Как работают системы предотвращения столкновений
Как работают системы предотвращения столкновений на низких скоростях и почему радары и камеры становятся уже обязательными для многих автопроизводителей? Разбираемся в сути вопроса.
Когда?
Концепт-кар Cadillac Cyclone XP-74, показанный в 1959-м, уже был оснащен передними радарами. Но исследования их реального применения в автомобиле начались только в семидесятых годах, а серийно систему автоматического торможения предложили в 2003 году на Honda Inspire.
Где?
Системы автоматического торможения (AEB, Automatic Emergency Braking) работают всегда. В их основе один или несколько фронтальных датчиков под лобовым стеклом или в переднем бампере. В первой фазе они предупреждают водителя с помощью звуковых и визуальных сигналов о необходимости замедлиться.
Зачем?
Самая распространенная авария – столкновение на низкой скорости. Их число растет из-за того, что водители часто отвлекаются.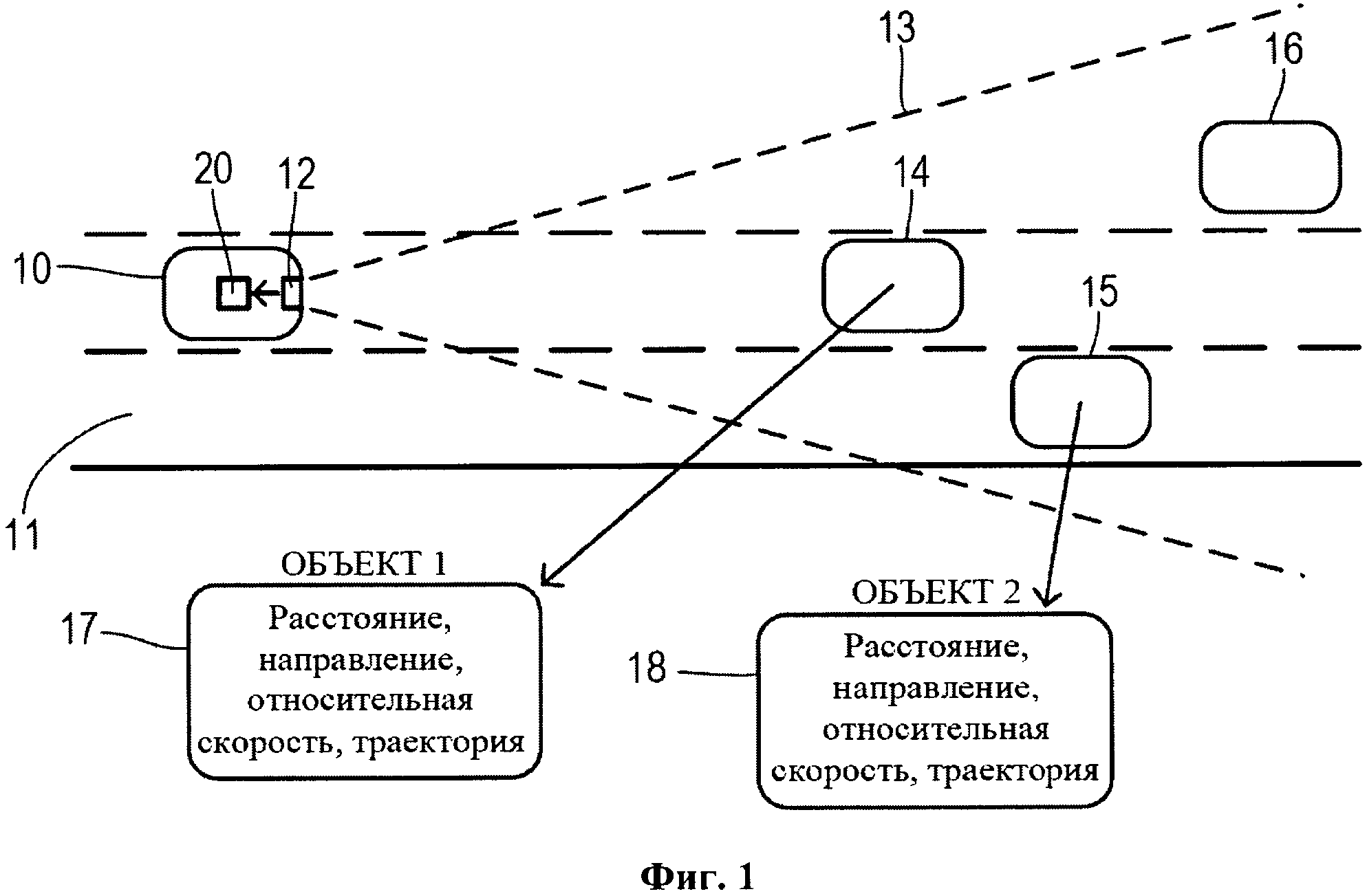
Сколько?
Система автоматического торможения предлагается как в базовом оснащении, так и в качестве отдельной опции или части пакета оснащения, повышающего безопасность.
Как работает?
Системы AEB используют не только стандартную тормозную систему, но и датчики, распознающие транспортные средства и пешеходов перед автомобилем. Электроника определяет относительную скорость и расстояние между машиной и препятствием. При риске столкновения Automatic Emergency Braking предупреждает водителя и задействует преднатяжители ремней безопасности, чтобы повысить их эффективность при неминуемом столкновении.
Влияет на звезды
Наличие на автомобиле системы автономного экстренного торможения прямо влияет на то, какой рейтинг по безопасности ему будет присвоен. Ассоциация по проведению независимых краш-тестов Euro NCAP – самая престижная в мире – оценивает этот параметр еще с 2014 года.
Эксперты Euro NCAP, испытывая новые автомобили, оценивают работу системы автономного торможения «в связке» с функцией предупреждения о возможном фронтальном столкновении. Для этого проводятся тесты сразу по трем разным сценариям: сближение с неподвижным автомобилем на скорости 30–80 км/ч, сближение с автомобилем, движущимся впереди с меньшей скоростью, и движение за автомобилем, который внезапно начинает тормозить. Последний сценарий подразумевает скорость в 50 км/ч и два теста с плавным и резким торможением. Высокие оценки Euro NCAP получают те системы, которые смогли в таких условиях или полностью предотвратить столкновение, или обеспечить незначительность повреждений.
Підпишіться на наш Telegram-канал або читайте нас в Google News, щоб нічого не пропустити.
Часть 1. Законодательство как ТЗ для разработчика / Хабр
Приветствую Хаброюзеры. Меня зовут Евгений и в серии статей я хочу рассказать о процессе разработки и тестирования системы предотвращения столкновений промышленной техники и людей, работающих с ней бок о бок.
Но сначала небольшая история. Один северный город нашей необъятной. В городе есть большая шахта, которая по сути является для жителей города основным местом работы. Пятница, рабочий день уже перешел в послеобеденное время. Горнорабочие на горизонте 720 метров отпраздновали день рождение коллеги распитием алкоголя, пронесенного на территорию объекта тайно. И вот один захмелевший горняк пошел проветриться перед выходом на поверхность, но в процессе немного устал и задремал на рельсах подземной железной дороги для вывоза руды. Разбудил его электровоз, машинист которого в темноте не заметил неудачливого горняка, дремавшего у рельса.
Предыстория вопроса, побудившая нас заняться разработкой такой системы в 2016 году такова. Горная добыча полезных ископаемых является одной из самых опасных профессий в мире. А в нашей стране это одна из ключевых отраслей экономики после добычи нефти и газа. Добыча полезных ископаемых во всем мире ведется двумя способами: открытым (поверхностным) и подземным.
Мы, как разработчик систем позиционирования достаточно давно занимаемся позиционированием горнорабочих в шахтах и в настоящее время практически на всех шахтах вопрос позиционирования в той или иной степени решен. Но инциденты, связанные со столкновениями горной техники и наездами техники на персонал к сожалению, продолжают происходить. На западе данный вопрос начал решаться еще в 2006-2010 годах разработкой и внедрением систем предотвращения столкновений. В первую очередь там внедрялись такие системы на карьерах, так как там чаще происходили подобные инциденты. С марта 2019 года и в России стала обязательна установка систем предотвращения столкновений, но только не на карьерах, а в шахтах. И вот тут мы подходим собственно к ТЗ и запросу на подобные системы.
На западе данный вопрос начал решаться еще в 2006-2010 годах разработкой и внедрением систем предотвращения столкновений. В первую очередь там внедрялись такие системы на карьерах, так как там чаще происходили подобные инциденты. С марта 2019 года и в России стала обязательна установка систем предотвращения столкновений, но только не на карьерах, а в шахтах. И вот тут мы подходим собственно к ТЗ и запросу на подобные системы.
Все горнодобывающие предприятия в России обязаны соблюдать правила промышленной безопасности. Следит за соблюдением этих правил Ростехнадзор (Федеральная служба по экологическому, технологическому и атомному надзору) и мы в первую очередь учитывали требования выдвигаемые данной службой при разработке системы. Но так как требования к системам предотвращения столкновений в нашей стране прописаны пока что достаточно общими словами, в составлении ТЗ для разработки, сценариев тестирования и критериев приемки мы опирались на международный документ, разработанный EMESRT (Earth Moving Equipment Safety Round Table).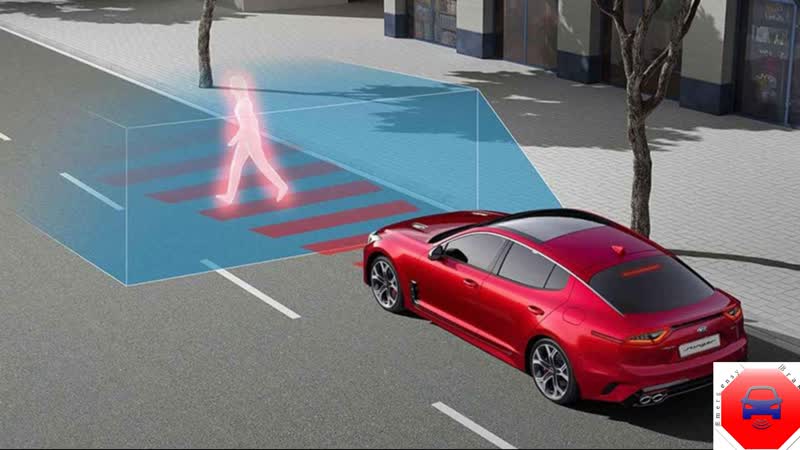 Это организация объединяющая горнодобывающие компании, государственные структуры, производителей оборудования для горной добычи, сервисные и инжиниринговые компании по всему миру.
Это организация объединяющая горнодобывающие компании, государственные структуры, производителей оборудования для горной добычи, сервисные и инжиниринговые компании по всему миру.
Данная организация разработала классификацию систем управления и безопасности для горной добычи:
- Уровень 7 — Осведомленность оператора
Технологии, которые предоставляют информацию для повышения способности оператора наблюдать и понять потенциальные опасности в непосредственной близости от оборудования. - Уровень 8 — Консультативный контроль
Технологии, которые предоставляют сигналы тревоги и / или инструкции для повышения способности оператора предсказать потенциальное небезопасное действие и необходимые корректирующие действия. - Уровень 9 — Контроль вмешательства
Технологии, которые автоматически вмешиваются и принимают некоторую форму управления оборудованием для предотвращения или снижения последствий опасной ситуации.

За основу разработки системы и программу последующих тестов и сценариев тестирования был взят документ Vehicle Interaction Systems, в котором прописаны основные сценарии и ситуации возникающие при работе техники и людей в горной добыче и возможные инциденты с ними.
