомобилем, которая позволяет водителю задавать место назначения при помощи устройства навигации, после чего модуль маршрутизации, установленный в системе, получает информацию о маршруте, направлении и угле поворота согласно текущим данным измерений, формирует и определяет полосу движения, а модуль управления движением позволяет управлять акселератором, тормозной системой и системой рулевого управления в соответствии с полосой движения для автоматического движения автомобиля к заданному месту назначения.
[10] Другим объектом настоящего изобретения является комплектация системы автоматического управления автомобилем модулем управления движения, использующим данные автоматического управления автомобилем для обеспечения точного расположения каждого колеса и угла поворота колес при помощи рулевой системы управления с учетом размера колес, чтобы автомобиль точно двигался по заданной полосе движения согласно модулю маршрутизации.
[11] Следующим объектом настоящего изобретения является комплектация системы автоматического управления автомобилем модулем безопасности движения с беспроводным приемником для получения в режиме реального времени сигналов каждого светофора и определения их значения для обеспечения движения автомобиля в соответствии с сигналами и безопасного управления автомобилем на перекрестке, пешеходном переходе и т.п.
[12] Следующим объектом настоящего изобретения является комплектация системы автоматического управления автомобилем модулем маршрутизации, с возможностью его настройки и внесения данных о ширине и количестве полос движения, а также определения основной полосы движения, по которой будет двигаться управляемый автомобиль, и дополнительной полосы движения с возможностью беспрепятственного перехода на другую полосу и обратно.
[13] Еще одним объектом настоящего изобретения является комплектация автоматической системы управления автомобилем модулем определения положения, служащим для точного определения полосы движения с целью обеспечения максимальной точности управления автомобилем. Данные о полосе движения, по которой двигался автомобиль, и изображение, зафиксированное камерой, сохраняются в архиве данных. Если автомобиль в другое время опять движется по той же полосе движения, сохраненные данные сравниваются с текущим изображением для обеспечения максимальной точности управления автомобилем.
[16] Для решения вышеописанных задач автоматическая система управления автомобилем должна быть укомплектована, в частности, но без ограничений, модулем маршрутизации, который получает информацию о маршруте, заданную в установленном устройстве навигации, и преобразует данные о расстоянии, направлении и угле поворота согласно текущим данным измерения и направляет на определенную полосу движения, а также модулем управления движением, который обеспечивает возможность управления автомобилем, двигающимся по полосе движения, заданной модулем маршрутизации.
[17] Модуль управления движением конфигурируется так, чтобы сохранять данные о положении каждого колеса автомобиля, угле поворота каждого колеса при применении системы рулевого управления, и диаметре каждого колеса.
[18] Модуль управления движением конфигурируется для управления двигателем, тормозной системой и системой рулевого управления в соответствии с данными управляемого автомобиля, двигающегося по полосе движения при помощи установленного на автомобиле ECU (Электронного Блока Управления).
[19] Предусмотрен модуль корректировки ошибок, служащий для корректировки полосы движения, с учетом текущего положения автомобиля, данные о котором получены от устройства навигации при сравнении текущего положения автомобиля с положением на полосе движения.
[20] Предусмотрен модуль безопасности движения, служащий для предотвращения любых внештатных ситуаций, с функцией определения находящихся рядом автомобилей и предметов при помощи датчиков определения расстояния, установленных спереди, сзади и по бокам автомобиля.
[21] Модуль безопасности движения укомплектован беспроводным приемником, получающим данные о светофорах от беспроводных передатчиков, установленных на светофорах, расположенных на перекрестках и пешеходных переходах.
[22] При введении данных о полосе движения модуль маршрутизации одновременно получает данные о перекрестках, пешеходных переходах, туннелях, светофорах, ограничениях скорости на дорогах и индивидуальной частоте передачи данных каждого светофора.
[23] Модуль маршрутизации конфигурируется для сохранения информации о ширине и количестве полос движения каждой дороги, по которой двигается управляемый автомобиль, и определения основной полосы движения, по которой будет двигаться управляемый автомобиль, и дополнительной полосы движения с возможностью беспрепятственного перехода на другую полосу и обратно.
[24] Дополнительно предусмотрен модуль контроля полосы движения, служащий для определения полосы движения, от которой не должен отклоняться автомобиль.
[25] Модуль контроля полосы движения может включать в себя, но не ограничиваться им, модуль обработки изображения, который служит для обработки изображений, передаваемых камерой, установленной в передней части транспортного средства, а также модуль определения полосы движения, который служит для определения каждой полосы движения путем анализа и обработки образца (модели) каждой полосы движения, изображение которой обработано модулем обработки изображения.
[26] В дополнение, модуль контроля полосы движения может включать в себя, но не ограничиваться им, модуль обработки изображения, который служит для обработки изображений, получаемых с камеры, установленной в передней части транспортного средства, а также модуль определения полосы движения, который служит для определения каждой полосы движения путем анализа образца соответствующей полосы движения по изображению, которое обработано модулем обработки изображения.
[27] Дополнительно предусмотрен модуль определения положения, служащий для определения положения автомобиля, который позволяет определять полосу движения на дороге на основании данных, полученных при помощи модуля обработки изображения и модуля определения полосы движения.
[28] Кроме того, модуль определения положения, служащий для определения положения автомобиля, может быть укомплектован первым приемопередатчиком, служащим для передачи и получения высокочастотного сигнала. На каждой стороне дороги предусмотрена установка второго приемопередатчика для получения сигнала от первого приемопередатчика и передачи сигналов при помощи расположенных на расстоянии друг от друга устройств второго приемопередатчика. Модуль определения положения определяет полосу движения, на которой находится двигающийся по дороге автомобиль, используя данные о расстоянии между обочинами дороги и данные о ширине полосы движения, на основании сигналов, полученных от первого и второго приемопередатчиков.
[29] Предусмотрен модуль определения состояния дороги, служащий для определения состояния поверхности дороги. Данный модуль определяет возможное наличие трещин и выбоин на поверхности дороги, анализируя изображение, полученное камерой, установленной в транспортном средстве.
[30] Дополнительно предусмотрен модуль архивирования данных о полосе движения, который служит для хранения данных о полосе движения, по которой двигался автомобиль, и изображений, полученных камерой, установленной в транспортном средстве. Полученное изображение сравнивается с положением полосы движения.
[31] При этом если автомобиль двигается по дороге, по которой передвигался ранее, то при управлении автомобилем соответствующее изображение, сохраненное в модуле архивирования данных, сравнивается с текущим изображением, получаемым от камеры.
[32] Беспроводной приемник получает географические данные о местах стоянки автотранспорта от беспроводных приемопередатчиков, установленных на местах стоянки автотранспорта, а также о месте парковки автомобиля, а модуль маршрутизации формирует подробные данные о полосе движения для движения и парковки автомобиля на месте стоянки, с учетом текущего положения автомобиля.
[33] Модуль определения положения служит для определения положения автомобиля. Он укомплектован первым приемопередатчиком для приема и передачи высокочастотного сигнала. На краю места стоянки автотранспорта установлен третий приемопередатчик для получения сигнала от первого приемопередатчика и передачи сигнала. Модуль определения положения определяет положение автомобиля по крайнему сектору места стоянки при помощи сигналов, полученных от первого и третьего приемопередатчиков, с учетом географических данных места стоянки автомобилей.
Он укомплектован первым приемопередатчиком для приема и передачи высокочастотного сигнала. На краю места стоянки автотранспорта установлен третий приемопередатчик для получения сигнала от первого приемопередатчика и передачи сигнала. Модуль определения положения определяет положение автомобиля по крайнему сектору места стоянки при помощи сигналов, полученных от первого и третьего приемопередатчиков, с учетом географических данных места стоянки автомобилей.
[34] При определении текущего сигнала, изображение светофора выделяется из общего изображения, получаемого установленной на автомобиле камерой, и сравнивается с образцом изображения светофоров, сохраненным в модуле управления движением.
Преимущества системы
[36] В соответствии с настоящим изобретением, водитель задает место назначения при помощи устройства навигации, и встроенный в систему модуль навигации прокладывает маршрут с учетом текущих данных управляемого автомобиля, определяя и формируя полосу для движения. Модуль управления движением позволяет управлять движением автомобиля по данной полосе движения за счет управления акселератором, тормозной системой и системой рулевого управления автомобиля. Движением автомобиля можно управлять в автоматическом режиме до места назначения.
Модуль управления движением позволяет управлять движением автомобиля по данной полосе движения за счет управления акселератором, тормозной системой и системой рулевого управления автомобиля. Движением автомобиля можно управлять в автоматическом режиме до места назначения.
[37] Модуль управления движением, установленный в системе автоматического управления, которая является предметом настоящего изобретения, может хранить информацию об угле поворота каждого колеса в системе рулевого управления и размере каждого колеса, для обеспечения точности управления движением автомобиля по полосе движения, определенной модулем маршрутизации.
[38] В соответствии с настоящим изобретением, модуль безопасности движения укомплектован беспроводным приемником, получающим сигнал от каждого светофора в режиме реального времени, для обеспечения движения автомобиля в соответствии с сигналами и для безопасного проезда перекрестков и пешеходных переходов.
[39] При настройке модуля маршрутизации задаются данные о ширине и количестве полос движения на дороге, по которой будет двигаться автомобиль, для определения основной полосы движения, по которой будет двигаться управляемый автомобиль, и дополнительной полосы движения с возможностью беспрепятственного перехода на нее и обратно.
[40] В соответствии с настоящим изобретением, система автоматического управления укомплектована модулем определения положения, который точно определяет полосу движения, на которой находится автомобиль, с целью обеспечения точности управления автомобилем. Устройство архивирования данных о полосе движения служит для хранения данных о полосах движения, по которым двигался автомобиль, и изображений, полученных камерой. При повторном движении автомобиля по полосе движения, архивированные данные и текущие изображения сравниваются для обеспечения более точного управления автомобилем.
Краткое описание чертежей
[42] Фигура 1: блок-схема стандартной системы автоматического управления автомобилем.
[43] Фигура 2: принципиальная схема стандартной системы автоматического управления автомобилем.
[44] Фигура 3: схематический чертеж автомобиля, система автоматического управления которого применяется согласно настоящему изобретению.
[45] Фигура 4: блок-схема стандартной системы автоматического управления автомобилем, применяемой согласно настоящему изобретению.
[46] Фигура 5: концептуальная схема системы светофоров, установленных на перекрестках, согласно настоящему изобретению.
[47] Фигура 6: концептуальная схема полосы движения, сформированной модулем маршрутизации системы автоматического управления автомобилем согласно настоящему изобретению.
[48] Фигура 7: блок-схема системы автоматического управления автомобилем в соответствии с другим примером применения согласно настоящему изобретению.
[49] Фигура 8: блок-схема системы автоматического управления автомобилем в соответствии с еще одним примером применения согласно настоящему изобретению.
[50] Фигура 9: концептуальная схема дороги согласно примеру, приведенному на Фигуре 8.
[51] Фигура 10: блок-схема системы автоматического управления автомобилем в соответствии с еще одним дополнительным примером применения согласно настоящему изобретению.
[52] Фигура 11: блок-схема системы автоматического управления автомобилем в соответствии с еще одним дополнительным примером применения согласно настоящему изобретению.
Основные примеры применения изобретения
[54] Примеры применения настоящего изобретения приводятся в сопровождении соответствующих чертежей. Одинаковые компоненты, приведенные на чертежах, имеют одинаковые номера позиций. Повторяющиеся описания не включены. Необходимо понимать, что настоящее изобретение может применяться в различных аспектах и не ограничивается приведенными описаниями.
[56] На Фигуре 3 приведен схематический чертеж автомобиля, система автоматического управления которого применяется согласно настоящему изобретению. Фигура 4 представляет собой блок-схему стандартной системы автоматического управления автомобилем, применяемой согласно настоящему изобретению. На Фигуре 5 приведена концептуальная схема системы светофоров, установленных на перекрестке согласно настоящему изобретению. Фигура 6 представляет собой концептуальную схему полосы движения, сформированной модулем маршрутизации системы автоматического управления автомобилем согласно настоящему изобретению. На Фигуре 7 приведена блок-схема системы автоматического управления автомобилем в соответствии с другим примером применения согласно настоящему изобретению. На Фигуре 8 приведена блок-схема системы автоматического управления автомобилем в соответствии с еще одним примером применения согласно настоящему изобретению. Фигура 9 представляет собой концептуальную схему дороги согласно примеру, приведенному на Фигуре 8. Фигура 10 представляет собой блок-схему системы автоматического управления автомобилем в соответствии с еще одним дополнительным примером применения согласно настоящему изобретению. Фигура 11 представляет собой блок-схему системы автоматического управления автомобилем в соответствии с еще одним дополнительным примером применения согласно настоящему изобретению.