При разработке системы для горной техники нужно исключить следующие опасные ситуации или свести вред от них к минимуму (минимизация последствий инцидента):
- Травма из-за дизайна рабочей станции и внешних конструкций
- Травма или госпитализация, полученная в следствии физической и/или умственной усталости
- Вред от нарушения видимости (включая искаженную или ухудшенную видимость) или нарушения осведомленности об опасностях в различных условиях эксплуатации
- Вред от ограниченного или затрудненного обзора оператором окружающей среды и работы рабочего инструмента
- Вред от столкновений, вызванный движением людей и транспортных средств, в слепой зоне видимости оператора
- Вред от потери устойчивости машины во время работы, перемещения, сочленения
- Вред от неправильного использования средств управления оборудованием, неправильной / неточной калибровки или неэффективного обслуживания из-за плохо разработанных элементов управления и дисплеев
- Вред от неправильного толкования информации на дисплеях или табличках
- Вред, в том числе умственная перегрузка, от пропущенных предупреждений и сигналов тревоги, которые игнорируются или их не слышно
В них заложены требования, как к самой системе, так и к виду устройств, визуализации уведомлений и способам оповещений.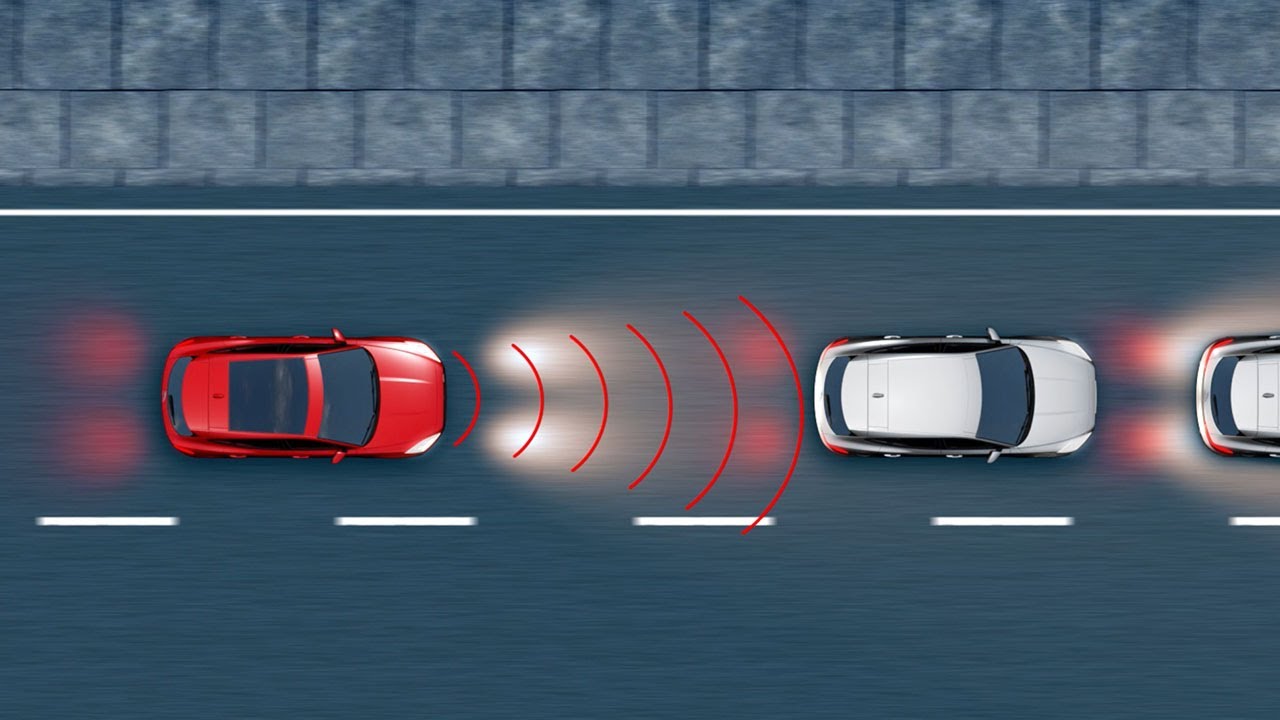
Согласитесь, гораздо больше требований к системам предотвращения столкновений, чем в российской редакции правил промышленной безопасности для горнодобывающих компаний (Приказ от 11 декабря 2013 г. №599 Об утверждении федеральных норм и правил в области промышленной безопасности «Правила безопасности при ведении горных работ и переработке твердых полезных ископаемых»
Пункт: 325 Транспортные машины, эксплуатируемые на шахтах по добыче полезных ископаемых, должны быть оборудованы системами предотвращения столкновений. Система предотвращения столкновений должна обеспечивать своевременное оповещение машиниста о наличии людей и транспортных средств в радиусе траектории движения машины.
Именно гораздо больший список изначальных требований к системе предотвращения столкновений описанный EMESRT и учет этих требований при разработке продукта позволит соответствовать всем существующим и новым требованиям, которые возможно будут добавлены в соответствующие документы и регламенты для Российских горнодобывающих предприятий в будущем.
Так мы подошли к ключевым сценариям работы техники и людей, при которых система предотвращения столкновений должна определять опасность и предупреждать о ней всех участников такой ситуации.
Список сценариев для горной добычи:
- P1-Человек находится непосредственно рядом с машиной
- P3-Человек находится под наблюдением при работе с машиной и оборудованием
- P4-Человек садится в кабину или выходит из нее
- L1-Лобовое сближение со стоячей машиной
- L2-Сближение машины при движении обратным ходом со стоячей машиной
- L3-Сближение 2х машин при движении каждой обратным ходом
- L4-Сближение 2х машин при движении одна за одной
- L5-Разъезд двух машин, двигающихся навстречу друг другу
- L6-Две машины двигаются назад, при этом одна машина обгоняет другую
- L7-Сближение 2х движущихся машин и обгон одной из них
- L8-Сближение в условиях нулевой видимости
- C1-Сближение 2х машин на встречу друг другу при движении по изгибу дороги при недостаточной видимости
- C3-Сближение машины, двигающейся вперед с машиной, двигающейся назад в условиях изгиба дороги при недостаточной видимости
- T1-Сближение 2х машин, двигающихся в одном направлении на перекрестке
- T2-Сближение 2х машин навстречу друг другу при намерении повернуть на перекрестке одной из машин
- T3-Сближение 2х машин, двигающихся в одном направлении на Т-образном перекрестке под углом 90 градусов
- T4-Сближение 2х машин, двигающихся в одном направлении на пересечении 2х технологических дорог
- R1-Машина с вращающимся рабочим инструментом работает рядом с другой машиной
- R2-Машина перегружает материалы на другую машину
- O1-Машина сближается с неподвижной конструкцией, стеной или стационарным оборудованием
- V1-Мажина въезжает в запрещенную зону, где запрещено движение
- V4-Машина движется без управления оператора
- V6-Машина движется по территории, где находится большое количество других машин и людей, например, мастерская
Всего 24 сценария, которые охватывают 99% всех типовых задач, решаемых при подземной добыче полезных ископаемых, где используется самоходная техника, транспорт и могут находиться люди.
Дальше я расскажу, как мы выбирали технологии для разработки продукта, через что пришлось пройти при его создании и что получилось на выходе, а также как тестировался каждый из сценариев, описанных выше.
Технологии и решения для создания системы предотвращения столкновений
Мы с 2016 года занимаемся разработкой подобных систем предотвращения столкновений, и Вы можете почитать об этом в стате на Хабре здесь.
в 2016 выглядело это как то такЗа это время мы сменили технологию с устаревшей на тот момент технологии Nanoloc на более перспективную технологию UWB. Подробнее о технологии UWB мы писали на Хабре тут и тут.
В чем преимущество технологии UWB (СШП) для позиционирования объектов?
- Высокая точность позиционирования: до 10 см.
- Устойчивость к отражениям радиосигналов в условиях прямой видимости.
К 2018 году на основе технологии UWB была разработана и прошла несколько стадий развития система предотвращения столкновений.
» alt=«image»/>
Одна из стадий тестирования нового корпуса антенныКорпус антенны отливается из сверхпрочного полимера зеленого цвета. Цвет подбирали исходя из того, что он не должен встречаться в в среде, где будет использоваться система.
Сейчас система состоит из следующих компонентов:
Тег (TAG) – микросхема с поддержкой технологии UWB, встроенная в фонарь шахтера или выполненное на её базе отдельное устройство.
Антенна (VBU) – устанавливается на обшивку транспортного средства. В ней находится также чип UWB, который и определяет расстояние до другого чипа UWB по ToF (Time of Flight).
Контрольный блок (VCU) – микрокомпьютер, обрабатывает полученные замеры от антенн и по математическому алгоритму определяет местоположение тега относительно транспортного средства и отправляет данные для визуализации на дисплей водителя.
Дисплей (VOD) – осуществляет визуальное представление информации о местоположении тегов относительно автомобиля.
В основе UWB технологии позиционирования лежит чип ирландской компании Decawave. Чипы имеют собственную антенну, благодаря которой могут измерять время прохождения сигнала между собой. Так как в VBU находится такой же чип UWB, как и в тегах, то они детектируют друг друга при наличии радиовидимости и тоже производят замеры между собой. Этот принцип позволяет определять время пролета сигнала, как между антеннами транспортных средств, так между антенной и тегом.
Отсюда мы получаем два направления контроля:
- транспорт-транспорт (Vehicle to Vehicle или V2V)
- транспорт-человек (Vehicle to Personnel, V2P)
Принцип работы системы
В основе системы лежит принцип создания вокруг транспортного средства 3-х зон контроля опасных сближений. При этом зоны могут быть любой формы и учитывать, как особенности конструкции, так и параметры движения транспортного средства.
Зона «Внимание»
Предупреждает работников о наличии транспорта, техники и пр. на малом расстоянии.
Система сигнализирует о возможном опасном сближении и позволяет обратить внимание водителя и горнорабочего на факт сближения с другим объектом.
Антенны (VBU) излучают в пространство вокруг транспортного средства UWB сигнал в поиске других антенн (VBU) или персональных тегов (TAG) в зоне радиовидимости.
При обнаружении других антенн (VBU) или персонального тега (TAG) в зоне «Внимание» производится замер расстояния от антенны (VBU) до объекта.
Данные о замерах расстояния передаются в контрольный блок (VCU), где производится расчёт местоположения обнаруженных объектов на дальности, направлению и зоне.
Результат расчёта выводится на дисплей водителя (VOD).
Зона «Опасность»
Фиксирует опасное сближение и привлекает внимание работников, может замедлять технику и транспорт.
Система оповещает о возможной аварии и позволяет обратить внимание водителя и горнорабочего на факт сближения с другим объектом.
Водитель видит на дисплее (VOD), в какой зоне находится обнаруженный объект и при его приближении к транспортному средству объект будет перемещаться из зоны «Внимание» в зону «Опасность» на дисплее (VOD). При этом в кабине появится световое и звуковое оповещение (VOD) о входе объекта в зону «Опасность», как в кабине водителя, так и с наружной части транспортного средства будут включены проблесковые маяки и звуковое оповещение. При этом на персональном теге сотрудника (TAG) или в кабине другого транспортного средства, оснащенного продуктом «RealTrac Предотвращение столкновений» также включится звуковое и светографическое оповещение.
Зона «Опасность» на дисплееЗона «Авария»
Генерирует сигнал тревоги при входе другого объекта, оснащенного системой в зону Авария.
При входе объекта из зоны «Опасность» в зону «Авария» включаются все способы оповещения водителя транспортного средства. На дисплее водителя (VOD) горит красный сигнал опасности и звучит постоянное звуковое оповещение. На персональном теге горнорабочего (TAG) также включается звуковое оповещение и вибрация, оповещающая о нахождении в зоне «Авария».
На персональном теге горнорабочего (TAG) также включается звуковое оповещение и вибрация, оповещающая о нахождении в зоне «Авария».
Вот так выглядят зоны контроля в конфигураторе системы предотвращения столкновений. Видны точки установки антенн на транспортном средстве и тег установленный на другое ТС. Шаг сетки 1 м.
Это принцип работы системы, описанный в теории. Как все это выглядит на практике я расскажу во второй части статьи через неделю.
Если у Вас есть вопросы пишите в комментариях.
Система предотвращения столкновения — можно установить в автосервисе
Последние десятилетия отмечены значительным ростом числа автомобилей на дорогах всего мира. Однако, увеличение в связи с этим количества дорожно-транспортных происшествий происходит отнюдь не повсеместно.
В странах ЕС правительство ограничивает объёмы потока транспортных средств в мегаполисах различными фискальными мерами. Соблюдению правил дорожного движения уделяется пристальное внимание.
Дорожное покрытие соответствует международным стандартам. Общая организация движения машин исключает регулярное возникновение аварийных ситуаций.
Российские автолюбители и профессиональные водители привыкли ездить совершенно в других условиях. Огромное количество транспорта на городских улицах затрудняет движение и приводит к возникновению автомобильных пробок. Вялотекущий поток машин забивает перекрёстки. На запрещающий сигнал светофора выезжают машины и, не имея возможности двигаться дальше, остаются на пересечении дорог. Плотное движение не позволяет двигаться равномерно. Опаздывающий водитель вырывается из потока машин и развивает непозволительно высокую скорость, пытаясь компенсировать потерянное время.
Перечень услуг автосервиса постоянно расширяется
В этой ситуации нарушаются элементарные правила дорожного движения. Столкновения автомобилей перестали быть редкостью. Даже в результате небольшой аварии машина получает повреждения кузова, его лакокрасочного покрытия и смонтированной на поверхности транспортного средства арматуры. Качественное устранение дефектов возможно только в условиях автосервиса. Однако современное обслуживание предполагает не только ремонт внешних повреждений автомобиля, но и предоставление дополнительных возможностей для предупреждения аварии.
Качественное устранение дефектов возможно только в условиях автосервиса. Однако современное обслуживание предполагает не только ремонт внешних повреждений автомобиля, но и предоставление дополнительных возможностей для предупреждения аварии.
Оказывая услуги по обслуживанию кузова и ремонту его элементов, автосервис традиционно решает задачи устранения последствий дорожно-транспортного происшествия. При этом в цехах автопроизводителей в конструкцию машин регулярно добавляются новые системы, позволяющие максимально обезопасить их эксплуатацию.
Как правило, на автомобили эконом-класса это не распространяется. Заводской конвейер такие машины покидают «пустыми». В этом случае только автосервис способен оснастить транспортное средство дополнительными системами предупреждения столкновений не только в период предпродажной подготовки, но и во время активного использования автомобиля в рамках дополнительных услуг по тюнингу.
Новые системы безопасности могут предотвратить столкновение автомобилей, снижая вероятность возникновения удара с механическим препятствием или с другим транспортным средством.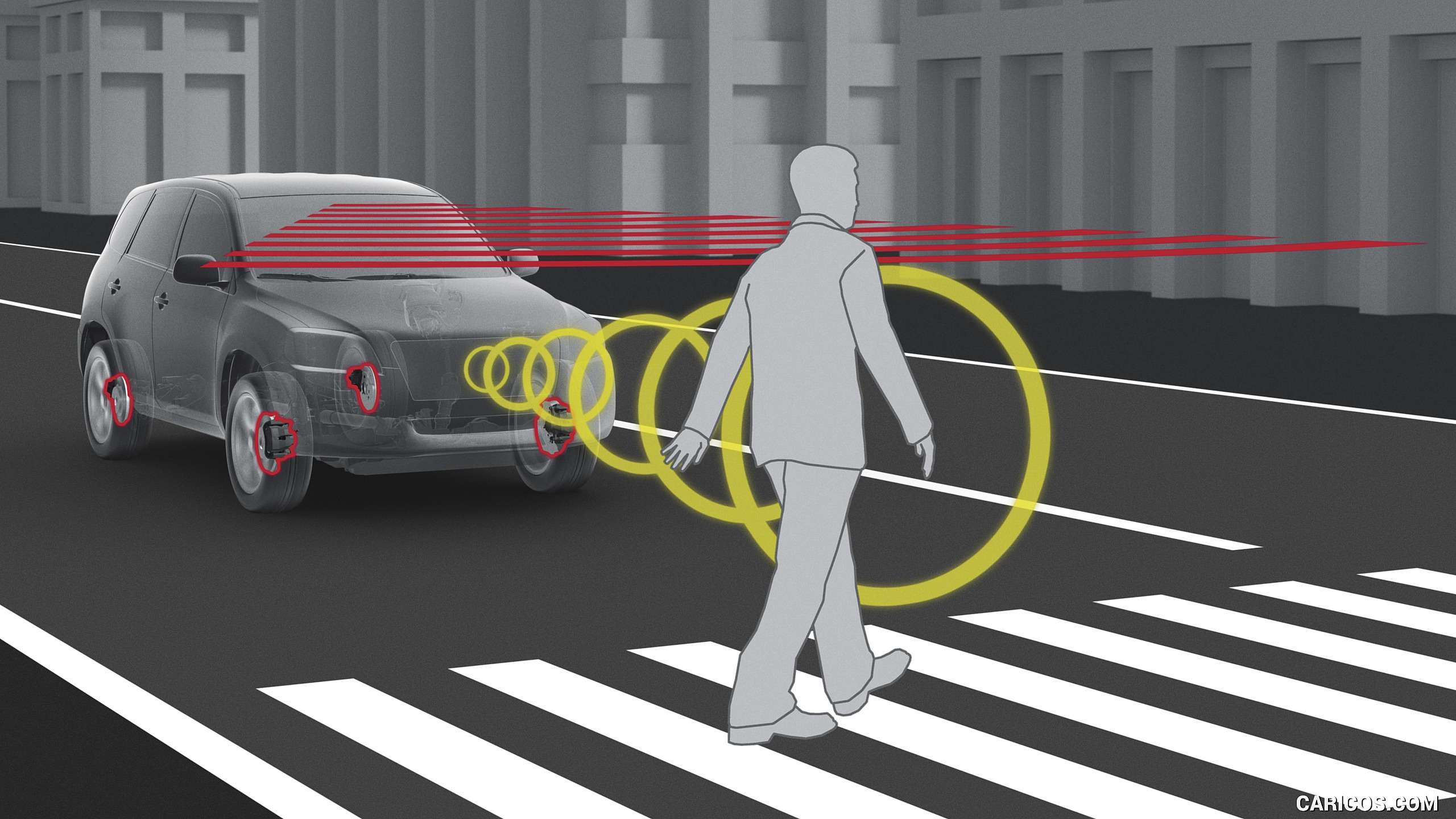 При правильной эксплуатации системы возникновение ДТП исключается. Большую помощь данные разработки оказывают при выполнении водителем манёвров на ограниченном пространстве, когда затруднительно определить реальное расстояние до препятствия.
При правильной эксплуатации системы возникновение ДТП исключается. Большую помощь данные разработки оказывают при выполнении водителем манёвров на ограниченном пространстве, когда затруднительно определить реальное расстояние до препятствия.
Система предотвращения столкновения транспортных средств, как работает
Если на автомобиле отсутствуют системы предупреждения столкновений, но они предусмотрены конструкцией автопроизводителя, то в рамках предпродажной подготовки и в специальных тюнинговых ателье можно заказать данную услугу. В настоящее время большое распространение получают парковочные системы, выполненные на базе малогабаритных видеокамер.
- Вспомогательная видеокамера. На дисплее системы PAS выводится изображение объектов, расположенных позади автомобиля. Это устройство облегчает парковку. Дисплей HLDF показывает линии, которые соответствуют расстоянию от автомобиля 0,3 и 1,5 метра. Данные линии являются вспомогательными и позволяют водителю сориентироваться при оценке расположения автомобиля. Опция PAS устанавливается как дополнительное оборудование при наличии на автомобиле навигационной системы.
- PAS (Parking Assis-tance System) с модулем PAM – помощь при парковке. Датчики PAS расположены впереди и сзади машины и определяют расстояние до ближайших объектов. Управляет работой датчиков модуль PAM. При работе PAM сообщает о состоянии системы (вкл., выкл.) на дисплей ICM. ICM идентифицирует сигнал о приближении препятствий спереди или сзади. Постоянный тон сигнала соответствует расстоянию от автомобиля до объекта менее 0,3 метра. Прерывистый сигнал свидетельствует об увеличении расстояния до 0,8 метра.
- Система вспомогательного торможения. Наиболее распространённый вид ДТП – наезд сзади. Недостаток внимания водителя снижается и как следствие, сразу приводит к возникновению аварийной ситуации. Volvo Cars представила инновационную технологию вспомогательного торможения. Она основана на действии вспомогательных функций, позволяющих снизить вероятность наезда на движущееся впереди транспортное средство. Специальный радар контролирует зону перед автомобилем и активирует всю систему предупредительным красным светом и звуковым сигналом, если возникает критическая ситуация. Если водитель не реагирует или не успевает принять экстренные меры, то включается система автоматического торможения. При этом тормозные колодки прижимаются к тормозным дискам. Одновременно подаются предупреждающие сигналы для водителя транспортного средства, следующего позади. Данная система предполагает три варианта настройки в зависимости от индивидуального стиля вождения.
- Адаптивный круиз контроль предназначен для поддержания безопасного расстояния до следующего впереди автомобиля. Часто данное устройство рассматривается только для повышения уровня комфорта при вождении. Однако движение в потоке машин с неравномерной скоростью с адаптивным круиз контролем будет более уверенным. При помощи радара данная система автоматически контролирует расстояние до впереди идущего автомобиля, путём регулирования скорости движения транспортного средства.
- Инновационные системы BLIZ, IDIS. BLIZ (Blind Spot Information System) подаёт сигналы водителю о появлении в мёртвой зоне видимости других транспортных средств. Работает на основе видеокамер, которые встроены на внешних зеркалах. IDIS разработана для оценки критической ситуации. Она контролирует вращение рулевого колеса, движение педалей газа и тормоза, применение сигналов поворота. В случае возникновения нестандартных действий водителя, система IDIS блокирует входящие звонки на мобильный телефон или сигналы о поступлении СМС. Таким образом, она не позволяет водителю отвлекаться на внешние раздражители.
 Опция PAS устанавливается как дополнительное оборудование при наличии на автомобиле навигационной системы.
Опция PAS устанавливается как дополнительное оборудование при наличии на автомобиле навигационной системы. Специальный радар контролирует зону перед автомобилем и активирует всю систему предупредительным красным светом и звуковым сигналом, если возникает критическая ситуация. Если водитель не реагирует или не успевает принять экстренные меры, то включается система автоматического торможения. При этом тормозные колодки прижимаются к тормозным дискам. Одновременно подаются предупреждающие сигналы для водителя транспортного средства, следующего позади. Данная система предполагает три варианта настройки в зависимости от индивидуального стиля вождения.
Специальный радар контролирует зону перед автомобилем и активирует всю систему предупредительным красным светом и звуковым сигналом, если возникает критическая ситуация. Если водитель не реагирует или не успевает принять экстренные меры, то включается система автоматического торможения. При этом тормозные колодки прижимаются к тормозным дискам. Одновременно подаются предупреждающие сигналы для водителя транспортного средства, следующего позади. Данная система предполагает три варианта настройки в зависимости от индивидуального стиля вождения.
Выводы
Научная революция давно шагнула за пределы фантастики. Человек не успевает удивляться последним инновационным идеям, тем более отслеживать новейшие разработки в различных отраслях науки и техники, в том числе и в мире транспорта. Электронные системы, которые призваны снизить количество аварийных ситуаций, являются полезными конструкторскими решениями автопроизводителей.
Система предотвращения столкновения Toyota Safety Sense
Поиск запроса «система предотвращения столкновения» по информационным материалам и форуму
Специалисты IIHS проверили системы предотвращения аварий — ДРАЙВ
В новых испытаниях водитель направляет машину на неподвижную мягкую мишень, имитирующую заднюю часть автомобиля, и сам не предпринимает никаких попыток торможения. Специальные направляющие на асфальте удерживают мишень от смещения до удара. Скорость и замедление автомобиля замеряется по GPS.
Американский Страховой институт безопасности на дорогах (IIHS) провёл первую серию тестов систем предупреждения о возможном столкновении и систем автоматического торможения. Была разработана стандартная методика выставления баллов с двумя видами испытаний: на скорости 19,3 и 40,2 км/ч. Первый случай моделирует движение в плотном городском трафике, второй — на шоссе. Исследования показали, что даже сорока километров в час хватает для прогнозирования эффективности такой системы и при более высокой скорости. Но зато на 40 км/ч тест менее рискован для водителя и самого автомобиля.
Была разработана стандартная методика выставления баллов с двумя видами испытаний: на скорости 19,3 и 40,2 км/ч. Первый случай моделирует движение в плотном городском трафике, второй — на шоссе. Исследования показали, что даже сорока километров в час хватает для прогнозирования эффективности такой системы и при более высокой скорости. Но зато на 40 км/ч тест менее рискован для водителя и самого автомобиля.
Организация Euro NCAP внедрила стандартные испытания систем автоматического торможения одновременно с IIHS (в сообщении говорится об очень похожей методике у двух организаций) и даже начала проводить тесты моделей, продающихся в Европе. Но первые результаты Euro NCAP обещает опубликовать только 29 октября.
Эксперты IIHS измерили время срабатывания системы, а также степень замедления и то, сумел ли тестируемый автомобиль избежать столкновения. Даже если удар произошёл, важна была скорость в момент касания мишени (так оценивается тяжесть последствий). В окончательном рейтинге учитывалось присутствие системы, сигнализирующей о риске столкновения. Ведь в некоторых моделях есть функция автоматического торможения, но оно срабатывает без выдачи сигналов водителю, а в некоторых легковушках, наоборот, комплектация предусматривает только предупреждение водителя об опасном сближении, но без возможности автономной остановки.
Даже если удар произошёл, важна была скорость в момент касания мишени (так оценивается тяжесть последствий). В окончательном рейтинге учитывалось присутствие системы, сигнализирующей о риске столкновения. Ведь в некоторых моделях есть функция автоматического торможения, но оно срабатывает без выдачи сигналов водителю, а в некоторых легковушках, наоборот, комплектация предусматривает только предупреждение водителя об опасном сближении, но без возможности автономной остановки.
Забегая вперёд, отметим, что в лидеры, по результатам всех проверок электронных систем предотвращения столкновений, вышли модели Субару.
За присутствие лишь одной сигнализирующей системы, но обязательно удовлетворяющей критериям эффективности от Национального управления по дорожной безопасности США (NHTSA), институт IIHS выдавал модели один балл. За работу автономного торможения можно было получить дополнительно от нуля до пяти баллов в зависимости от действенности такой электроники (то есть степени замедления машины перед ударом). Модели с одним суммарным баллом по новой методике зарабатывают так называемый базовый рейтинг, набравшие от 2 до 4 баллов — передовой, а если число баллов равно 5 либо 6, автомобиль получает рейтинг, называемый высшим.
Модели с одним суммарным баллом по новой методике зарабатывают так называемый базовый рейтинг, набравшие от 2 до 4 баллов — передовой, а если число баллов равно 5 либо 6, автомобиль получает рейтинг, называемый высшим.
Американцы проверили 74 модели 2013–2014 годов. Если системы безопасности были опциональными, то испытания проходили разные комплектации, каждая получала свой рейтинг. Из всех машин только семь получили высшую оценку по новой методике. Это седан Cadillac ATS и кроссовер Cadillac SRX (с установленными системами Forward Collision Alert и Automatic Collision Preparation), седан Mercedes-Benz C-класса (Distronic Plus и Pre-Safe Brake), седан Subaru Legacy и универсал Subaru Outback (система EyeSight), седан Volvo S60 и кроссовер Volvo XC60 (при условии оснащения их полным набором из систем City Safety, Collision Warning, Full Auto Brake, Pedestrian Detection).