Фигура 6 представляет собой концептуальную схему полосы движения, сформированной модулем маршрутизации системы автоматического управления автомобилем согласно настоящему изобретению. На Фигуре 7 приведена блок-схема системы автоматического управления автомобилем в соответствии с другим примером применения согласно настоящему изобретению. На Фигуре 8 приведена блок-схема системы автоматического управления автомобилем в соответствии с еще одним примером применения согласно настоящему изобретению. Фигура 9 представляет собой концептуальную схему дороги согласно примеру, приведенному на Фигуре 8. Фигура 10 представляет собой блок-схему системы автоматического управления автомобилем в соответствии с еще одним дополнительным примером применения согласно настоящему изобретению. Фигура 11 представляет собой блок-схему системы автоматического управления автомобилем в соответствии с еще одним дополнительным примером применения согласно настоящему изобретению.
[58] Настоящее изобретение описывает систему автоматического управления, установленную на автомобиль, обеспечивающую автоматическое управление автомобилем при его движении к месту назначения. Как показано на Фигурах 3 и 4, она может быть укомплектована устройством автоматического управления 100, обеспечивающим контроль над автомобилем. Устройство автоматического управления 100 может быть укомплектовано, в частности, но не ограничиваясь им, модулем маршрутизации 110, модулем корректировки ошибок 120, модулем управления движением 130 и модулем безопасности движения 140.
Как показано на Фигурах 3 и 4, она может быть укомплектована устройством автоматического управления 100, обеспечивающим контроль над автомобилем. Устройство автоматического управления 100 может быть укомплектовано, в частности, но не ограничиваясь им, модулем маршрутизации 110, модулем корректировки ошибок 120, модулем управления движением 130 и модулем безопасности движения 140.
[59] Модуль маршрутизации 110 конфигурируется путем введения данных от текущего положения автомобиля до места назначения, которые пользователь задает при помощи устройства навигации 200, установленного на автомобиле, для формирования полосы движения, по которой будет двигаться автомобиль. Полоса движения определяется на основании данных о расстоянии, направлении и угле поворота согласно текущим данным измерения.
[60] Модуль управления движением 130 конфигурируется для управления движением автомобиля по полосе движения, сформированной модулем маршрутизации 110. Модуль управления движением 130 управляет двигателем 132, тормозной системой 133 и системой рулевого управления 134 при помощи ECU (Электронного Блока Управления) 131, установленного в автомобиле.
[61] Кроме того, модуль управления движением 130 сконфигурирован с возможностью сохранения данных о положении каждого колеса автомобиля, угле поворота каждого колеса при применении системы рулевого управления 134 и диаметре каждого колеса. При движении автомобиля по определенной для него полосе движения управление производится с учетом известных данных об автомобиле.
[62] При управлении автомобилем, двигающимся по извилистой дороге, система рулевого управления 134 обеспечивает поворот автомобиля в соответствии с полосой движения. При осуществлении поворота рулевой системой управления 134 передние колеса автомобиля поворачиваются под определенным углом. Так как передние и задние колеса автомобиля находятся на расстоянии друг от друга, радиус поворота изменяется в зависимости от этого расстояния. Данное изменение рассчитывается, а рулевая система управления контролируется так, чтобы поворот передних колес соответствовал радиусу поворота полосы движения.
[63] При управлении системой рулевого управления 134 поворот контролируется двигателем (не показан на чертежах), который устанавливается в системе рулевого управления 134. Двигатель (не показан на чертежах) укомплектован кодирующим устройством (не показано на чертежах), которое позволяет ECU 131 определять угол поворота для двигателя (не показан на чертежах). Угол поворота системы рулевого управления 134 точно контролируется путем точного управления вращением двигателя (не показан на чертежах) при помощи ECU (Электронного Блока Управления) 131.
[64] Датчик определения поворота 135 установлен на узле крепления колеса на автомобиль. Модуль управления движением 130 рассчитывает окружность колеса с учетом его диаметра и умножает полученное значение на значение оборотов вращения колеса, определенное датчиком определения вращения 135, получая, таким образом, значение расстояния, на котором колесо подлежит управлению в данный момент.
[65] С этой целью, можно определить текущее положение автомобиля на полосе движения, сформированной модулем маршрутизации 110.
[66] При определении полосы движения модулем маршрутизации 110 задаются данные перекрестков, пешеходных переходов, туннелей, светофоров и ограничений скорости на дороге. Модуль управления движением 130 умножает значение окружности колеса на значение вращения за единицу времени, определенную датчиком определения вращения 135, получая, таким образом, значение скорости автомобиля. Скорость автомобиля повышается и снижается при помощи двигателя 132, установленного на автомобиле, с учетом регулировки скорости движения по текущей дороге на основании рассчитанного значения.
[67] При необходимости срочного снижения скорости автомобиля применяется торможение при помощи управляемой тормозной системы 133 в аварийной ситуации.
[68] При управлении автомобиля на заданном расстоянии система автоматического управления 100 контролирует движение автомобиля, но определенная ошибка неизбежно возникает, даже при максимально точном управлении. Для корректировки данных ошибок используется модуль корректировки ошибок 120.
[69] Модуль корректировки ошибок 120 конфигурируется для получения данных о текущем положении автомобиля в режиме реального времени от устройства навигации 200, и его положение на полосе движения автоматически контролируется модулем управления движением 130 путем сравнения данных о текущем положении автомобиля, полученных от устройства навигации 200. Если ошибка выходит за пределы допустимой погрешности, модуль корректировки ошибок 120 корректирует полосу движения с учетом текущего положения автомобиля, данные о котором получены от устройства навигации, корректируя, таким образом, ошибку.
[70] Таким образом, диапазон допустимой погрешности может задаваться водителем. Если задан слишком широкий диапазон допустимой погрешности, разница между текущим положением автомобиля и положением автомобиля для модуля управления движением 130 является значительной, что может привести к возникновению опасной ситуации. Если диапазон маленький, то возникает необходимость частой корректировки данных о полосе движения. В то время как полоса движения корректируется, функции остальных модулей ограничиваются после чего должен быть введен соответствующий диапазон допустимой погрешности для безопасного управления автомобилем.
[71] Модуль безопасности движения 140 позволяет управлять автомобилем без риска столкновения с другими автомобилями или объектами путем определения их местонахождения рядом с автомобилем.
[72] Датчики определения расстояния 142 устанавливаются спереди, сзади и по бокам автомобиля для определения местонахождения других автомобилей и объектов рядом с автомобилем и расстояния до них.
[73] Предпочтительнее устанавливать датчики определения расстояния 142 по диагонали, а не спереди, сзади и по бокам автомобиля, так как это позволяет более точно определять местонахождение других автомобилей и объектов в опасной близости от автомобиля, и обеспечивать безопасное управление автомобилем.
[74] Модуль безопасности движения 140 может быть укомплектован беспроводным приемником 144. Как показано на Фигуре 5, беспроводной приемник 144 конфигурируется для получения данных светофоров, передаваемых беспроводными передатчиками 310, установленными на светофорах 300, находящихся на перекрестках и пешеходных переходах.
[75] Следовательно, модуль безопасности движения 140 может передавать полученный от светофора сигнал на модуль управления движением 130 при управлении движением автомобиля с учетом данных светофора, что позволяет автомобилю осуществлять движение в соответствии с сигналами светофоров.
[76] При формировании полосы движения вышеописанным способом задаются данные перекрестков, пешеходных переходов и светофоров. При сравнении заданного положения управляемого автомобиля с положением относительно светофора 300, модуль безопасности движения 140 получает данные о частоте светофора, на которой беспроводной передатчик 310, установленный на соответствующем светофоре 300, осуществляет передачу сигнала, соответственно, установленный на автомобиле беспроводной приемник 144 получает сигнал на определенной частоте, во избежание возникновения помех со стороны других передатчиков, установленных на расположенных рядом светофорах 300.
[77] На одном перекрестке может быть установлено определенное количество светофоров 300. Они синхронно меняют свои сигналы, при этом сигналы всех светофоров, установленных на одном перекрестке, передаются одним беспроводным передатчиком 310.
[78] При передаче в режиме реального времени установленным на каждой светофоре беспроводным передатчиком 300 сигнала каждого светофора на специальной определенной частоте, модуль безопасности движения 140 получает соответствующий сигнал на определенной частоте светофора 300, данные которой архивированы (сохранены) среди данных полосы движения, а получение сигнала возможно только от соответствующего светофора 300.
[79] С этой целью, модуль управления движением 130 в режиме реального времени определяет сигнал светофора 300, обеспечивая безопасное управление автомобилем в соответствии с полученным сигналом.
[80] Модуль маршрутизации 110 может архивировать подробную информацию о каждой дороге. После того, как задана полоса движения, задаются данные о ширине и количестве полос движения на каждой дороге (проезжей части), по которой будет перемещаться автомобиль.
[81] При формировании полосы движения модулем маршрутизации 110, как показано на Фигуре 6, основная полоса движения 510 позволяет автомобилю двигаться непосредственно по одной из существующих на дороге полос движения, а дополнительная полоса движения 520 — по другим заданным полосам движения.
[82] Следовательно, если при движении по основной полосе движения 510 она вдруг оказывается заблокированной, либо на ней находится какое-либо препятствие, в качестве основной полосы движения выбирается ближайшая полоса движения 520, что позволяет максимально безопасно и беспрепятственно выбрать полосу движения.
[83] При выборе полосы движения необходимо проверить наличие других автомобилей рядом с управляемым автомобилем при помощи модуля безопасности движения 140, и изменить полосу движения.
[84] Кроме того, система автоматического управления 100 может быть дополнительно укомплектована модулем контроля полосы движения 150, который позволяет контролировать полосу движения так, чтобы автомобиль не отклонялся от полосы движения, по которой он двигается. Модуль контроля полосы движения 150 может быть укомплектован модулем обработки изображения 152, служащим для обработки изображений, полученных установленной спереди автомобиля камерой 400, и конфигурируется для анализа изображений, обработанных модулем обработки изображения 152, определяя полосу движения путем проведения сравнения с образцами других полос движения (центральная полоса движения, полоса движения автомобиля, обочина и т.п.), обеспечивая правильность положения автомобиля на полосе движения.
[85] Таким образом, определенные данные передаются модулю управления движением 130, который управляет движением автомобиля с возможностью незамедлительного возврата автомобиля в прежнее положение, если он ошибочно переместился на другую полосу движения, во избежание аварийного столкновения.
[87] Как показано на Фигуре 7, в соответствии с другим примером применения настоящего изобретения, система автоматического управления 100 может быть укомплектована модулем определения положения 160, служащим для определения текущего положения автомобиля. Модуль определения положения 160 определяет текущее положение автомобиля путем распознавания полосы движения среди изображений, полученных камерой, установленной спереди автомобиля.
[88] Камеру 400 можно установить в любой точке автомобиля, но предпочтительнее установить ее в верхней части автомобиля, чтобы она получала изображения во всех направлениях дороги и эффективно функционировала в обоих направлениях по ходу движения автомобиля.
[89] Модуль обработки изображения 152, установленный в модуле контроля полосы движения 150, конфигурируется для обработки изображений, полученных камерой 400. Модуль определения полосы движения 154 сравнивает полученные изображения с данными предварительно сохраненной информации о полосах движения, определяя, таким образом, полосы движения.
[90] В то же время, модуль определения положения 160 точно определяет полосу движения, по которой двигается автомобиль, при помощи данных о полосах движения, расположенных слева и справа от автомобиля, определенных модулем контроля полосы движения 150.
[91] Так как возможно определение положения автомобиля с большой точностью на основании данных навигации и данных управления автомобилем, в частности, данных о положении автомобиля и точных данных о полосе движения, на которой определяется положение автомобиля, при помощи модуля определения положения 150, то возможно обеспечение точности в управлении автомобилем.
[92] Кроме того, если оставшаяся конфигурация совпадает с описанной ранее конфигурацией, ее описание опускается.
[94] Как показано на Фигурах 8 и 9, в соответствии с другим примером применения настоящего изобретения, автоматическая система управления 100 может быть укомплектована модулем определения положения 160, служащим для определения текущего положения автомобиля. Модуль определения положения 160 конфигурируется для измерения расстояния от текущего положения автомобиля до края дороги, определяя, таким образом, положение автомобиля.
[95] Модуль определения положения 160 может быть укомплектован первым приемопередатчиком 165 для передачи и получения высокочастотного сигнала, при установке второго приемопередатчика на обочине дороги, по которой двигается автомобиль, для получения высокочастотного сигнала от первого приемопередатчика 165 и передачи ему сигнала.
[96] При этом, модуль определения положения 160 конфигурируется для расчета времени возврата сигнала первого приемопередатчика 165, чтобы рассчитать расстояние до второго приемопередатчика 610. Каждый второй приемопередатчик 610 имеет индивидуальный регистрационный номер. Имея возможность распознать сигнал каждого второго приемопередатчика 610, можно рассчитать расстояние до него.
[97] С этой целью, производится точный расчет данных местонахождения обоих краев дороги и положения автомобиля. Полоса движения с текущим положением на ней автомобиля определяется с учетом ширины полосы движения, данные которой хранятся в модуле маршрутизации 110, что позволяет уверенно управлять движением автомобиля.
[98] Второй приемопередатчик 610 может быть установлен по центру дороги.
[99] Кроме того, если оставшаяся конфигурация совпадает с описанной ранее конфигурацией, ее описание опускается.
[101] В соответствии с еще одним объектом настоящего изобретения, как показано на Фигуре 10, система автоматического управления 100 может быть укомплектована модулем определения состояния дороги 170 для определения состояния поверхности дороги. Данный модуль конфигурируется (используется) для обработки изображений, полученных установленной на автомобиле камерой 400, и проверки наличия выбоин и трещин на поверхности дороги при сравнении с общим состоянием дороги, а также для определения их размеров, с целью изменения режима управления автомобилем, если они имеют значительные размеры.
[102] Если проверенный участок имеет выбоины и трещины значительных размеров, которые определяют изменение режима управления автомобилем, полоса движения изменяется, в противном случае, автомобиль продолжает движение по выбранной ранее полосе движения.
[103] При отсутствии соответствующих чертежей, модуль архивирования (сохранения) данных (не показан на чертежах) может быть установлен в системе автоматического управления 100 для хранения информации о полосе движения, по которой автомобиль двигался ранее, и для управления автомобилем с учетом архивированных данных, если в следующий раз автомобиль будет двигаться к тому же или расположенному рядом месту назначения, что обеспечит более надежное управление автомобилем.
[104] При архивировании данных о движении автомобиля изображения, полученные камерой 400, архивируются вместе с данными о полосе движения. При движении управляемого автомобиля по полосе движения, по которой он двигался ранее, он управляется с учетом ранее архивированных данных о полосе движения, при этом, производится сравнение архивированных изображений с изображениями, полученными при текущем движении, даже при движении автомобиля по узкой дороге.
[105] В это время установленная в верхней части автомобиля камера 400 конфигурируется для получения изображений в процессе движения автомобиля. При архивировании полученных изображений они сравниваются с изображениями, полученными при текущем положении автомобиля на полосе движения.
[106] Кроме того, при движении автомобиля по узкой дороге, в частности, где полосы движения не распознаются по полученным изображениям, обработанным модулем обработки изображения 152, часть маршрута выделяется из полученных изображений, и сохраняются данные об осевой линии (линии разграничения направления движения). При повторном движении автомобиля по этой же дороге автомобиль более эффективно управляется с учетом данных об осевой линии.
[107] Полученные камерой 400 изображения сравниваются с предварительно архивированными изображениями, с учетом определения отдельных объектов или людей, находящихся по направлению движения автомобиля, что позволяет избегать аварийных ситуаций.
[108] Если технология проведения сравнения изображений является известной, ее описание опускается. Если оставшаяся конфигурация совпадает с описанной ранее конфигурацией, ее описание опускается.
[110] В соответствии с Фигурой 11 и дополнительным примером применения настоящего изобретения модуль безопасности движения 140 системы автоматического управления 100 может быть укомплектован беспроводным приемником 144 для получения внешнего беспроводного сигнала. Беспроводной приемник 144 конфигурируется для получения данных о каждом месте стоянки 700 автотранспорта, передаваемых беспроводным приемопередатчиком 710.
[111] Каждое место стоянки 700 автотранспорта имеет специальный идентификационный номер, который содержится в передаваемом беспроводном сигнале. Передаваемая информация о месте стоянки 700 автотранспорта содержит подробные географические данные о каждом месте стоянки 700 автотранспорта и положении припаркованного автомобиля.
[112] Беспроводной приемник 144 получает географические данные и информацию о состоянии места стоянки из места стоянки 700 автотранспорта, данные о размере автомобиля, хранящиеся в модуле управления движением 130, и данные размера колес и угла поворота колес при управлении системой рулевого управления 134. Описанный в настоящем изобретении модуль маршрутизации 110 конфигурируется для выбора положения парковки автомобиля и формирования специальной полосы движения для движения автомобиля к месту парковки, куда автомобиль двигается для парковки под управлением модуля 130.
[113] В определенном месте каждого места стоянки 700 автотранспорта установлен третий приемопередатчик 620, который позволяет точно определять положение автомобиля на месте стоянки 700 автотранспорта при помощи первого приемопередатчика 165, установленного на автомобиле, что обеспечивает точность управления автомобилем.
[114] Третий приемопередатчик 620 должен быть установлен на краю или на углу места стоянки 700 автотранспорта, что позволит точно определять положение автомобиля на месте стоянки 700 автотранспорта.
[116] В соответствии с дополнительным примером применения настоящего изобретения камера 400, установленная на автомобиле, получает изображения перед автомобилем по ходу его движения. При движении автомобиля рядом с перекрестком модуль обработки изображения 152 может анализировать изображение светофора 300, находящегося по ходу движения, сравнивая с изображениями, полученными камерой 400, определяя, таким образом, текущий сигнал светофора.
[117] Модуль управления движением 130 может хранить данные различных образцов светофоров и их сигналов. Текущий сигнал светофора определяется путем сравнения образцов с изображением светофора, полученного модулем обработки изображения 152.
[119] В соответствии с дополнительным примером применения настоящего изобретения беспроводной приемник 144 модуля безопасности движения 140 может получать данные из общей коммуникационной сети. Если водитель, находящийся на значительном расстоянии, передает данные о месте назначения на коммуникационный терминал, в частности, на сетевой терминал (не показан на чертежах) или смартфон, беспроводной приемник 144 получает данные о месте назначения, а модуль управления движением 130 определяет это место и управляет движением автомобиля к месту назначения в автоматическом режиме.
[120] С этой целью, даже если водитель находится на расстоянии от автомобиля, то при необходимости, он задает данные о месте назначения на смартфоне или компьютере, затем автомобиль получает данные о месте назначения и может управляться и двигаться к месту назначения без водителя, после чего водитель может использовать его стандартным способом.
[121] В соответствии с дополнительным примером применения настоящего изобретения детекторный модуль (не показан на чертежах) может быть отдельно установлен внутри автомобиля. Таким образом, автомобиль сможет распознавать ключ или карточку RFID (Radio Frequency IDentification — радиочастотная идентификация) водителя. Если детекторный модуль автомобиля определяет соответствие данных заданным параметрам, автомобиль может издать определенный звуковой сигнал клаксона или через динамики музыкальной системы, а также осуществить мигание аварийных лампочек, что позволит водителю определить местоположение автомобиля и беспрепятственно его обнаружить.
[122] Если у водителя не ключа или карты RFID, камера 400 может получить его изображение, а модуль обработки изображения 152 — определить соответствие изображения данным зарегистрированного лица. При обнаружении соответствия водитель может пользоваться функционалом автомобиля, не имея ключа или карточки RFID.
[123] В соответствии с дополнительным примером применения настоящего изобретения модуль безопасности движения 140 может обеспечить комплектацию автомобиля отдельным беспроводным приемопередатчиком (не показан на чертежах), способным передавать данные о текущем местоположении автомобиля на находящийся рядом автомобиль при помощи беспроводного приемопередатчика (не показан на чертежах), а находящийся рядом автомобиль будет получать эти данные при помощи беспроводного приемника 144, установленного в модуле безопасности движения 140, с целью получения в режиме реального времени информации о находящихся рядом автомобилях.
[124] Можно получать информацию в режиме реального времени о том, полностью ли закрыты все двери автомобиля. Тогда при прохождении рядом с автомобилем с неплотно закрытой дверью человек сможет проявить максимальную осторожность во избежание возникновения аварийных ситуаций, связанных с непредвиденным открытием двери автомобиля.
[126] Так как настоящее изобретение может быть применено в различных формах, не влияя на основной смысл и характеристики изобретения, следует понимать, что вышеприведенные примеры не ограничиваются какими-либо деталями описания, если иное не указано, но соответствуют смыслу и целям изобретения, изложенным ниже в формуле изобретения, следовательно, все изменения и модификации, относящиеся к признакам, изложенным в формуле изобретения, либо эквивалентным признакам, находятся в рамках приведенной формулы изобретения.
Промышленное применение
[128] Настоящее изобретение описывает систему автоматического управления транспортным средством, в частности, автоматического управления автомобилем, когда водитель задает место назначения в навигационной системе, а автомобиль переходит в режим автоматического управления собственным движением до заданного места назначения с учетом сигналов светофоров, а также находящихся рядом автомобилей и объектов.
Nissan разработал новую интеллектуальную систему управления автомобилем
Японский концерн первым решился воплотить в жизнь давнюю мечту человека: управлять машиной силой мысли, и для этого разработал технологию B2V (Brain-to-Vehicle – «от мозга к автомобилю»), которую представил на выставке Consumer Electronics Show 2018 в Лас-Вегасе.
Эта технология позволяет «считывать» электронные сигналы мозга через систему датчиков, вмонтированных в специальный шлем на голове человека, расшифровывать их и предугадывать действия водителя, сокращая время реакции примерно на 0,5 секунды. Таким образом, автомобиль способен начать поворот, торможение или ускорение быстрее, чем сам человек начнет жать на педаль тормоза или газа.
При этом Nissan не ставит перед собой целью полностью изолировать человека от управления автомобилем. Напротив, главной целью проекта является создание такой системы, которая обеспечит максимальный контроль и комфорт при управлении машиной. В частности, уже сегодня технология B2V может определять температуру тела водителя и, при необходимости, включать кондиционер, обогрев сидений или изменять положение вентиляторов внутри салона, обеспечивая тем самым обогрев или охлаждение до комфортного уровня.
«Большинство людей, думая об автономном вождении, представляют себе довольно «безликое» будущее, где контроль над машиной полностью осуществляет сама машина, — сказал исполнительный вице-президент Nissan Даниэль Шиллачи (Daniele Schillaci). – Наша технология B2V предполагает прямо противоположное: создать максимальную связь между человеком и машиной, чтобы сделать вождение еще более приятным и захватывающим».
«Потенциальные возможности применения этой технологии просто невероятны, — утверждает доктор Лучиан Георге (Dr. Lucian Gheorghe), старший научный сотрудник научно-исследовательского центра Nissan в Японии, — В ближайшие годы это исследование станет катализатором дальнейших инновационных разработок Nissan для наших автомобилей»
Предприятие / 22.05.2019 | HELLA
Липпштадт, 21 марта 2019 г. Объединением ведущих германских исследовательских организаций, университетов, а также IT- и автомобильных компаний была создана открытая платформа для интеграции разработок в сфере содействия по управлению транспортным средством и автоматическому вождению для автомобилей смежных серий (Open Fusion Platform (OFP)). Открытая платформа позволяет автопроизводителям и поставщикам автокомпонентов при оптимальном уровне затрат провести интеграцию функций содействия управлению автомобилем с высоким уровнем автоматизации или полностью автоматических функций с последующим созданием систем автоматического управления автомобилем. В качестве разработчиков платформы выступила HELLA (которая является координатором данного объединения разработчиков поставщиков и производителей) совместно с немецким центром авиации и космонавтики и такими разработчиками и производителями, как Elektrobit Automotive, Infineon Technologies AG, InnoSent, Hella Aglaia Mobile Vision, Ройтлингенский университет, центр электротранспортных технологий RWTH Aachen Electromobility Center, а также инновационными компаниями Streetscooter Research и TWT GmbH Science and Innovation. Кроме того, партнерами проекта также выступают компании Continental и Nvidia.