Дэвид Зуби, старший научный сотрудник IIHS, рассказывает, что 7 машин из 74 получили высший рейтинг, 6 — передовой и 25 — базовый.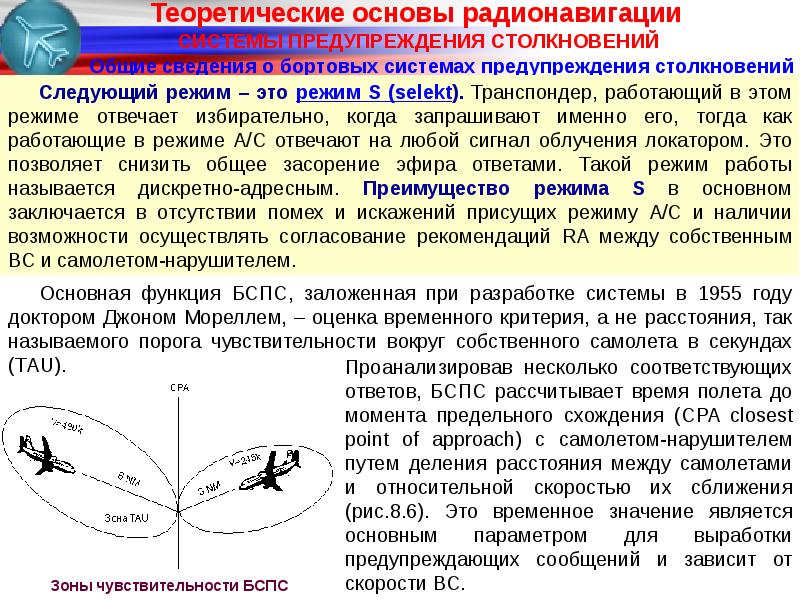 А ещё 36 моделей либо не предлагают системы предотвращения столкновения с впереди идущим транспортом, либо у них есть такая система, но она не соответствует критериям NHTSA или IIHS, так что эти машины даже базовый рейтинг получить не сумели.
А ещё 36 моделей либо не предлагают системы предотвращения столкновения с впереди идущим транспортом, либо у них есть такая система, но она не соответствует критериям NHTSA или IIHS, так что эти машины даже базовый рейтинг получить не сумели.
Особенно американцы похвалили систему EyeSight на моделях Subaru. Она позволила обеим машинам Субару в данном тесте полностью избежать наезда в обоих типах испытаний. И это были единственные машины, справившиеся с двумя заданиями без помарок, и единственные, получившие максимальные 6 баллов по результатам всех тестов. На второе место среди своих подопечных эксперты поставили комплекс Automatic Collision Preparation на Кадиллаках. Обе машины этой марки избежали удара при испытании на скорости 19 км/ч, а при тесте с начальной скоростью 40 км/ч ATS успел перед столкновением сбросить её на 24 км/ч, а SRX — на 31 км/ч.
А вот середняки теста с рейтингом «Передовой» и числом баллов 2 или 3 (4 балла не получил вообще никто): Acura MDX (с системами Forward Collision Warning, Collision Mitgation Brake System), Audi A4 и Audi Q5 (с комплектом Audi pre sense front), Jeep Grand Cherokee (системы Forward Collision Warning и Crash Mitigation), Lexus ES (Pre-Collision System), Mazda6 (Smart City Brake Support). Кроме того, уже упоминавшиеся модели Volvo S60 и Volvo XC60 попадают в данную категорию, если оснащены только одной базовой системой City Safety.
Кроме того, уже упоминавшиеся модели Volvo S60 и Volvo XC60 попадают в данную категорию, если оснащены только одной базовой системой City Safety.Другие модели с функцией автоматического торможения снижали скорость куда менее значительно и порой столь слабо, что даже не сумели выбраться из границ базового рейтинга с одним итоговым баллом. Среди таких провалившихся: Chevrolet Malibu, BMW третьей серии и X3, Honda Accord и Crosstour, Ford Explorer и Fusion, Infiniti JX.
Электронный ассистент Multi Collision Brake
Multi Collision Brake: принцип работы и особенности системы экстренного торможения для предотвращения повторных столкновений. Автомобили Volkswagen считаются одними из самых комфортных и безопасны.
Столь высокий уровень защищенности пассажиров и водителя обусловлен наличием специального компонента безопасности — Multi Collision Brake, или система экстренного/аварийного торможения для предотвращения вторичных столкновений. Статистика гласит, что именно по его вине на дорогах России происходит около 20% аварий.
Статистика гласит, что именно по его вине на дорогах России происходит около 20% аварий.
Вторичное столкновение: причины и следствия
Вторичное столкновение легкового автомобиля происходит в результате потери управления после столкновения транспортного средства с другой машиной или препятствием на пути. Каждое 5 ДТП проходит именно по такому сценарию. В аварийных ситуациях срабатывает человеческий фактор — водитель не успевает затормозить (не жмет на педаль тормоза). Это приводит к вторичному столкновению.
Сегодня системой «Multi Collision Brake» снабжаются транспортные средства Volcswagen Golf, Passat B8, Passat СС, Tiguan, Jetta, Touareg.
Система Multi Collision Brake (MCB) разработана таким образом, чтобы избежать повторного контакта. Тесты компонента безопасности показали, что при серьезных ДТП, когда избежать повторного столкновения не удается, MCB в автомобилях Volkswagen минимизирует последствия.
Какими особенностями MCB?
Сегодня компания Volkswagen снабжает свою технику инновационной разработкой в сфере безопасности — системой Multi Collision Brake. Она настроена на автоматическое срабатывание в момент возникновения ДТП. Даже если водитель не успел/не смог среагировать на ситуацию и не нажал на тормоз, система MCB все равно сработает.
Она настроена на автоматическое срабатывание в момент возникновения ДТП. Даже если водитель не успел/не смог среагировать на ситуацию и не нажал на тормоз, система MCB все равно сработает.
Ее присутствие в составе прочих компонентов безопасности транспортных средств Volkswagen позволяет предупредить последующий наезд на находящиеся поблизости машины.
Как работает электронный помощник?
MCB — подвид экстренного торможения во избежание повторных столкновений . Она связана с датчиками столкновений и разработана на основе следующих систем:
- пассивная безопасность;
- курсовая устойчивость.
Если два независимых датчика регистрируют удар, то это приводит к экстренному срабатыванию (автоматическое, без вмешательства водителя) MCB. Принцип работы всех компонентов системы крайне прост. Бортовые датчики фиксируют столкновение (удар о корпус).
Затем передают сигнал по бортовой сети на электронную панель системы курсовой устойчивости (СКУ). Она на прием сигналов от датчиков реагирует стабилизацией движения. Если Мульти Колижн Брейк фиксирует более двух ударов, то СКУ автоматически выполняет торможение машины.
Она на прием сигналов от датчиков реагирует стабилизацией движения. Если Мульти Колижн Брейк фиксирует более двух ударов, то СКУ автоматически выполняет торможение машины.
Однако тормоз не срабатывает резко. СКУ после стабилизации движения постепенно сбрасывает скорость авто до 10 км/ч. При такой скорости транспортного средства водитель с легкостью может избежать повторных столкновений, самостоятельно контролирую ситуацию на дороге.
То есть: при возникновении ДТП и срабатывании MCB водитель начинает контролировать автомобиль в момент, когда выполняет экстренное нажатие на тормоз (активно жмет педаль). Эта особенность является важной характеристикой аварийной системы MCB на автомобилях Volkswagen.
НОВАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНОСТИ СТОЛКНОВЕНИЯ С ФУНКЦИЕЙ АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ ПОЗВОЛЯЕТ ПРЕДОТВРАТИТЬ НАЕЗД НА ВПЕРЕДИ ИДУЩИЙ АВТОМОБИЛЬ
НОВАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНОСТИ СТОЛКНОВЕНИЯ С ФУНКЦИЕЙ АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ ПОЗВОЛЯЕТ ПРЕДОТВРАТИТЬ
НАЕЗД НА ВПЕРЕДИ ИДУЩИЙ АВТОМОБИЛЬ
- Система предупреждения об опасности столкновения с функцией автоматического торможения обеспечивает автоматическое торможение, когда наезд на впереди идущий автомобиль становится неизбежным
- Адаптивный круиз контроль и Система оповещения о сокращении дистанции помогают водителю удерживать требуемую дистанцию до впереди идущего автомобиля
Volvo Cars продолжает работы по созданию технологий, способных предотвратить такие столкновения, как наезд сзади. Volvo Cars предлагает Систему предупреждения об опасности столкновения с функцией автоматического торможения — это усовершенствованная система предупреждения водителя, благодаря которой автомобиль может самостоятельно активировать торможение, если водитель не реагирует на опасное приближение к впереди идущему или неподвижно стоящему автомобилю.
Volvo Cars предлагает Систему предупреждения об опасности столкновения с функцией автоматического торможения — это усовершенствованная система предупреждения водителя, благодаря которой автомобиль может самостоятельно активировать торможение, если водитель не реагирует на опасное приближение к впереди идущему или неподвижно стоящему автомобилю.
«В результате действия этих систем вместо серьезных травм люди, сидящие в обоих автомобилях, могут испытать лишь незначительные ушибы», — говорит Ингрид Скогсмо (Ingrid Skogsmo), Директор Центра по Безопасности Volvo Cars.
Новая система будет устанавливаться на моделях Volvo S80, V70 и XC70 уже в конце 2007.
Наезд сзади — это третий по количеству вид дорожно-транспортных происшествий. Более чем в 50 процентах случаев водитель даже не успевает нажать на педаль тормоза.
Новая Система предупреждения об опасности столкновения с функцией автоматического торможения (CWAB) сначала предупреждает водители и подготавливает тормозную систему для экстренного торможения. Тормозная система автоматически приводится в действие, если водитель не реагирует на ситуацию, когда наезд на впереди идущий или стоящий автомобиль становится неизбежным.
Тормозная система автоматически приводится в действие, если водитель не реагирует на ситуацию, когда наезд на впереди идущий или стоящий автомобиль становится неизбежным.
Система предупреждения об опасности столкновения с функцией автоматического торможения — это более совершенная технология по сравнению с Системой предупреждения об опасности столкновения с функцией поддержки торможения, которая была впервые предложена в 2006.
Комплексное решение — радар и камера
Если предыдущая система, устанавливаемая на Volvo S80, включала только радар, то Система предупреждения об опасности столкновения с функцией автоматического торможения использует не только радар, но и камеру для определения положения впереди идущего автомобиля. Радар с радиусом действия до 150 метров работает с камерой, которая контролирует пространство впереди автомобиля на расстоянии до 55 метров.
Система использует технологию сравнения данных (Data Fusion), поступающих с радара и камеры, благодаря чему возросла эффективность системы.
«Система использует данные, поступающие с радара и с камеры, поэтому автоматическое торможение будет применено лишь в том случае, когда наезд становится неизбежным. Система запрограммирована таким образом, чтобы автономное торможение могло иметь место лишь тогда, когда данные радара и камеры показывают о неизбежности столкновения», — рассказывает Йонас Тизел (Jonas Tisell), менеджер технического проекта по созданию Системы предупреждения об опасности столкновения с функцией автоматического торможения Volvo Cars.
Одно из основных преимуществ камеры заключается в возможности опознавать стоящие автомобили и предупреждать водителя, при этом система характеризуется низким уровнем ложных аварийных сигналов.
«По статистике в 50 процентах случаев наезда столкновение происходит со стоящим впереди автомобилем. Поэтому Система предупреждения об опасности столкновения с функцией автоматического торможения вдвое более эффективна по сравнению с существующей ныне системой предупреждения об опасности столкновения с функцией поддержки торможения», — поясняет Йонас Тизел.
Система предлагает несколько уровней настройки чувствительности, что позволяет адаптировать ее для различных условий движения и стиля вождения. В меню автомобиля предоставлен выбор трех уровней чувствительности.
Первый этап — предупреждение и подготовка тормозов
Если автомобиль приближается к другому автомобилю сзади, и водитель никак не реагирует, система активирует предупредительный красный сигнал, который отражается на лобовом стекле. В это же время раздается звуковой сигнал. Это помогает водителю предпринять необходимые действия, и в большинстве случаев водителю удается избежать столкновения.
«Отражающийся сигнал очень эффективен. Красный свет возникает на лобовом стекле перед взором водителя — это подобно стоп сигналам впереди идущего автомобиля», — говорит Йонас Тизел.
Если, несмотря на предупреждение, риск столкновения лишь усиливается, активируется функция поддержки торможения. Для сокращения времени реакции тормозные колодки ближе прилегают к тормозным дискам. В гидравлической системе увеличивается давление для поддержания усилия торможения, поэтому даже если водитель приложит недостаточное усилие на педаль тормоза, автомобиль обеспечит эффективное торможение.
В гидравлической системе увеличивается давление для поддержания усилия торможения, поэтому даже если водитель приложит недостаточное усилие на педаль тормоза, автомобиль обеспечит эффективное торможение.
Автоматическое торможение снижает эффект скорости
Если водитель не тормозит, а система определяет, что столкновение неизбежно, активируется принудительное торможение.
Автоматическое торможение призвано снизить эффект скорости насколько это возможно и тем самым минимизировать риск получения травм людей, сидящих в обоих автомобилях.
«Снижение скорости при столкновении с 60 км/ч до 50 км/ч сокращает энергию удара примерно на 30 процентов. Это значит, что люди в автомобилях смогут получить не серьезные, а незначительные травмы. В зависимости от условий система автоматического торможения может вовсе предотвратить столкновение», — добавляет Йонас Тизел.