Проект, финансирование которого в размере 4,4 миллионов евро было предоставлено Федеральным министерством образования и научных исследований Германии, был успешно завершен через 3 года. По его итогам, первые функции полностью автоматического вождения были реализованы на трех демонстрационных автомобилях. Согласно запрограммированному сценарию, электрокар в полностью автоматическом режиме проходит маршрут до станции подзарядки и подключается к стенду с источником питания путем правильного позиционирования над зарядной пластиной, расположенной на парковочном месте. После завершения подзарядки система управления автомобилем автоматически определяет свободное парковочное место и освобождает место для подзарядки. Д-р Михаэль Шиллинг, директор проекта по разработке первичной системы-прототипа автоматического управления автомобилем и координатор объединения по разработке проекта OFP отметил: «На сегодняшний день существуют только прототипы автомобилей, в системы которых заложены сценарии управления с высоким уровнем автоматизации или сценарии полностью автоматизированного движения. Момент начала серийного производства таких машин еще очень далек». Сегодня ведется серийное производство систем содействия управлению автомобилем, например, систем автоматической оптимизации параметров движения при попадании в пробку (traffic jam assistants), которые работают на базе данных, получаемых с двух датчиков. Но для реализации полноценного функционала автоматического управления автомобилем необходимо, чтобы в системы автомобиля поступала информация обо всех параметрах окружающей обстановки. Для этого необходимо свести воедино поток данных от множества датчиков и камер, чтобы создать полную модель с последующим анализом и отображением дорожной ситуации с достаточной степенью точности, которая позволит реализовать надежную функцию автоматического управления автомобилем». Одной из основных проблем в создании такой модели является построение интерфейсов между отдельными датчиками и центральным блоком управления. В настоящий момент не существует стандартов создания и применения таких интерфейсов. Интерфейсы существующих систем содействия управлению автомобилем предназначены непосредственно для реализации конкретных функций и отличаются в зависимости от поставщика или автопроизводителя. Именно поэтому аспекту потребовались полномасштабные исследования в рамках проекта.
Для сбора данных в рамках платформы OFP применялась система из 4 камер и 8-радарных датчиков, работающих в диапазоне частот 77 ГГц, которая позволяет отслеживать параметры окружающей обстановки на 360° вокруг автомобиля. На дополнительном автомобиле был установлен модуль обмена данными X-Communication module (модуль V2X), который также обеспечивает поддержание связи и обмен данными между автомобилями и внешней инфраструктурой, например, стендом для подзарядки автомобиля. Партнеры, в рамках проекта, опубликовали описание интерфейсов по отдельным компонентам на специальном открытом ресурсе «Спецификация по интерфейсам». В ходе работы исследовательской группой, совместно с ведущими поставщиками и производителями автомобильного оборудования и компонентов, была создана рабочая группа по разработке соответствующего стандарта ISO.
По итогам проведенной работы было опубликовано обновленное техническое описание интерфейса, на базе которого также будут внесены изменения и дополнения в существующие материалы по разработке ISO, что дает участникам проекта беспрецедентную возможность быстро и эффективно интегрировать свои продукты в общую открытую платформу. На базе комплексной модели окружающей среды, компания Hella Aglaia Mobile Vision разработала центральный компонент OFP. На базе сформированной посредством OFP визуализации разработчики получили представление об алгоритме и качестве восприятия окружающей обстановки системами автомобиля. Это, в свою очередь, позволяет принять решение по алгоритму объединения данных от датчиков. Данный алгоритм затем может быть использован для программирования сложной системы содействия управлению автомобилем или полностью автоматической системы управления. Д-р Шиллинг считает, что «это помогает активизировать разработку и, следовательно, создать более широкий набор функций, на базе которого в итоге будут разработаны полноценные функции автоматического управления автомобилем для последующей реализации на автомобилях среднего сегмента».
Работа по развитию OFP продолжится и после завершения проекта. При этом необходимо ответить на важный вопрос: как данные от датчиков будут обрабатываться посредством алгоритмов машинного обучения и использоваться для дальнейшей доработки и совершенствования функционала и перехода на новый этап разработки. Сценарий парковки также будет расширен с учетом различных дорожных ситуаций, возникающих в городе, а также исходя из скорости движения свыше 20 км/ч. При проработке этих сценариев необходимо использовать дополнительные датчики, например, комбинированные датчики света и расстояния (LiDAR). Именно на этом этапе будет полностью задействован потенциал платформы OFP. Кроме того, в дальнейшем необходимо обеспечить надежность функций, в том числе, на всех дальнейших этапах функциональная безопасность является крайне важным моментом.
Электронные системы автомобиля
EDS
EBD
ESP
MSR
ASR
HDC
ABS
DME
PCM
и ДР
ECU(ЭБУ)
Полезные ссылки:
Основные электронные системы современного автомобиля
Современный
автомобиль уже сложно представить без различных электронных систем управляющих и
контролирующих работу различных узлов и агрегатов. В настоящее время широкое
распространение получили бортовые системы контроля на базе электронных блоков
управления (ЭБУ).
Все электронные блоки по функциональному назначению могут быть классифицированы
на три основные системы управления: двигателем; трансмиссией и ходовой частью;
оборудованием салона и безопасностью автомобиля.
В мире разработано и серийно выпускается большое разнообразие систем управления
двигателями. Эти системы по принципу действия имеют много общего, но и
существенно отличаются.
Система управления бензиновым двигателем обеспечивает оптимальную его работу
путем управления впрыском. топлива, углом опережения зажигания, частотой
вращения коленчатого вала двигателя на холостом ходу и проведения диагностики.
Система электронного управления дизельным двигателем контролирует количество
впрыскиваемого топлива, момент начала впрыска, ток факельной свечи и т.п.
В электронной системе управления трансмиссией объектом регулирования является
главным образом автоматическая трансмиссия. На основании сигналов датчиков угла
открытия дроссельной заслонки и скорости автомобиля ЭБУ выбирает оптимальные
передаточное число трансмиссии и время включения сцепления. Электронная система
управления трансмиссией по сравнению с применявшейся ранее гидромеханической
системой повышает точность регулирования передаточного числа, упрощает механизм
управления, повышает экономичность и управляемость. Управление ходовой частью
включает в себя управление процессами движения, изменения траектории и
торможения автомобиля. Они воздействуют на подвеску, рулевое управление и
тормозную систему, обеспечивают поддержание заданной скорости движения.
Управление оборудованием салона призвано повысить комфортабельность и
потребительскую ценность автомобиля. С этой целью используются кондиционер
воздуха, электронная панель приборов, мультифункциональная информационная
система, компас, фары, стеклоочиститель с прерывистым режимом работы, индикатор
перегоревших ламп, устройство обнаружения препятствий при движении задним ходом
стеклоподъемники, сиденья с изменяемым положением.
Электронные системы безопасности включают в себя: противоугонные устройства,
аппаратура связи, центральная блокировка замков дверей, режимы безопасности и
т.д.
Каждая электронная система современного автомобиля управляется электронным блоком управления ЭБУ (ECU). Они относятся к тормозам, трансмиссии, подвеске, системе охраны, климатической установке, навигации и прочему. По набору функций ECU подобны друг другу настолько, насколько подобны соответствующие системы управления. Фактические отличия могут быть велики, но вопросы электропитания, взаимодействия с реле и прочими соленоидными нагрузками идентичны для самых разных ECU. Один из самых важных — это блок управления двигателем. Перечень изображенных электронных блоков управления (ЭБУ) определяет разнообразие установленних электронных систем, в даном случае на примере Audi A6
Многообразие ЭБУ в современном автомобиле на примере Audi A6
1. Блок управления
автономного отопителя
2. Блок управления АБС тормозов с EDS
3. Блок управления системы поддержания безопасной дистанциии
4. Передатчик системы контроля давления в шинах, передний левый
5. Блок управления бортовой сетью
6. Блок управления в двери водителя
7. Блок управления доступом и старта
8. Блок управления в комбинации приборов
9. Блок управления электронными приборами на рулевой колонке
10. Блок управления телефоном, системой телематик
11. Блок управления двигателем
12. Блок управления Climatronic
13. Блок управления регулировкой сиденья с запоминающим устройством и
регулировкой рулевой колонки;;
14. Блок управления регулировкой дорожного просвета; блок управления
корректором фар
15. CD-чейнджер; CD-ROM-дисковод
16. Блок управления в задней левой двери
17. Блок управления системой Air-Bag
18. Датчик скорости вращения автомобиля вокруг вертикальной осии
19. Блок управления в двери переднего пассажира
20. Блок управления регулировкой сиденья переднего пассажира с
запоминающим устройством
21. Блок управления в задней правой двери
22. Передатчик системы контроля давления в шинах, задний левый
23. Радиоприемник стояночного отопителя
24. Блок управления системой навигации с CD-дисководом; блок управления
голосовым вводом;;
25. Передатчик системы контроля давления в шинах, задний правый
26. Блок управления системой облегчения парковки
27. Центральный блок управления системой комфорта
28. Блок управления электрическим стояночным «ручным» тормозом
29. Блок управления энергоснабжением (менеджер батареи)
В настоящее время наиболее важным и экономически оправданным является широкое внедрение электронных систем, позволяющих улучшить характеристики и снизить стоимость эксплуатации двигателя и трансмиссии, а также систем для повышения безопасности.
Сегодня никого уже не удивишь обилием электроники в автомобиле, особенно высокого класса. Количество электронных систем и компонентов в автомобиле столь велико и разнообразно что подчас можно запутаться во всем его изобилии.
Этот
сайт является одним полных ресурсов, посвященных
автомобильной электроннике и диагностике неисправностей
автомобилей российского и иностранного производства.
Здесь Вы найдете описание, устройство и принципы
работы всего многообразия электронных систем современного автомобиляя.
Все материалы и программные средства размещенные на сайте и
доступные для скачивания являются некоммерческими, распространяются
бесплатно, и не предполагают ответственности
за возможный ущерб нанесенный Вам или Вашему автомобилю в результате
неумелого или некорректного применения материалов и программ.
Приветствуются поправки, дополнения, по тематике сайта. Если у Вас
есть программы, статьи или интересные ссылки большая просьба —
присылайте.
Содержание сайта постоянно пополняется. Если Вы не нашли нужной информации, заходите позже, вполне может быть, информация по интересующему Вас вопросу появится.
Електронные системы современного авто на примере Audi A6
Подробно о электронных системах современного автомобиля, а именно, более полное описание, устройство, принципы работы разные методы диагностирования Вы найдете на страницах сайта посвященных необходимой тематике. Каждый раздел сайта имеет наиболее полный подбор марериала по интересующей Вас теме.
Delphi продемонстрирует работу интеллектуальной автоматической системы управления автомобилем в реальных условиях
Системы автоматического управления автомобилем получают все большее развитие. Следуя этому тренду, компании Delphi Automotive PLC (NYSE: DLPH) и Mobileye (NYSE: MBLY) в рамках международной выставки CES-2017 в Лас-Вегасе проведут демонстрацию своей интеллектуальной системы на маршруте, проложенном по городским дорогам и автомагистралям.На трассе длиной в 10 км будут показаны все возможности автоматической системы управления CSLP (центральной системы ориентации и перемещения), запуск которой в производство запланирован на 2019 год. Система CSLP — это первое комплексное решение, сочетающее инновационную систему распознавания и передовую компьютерную платформу.
«К 2019 году компании-лидеры в области производства технологий для беспилотных автомобилей будут отличаться от всех остальных участников этого сегмента рынка по трем основным показателям: первоклассные системы распознавания (видеокамеры, радары и лазерные локаторы), опыт производства автомобильных систем и скорость компьютерной обработки данных, — говорит Глен де Вос (Glen De Vos), вице-президент сервисной службы компании Delphi. — Мы продемонстрируем реальные возможности системы CSLP врамках презентации на выставке CES-2017 в Лас-Вегасе».
В ходе этой демонстрации будут показаны способы решения стандартных задач вождения, в том числе выезды на автомагистраль, движение в плотной городской среде с пешеходами и велосипедистами, а также проезд в тоннелях.
Система CLSP воплотит в себе целый ряд передовых технологий:• Возможность ориентирования в пространстве: автомобиль будет знать координаты своего местоположения с точностью до 10 см, даже в условиях отсутствия подключения к системе GPS.