Адаптивный круиз контроль (ACC)
Чтобы сделать процесс управления автомобилем более удобным, в Volvo Cars был разработан Адаптивный круиз контроль (АСС). АСС помогает водителю поддерживать требуемую дистанцию до впереди идущего автомобиля. Такая система управления позволяет водителю снять напряжение за рулем, даже если приходится ехать в неровно двигающемся транспортном потоке.
АСС помогает водителю поддерживать требуемую дистанцию до впереди идущего автомобиля. Такая система управления позволяет водителю снять напряжение за рулем, даже если приходится ехать в неровно двигающемся транспортном потоке.
Адаптивный круиз контроль включает радар, который постоянно измеряет дистанцию до впереди идущих автомобилей. Система автоматически регулирует скорость, чтобы поддерживать заданную дистанцию.
Водитель включает круиз контроль, выставляет требуемую максимальную скорость в пределах от 30 до 200 км/ч и выбирает временной интервал до впереди идущего автомобиля. Предлагается выбор пяти временных интервалов от 1 до 2.6 секунды.
Если радар обнаруживает, что автомобиль впереди снижает скорость, АСС автоматически понижает скорость в соответствии со скоростью впереди идущего автомобиля.
«Адаптивный круиз контроль берет на себя часть управления автомобилем, благодаря чему водитель может сосредоточить внимание на дороге и продолжать движение в более безопасном режиме», — считает Йонас Тизел.
Система оповещения о сокращении дистанции (Distance Alert)
Система оповещения о сокращении дистанции — это еще одна технология, которая помогает водителю удерживать безопасную дистанцию до впереди идущего автомобиля, если водитель не включил Адаптивный круиз контроль.
Система оповещения о сокращении дистанции включается при помощи кнопки, расположенной на центральной консоли. Как в случае с АСС водителю предоставляется выбор пяти уровней настройки системы. Если временной интервал до впереди идущего автомобиля снижается и выходит за пределы заданных настроек, в нижней части лобового стекла отражается предупредительный сигнал.
Если при включенной Системе оповещения о сокращении дистанции включить Адаптивный круиз контроль, то Система оповещения о сокращении дистанции временно отключается.
Обе системы — Адаптивный круиз контроль и Система оповещения о сокращении дистанции — призваны помочь водителю и облегчить управление автомобилем в соответствии с национальными постановлениями, регламентирующими поддержание требуемой дистанции до впереди идущего автомобиля.
Ограничения системы
Возможности описанных систем зависят от количества и качества видимой дорожной разметки. Камера должна отчетливо различать разделительную линию между полосами движения. Слабое освещение, туман, снег или неблагоприятные погодные условия могут воспрепятствовать функционированию системы.
Опубликованная в данном пресс-релизе и на медиа сайте Volvo Cars информация может быть изменена в любое время без предварительного уведомления или обязательств. Пожалуйста, для получения наиболее свежей и достоверной для российского рынка информации обращайтесь в пресс-службу Volvo Cars в России.
Система предупреждения о столкновении* – обнаружение велосипедиста | Предупреждение об опасности столкновения | Поддержка водителя | V60 2015 Early
«Предупреждение о столкновении с автоторможением и обнаружением велосипедистов и пешеходов» обеспечивает помощь водителю, который рискует наехать на пешехода, столкнуться с велосипедистом или транспортным средством, неподвижным или движущимся в том же направлении.
Функция «узнает» велосипедистов только сзади и в том случае, когда они двигаются в одном направлении с автомобилем.
Наглядный пример, когда систем распознает велосипедиста – четкие контуры тела велосипедиста и велосипеда, которые располагаются точно перед автомобилем и совпадают со средней линией автомобиля.
Для оптимальной работы системы необходимо, чтобы функция, идентифицирующая велосипедиста, получала четкую информацию о контуре тела и велосипеда. Такая информация позволяет различать велосипед, а также голову, руки, плечи, ноги, верхнюю и нижнюю части тела человека и соотносить их с обычной схемой движения человека.
Система не может распознать велосипедиста, если большая часть его тела или велосипеда не видимы для камеры.
- Функция может распознавать только взрослых велосипедистов на взрослом велосипеде.
- Сзади на велосипеде на расстоянии не менее 70 см от поверхности дороги должен быть установлен четко видимый и разрешенный к применению отражатель красного цвета.
- Функция может распознавать велосипедистов, которые двигаются в одном направлении с автомобилем и находятся точно перед ним – ни под углом, и ни сбоку.
- Велосипедисты, которые двигаются вдоль левого или правого края воображаемой/продлеваемой боковой разметки полосы движения автомобиля, не распознаются или распознаются с запозданием.
- Точно так же, как и человеческого глаза, у этой функции ограничена способность «видеть» велосипедиста в сумерки и на рассвете.
- Функция не может обнаруживать велосипедистов при движении в темноте и туннелях – даже при наличии дорожного освещения.
- Для оптимального действия функции обнаружения велосипедистов необходимо активировать функцию City Safety™, см. City Safety™.
Предупреждение
Функция предупреждения о столкновении с автоматическим торможением и обнаружением велосипедистов является вспомогательным средством.
Функция не может обнаруживать:
- велосипедистов в любых ситуациях, например, велосипедистов, силуэт которых виден лишь частично.
- велосипедистов, одежда которых маскирует фигуру, или которые приближаются к автомобилю сбоку.
- велосипеды, у которых сзади отсутствуют красные светоотражатели.
- велосипеды, на которых установлен крупногабаритный груз.

Только водитель несет ответственность за соблюдение мер безопасности во время движения и соблюдение безопасного расстояния, выбранного с учетом скорости автомобиля.
Как работают системы предотвращения столкновений?
Кредит: CC BY 2.0 FRANK DERKS
Вождение автомобиля намного сложнее, чем мы обычно думаем, садясь за руль каждый день. Но есть вероятность, что у вас был момент — машина, которая внезапно тормозит перед вами, животное, выскакивающее на улицу, отвлекающее ваше внимание, — когда вы внезапно оказываетесь в опасности столкновения. Как вы отреагируете? Сможете ли вы ответить достаточно быстро? Неужели некоторые несчастные случаи просто неизбежны?
Наука снижения рисков
Несмотря на передовой опыт, правила дорожного движения и многочисленные кампании по безопасности, столкновения все же происходят каждый день. Поэтому неудивительно, что инженеры решили решить эту проблему автоматически. В 2016 году Национальное управление безопасности дорожного движения (NHTSA) и 20 крупных автопроизводителей договорились сделать автоматическое экстренное торможение стандартной функцией для всех новых автомобилей к 2022 году. Хотя эти системы не предотвращают все аварии, они, как было доказано, значительно смягчают их последствия. риски столкновения.
Поэтому неудивительно, что инженеры решили решить эту проблему автоматически. В 2016 году Национальное управление безопасности дорожного движения (NHTSA) и 20 крупных автопроизводителей договорились сделать автоматическое экстренное торможение стандартной функцией для всех новых автомобилей к 2022 году. Хотя эти системы не предотвращают все аварии, они, как было доказано, значительно смягчают их последствия. риски столкновения.
Благодаря соглашению с NHTSA, каждый крупный производитель автомобилей имеет сегодня на рынке какую-либо версию этой технологии.Но как эти системы работают, чтобы предотвратить столкновения? Это зависит от решения, но вот некоторые общие принципы, лежащие в основе технологии.
Старые технологии в новом трюке
С конца 1950-х годов инженеры искали способы предотвращения столкновений с помощью датчиков. Cadillac Cyclone, футуристический концептуальный автомобиль, разработанный Харли Эрлом, среди множества инновационных функций включал систему обнаружения радаров для предотвращения столкновений.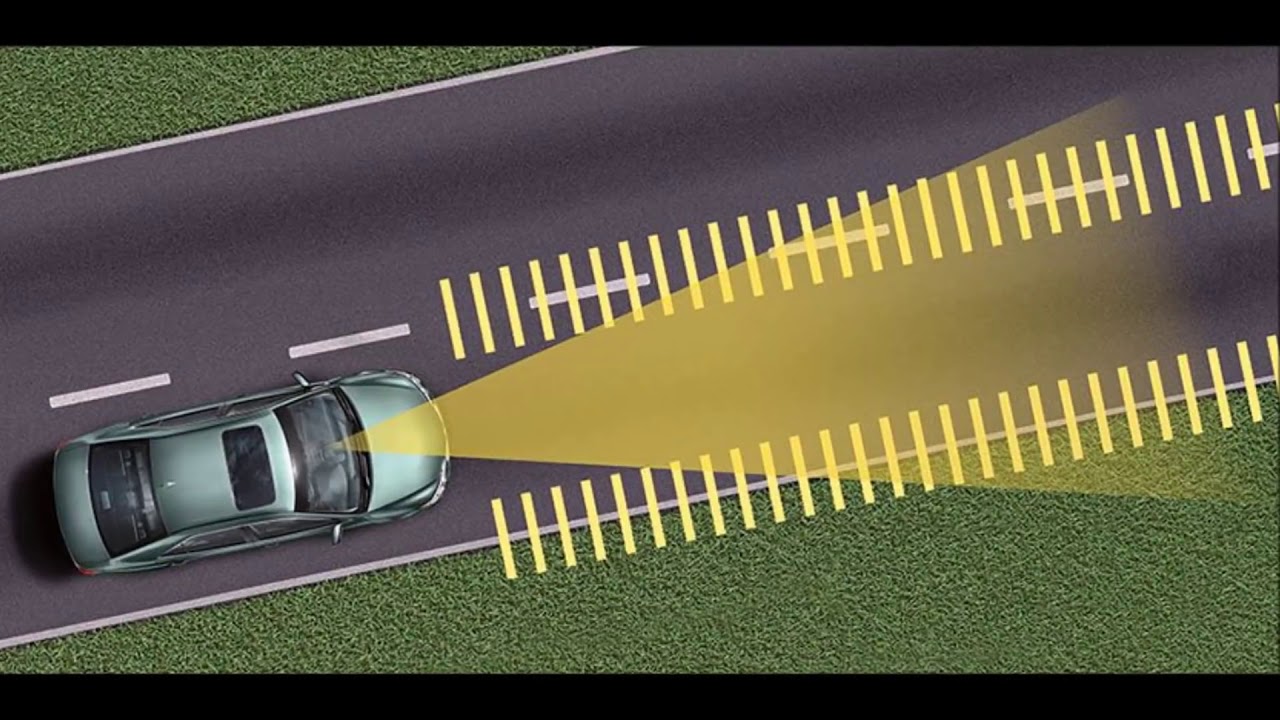 В то время считавшиеся слишком дорогими для массового производства, радарные системы по-прежнему будут играть важную роль в технологии предотвращения столкновений в будущем.
В то время считавшиеся слишком дорогими для массового производства, радарные системы по-прежнему будут играть важную роль в технологии предотвращения столкновений в будущем.
В 1995 году исследовательские лаборатории Hughes и Delco Electronics продемонстрировали основанную на радаре систему предотвращения прямых столкновений. Радиолокационные технологии прошли путь от носовых обтекателей Cyclone до небольших антенн, специально разработанных для транспортных средств. Радар прогрессировал и развивался, активно участвуя во многих автоматических системах предотвращения столкновений.
Дополнительная технология была внедрена в автомобильную конструкцию в 1997 году компанией Toyota, которая представила в Японии автомобиль с адаптивным круиз-контролем с использованием системы лазерного обнаружения.Эти лазеры также были спроектированы и усовершенствованы, чтобы стать более доступными для рынка по мере приближения крайнего срока NHSTA.
Как оповещать водителей и помогать им
Системы предотвращения столкновений реагируют на ситуации двумя разными способами. Первый — предупредить водителя о риске с помощью света, звука или и того, и другого. Автомобили с передней и задней камерами также обеспечивают визуальное предупреждение о препятствиях. Страховой институт дорожной безопасности (IIHS) активно изучает преимущества этих систем.
Первый — предупредить водителя о риске с помощью света, звука или и того, и другого. Автомобили с передней и задней камерами также обеспечивают визуальное предупреждение о препятствиях. Страховой институт дорожной безопасности (IIHS) активно изучает преимущества этих систем.
С использованием радара, лазеров и камер системы предупреждения о столкновении включают:
Предупреждение о лобовом столкновении (FCW): Визуальное и / или звуковое предупреждение для предупреждения водителя о риске столкновения. IIHS уже зафиксировал 27% -ное снижение количества столкновений спереди назад с помощью этой технологии.
Предупреждение о слепых зонах (BSW): Визуальное и / или звуковое уведомление о том, что транспортное средство находится в слепой зоне водителя на соседней полосе движения; может прозвучать дополнительное предупреждение, если включить указатель поворота, когда автомобиль находится в слепой зоне.
Исследования IIHS показали снижение количества ДТП при смене полосы движения на 14% и ДТП со сменой полосы движения с травмами в транспортных средствах с такой возможностью на 23%.Предупреждение о перекрестном движении: Визуальное, звуковое или тактильное предупреждение, если объект в настоящее время находится за пределами диапазона камеры, но кажется, что он движется в него. Исследования показывают снижение количества аварий при обратном движении на 22%.
Предупреждение о выезде с полосы движения (LDW) : визуальное, звуковое или тактильное оповещение о том, что водитель пересекает разметку полосы движения.Эта технология позволила на 11% снизить количество боковых и лобовых столкновений, а также на 21% снизить количество травм при таких авариях.
 Исследования IIHS показали снижение количества ДТП при смене полосы движения на 14% и ДТП со сменой полосы движения с травмами в транспортных средствах с такой возможностью на 23%.
Исследования IIHS показали снижение количества ДТП при смене полосы движения на 14% и ДТП со сменой полосы движения с травмами в транспортных средствах с такой возможностью на 23%. Помимо предупреждений и предупреждений, некоторые системы предотвращения столкновений помогают водителям снизить неизбежные риски. Эти системы будут игнорировать водителя, изменяя дроссельную заслонку транспортного средства или применяя тормоза. Инструменты для информирования этих систем аналогичны предупреждениям, включая радары, лазеры и камеры, однако реакция транспортного средства более активна.Функции предотвращения столкновений, которые активно помогают водителям, включают:
Эти системы будут игнорировать водителя, изменяя дроссельную заслонку транспортного средства или применяя тормоза. Инструменты для информирования этих систем аналогичны предупреждениям, включая радары, лазеры и камеры, однако реакция транспортного средства более активна.Функции предотвращения столкновений, которые активно помогают водителям, включают:
Адаптивный круиз-контроль: Более профилактические, чем реактивные, эти системы используют радар или лазеры для регулировки скорости круиз-контроля с помощью дроссельной заслонки, чтобы поддерживать необходимое расстояние до движущегося впереди автомобиля.
Автоматическое экстренное торможение (AEB): Тормоза включаются автоматически на основе обратной связи от датчиков, чтобы предотвратить столкновение или минимизировать скорость столкновения
Заднее автоматическое экстренное торможение: Тормоза включаются автоматически, чтобы предотвратить наезд автомобиля задним ходом с помощью системы контроля перекрестного движения или датчиков, таких как радар или лазеры.
Электронный контроль устойчивости (ESC): Расширение технологии антиблокировочной тормозной системы, ESC автоматически применяет тормоза, чтобы помочь управлять автомобилем надлежащим образом при потере сцепления с дорогой. Бортовой компьютер отслеживает различные датчики, чтобы определить, какие колеса тормозить, а какие ускорять.
Система помощи при парковке: Обратная связь от камер и датчиков объединяется, чтобы позволить транспортным средствам направиться на парковочное место, в то время как водитель контролирует скорость.

Комбинированная техника для безопасности
Самые сложные разработки в области предотвращения столкновений достигаются путем объединения информации от нескольких датчиков и систем. По мере того, как эти системы станут более совершенными и синергетическими, мы начнем реализовывать высокие цели, поставленные автопроизводителями в отношении повышения безопасности и, в конечном итоге, создания беспилотных транспортных средств.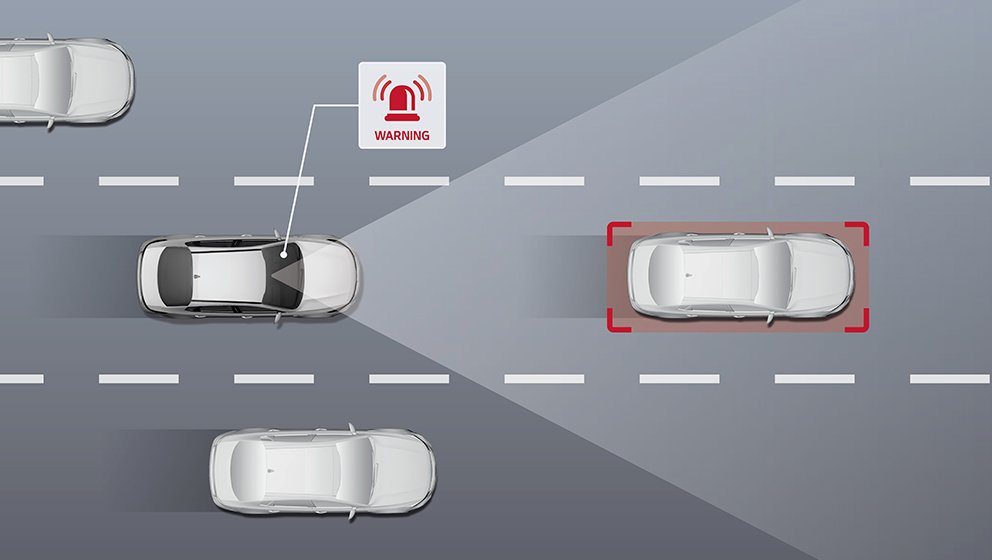
Понятно, что в ближайшем будущем все автомобили будут иметь некоторые варианты систем предотвращения столкновений.Тщательный выбор автомобиля и понимание возможностей каждой функции может помочь вам сделать лучший выбор для ваших нужд и познакомить вас с технологическими ограничениями — вы по-прежнему остаетесь за рулем. (По крайней мере, еще на несколько лет.)
Новая волна в технике безопасности: системы предотвращения столкновений
Ключевые выводы
Система предотвращения столкновения, также известная как система помощи водителю, представляет собой систему безопасности, предназначенную для предотвращения столкновения или уменьшения его серьезности за несколько секунд до его возникновения.В этой статье вы узнаете о различных типах систем предотвращения столкновений и о том, как они могут помочь вашему автопарку оставаться в безопасности.
По данным Национальной администрации безопасности дорожного движения (NHTSA), только в 2017 году в США произошло более двух миллионов дорожно-транспортных происшествий из-за наездов сзади. Хотя конкретные причины этих столкновений различаются, многие из них можно было бы обнаружить раньше — или даже избежать — с помощью системы предотвращения столкновений.Фактически, исследование, проведенное Страховым институтом безопасности дорожного движения (IIHS) в 2018 году, показало, что 62% водителей уделяли больше внимания дороге и чаще использовали указатели поворота, когда в их транспортном средстве была установлена система предотвращения столкновений.
Хотя конкретные причины этих столкновений различаются, многие из них можно было бы обнаружить раньше — или даже избежать — с помощью системы предотвращения столкновений.Фактически, исследование, проведенное Страховым институтом безопасности дорожного движения (IIHS) в 2018 году, показало, что 62% водителей уделяли больше внимания дороге и чаще использовали указатели поворота, когда в их транспортном средстве была установлена система предотвращения столкновений.
Если ваш автопарк стремится сократить количество инцидентов, связанных с безопасностью, принятие решения по предотвращению столкновений в кабине может стать отличным первым шагом. Читайте дальше, чтобы узнать больше об этой технологии и о том, как она может повысить безопасность вашего автопарка.
Что такое система предотвращения столкновений?
Система предотвращения столкновения, также известная как система помощи водителю, представляет собой систему безопасности, предназначенную для предотвращения столкновения или уменьшения его серьезности за несколько секунд до его возникновения. Некоторые системы используют технологию машинного зрения искусственного интеллекта, в то время как другие также используют видеорегистраторы для изображений и GPS для получения информации о местоположении, чтобы обнаруживать неизбежное столкновение. При обнаружении столкновения эти системы могут предупредить водителя звуком или светом, чтобы предотвратить столкновение.
Некоторые системы используют технологию машинного зрения искусственного интеллекта, в то время как другие также используют видеорегистраторы для изображений и GPS для получения информации о местоположении, чтобы обнаруживать неизбежное столкновение. При обнаружении столкновения эти системы могут предупредить водителя звуком или светом, чтобы предотвратить столкновение.
Различные типы систем предотвращения столкновений
Существует множество различных систем предотвращения столкновений, которые могут использоваться флотом для повышения безопасности. Популярные системы включают:
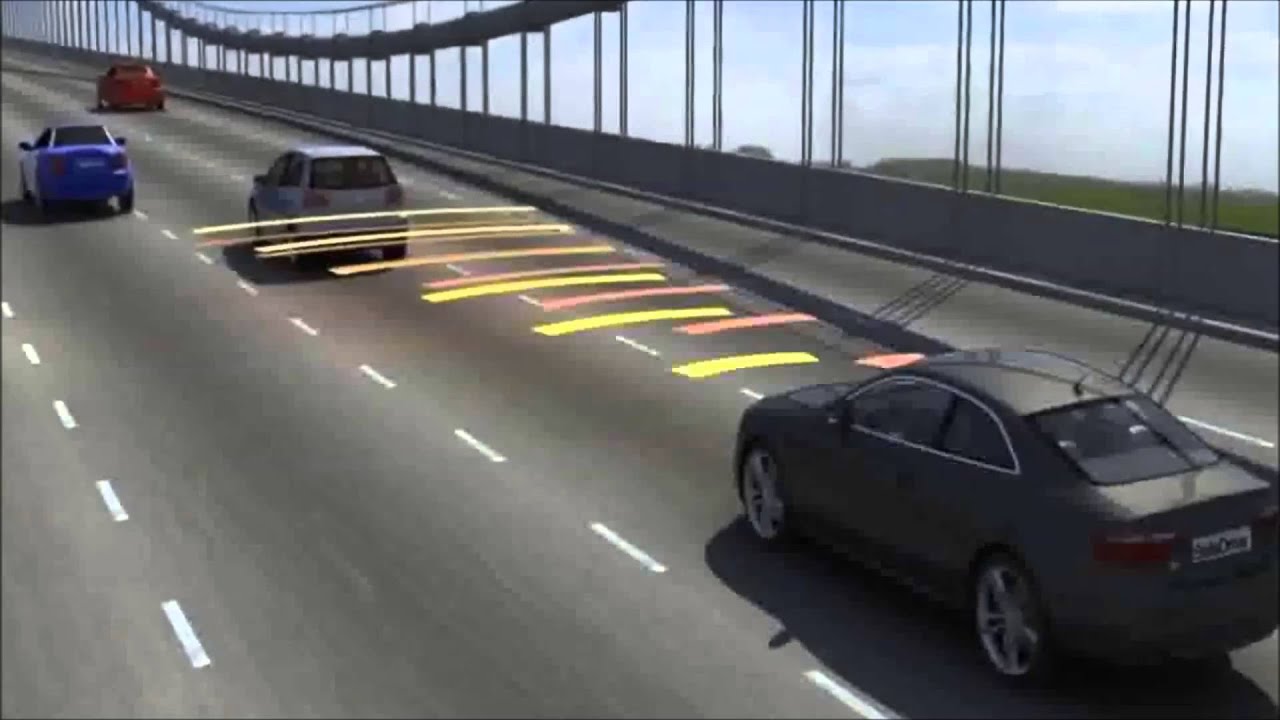
Система предупреждения о лобовом столкновении (FCW): Система FCW — это передовая технология безопасности, которая отслеживает скорость транспортного средства, скорость транспортного средства впереди него и расстояние между транспортными средствами. Если транспортные средства подойдут слишком близко из-за скорости заднего транспортного средства, система FCW предупредит этого водителя о надвигающейся аварии.
Система предупреждения о выезде с полосы движения: этот тип системы предотвращения столкновений предназначен для предупреждения водителей, если их автомобиль начинает уходить с полосы движения, и может быть особенно полезен для помощи в обнаружении слепых зон в режиме реального времени.
Система обнаружения пешеходов: пешеходы и велосипедисты могут быть одними из наиболее уязвимых целей для транспортных средств, при этом пешеходы составляют почти четверть всех смертельных случаев на дорогах. Система обнаружения пешеходов использует датчики для определения движения людей на дороге — например, велосипедистов или пешеходов — в попытке помочь водителям увидеть движущийся объект, пока не стало слишком поздно.
Автоматическая тормозная система: AEB — это технология, которая автоматически активирует тормозную систему автомобиля при обнаружении встречного объекта. Некоторые системы автоматического экстренного торможения (AEB) применяют только часть тормозной мощности, чтобы дать водителю больше времени, чтобы вмешаться, в то время как другие системы будут качать тормоза до полной остановки автомобиля.


Сделайте безопасность конкурентным преимуществом для вашего бизнеса
90% клиентов говорят, что Samsara помогла повысить безопасность их автопарка.
Как система предотвращения столкновений может обеспечить безопасность вашего автопарка
Системы предотвращения столкновениймогут быть отличным способом помочь вашим транспортным средствам избежать происшествий, связанных с безопасностью, а также служить ценным инструментом для обучения водителей передовым методам безопасности. Поскольку эти системы мониторинга используют сенсорную технологию для обнаружения надвигающихся столкновений, они могут предупреждать водителей о проблеме, пока не стало слишком поздно. Кроме того, они могут существенно повлиять на вашу прибыль: системы предотвращения столкновений могут помочь снизить количество дорогостоящих инцидентов, связанных с безопасностью, которые происходят в вашем парке.
Чтобы узнать больше о том, как Samsara может помочь вашему автопарку оставаться в безопасности, прочитайте больше о нашей технологии видеорегистратора AI или обратитесь за бесплатной пробной версией сегодня.
Как работает система предотвращения столкновений?
20 июня 2020 г., Fix Auto USA
Система предотвращения столкновений (CAS), иногда называемая системой предотвращения столкновений, может помочь вам предотвратить или уменьшить серьезность столкновения автомобиля.Система может использовать искусственный интеллект (AI), видеорегистратор и технологии GPS, чтобы помочь вам определить неизбежное столкновение. Если столкновение вот-вот произойдет, CAS уведомит вас звуком, светом или обоими способами, чтобы вы могли действовать быстро и предотвратить аварию.