• Определение свободного пространства: автомобиль сможет перемещаться по сложным разделительным полосам и на участках без разметки.
• Контроль наличия пешеходов вокруг автомобиля (360 градусов).
• 3D-обнаружение автомобилей: система фиксирует наличие других автомобилей под любым углом. Возможность обнаружения частей автомобиля по общей форме транспортного средства или определения, находится ли автомобиль в движении, по положению колес; это крайне важно в условиях движения в городской среде с перекрестками дорог, расположенных под «неправильными» углами по отношению друг к другу. Возможность обнаружения автомобиля, выполняющего поворот перпендикулярно полосе движения на перекрестках.
• Выбор траектории движения и маневров: система имитирует характер вождения автомобиля, характерный для человека, и определяет оптимальную траекторию движения вперед.
Компания Delphi является мировым лидером в области разработки систем автоматического управления, датчиков и системной интеграции. Компания Mobileye является мировым лидером в сфере разработки компьютерных систем распознавания, картографирования, ориентации в пространстве и машинного обучения —главным образом для автомобильной отрасли.
Новое решение в области автоматического управления использует преимущества ключевых технологий, которыми обладают обе компании. Сюда относится система EyeQ® 4/5 компании Mobileye, в которой применяются обработка сигналов с датчиков, интеграция данных и создание образов, а также система REM™, определяющая местоположение автомобиля в режиме реального времени. Решения Delphi сочетают в себе компьютерные алгоритмы автоматических систем управления, разработанные дочерней компанией Ottomatika, в том числе функции выбора траектории движения и применение многоцелевого контроллера MDC с полномасштабной видеокамерой, радаром и лазерным локатором.
Кроме того, инженеры обеих компаний продолжают работать над созданием технологии сбора и обобщения данных от различных средств обнаружения нового поколения, а также над развитием новой концепции вождения, максимально приближенной к человеческой манере управления автомобилем. Этот модуль сочетает в себе систему моделирования вождения, разработанную компанией Ottomatika, и систему глубокого обучения от компании Mobileye, которые позволяют управлять автомобилем с учетом действий водителей других транспортных средств и поведения пешеходов в сложной городской среде.
На «КАМАЗе» создан модуль автономного управления автомобилем
На «КАМАЗе» разработан мобильный накрышный модуль автономного управления автомобилем. Проект получил название «Аватар».
«Аватар» – это мобильный модуль, устанавливаемый на крышу автомобиля, который позволяет «превратить» автомобиль в беспилотное транспортное средство. Для осуществления автономного управления с помощью модуля автомобиль должен быть оснащён автоматической коробкой передач, электронной педалью акселератора, электронной тормозной системой и электрогидроусилителем руля. Все агрегаты должны поддерживать удалённое управление через автомобильную CAN-шину.
К разработке «Аватара» в Научно-техническом центре «КАМАЗа» приступили в 2018 году. Дизайн и начинка модуля были разработаны Службой инновационных автомобилей в 2019 году. Сегодня идёт отработка алгоритмов управления и принятия решений, отладка программного обеспечения, валидация и тестирование системы автономного управления в реальных условиях. Модуль тестируется на автомобиле КАМАЗ-43118.
«Развитие беспилотного транспорта, в том числе и грузового – один из основных трендов автомобильной отрасли. Такие решения призваны оптимизировать дорожный трафик, снизить стоимость перевозок и число ДТП. Предприятия Ростеха ведут активную работу по развитию беспилотного транспорта, лидирующие позиции в этой области занимает ПАО «КАМАЗ». Компания уже испытывает беспилотный автобус «Шатл» для перевозки пассажиров и бескабинный грузовик «Челнок» для транспортировки грузов на территории предприятия. Новинка «Аватар» позволяет сделать «умными» уже существующие машины, что открывает возможность оперативно и с меньшими затратами наращивать парк беспилотной техники. Внедрение этой разработки в перспективе может привести к расширению использования беспилотного транспорта на территории России», – сказал исполнительный директор Госкорпорации Ростех Олег Евтушенко.
В отличие от своего предшественника – беспилотного автомобиля из проекта «Одиссей», «Аватар» дополнительно оснащён системой дублирования автономного управления, органов принятия решения и системы fusion, состоящей из различных сенсоров, как во фронтальной зоне, так и вокруг автомобиля, что значительно повышает безопасность движения в автономном режиме, а также позволяет страховать основную систему при её сбое или поломке. Также предусмотрено дублирование системы связи, что позволяет в случае помех со стороны одного из передающих каналов, переключиться на другой. Модуль и программное обеспечение разработаны в соответствии со стандартом ISO 26262 (Европейский стандарт функциональной безопасности).
«В определённых ситуациях, при выполнении ряда опасных для человека задач необходимо, чтобы машина выполняла их без водителя. В их числе – масштабные пожары, химические заражения, бактериологические и радиационные заражения территории, ликвидация последствий других чрезвычайных ситуаций», – пояснил цель проекта главный конструктор инновационных автомобилей Научно-технического центра Сергей Назаренко.
В случае, если случился отказ одного блока или прерываются пакеты данных, в приоритет сразу переходит другой блок. Если же система полностью отказывает, то происходит безопасное автономное торможение путём отправки управляющих команд на агрегаты автомобиля. В результате полностью исключается человеческий фактор, так как система автономного управления не устаёт и не засыпает.
В беспилотном режиме автомобиль может передвигаться со скоростью до 60 км/ч. В дальнейшем предельную скорость будет ограничивать заказчик.
«Модуль «Аватар» способен строить цифровую карту дорог с помощью 3D-лидаров. По этой карте он может самостоятельно построить себе маршрут для передвижения. Оператор указывает конечную точку маршрута, система подгружает карту, выстраивает маршрут и после этого машина начинает движение по заданной траектории. Для большей надёжности используется комплексированная навигационная система, которая позволяет подгружать дополнительные координаты со спутниковой навигационной системы и включать поправки от инерциальной системы навигации», – рассказал главный специалист программного обеспечения систем управления — руководитель группы Службы главного конструктора инновационных автомобилей Научно-технического центра Ильназ Юнусов. По его словам, если заказчик захочет роботизировать свои автомобили, он может приобрести и установить на них накрышные модули «Аватар». Модули будут интегрированы в систему управления автомобилем, после чего смогут выполнять поставленные им задачи.
В планах камазовских разработчиков – оснастить систему «Аватар» квадрокоптером, с помощью которого можно будет производить оцифровку и составление карты местности. Далее собранные данные отправятся в модуль «Аватар», что позволит автомобилю более качественно выстраивать маршрут и двигаться на большие расстояния автономно. Связь с модулем «Аватар» осуществляется через промышленный Wi-Fi и LTE, а также через резервный канал — УКВ.
Тизер видеообзора уникального модуля можно посмотреть здесь.
Комплексные системы управления транспортными средствами (автомобили)
18.7.
Полные системы управления транспортными средствами В принципе, полная система управления автомобилем включает в себя один ЭБУ, который контролирует все аспекты транспортного средства. На рисунке 18.21 показана полная система управления транспортным средством. Однако на практике вместо одного блока управления используются отдельные ЭБУ, которые могут обмениваться данными друг с другом.
Рис.18.21. Представление полной системы управления автомобилем.
18.7.1.
Преимущества централизованного управления преобладают в основных областях, то есть входах и выходах. На стороне ввода учитывайте все вводы, необходимые для работы каждой из следующих трех систем.
• Система зажигания
• Топливная система
• Система трансмиссии.
Скоро станет ясно, что существует множество общих требований, даже если речь идет всего о трех возможных областях управления транспортным средством.Одна центральная система управления потенциально может снизить сложность проводки, увеличивая при этом возможности управления. Это фактически преимущество выходов. Рассмотрим обычное рабочее состояние автомобиля с резким и резким ускорением и возможные реакции каждой из перечисленных ниже систем:
| Система | Возможное действие |
| Коробка передач топлива для зажигания | Задержка газораспределения Впрыснуть дополнительное топливо Переключить передачу на более низкую |
Если каждая система работает независимо, возможно, что каждая из них не будет реагировать до некоторой степени наилучшим образом по отношению к другим.Например, время и количество топлива могут быть установлены, но затем ЭБУ топлива может решить переключить передачу на более низкую, таким образом увеличивая частоту вращения двигателя. Это, в свою очередь, требует изменения топлива и времени. На этапе трансмиссии это вызывает снижение КПД и увеличение выбросов.
С одним блоком управления или, по крайней мере, при наличии связи между этими тремя системами, все правильные действия могут выполняться в наиболее подходящее время. Однако сложность программирования требует гораздо большей вычислительной мощности.Это особенно очевидно, если принять во внимание другие системы автомобиля, такие как антипробуксовочная система, активная подвеска ABS и рулевое управление.
18.7.2.
Система Bosch Cartronic В предыдущем разделе необходимость отдельных электронных систем для связи друг с другом была подчеркнута на простом примере. Сложность комбинирования систем, как предложено выше, возрастает, если принимать во внимание другие факторы, такие как улучшение характеристик, выбросов, безопасности и комфорта водителя.Bosch использует иерархическую структуру сигналов для решения этой проблемы. На рисунке 18.22 показаны два способа соединения систем. В первом используется обычная проводка, а во втором — сеть контроллеров (CAN). Разница между потоком данных в автономной системе и потоком данных в иерархической системе представлена на рис. 18.23.
Рис. 18.22. Связывание систем автомобиля. A. Используя обычную проводку. Б. Использование CAN.
Система Cartronic работает по принципу, согласно которому каждой системой может управлять только система, расположенная над ней в иерархии.Например, интегрированные системы управления трансмиссией управления двигателем и коробкой передач взаимодействуют не напрямую, а через иерархически более высокую систему управления трансмиссией.
В настоящее время ведутся исследования по разработке полных систем управления для транспортных средств. Ожидается, что по мере интеграции все большего и большего числа систем стоимость необходимой электроники будет снижаться. Вычислительная мощность, необходимая для этого типа системы, уже доступна. Фактически может быть достаточно 32-битного высокоскоростного микроконтроллера.Проблема с использованием одного ЭБУ для управления всем транспортным средством может быть связана с его стоимостью. Однако надежность электронных блоков управления автомобиля постоянно повышается.
Рис. 18.23. Картронная система.
Полное централизованное управление имеет и другие возможные преимущества, например, возможность расширения одной панели диагностики (OBD) для охвата всего автомобиля. Это может значительно сэкономить время на ремонт и эксплуатационные расходы.
Vehicle Control — обзор
I ВВЕДЕНИЕ
Реактивные встроенные системы реального времени широко используются в индустрии электронных систем.Приложения включают управление транспортными средствами, бытовую электронику, системы связи, дистанционное зондирование и бытовую технику. В таких приложениях спецификации могут постоянно меняться, и время выхода на рынок сильно влияет на успех. Это требует использования программно-программируемых компонентов, поведение которых можно довольно легко изменить. Такие системы, которые используют компьютер для выполнения определенной функции, но не используются и не воспринимаются как компьютер, обычно называются встроенными системами. В частности, нас интересуют реактивные встроенные системы.Реактивные системы — это системы, которые непрерывно реагируют на окружающую среду со скоростью окружающей среды. Их можно противопоставить интерактивным системам, которые реагируют с окружающей средой на своей собственной скорости, и трансформирующим системам, которые принимают массив входных данных и преобразуют его в массив выходных данных [1].
Большой процент мирового рынка микропроцессоров занимает микроконтроллеры, которые являются программируемым ядром встроенных систем. В дополнение к микроконтроллерам, встроенные системы могут состоять из ASIC и / или программируемых вентильных матриц, а также других программируемых вычислительных блоков, таких как процессоры цифровых сигналов (DSP).Поскольку встроенные системы постоянно взаимодействуют со средой, которая является аналоговой по своей природе, обычно должны быть компоненты, которые выполняют аналого-цифровое и цифро-аналоговое преобразование. Значительная часть проблемы проектирования состоит в выборе программной и аппаратной архитектуры для системы, а также в решении, какие части должны быть реализованы в программном обеспечении, работающем на программируемых компонентах, а какие должны быть реализованы в более специализированном оборудовании.