Какие типы систем предотвращения столкновений доступны?Общие варианты CAS включают:
1. Система предотвращения лобового столкновения Система предотвращения лобовых столкновений отслеживает три вещи: скорость вашего автомобиля, скорость движущегося впереди автомобиля и расстояние между двумя автомобилями.Если ваш автомобиль приближается к идущему впереди автомобилю, система предотвращения лобового столкновения предупреждает вас о надвигающейся аварии.
Система предупреждения о выезде с полосы движения уведомляет вас, если ваш автомобиль начинает съезжать с полосы движения. Кроме того, система предупреждения о выезде с полосы движения может обеспечить обнаружение слепых зон в реальном времени, чтобы снизить риск столкновения с ними.
3. Автоматическая тормозная системаАвтоматическая тормозная система автоматически активирует тормоза вашего автомобиля, если она обнаруживает объект рядом с вашим автомобилем.Система применяет небольшое тормозное усилие, и вы можете применять дополнительное тормозное усилие по мере необходимости, чтобы замедлить или остановить свой автомобиль.
Характеристики системы предотвращения столкновенийОбщие функции CAS включают:
1. Адаптивный круиз-контроль Адаптивный круиз-контроль использует радар или лазеры для управления скоростью круиз-контроля вашего автомобиля. При этом адаптивный круиз-контроль помогает вам сохранять безопасное расстояние до идущего впереди автомобиля.
При этом адаптивный круиз-контроль помогает вам сохранять безопасное расстояние до идущего впереди автомобиля.
Заднее автоматическое экстренное торможение использует систему наблюдения за перекрестком, радар или лазеры для обнаружения объектов позади вашего автомобиля. Он автоматически включает тормоза вашего автомобиля каждый раз, когда вы двигаетесь задним ходом и приближаетесь к объекту позади вашего автомобиля.
3. Электронная система контроля устойчивостиЭлектронный контроль устойчивости (ESC) служит продолжением антиблокировочной тормозной системы (ABS) вашего автомобиля.ESC использует бортовой компьютер, который контролирует датчики вашего автомобиля, которые помогают управлять торможением и ускорением колес. Он также автоматически включает тормоза и помогает управлять автомобилем, если он теряет сцепление с дорогой.
4. Система помощи при парковке Ассистент парковки собирает обратную связь от камер и датчиков вокруг вашего автомобиля. Затем он использует эту информацию, чтобы помочь безопасно направить ваш автомобиль на парковочное место, пока вы контролируете его скорость.
Затем он использует эту информацию, чтобы помочь безопасно направить ваш автомобиль на парковочное место, пока вы контролируете его скорость.
Адаптивное освещение поворотов освещает дорогу при повороте рулевого колеса автомобиля. Они помогают улучшить видимость при движении в условиях низкой освещенности или ночью, особенно на холмах и поворотах.
6. Обнаружение сонливостиCAS может использовать данные о вашем поведении рулевого управления, собранные с течением времени, для выявления любых несоответствий, указывающих на то, что вы можете дремать за рулем. Или система может отслеживать движение ваших глаз или положение автомобиля в полосе движения, чтобы обнаруживать предупреждающие знаки о сонном вождении.
Каковы преимущества вождения автомобилей с системой предотвращения столкновений? CAS использует сочетание самых современных технологий для повышения безопасности водителя, а также для повышения безопасности велосипедистов и пешеходов. Это также снижает риск столкновений, что помогает избежать повреждений автомобиля и затрат на страхование, связанных с этими происшествиями.
Это также снижает риск столкновений, что помогает избежать повреждений автомобиля и затрат на страхование, связанных с этими происшествиями.
CAS не останавливает столкновения, но помогает снизить риск столкновения.К счастью, есть много вещей, которые вы можете сделать, чтобы избежать столкновений, например:
1. Избавьтесь от отвлекающих факторов в автомобилеВыключите мобильный телефон, не ешьте и не отвлекайтесь от всего остального в машине. Сосредоточьтесь на поставленной задаче — ведите машину и безопасно доберитесь до конечного пункта назначения.
2. Используйте свои боковые и задние зеркала Регулярно смотрите в боковое и заднее зеркало, чтобы отслеживать других водителей на дороге. Эти зеркала также полезны, когда вы возвращаетесь на место парковки, поскольку они позволяют вам видеть любой встречный транспорт и то, насколько близко вы находитесь к автомобилям впереди и позади места.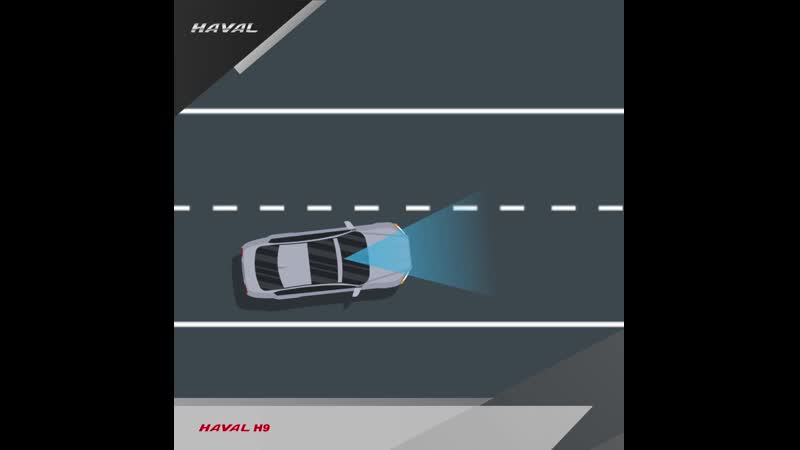
Снег, мокрый снег, дождь и другие неблагоприятные погодные условия создают скользкую дорогу, повышающую риск столкновения. По возможности избегайте вождения в суровых погодных условиях. Если вам нужно путешествовать в суровых погодных условиях, двигайтесь медленно и оставляйте достаточно места между автомобилем и транспортным средством впереди вас.
4. Соблюдайте правила дорожного движенияОбращайте внимание на знаки «Стоп» — помните, если вы проедете через знак «Стоп», вы рискуете столкнуться с боком.Вы также должны сопротивляться искушению проехать через желтый свет и подождать секунду, прежде чем нажать на акселератор автомобиля после того, как красный свет станет зеленым.
5. Регулярное обслуживание и ремонт автомобилей Своевременно обновляйте тормоза и другие системы автомобиля. Посещая авторемонтную мастерскую через регулярные промежутки времени, вы можете осмотреть свой автомобиль и получать периодическое обслуживание и ремонт. В результате вы можете поддерживать свой автомобиль в рабочем состоянии на высшем уровне.
В результате вы можете поддерживать свой автомобиль в рабочем состоянии на высшем уровне.
Вышеупомянутые советы полезны для всех водителей, независимо от того, оснащены ли их автомобили системой CAS. Воспользуйтесь этими советами, и вы снизите риск столкновения.
Это сообщение в блоге предоставлено Fix Auto San Francisco — South of Market , ведущим отраслевым экспертом и мастерской по ремонту столкновений, обслуживающей область Сан-Франциско SOMA, включая Mission Bay, Rincon Hill, South Beach и др. модные направления
Система предотвращения столкновений — обзор
1.1 Историческая справка
За свою более чем столетнюю историю радар сыграл фундаментальную и выдающуюся роль в широком спектре гражданских и военных приложений благодаря своей способности работать в любую погоду, днем и ночью, а также обнаруживать и отслеживать , а также изображения целей с высокой точностью на больших дистанциях.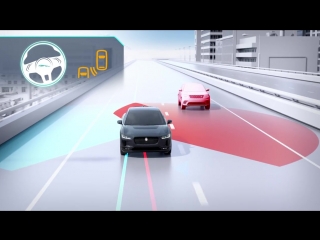 В настоящее время радары используются в прогнозировании погоды, дистанционном зондировании и картировании, астрономии, управлении воздушным и наземным движением, противовоздушной обороне и управлении вооружением, автомобильных сенсорных системах, визуализации и распознавании целей с высоким разрешением, бортовых системах предотвращения столкновений и уход за престарелыми и уход за престарелыми, и это лишь некоторые из них [1–12].
В настоящее время радары используются в прогнозировании погоды, дистанционном зондировании и картировании, астрономии, управлении воздушным и наземным движением, противовоздушной обороне и управлении вооружением, автомобильных сенсорных системах, визуализации и распознавании целей с высоким разрешением, бортовых системах предотвращения столкновений и уход за престарелыми и уход за престарелыми, и это лишь некоторые из них [1–12].
Радар — это, по сути, электромагнитный датчик для обнаружения и определения расстояния до объектов путем излучения электромагнитных волн для освещения интересующей сцены и приема отраженных эхосигналов от объектов. Обрабатывая принятый сигнал, радар может принять решение о том, присутствуют ли одна или несколько целей в интересующей вас сцене, и определить положение и скорость и, возможно, размер, форму и характеристики обнаруженных целей. С точки зрения геометрии системы, радар можно разделить на три различных типа: моностатический радар, бистатический радар и мультистатический радар. Моностатический радар имеет передатчик и приемник, которые расположены в одном месте. Напротив, бистатический радар — это радар, который работает с передатчиком и приемником, расположенными отдельно в разных местах. Мультистатический радар — это обобщение бистатического радара за счет включения нескольких передатчиков и приемников в разных местах с перекрывающимся пространственным охватом, как показано на рис. 1.1.
Моностатический радар имеет передатчик и приемник, которые расположены в одном месте. Напротив, бистатический радар — это радар, который работает с передатчиком и приемником, расположенными отдельно в разных местах. Мультистатический радар — это обобщение бистатического радара за счет включения нескольких передатчиков и приемников в разных местах с перекрывающимся пространственным охватом, как показано на рис. 1.1.
Рисунок 1.1. Иллюстрация мультистатической радиолокационной системы.
Согласно общепринятому определению, мультистатический радар можно рассматривать как систему из нескольких отдельных пар передатчик-приемник, которые работают независимо [13,14].Информация об обнаружении, оценка цели и другая высокоуровневая информация о цели от этих пар передатчик-приемник передается в центральный процессор, где они объединяются для повышения эффективности обнаружения и оценки. Этот тип объединения данных часто рассматривается как некогерентная обработка. Например, мультистатический радар может использовать мультилатерацию для оценки кинематического состояния цели (т. Е. Положения и скорости) на основе измерений дальности, доплеровского сдвига и / или угла, полученных независимо на разных парах передатчик-приемник в системе.Радар MIMO (несколько входов и выходов) с широко разнесенными антеннами — это еще один тип мультистатического радара с другой конструкцией, которая отличает его от мультистатического радара совместной обработкой на уровне сигнала как для передачи, так и для приема, а также его тесным подключением к MIMO-коммуникации [15,16]. Однако этот тип мультистатического радара в этой книге не рассматривается.
Пространственное разнесение, обеспечиваемое разделением передатчиков и приемников, не только дает ряд преимуществ бистатическим и мультистатическим радарам по сравнению с моностатическими радарами, но также дает разработчикам систем дополнительные степени свободы для оптимизации конструкции радиолокационной системы для конкретных приложений [13, 14].Поскольку приемники не совмещены с передатчиками, бистатические и мультистатические радары способны противодействовать ретродиректорам, которые воспринимают радиолокационные сигналы от передатчиков и направляют сигналы глушения обратно к передатчикам. Бистатическая / мультистатическая геометрия также увеличивает поперечное сечение радара для скрытых целей, тем самым улучшая характеристики обнаружения. Более того, кинематическое состояние цели может быть оценено с высокой точностью с помощью мультистатического радара благодаря использованию мультилатерации из измерений, собранных несколькими парами передатчик-приемник, каждая из которых имеет разную бистатическую геометрию по отношению к цели.Кроме того, мультистатический радар может избежать неблагоприятной геометрии бистатического радара, в котором цель находится вблизи прямой видимости между передатчиком и приемником.
Бистатические и мультистатические радары могут включать свои собственные специализированные передатчики или использовать возможности освещения от других источников передачи [13,14,17]. Источники возможностей могут исходить от существующих радиолокационных систем (кооперативных или некооперативных) или от коммерческих некооперативных сигналов радиовещания и связи.Радарные системы, использующие источники света возможностей, обычно называют пассивными. В пассивной конфигурации бистатический и мультистатический радар могут работать в гражданских районах, особенно в крупных городах с несколькими аэропортами, где передача с помощью радара может быть запрещена. Кроме того, использование возможностей освещения от других существующих источников передачи исключает затраты на строительство и эксплуатацию передатчиков и связанного с ними оборудования.
Эти преимущества бистатического и мультистатического радара достигаются за счет повышенной сложности аппаратного обеспечения системы и обработки сигналов, особенно с точки зрения подавления сигнала прямого тракта и синхронизации передатчика-приемника.Тем не менее, большой прогресс был достигнут в решении этих сложных проблем благодаря огромному количеству исследований, посвященных темам формирования луча, проектирования интегральных схем и глобальной системы позиционирования, что делает бистатические и мультистатические радиолокационные системы совершенно применимыми в реальных ситуациях. [13].