Встроенные системы часто используются в жизненно важных ситуациях, когда надежность и безопасность являются более важными критериями, чем производительность.Сегодня встраиваемые системы разрабатываются с применением специального подхода, который в значительной степени основан на предыдущем опыте работы с аналогичными продуктами и на ручном проектировании. Использование языков более высокого уровня, таких как C, в некоторой степени помогает, но с увеличением сложности этого недостаточно. Формальная проверка и автоматический синтез реализаций — вернейшие способы гарантировать безопасность. Однако как формальная проверка, так и синтез с высоких уровней абстракции были продемонстрированы только для небольших специализированных языков с ограниченной семантикой.Это противоречит сложности и неоднородности типичных встроенных систем.
Мы считаем, что подход к проектированию должен быть основан на использовании одной или нескольких формальных моделей для описания поведения системы на высоком уровне абстракции, прежде чем будет принято решение о ее разложении на аппаратные и программные компоненты. Окончательная реализация системы должна производиться в максимально возможной степени с использованием автоматического синтеза на этом высоком уровне абстракции, чтобы гарантировать, что реализации являются «правильными по построению».«Валидация (посредством моделирования или верификации) должна проводиться в максимально возможной степени на более высоких уровнях абстракции.
Типичная аппаратная архитектура для встраиваемой системы проиллюстрирована на рисунке 1. Архитектура этого типа сочетает в себе специализированное аппаратное обеспечение со встроенным программным обеспечением, что придает архитектуре определенную степень сложности и неоднородности. Однако даже в самих программных или аппаратных частях часто наблюдается неоднородность. В программном обеспечении процессы, ориентированные на управление, могут быть смешаны под контролем многозадачного ядра реального времени, работающего на микроконтроллере.Кроме того, задачи жесткого реального времени могут выполняться совместно на одном или нескольких программируемых DSP. Стили дизайна, используемые для этих двух программных подсистем, вероятно, будут сильно отличаться друг от друга, и тестирование взаимодействия между ними вряд ли будет тривиальным.
Рис. 1. Типичная реактивная архитектура встроенной системы реального времени.
Аппаратная часть проекта часто будет содержать одну или несколько ASIC, возможно, разработанных с использованием инструментов логического или поведенческого синтеза. С другой стороны, значительная часть конструкции оборудования, скорее всего, состоит из взаимосвязей стандартных компонентов, таких как процессоры и запоминающие устройства.Опять же, на этот раз с аппаратной стороны, мы обнаруживаем неоднородность. Стили дизайна, используемые для определения и моделирования ASIC и взаимосвязанных товарных компонентов, вероятно, будут совершенно разными. Таким образом, типичная система не только смешивает дизайн оборудования с дизайном программного обеспечения, но также смешивает стили дизайна в каждой из этих категорий.
Чаще всего набор задач, которые реализует система, не определяется строго и однозначно, поэтому процесс проектирования требует нескольких итераций для достижения сходимости.Более того, в процессе проектирования уровень абстракции, детализации и специфичности в разных частях дизайна различается. Еще больше усложняет ситуацию то, что наборы навыков и стили дизайна, используемые разными инженерами в проекте, вероятно, будут разными. Конечный результат состоит в том, что в процессе проектирования будет использоваться множество различных методов спецификации и моделирования.
Ключевой проблемой является управление сложностью и неоднородностью дизайна. Мы считаем, что использование формальных моделей и высокоуровневого синтеза для обеспечения безопасного и правильного проектирования зависит от понимания взаимодействия между различными формальными моделями.Только тогда простота моделирования, необходимая для проверки и синтеза, может быть согласована со сложностью и неоднородностью реального дизайна.
Параллельный процесс проектирования смешанных аппаратных / программных встроенных систем включает решение следующих подзадач: спецификация, проверка и синтез. Хотя эти проблемы нельзя полностью разделить, мы рассмотрим их ниже в трех следующих друг за другом разделах.
Система управления автомобильными двигателями: мозг за двигателями
автор: sasmita
* Это вторая часть нашей серии видеоблогов, посвященных электродвигателям.Обязательно посмотрите видео, часть I
Вторая часть серии видео о Automotive Motor Control System посвящена блоку управления , который управляет вращением двигателей на основе входных данных от приложения.
В этом видео мы подчеркнем необходимость таких систем управления. Мы также объясним, как работает система управления двигателем и какие компоненты задействованы.
По мере развития автомобилей остро ощущалась потребность в компонентах, облегчающих вождение и другие операции.Все мы почувствовали, насколько сложно вращать рулевое колесо с ручным управлением.
Напротив, рулевое управление с электроусилителем позволяет легко вращать одно и то же колесо с некоторой помощью двигателя.
Это система управления автомобильным двигателем , которая выполняет все сложные вычисления, касающиеся объема необходимой помощи.
Видео подробно раскрывает мир Motor Control Systems .
Видео предоставит основные сведения о:
- Что такое система управления двигателем?
- Зачем нужна система управления двигателем в автомобильной промышленности?
- Каковы различные компоненты такой системы управления автомобильным двигателем?
- Как работает контроллер двигателя?
- Каковы общие области применения автомобильных систем управления двигателями в автомобилях?
Видео разработано, чтобы дать вам хорошее представление о системах управления двигателем w.r.t automotive. Если вам нужна дополнительная информация, мы рекомендуем вам прочитать наш подробный блог о системе управления автомобильным двигателем.
Рубрика: Блог по автомобилестроению и Интернету вещей
Блок-схема системы управления транспортным средством, включая интеллектуальную …
Контекст 1
… ВВЕДЕНИЕ D RIVING контроль, дорога, безопасность и другие предметы водитель, транспортное средство, движущееся электронно или неподвижно вокруг управляемого транспортного средства [1]. Как описано в [2], ошибка водителя упоминается как причина от 45% до 75% дорожно-транспортных происшествий и как фактор, способствующий большинству всех столкновений.Основная цель существующих электронных систем управления транспортным средством состоит в том, чтобы облегчить задачу вождения путем определения намерений водителя и оказания помощи водителю, управляя транспортным средством для безопасного, надежного и плавного выполнения намерений водителя. Эффективность электронных систем управления значительно повышается, когда водитель и электронное управление работают вместе для достижения одной и той же цели предотвращения несчастных случаев и для максимального увеличения способности предотвращать аварии транспортного средства с постоянным водителем как системы.Один из подходов к достижению этого — своевременное предоставление четкой и прозрачной консультативной информации водителю, чтобы ответственный водитель мог соответствующим образом отреагировать. Такую консультативную информацию можно собрать или вычислить с помощью датчиков, которые обычно находятся на транспортном средстве, которые реализуют двустороннее управление с обратной связью между водителем и электронным управлением. А именно, электронное управление следует за намерением водителя, и водитель реагирует на консультативную информацию от электронного управления, чтобы изменить свои входные сигналы привода (например, опускание дроссельной заслонки, ослабление усилий рулевого управления и т. Д.). Таким образом, возможна бесшовная координация между водителем и электронным управлением, и это, вероятно, сводит к минимуму влияние потенциальных угроз безопасности из-за ошибок водителя за счет коллективных действий водителя и электроники. Эта парадигма не нова. Система предупреждения о выезде с полосы движения (LDW) использует датчик обзора для определения положения автомобиля относительно полосы движения и предупреждения водителя о непреднамеренном выезде с полосы движения [4, 5]. Система предупреждения о лобовом столкновении (FCW) [6] использует датчики окружающей среды для обнаружения потенциальных угроз безопасности перед автомобилем и заблаговременного предупреждения водителя.Однако существующие предупреждения водителя действуют в установившихся или квазистационарных условиях движения. В этом документе рассматриваются предупреждения, которые возникают вблизи предела управляемости, условия вождения или маневрирования, в которые обычно вмешиваются средства контроля устойчивости транспортного средства. В дополнение к проблемам, возникающим вблизи предела управляемости, для повышения экономии топлива можно также использовать подход системы консультирования водителя, т. Е. Систему, которая может использовать советы и / или инструктаж, чтобы помочь водителю изучить привычки вождения, которые позволяют экономить топливо [7, 29].В этом документе основное внимание уделяется использованию данных средств контроля устойчивости транспортного средства для предоставления предупреждений в режиме реального времени, когда транспортное средство приближается к пределу управляемости. Он является частью группы функций предупреждения, определенной как система Intelligent Personal Minder (IPM). Вообще говоря, интеллектуальные данные, вычисленные для системы IPM, могут быть отправлены для предупреждения или информирования водителя через различные устройства, включая тактильную педаль, дисплей, предупреждающий звуковой сигнал и т. Д. На рисунке 1 показано взаимодействие IPM. система с другими подсистемами и функциями.(ESC). Счетчик пределов управляемости (HLM) раскрывается в разделе III, который определяет, насколько далеко условия движения находятся от предельного управления. Раздел IV предоставляет метод для характеристики поведения при вождении. Выводы представлены в разделе V. II. ОБСУЖДЕНИЕ УПРАВЛЕНИЯ ОБОРУДОВАНИЕМ АВТОМОБИЛЯ Управляемость автомобиля определяет его способность поворачивать и маневрировать [18-21]. Автомобиль должен держаться на дороге четырьмя пятнами контакта с шинами, чтобы обеспечить максимальную управляемость.Шина, превышающая предел сцепления, может вращаться, скользить или скользить. Состояние, при котором одна или несколько шин превышают свои пределы сцепления, в этой статье называется предельным условием обработки, а предел сцепления называется пределом обработки. Чтобы компенсировать управление транспортным средством в случае, если водитель не может управлять транспортным средством сверх предела управляемости, была разработана электронная система контроля устойчивости (ESC) для перераспределения усилий в шинах для создания момента, который может эффективно поворачивать транспортное средство в соответствии с запросом водителя на рулевое управление.А именно, для управления автомобилем во избежание недостаточной и избыточной поворачиваемости. С момента своего дебюта в 1995 году системы ESC были реализованы на различных платформах [22,23]. Федеральный стандарт безопасности автотранспортных средств 126, вводимый в действие в течение 2010 модельного года и достижение полной установки к 2012 модельному году, требует наличия систем ESC на любом транспортном средстве с полной массой менее 10 000 фунтов. Система ESC реализована как расширение системы ABS и скоростной TCS. система. Он обеспечивает рыскание и боковую устойчивость, помогая динамике автомобиля, ориентированной на намерения водителя.Он распределяет тормозное давление (выше или ниже давления, прикладываемого водителем) к отдельному колесу (ям), чтобы создать активный момент для противодействия неожиданному рысканию и боковому скольжению транспортного средства. Это приводит к усилению управляемости на пределе управляемости для любой поверхности сцепления во время торможения, разгона или движения накатом. Обнаружение условия обработки лимита может быть выполнено с использованием данных, уже существующих в системе ESC, поэтому новые датчики не требуются. Рассмотрим автомобиль, оснащенный системой ESC с датчиком скорости рыскания, датчиком на рулевом колесе, боковым акселерометром, датчиками скорости вращения колес, датчиком тормозного давления главного цилиндра, продольным акселерометром и т. Д.Переменные движения транспортного средства определены в системах координат, как определено в ISO-8855 [24], где рама, закрепленная на кузове транспортного средства, имеет вертикальную ось вверх, продольную ось вдоль продольного направления кузова транспортного средства и направленную поперечную ось. со стороны пассажира на сторону водителя. Вообще говоря, средства управления с обратной связью на уровне транспортного средства могут быть вычислены из отдельных переменных движения, таких как скорость рыскания, угол бокового скольжения или их комбинаций, вместе с арбитражем среди других команд управления, таких как торможение водителем, запрос крутящего момента двигателя, ABS и TCS.В дальнейшем команды управления уровнем системы транспортного средства обсуждаются с определенными подробностями для облегчения последовательного обсуждения. Хорошо известная модель велосипеда фиксирует динамику транспортного средства, его скорость рыскания ω вдоль вертикальной оси кузова транспортного средства z и угол бокового скольжения β, определенный на его задней оси r, подчиняются следующему …
Системы контроля устойчивости транспортного средства: An обзор интегрированной системы, улучшающей торможение, тягу и противобуксовочную способность | 2012-02-24
Леон является одним из ведущих технических редакторов Mitchell1.Он выпускник Универсального технического института, ранее работал в компании Aamco Transmissions и мобильным механиком. Он имеет сертификат 609 и специализируется на автомобильной диагностике.
Системы контроля устойчивости автомобиля (VSC) были созданы, чтобы помочь уменьшить количество пробуксовки колес при ускорении и в тяжелых условиях вождения. Как правило, для современных двигателей с высоким крутящим моментом регулирование пробуксовки колес или противобуксовочная система могут повысить как безопасность, так и комфорт, особенно на скользкой дороге.Он обеспечивает плавный старт и ускорение во всех диапазонах скоростей без пробуксовки колес или рывков, а также уменьшает избыточную и недостаточную поворачиваемость при прохождении поворотов. Так что, если ваш клиент едет так, как будто он его украл, случайно смотрит на свою приборную панель и видит, что на секунду или две внезапно загорается индикатор контроля устойчивости, ему не о чем беспокоиться. Это просто означает, что он только что воспользовался системой контроля устойчивости.
Система контроля устойчивости работает за счет взаимодействия датчиков под напряжением и антиблокировочной системы тормозов.Он работает с помощью датчиков, собирающих информацию, обрабатывая ее через компьютер и отправляя в блок антиблокировочной тормозной системы (ABS). Вся эта информация обрабатывается за миллисекунды. Подавая гидравлическое давление через антиблокировочную тормозную систему, можно индивидуально изменять тягу колес. Система ABS работает, направляя количество тормозной жидкости на каждое отдельное колесо с помощью клапанов в системе ABS. Каждый производитель включает в себя различные датчики, чтобы создать свою собственную версию системы контроля устойчивости, но все начинается с системы ABS.
Датчик угла поворота рулевого колеса, датчик скорости автомобиля, датчик скорости колеса, датчик бокового ускорения, датчик тормозного давления и датчик скорости рыскания, а также компьютер или ЭБУ являются основными для большинства систем контроля устойчивости. Некоторые из более сложных систем регулируют дроссельную заслонку электронно, даже ограничивая количество используемых цилиндров, а также используют систему ABS для ограничения пробуксовки колес.
Audi использует систему под названием Acceleration Slip Regulation (ASR). ASR работает с электронным ускорителем и использует компоненты ABS.Если одно колесо внезапно начинает вращаться быстрее других (пробуксовка колес), ASR вмешивается в систему управления двигателем и снижает мощность до тех пор, пока колесо не перестанет вращаться (эта система также работает с электронной блокировкой дифференциала (EDL)). Ссылаясь на другой пример, BMW использует подсистему под названием Dynamic Traction Control (DTC), которая является партнером системы Dynamic Stability Control (DSC). При движении по рыхлому гравию или снегу активация DTC увеличивает тягу, позволяя увеличить пробуксовку колес, при этом система DSC включается только при необходимости, а при желании DSC можно полностью отключить.
Водители, которые хотят более спортивного стиля вождения, могут активировать DTC, чтобы избежать пробуксовки колес или заноса.
Вы не поверите, но звук также может повлиять на то, как ваши клиенты водят машину. Mitsubishi — производитель Lancer Evolution, автомобиля, известного своей способностью управлять практически любой дорогой на своем пути, слушая. Активная система контроля устойчивости (ASC) на Evo работает иначе, чем обычные тормозные системы. Разница в том, что система ASC отслеживает звуки, ощущения и характеристики автомобиля.Мониторинг шума был введен как еще один метод «увидеть», и в этом случае услышать, что происходит во время вождения автомобиля, он работает с другими датчиками, чтобы предоставить ценные данные в реальном времени.
Например, предположим, что ваш клиент слышит громкий стук за рулем. В этот момент звуковые мониторы отправят сигнал на компьютер, чтобы проверить все системы на предмет возможных неисправностей.
Поиск и устранение неисправностей
Диагностические коды неисправности (DTC) устанавливаются в различных условиях, в зависимости от обнаруженной неисправности.Большинство кодов неисправности устанавливаются только во время работы автомобиля. Некоторые коды неисправности также будут установлены во время самопроверки сразу после запуска двигателя. В большинстве случаев, когда сигнальная лампа включается для системы контроля тяги, это происходит из-за неисправного датчика. Некоторые из наиболее распространенных отказов системы контроля тяги включают:
Неисправность датчиков скорости колес, датчика угла поворота рулевого колеса, бокового датчика, датчика скорости автомобиля.
Повреждены жгут проводов и разъемы.
Неисправность ABS-ECU.
Для дополнительной оценки освещения контрольной лампы тяги:
1. Соберите информацию о проблеме. (Спросите своего клиента, когда возникает проблема? Возникает только в определенных условиях?)
2. Убедитесь, что описанное условие существует. (Проверьте визуальные знаки.)
3. Проверьте автомобиль на наличие кодов неисправности.
4. Если вы можете проверить состояние, но коды неисправности отсутствуют или система не может связаться с диагностическим прибором, убедитесь, что основная тормозная система работает должным образом.
[PAGEBREAK]
Пример описания системы динамического торможения
Система динамического контроля тормозов / контроля устойчивости автомобиля Toyota Sequoia 2009 года разработана для улучшения торможения, тяги и контроля скольжения в комплексной интегрированной системе. Кратко обсудим каждую подсистему.
ABS (антиблокировочная тормозная система) помогает предотвратить блокировку колес при резком торможении или на скользкой поверхности.ЭБУ системы противоскольжения (встроенный в привод VSC) определяет условия блокировки колес, получая сигналы скорости автомобиля от каждого датчика скорости, и отправляет управляющие сигналы на двигатель насоса и электромагнитный клапан, чтобы предотвратить блокировку колес, контролируя давление тормозной жидкости на каждое колесо. цилиндр. Контрольная лампа АБС загорается при неисправности АБС.
Система EBD (электронное распределение тормозных сил) использует ABS, распределяя тормозные усилия между передними и задними колесами в соответствии с условиями движения.Когда тормоза применяются во время поворота, он также контролирует тормозные силы правого и левого задних колес, помогая поддерживать устойчивость автомобиля (предотвращая избыточную поворачиваемость).
ЭБУ системы противоскольжения получает сигналы скорости от каждого датчика скорости для определения условий пробуксовки колес и отправляет управляющие сигналы на соленоид. Электромагнитный клапан регулирует давление тормозной жидкости в каждом колесном цилиндре и должным образом распределяет управляющую мощность между передними и задними колесами, а также правым задним и левым задним колесами.Контрольные лампы ABS и BRAKE, а также контрольные лампы VSC OFF и SLIP загораются, указывая на неисправности в системе EBD.
Основная цель BA (система экстренного торможения) — обеспечить вспомогательное тормозное усилие для помощи водителям, которые не могут создать достаточное тормозное усилие во время экстренного торможения. ЭБУ системы противоскольжения получает сигналы скорости от каждого датчика скорости и сигнал давления жидкости от датчика давления в главном цилиндре, чтобы определить, нужен ли усилитель торможения. Если требуется помощь при торможении, ЭБУ системы противоскольжения отправляет управляющие сигналы на двигатель насоса и соленоид.Затем насос и электромагнитный клапан регулируют давление, подаваемое на каждый колесный цилиндр. Контрольная лампа ABS и контрольные лампы VSC OFF и SLIP загораются, указывая на неисправности в системе BA.
Переключатель VSC OFF позволяет переключаться в нормальный режим, режим TRAC OFF, режим AUTO LSD (дифференциал с ограниченным скольжением) и режим VSC OFF. TRAC (контроль тяги) для автомобилей 2WD или 4WD в режиме h3 помогает предотвратить пробуксовку ведущих колес, если водитель чрезмерно нажимает на педаль акселератора при трогании с места или при ускорении на скользкой поверхности (предотвращает пробуксовку колес).ЭБУ системы противоскольжения определяет состояние пробуксовки автомобиля, получая сигналы от каждого датчика скорости и блока управления двигателем (по шине CAN). ЭБУ системы противоскольжения управляет крутящим моментом двигателя с помощью блока управления двигателем и давлением тормозной жидкости через насос и электромагнитный клапан. Индикатор SLIP мигает, когда система работает. Индикатор VSC OFF мигает, а индикатор SLIP загорается при неисправности системы TRAC.
Система VSC помогает предотвратить скольжение автомобиля вбок при проскальзывании передних или задних колес во время поворота.
ЭБУ системы противоскольжения определяет состояние автомобиля, получая сигналы от датчика скорости, датчика скорости рыскания и замедления и датчика угла поворота рулевого колеса. ЭБУ системы противоскольжения управляет крутящим моментом с помощью контроллера ЭСУД и давлением тормозной жидкости с помощью электромагнитного клапана. Мигает индикатор SLIP и звучит зуммер системы противоскольжения, когда система работает. При возникновении неисправности в системе VSC мигает индикатор VSC OFF и загорается индикатор SLIP.ПРИМЕЧАНИЕ. Переключатель VSC OFF останавливает работу VSC.
A-TRAC (активный контроль тяги) для системы полного привода регулирует мощность двигателя и давление тормозной жидкости, которое прикладывается к проскальзывающему колесу, и распределяет тяговое усилие, которое было бы потеряно из-за проскальзывания, на остальные колеса для достижения эффект LSD (дифференциала повышенного трения). Система A-TRAC работает, когда переключатель управления 4WD установлен в положение 4L или 4H.
Индикатор SLIP мигает, когда система работает.Индикатор VSC OFF мигает, а индикатор SLIP загорается, указывая на неисправность в системе A-TRAC. Для автомобилей 2WD (и автомобилей 4WD в режиме h3) AUTO LSD (автоматический дифференциал повышенного трения) будет работать при включенном VSC (режим TRAC OFF или AUTO LSD) и нажатой педали акселератора.
Система AUTO LSD используется для ограничения тормозного давления и уменьшения дифференциального движения, передачи крутящего момента на противоположное ведущее колесо для обеспечения устойчивости при движении по бездорожью и / или при пробуксовке ведущих колес при трогании с места на склоне с одним колесом. по снегу / льду.
УКАЗАНИЕ: нажатие педали тормоза отменяет управление системой AUTO LSD.
Индикатор SLIP мигает, а индикатор AUTO LSD продолжает гореть, когда система работает. Индикатор VSC OFF мигает, а индикатор SLIP загорается, указывая на неисправность в системе AUTO LSD.
Работа в режиме AUTO LSD становится возможной в режиме TRAC OFF или в режиме AUTO LSD. Режим TRAC OFF начинается, когда автомобиль находится в нормальном режиме и переключатель VSC OFF нажат на короткое время.
AUTO LSD режим начинается, когда автомобиль находится в нормальном режиме или режиме TRAC OFF и переключатель VSC OFF нажат в течение трех или более секунд. В режиме TRAC OFF или AUTO OFF световые индикаторы AUTO LSD и SLIP на комбинированном измерителе горят, и работа TRAC отключается.
Когда скорость автомобиля превышает 31 милю в час, автомобиль автоматически возвращается в нормальный режим.
Когда скорость автомобиля составляет 31 милю в час или меньше, автомобиль возвращается в режим AUTO LSD.
Доля рынка передовых систем управления транспортными средствами, тенденции к 2031 году
Рынок передовых систем управления транспортными средствами: введение
- Усовершенствованные системы управления транспортными средствами (AVCS или AVEC) являются частью инициативы Smart Highway, также известной как интеллектуальные транспортные системы (IVHS) или интеллектуальные транспортные системы (ITS). AVCS набирают популярность во всем мире. Усовершенствованная система управления транспортным средством предоставляет информацию о сильно локализованных и часто меняющихся условиях в непосредственной близости от него и может инициировать действия на основе этих условий.
Ключевые драйверы рынка передовых систем управления транспортными средствами
- Безопасность пассажиров в настоящее время является ключевым направлением в автомобильном секторе. Заинтересованные стороны в цепочке создания стоимости автомобилей признают важность безопасности пассажиров и пассажиров и постоянно обновляют свои предложения, чтобы обеспечить отказоустойчивые технологии безопасности, которые защитят пассажиров и пешеходов. Упреждающая реализация политики и осведомленность потребителей сыграли ключевую роль в повышении спроса на передовые системы управления транспортными средствами.
Ограничения на рынке передовых систем управления транспортными средствами
- Уровень проникновения передовых систем управления транспортными средствами в разных странах разный. В экономически развитых странах, как правило, эти технологии широко используются в различных пассажирских и коммерческих транспортных средствах, в то время как развивающиеся страны имеют более низкое проникновение из-за фактора стоимости.
- Пандемия COVID-19 затронула национальные и международные цепочки поставок, производство и научно-исследовательские работы, что, в свою очередь, затруднило рынок.После первой волны COVID-19 мировая экономика начала открываться, и производство автомобилей начало нормализоваться; однако рост числа случаев COVID-19 в странах по всей Европе побудил правительства в регионе выбрать второй раунд ограничительных ограничений, и, следовательно, неопределенность в автомобильной промышленности сохраняется.
Возможности на рынке передовых систем управления транспортными средствами
- Переход к полностью автономным транспортным средствам обеспечивается за счет постепенного внедрения множества взаимосвязанных технологий безопасности.По каждому признаку эти технологии добавляют новые возможности, которые помогают безопасной и эффективной эксплуатации новых транспортных средств и продвигают рынок к все более автономному будущему. Предполагается, что этот сценарий открывает значительные возможности для рынка передовых систем управления транспортными средствами.
Европа занимает значительную долю мирового рынка передовых систем управления транспортными средствами
В зависимости от географического положения рынок передовых систем управления транспортными средствами можно разделить на Северную Америку, Европу, Азиатско-Тихоокеанский регион, Ближний Восток и Африку, а также Латинскую Америку.На Европу приходится основная доля мирового рынка передовых систем управления транспортными средствами из-за высоких темпов внедрения системы и развития инфраструктуры автомобильного сектора, что привело к увеличению производства автомобилей с системами безопасности, особенно в Германии, Франции и других странах. Великобритания и Испания. В этом регионе основаны основные производители автомобилей, что способствует развитию рынка передовых систем управления транспортными средствами. Внедрение систем безопасности регулирующими органами в регионе также является ключевым фактором, который, по оценкам, будет способствовать развитию рынка передовых систем управления транспортными средствами в течение прогнозируемого периода.
Ключевые игроки, работающие на рынке передовых систем управления транспортными средствами
Мировой рынок передовых систем управления транспортными средствами умеренно консолидирован с присутствием ведущих производителей. Вот несколько ключевых игроков, работающих на мировом рынке передовых систем управления транспортными средствами:
- Роберт Бош ГмбХ
- Continental AG
- Корпорация Денсо
- ZF Friedrichshafen AG
- Wabco
- Delphi
- Autoliv Inc
- Hitachi, Ltd
- Honeywell International Inc.
- TOYODA GOSEI Co., Ltd
Глобальный рынок передовых систем управления транспортными средствами: объем исследования
Глобальный рынок передовых систем управления транспортными средствами, по типам
- Система впрыска топлива
- Контроль детонации
- Антиблокировочная тормозная система
Глобальный рынок передовых систем управления транспортными средствами, по типам транспортных средств
- Легковой автомобиль
- Хэтчбек
- Седан
- Коммунальная машина
- Легкий коммерческий автомобиль
- Автобусы
- Грузовые автомобили
Глобальный рынок передовых систем управления транспортными средствами, по каналам продаж
Глобальный рынок передовых систем управления транспортными средствами, по регионам
- Северная Америка
- Европа
- Германия
- Франция
- U.К.
- Италия
- Испания
- Северный регион
- Остальная Европа
- Азиатско-Тихоокеанский регион
- Китай
- Япония
- Индия
- АСЕАН
- Остальные страны Азиатско-Тихоокеанского региона
- Латинская Америка
- Бразилия
- Мексика
- Остальная часть Латинской Америки
- Ближний Восток и Африка
- GCC
- Южная Африка
- Остальной Ближний Восток и Африка
Это исследование TMR представляет собой всеобъемлющую структуру динамики рынка.В основном он включает критическую оценку пути потребителей или клиентов, текущих и новых направлений деятельности, а также стратегическую основу, позволяющую руководителям по управлению бизнесом принимать эффективные решения.
Нашей ключевой основой является 4-квадрантная структура EIRS, которая предлагает подробную визуализацию четырех элементов:
- Клиент E Карты опыта
- I Наблюдения и инструменты, основанные на исследованиях на основе данных
- Практичность R Результат для удовлетворения всех бизнес-приоритетов
- S трагические рамки для ускорения пути роста
В исследовании предпринята попытка оценить текущие и будущие перспективы роста, неиспользованные возможности, факторы, определяющие их потенциал дохода, а также структуру спроса и потребления на мировом рынке, разбив его на региональную оценку.
Исчерпывающе охвачены следующие региональные сегменты:
- Северная Америка
- Азиатско-Тихоокеанский регион
- Европа
- Латинская Америка
- Ближний Восток и Африка
Структура квадранта EIRS в отчете суммирует наш широкий спектр основанных на данных исследований и рекомендаций для CXO, чтобы помочь им принимать более обоснованные решения для своего бизнеса и оставаться лидерами.
Ниже приведен снимок этих квадрантов.
1. Карта впечатлений клиентов
Исследование предлагает всестороннюю оценку различных поездок клиентов, имеющих отношение к рынку и его сегментам. Он предлагает различные впечатления клиентов о продуктах и использовании услуг. Анализ позволяет более внимательно изучить их болевые точки и опасения в различных точках контакта с клиентами. Решения для консультаций и бизнес-аналитики помогут заинтересованным сторонам, включая CXO, составить карты клиентского опыта, соответствующие их потребностям.Это поможет им нацелиться на повышение взаимодействия клиентов с их брендами.
2. Анализ и инструменты
Различные идеи в исследовании основаны на тщательно продуманных циклах первичных и вторичных исследований, с которыми аналитики участвуют в ходе исследования. Аналитики и советники TMR применяют отраслевые инструменты количественного анализа клиентов и методологии прогнозирования рынка для получения результатов, что делает их надежными.В исследовании предлагаются не только оценки и прогнозы, но и лаконичная оценка этих цифр в динамике рынка. Эти идеи объединяют основанные на данных исследовательские рамки с качественными консультациями для владельцев бизнеса, CXO, политиков и инвесторов. Эти идеи также помогут их клиентам преодолеть свои страхи.
3. Практические результаты
Результаты, представленные в этом исследовании TMR, являются незаменимым руководством для выполнения всех бизнес-приоритетов, в том числе критически важных.Результаты при внедрении показали ощутимые преимущества для заинтересованных сторон и предприятий отрасли в повышении их производительности. Результаты адаптируются к индивидуальной стратегической структуре. Исследование также иллюстрирует некоторые из недавних тематических исследований по решению различных проблем компаниями, с которыми они столкнулись на пути к консолидации.
4. Стратегические рамки
Исследование дает предприятиям и всем, кто интересуется рынком, возможность сформировать широкие стратегические рамки.Это стало более важным, чем когда-либо, учитывая нынешнюю неопределенность из-за COVID-19. В исследовании обсуждаются консультации по преодолению различных подобных прошлых сбоев и предвидятся новые, чтобы повысить готовность. Эти рамки помогают предприятиям планировать свои стратегические согласования для восстановления после таких разрушительных тенденций. Кроме того, аналитики TMR помогут вам разобраться в сложном сценарии и обеспечить отказоустойчивость в неопределенные времена.
Отчет проливает свет на различные аспекты и дает ответы на актуальные вопросы рынка.Вот некоторые из важных:
1. Какие варианты инвестиций могут быть наилучшими при освоении новых продуктов и услуг?
2. К каким ценностным предложениям следует стремиться предприятиям при финансировании новых исследований и разработок?
3. Какие нормативные акты будут наиболее полезны для заинтересованных сторон в расширении их сети цепочки поставок?
4. В каких регионах в ближайшем будущем может наблюдаться рост спроса в определенных сегментах?
5.Каковы одни из лучших стратегий оптимизации затрат с поставщиками, с которыми некоторые хорошо зарекомендовавшие себя игроки добились успеха?
6. Какие ключевые перспективы использует топ-менеджер, чтобы вывести бизнес на новую траекторию роста?
7. Какие правительственные постановления могут поставить под сомнение статус ключевых региональных рынков?
8. Как новые политические и экономические сценарии повлияют на возможности в ключевых областях роста?
9.Каковы некоторые из возможностей получения прибыли в различных сегментах?
10. Что будет препятствием для входа на рынок новых игроков?
Обладая обширным опытом в создании исключительных рыночных отчетов, Transparency Market Research стала одной из надежных компаний по исследованию рынка среди большого числа заинтересованных сторон и CXO.Каждый отчет Transparency Market Research подвергается тщательной исследовательской деятельности во всех аспектах. Исследователи из TMR внимательно следят за рынком и извлекают полезные точки, способствующие росту. Эти моменты помогают заинтересованным сторонам соответствующим образом разрабатывать свои бизнес-планы.
исследователей TMR проводят исчерпывающие качественные и количественные исследования. Это исследование предполагает использование мнений экспертов рынка, сосредоточение внимания на последних разработках и других.Этот метод исследования отличает TMR от других фирм, занимающихся исследованиями рынка.
Вот как Transparency Market Research помогает заинтересованным сторонам и CXO с помощью отчетов:
Внедрение и оценка стратегического сотрудничества: Исследователи TMR анализируют недавние стратегические действия, такие как слияния, поглощения, партнерства, сотрудничества и совместные предприятия. Вся информация собрана и включена в отчет.
Идеальные оценки размера рынка: В отчете анализируются демографические характеристики, потенциал роста и возможности рынка в течение прогнозируемого периода. Этот фактор приводит к оценке размера рынка, а также дает представление о том, как рынок восстановит рост в течение периода оценки.
Инвестиционное исследование: В отчете основное внимание уделяется текущим и предстоящим инвестиционным возможностям на конкретном рынке.Эти события информируют заинтересованные стороны о текущем инвестиционном сценарии на рынке.
Примечание: Несмотря на то, что были приняты меры для поддержания наивысшего уровня точности отчетов TMR, недавним изменениям, связанным с рынком / поставщиком, может потребоваться время, чтобы отразить их в анализе.
Система управления транспортным средством
Автоматизированные дороги или направляющие разделены на контрольные сегменты, охватывающие многие мили.Для петель местного мегаполиса контрольный сегмент может быть длиной направляющей в одном направлении. Для высокоскоростных соединительных направляющих длина контрольного сегмента будет определяться станциями выхода и пересечениями с другими направляющими. Большинство сегментов будет иметь длину 10-50 миль.На пути между станциями каждое транспортное средство принимает, декодирует и отслеживает сигналы скорости и расстояния. оставаясь в виртуальном слоте. Всем автомобилям назначается один и тот же канал сигнала скорости.Когда транспортное средство достигает точки съезда, этому транспортному средству будет назначен новый канал управления скоростью до того, как оно покинет направляющую. У каждого выезжающего транспортного средства есть свой канал скорости, назначенный системой управления выездной станцией. Смотрите примечание.
Нормальная работа, затем отслеживается левая боковая направляющая. Когда транспортное средство должно выехать, точка выхода обнаруживается, и правый боковой датчик выдвигается, чтобы отслеживать правую сторону. После установления контакта правый датчик берет на себя функции рулевого управления, мощности и управления сигналами, а левый датчик частично втягивается в кузов автомобиля.Просто отслеживая правую сторону, автомобиль автоматически выезжает, не затрагивая следующие автомобили. После того, как транспортное средство выезжает из главной направляющей, левый датчик снова выдвигается, чтобы войти в контакт с левой боковой направляющей, а правый боковой датчик втягивается наполовину. Рулевое управление снова отслеживает левую боковую направляющую. Это сделано для того, чтобы выездная станция могла «распределять» автомобили по нескольким парковочным станциям. Каждый раз, когда компьютер станции выбирает разветвленный выход, транспортное средство переключается с левой стороны на правую, а затем снова на левую.Функции выхода и слияния — единственный раз, когда выполняется отслеживание правой стороны.
Уровень 3 Логическое управление:
Третий уровень — это логический уровень, который посредством логики программирования управляет перемещением транспортного средства между виртуальными слотами управления транспортным средством второго уровня. Слот-прыжок — это процесс удаления пустых пространств между транспортными средствами. На высокой скорости это экономит энергию, так как транспортные средства следуют друг за другом без пустых промежутков между ними, что значительно снижает сопротивление воздуха. После того, как определенное количество транспортных средств сформировало цепочку, процесс останавливается, чтобы оставить место для въезда других транспортных средств на направляющую.Количество вагонов в поезде задается системной переменной для настройки процесса.
Функции станции выхода:
Станции выхода имеют различные размеры и пропускную способность для обработки трафика. Станция выхода максимального размера могла бы обрабатывать весь выход направляющей и останавливать каждое транспортное средство. В этом случае единовременно может находиться под контролем станции выезда 50-100 автомобилей. В крайнем случае, когда все автомобили выезжают, до пяти автомобилей одновременно будут выходить вместе и управляться вместе.