Бистатические и мультистатические радары переживали периодические возрождения на протяжении всей истории развития радаров. Самые первые радары были двухстороннего типа. До и во время Второй мировой войны несколько бистатических радаров непрерывного действия были разработаны и развернуты во многих странах, включая США, Великобританию, Советский Союз, Францию, Германию, Японию и Италию.С момента изобретения дуплексера радара, который позволяет использовать импульсные сигналы с одной общей антенной как для передачи, так и для приема, моностатический радар доминировал в области радиолокационных исследований в основном из-за преимуществ работы на одном месте. Следовательно, все работы с бистатическими радарами были прекращены к концу Второй мировой войны. Первое возрождение бистатических и мультистатических радаров началось в 1950-х годах с их применений в противовоздушной обороне и предупреждении о пуске баллистических ракет, в тактических полуактивных самонаводящихся ракетах, а также в контрольно-измерительной аппаратуре и спутниковом слежении.Второе возрождение произошло в 1970-х и 1980-х годах. Ряд экспериментальных бистатических радиолокационных систем были испытаны (но не развернуты) в ответ на угрозы ретроспективных помех и противорадиационные ракетные угрозы. Мультистатическая измерительная система для отслеживания баллистических ракет, представляющая собой мультистатический радарный автостопщик, была развернута в 1980-х годах. Первый эксперимент использования радиопередатчиков в качестве источников света возможностей был проведен во время этого периода возрождения. С начала третьего возрождения в середине 1990-х, обширные исследования были посвящены бистатическим и мультистатическим радарам, включая методы фокусировки изображения и компенсации движения для бистатического радара с синтезированной апертурой, методы адаптивного подавления помех для бистатической индикации движущихся целей и использование передатчики коммерческого вещания для пассивных радаров.Подробный обзор истории радаров, включая бистатические и мультистатические радары, доступен в [13,14,17].
Системы предотвращения столкновений | Мобильность и транспорт
Системы предотвращения столкновений
Значительное количество исследований посвящено системам eSafety будущего. В настоящее время ведется большая работа по таким технологиям, как системы предотвращения столкновений, но их полезность для решения сценариев аварий с высоким риском, типичных для большинства европейских дорог, а также их осуществимость еще предстоит определить.
Исследования систем предупреждения и предотвращения столкновений проводятся в Японии, США и Европейском союзе в рамках программы Европейской комиссии eSafety . После лабораторных исследований были сделаны очень большие оценки потенциала безопасности таких систем, но ряд технических и поведенческих проблем, связанных со многими концепциями, требует полной оценки на дороге. Чтобы быть практичным, большинство предлагаемых систем требует хорошо контролируемой дорожной ситуации, такой как на автомагистралях, но где потенциал снижения количества несчастных случаев относительно низок.Для обзора ключевых вопросов [41] ОЭСР, 2003 г. Безопасность дорожного движения: влияние новых технологий.
Разрабатываются различные системы:
Предупреждение о прямом столкновении
— это система, которая включает визуальное и звуковое предупреждение о том, что водитель находится слишком близко к идущему впереди транспортному средству. Предупреждение зависит от того, какое расстояние между транспортным средством и транспортным средством впереди. Уровень предупреждения меняется с «безопасного» на «критический» по мере уменьшения следующего расстояния.
Система предупреждения о обратном столкновении
— это визуальная и звуковая система, предупреждающая водителей о вероятности столкновения с объектом позади транспортного средства с помощью датчиков в заднем бампере.Предупреждение усиливается, когда расстояние между задней частью автомобиля и объектом уменьшается.
Адаптивный круиз-контроль (ACC)
Улучшает автоматический круиз-контроль, используемый во многих новых автомобилях, за счет автоматического поддержания заданного расстояния до идущего впереди автомобиля. Расстояние до идущего впереди автомобиля измеряется радаром, лазерными системами или обоими. Когда скорость идущего впереди транспортного средства ниже установленной скорости, система ACC регулирует скорость транспортного средства, чтобы обеспечить безопасное расстояние до ведущего транспортного средства.
Предотвращение столкновений путем торможения
— это эволюция ACC с добавлением тормозной системы, увеличивающей скорость движения за счет торможения; эти системы могут также обнаруживать препятствия на дороге и соответственно тормозить. Скорость и расстояние, на котором работают системы, определяются расположением и типом датчиков, а также способностью распознавания систем.
Устройства для удержания полосы движения
Это электронные системы предупреждения, которые активируются, если автомобиль собирается съехать с полосы движения или с дороги.Время до столкновения при смене полосы движения, критически важной для безопасности, обычно намного меньше одной секунды. Поскольку среднее время реакции водителя составляет около одной секунды, у водителя недостаточно времени, чтобы отреагировать на предупреждение до сбоя. Поскольку времени для реакции на предупреждение недостаточно, смену полосы движения и объединение аварий, вероятно, можно избежать только с помощью систем вмешательства. Но у них есть свои проблемы: как определить намерения водителя и как вмешаться. Это может происходить путем принятия на себя рулевого управления от водителя или обеспечения обратной связи через рулевое колесо.Техническая и эксплуатационная осуществимость таких систем еще предстоит продемонстрировать. Большинство существующих систем являются системами только для предупреждений.
Что такое система предотвращения столкновений? — Определение
Система предотвращения столкновений — это система безопасности, предназначенная для предупреждения, предупреждения или помощи водителям, чтобы избежать неизбежных столкновений и снизить риск происшествий. В системах предотвращения столкновений используются различные технологии и датчики, такие как радары, лазеры, камеры, GPS и искусственный интеллект.Не все системы предотвращения столкновений созданы одинаково — некоторые предупреждают или предупреждают, в то время как другие игнорируют водителя, чтобы помочь им избежать столкновений и снизить риск.
Типы систем предупреждения о столкновении:
- Предупреждение о прямом столкновении (FCW)
- Предупреждение о слепых зонах (BSW)
- Предупреждение о выезде с полосы движения (LDW)
- Предупреждение о перекрестном движении
- Система обнаружения пешеходов
Типы Системы предотвращения столкновений:
- Автоматическое экстренное торможение (AEB)
- Адаптивный круиз-контроль
- Электронная система контроля устойчивости (ESC)
- Система помощи при парковке
Зачем коммерческим автопаркам системы предотвращения столкновений?
Руководители автопарков и руководители служб безопасности знают, что их главный ресурс — это водители. Их конечная цель — обеспечить безопасность, успех и чувство ценности водителя.Однако они также понимают, насколько важно поддерживать продуктивность транспортных средств и водителей на дороге, сокращать количество столкновений и снижать ответственность и затраты на техническое обслуживание. Пытаясь уравновесить это, многие обращаются к системам предотвращения столкновений в транспортных средствах, чтобы уменьшить столкновения и расходы, а также обеспечить безопасность водителя.
Как ИИ развивает системы предотвращения столкновений?
Использование датчиков искусственного интеллекта в транспортном средстве для обнаружения движения водителя, направления взгляда / внимания, активности транспортного средства, условий дорожного движения и других контекстных данных для принятия решений о неизбежных рисках в реальном времени может обеспечить в среднем 40-60% снижение в частоте столкновений и затратах, связанных с столкновениями.Датчики искусственного интеллекта и вмешательство искусственного интеллекта в транспортном средстве в режиме реального времени с 4 из 5 водителей сокращают отвлекаемое вождение БЕЗ участия менеджера. Системы безопасности AI вообще не требуют просмотра со стороны человека или доступа к видео и полностью совместимы с обеспечением конфиденциальности водителя.
Как работают предупреждения о столкновениях с прогнозированием Nauto
Для уменьшения количества столкновений требуется нечто большее, чем просто политика безопасности, традиционное обучение водителей и системы ADAS, основанные на физических принципах. Предупреждения Nauto Predictive Collision Alerts — первые в отрасли, которые одновременно объединяют важные входные данные, включая поведение водителя, чтобы предоставить водителям достаточно времени для реагирования и предотвращения неизбежных столкновений в режиме реального времени, прежде чем они произойдут, а не после.
Система предотвращения столкновений Nauto Двойные камеры, установленные в кабине транспортного средства, используют компьютерное зрение (разновидность ИИ) и запатентованные алгоритмы для оценки ситуационного риска и определения степени отвлечения внимания, а также для понимания потенциальных рисков на дороге. дорога впереди, например, выезжающий или почти работающий светофор и знаки остановки. Камера Nauto непрерывно синтезирует входные данные внутри и вокруг транспортного средства, включая поведение водителя, движение транспортного средства, элементы трафика и контекстные данные, в своей многозадачной модели сверточной нейронной сети (CNN) для определения уровней риска столкновения.По мере того как обнаруженный риск усиливается, предупреждающие предупреждения о столкновениях сигнализируют водителю о необходимости принять меры с увеличением уровня срочных предупреждений. Предупреждающие предупреждения о столкновении могут дать водителям на целых 100 дополнительных футов для реакции на потенциальное столкновение при движении со скоростью 60 миль в час.
Передовые технологии | NHTSA
NHTSA продолжает работу над системами предупреждения о ДТП, и недавно агентство начало крупное полевое исследование с участием 2800 автомобилей, в котором участвовали серийные системы предупреждения о ДТП ведущих производителей автомобилей.Эти автомобили оснащены системами FCW и LDW, а также различными методами (или модальностями) предупреждения водителя. НАБДД будет отслеживать работу и использование этих систем водителями в течение 1 года, чтобы помочь лучше понять потенциал безопасности, приемлемость водителей, возможные варианты адаптации и надежности, а также общие проблемы надежности технологий. NHTSA также недавно запустило небольшое сопутствующее полевое исследование систем предупреждения о столкновениях на уровне производства с использованием транспортных средств с очень высоким уровнем оснащения (включая видеозапись водителя и его окружения), чтобы дополнить более крупное полевое исследование.
NHTSA также оценивает системы мониторинга слепых зон (BSM), внедряемые в некоторые серийные автомобили. Мы тестируем такие системы в контролируемых условиях испытательного трека, чтобы определить производительность в различных кинематических условиях.
НАБДД признает, что преимущества таких систем предупреждения с точки зрения безопасности напрямую связаны с эффективностью интерфейса предупреждения о столкновении, позволяющего привлечь внимание водителя к ситуации неминуемой аварии и принять соответствующие ответные меры.Поэтому НАБДД занимается значительными исследованиями, связанными с оценкой эффективности проектов и реализаций альтернативных интерфейсов предупреждения о столкновениях, а также процедур измерения такой эффективности. Эта работа в совокупности называется программой «Метрики интерфейса предупреждения о столкновениях» (CWIM) и более подробно обсуждается в разделе «Исследование человеческого фактора».
DOT HS 812 247 Крупномасштабные полевые испытания систем предупреждения о лобовом столкновении и выезде с полосы движения Февраль 2016 г.
В этом отчете рассматривается полевое исследование технологий предупреждения о дорожно-транспортных происшествиях с использованием инновационной крупномасштабной техники сбора данных для сбора информации о системах предотвращения столкновений и о том, как водители реагируют на них.Хотя конкретная изучаемая система представляла собой систему предупреждения о лобовом столкновении на основе камеры General Motors и систему предупреждения о выезде с полосы движения, этот метод можно было применить к другим появляющимся системам активного предотвращения столкновений.
Исследовательская группа обнаружила, что этот метод сбора данных имеет несколько сильных сторон, включая стоимость, размер выборки и естественное тестирование, когда водители используют свои собственные транспортные средства, где они могут регулировать настройки системы или даже выключать системы. Этот метод позволил исследователям изучить возможные долгосрочные изменения в том, как драйверы адаптируются к таким системам, и эффективно получить «быстрые» крупномасштабные результаты.
Технология предотвращения столкновенийпродолжает развиваться, и НАБДД активно проводит исследования, связанные с технологиями, которые, помимо предупреждения водителей об угрозе столкновения, могут принимать активный контроль над транспортным средством, чтобы помочь смягчить или избежать аварии (если предупреждения не принимаются во внимание. со стороны водителя, либо его реакция недостаточна, чтобы избежать аварии). В частности, NHTSA концентрирует свои усилия на технологиях динамической тормозной системы (DBS) и торможения при неизбежном столкновении (CIB), предлагаемых производителями легковых автомобилей.В таких системах используются радары, камеры, лидары и другие сенсорные технологии для обнаружения и отслеживания транспортных средств, пешеходов или объектов на пути вперед.
ТехнологияDBS служит для увеличения тормозного усилия, инициируемого водителем во время неизбежных столкновений, если реакция водителя определяется (системой) как недостаточная для предотвращения столкновения. Системы CIB будут работать для автоматического включения тормозов в ситуации неизбежной аварии, если водитель вообще не реагирует на предупреждения.НАБДД в настоящее время оценивает эффективность таких систем в различных сценариях аварий и в контролируемых условиях испытаний. Мы также разрабатываем процедуры объективных испытаний и соответствующее испытательное оборудование, в том числе поражаемую «суррогатную» целевую машину для имитации реальной ведущей машины на пути следования.
В июле 2012 года агентство опубликовало запрос на комментарии, в котором запрашиваются отзывы о наших наблюдениях за технологиями DBS и CIB, а также рассматриваются протоколы тестирования, которые можно использовать для проверки их эффективности.NHTSA находится в процессе оценки отзывов отрасли и общественности, продвигая наши исследования, связанные с анализом преимуществ для безопасности, процедурами испытаний, а также общей надежностью и работой автоматических тормозных систем.
Объективные тесты для перспективных систем предотвращения столкновений с пешеходами, DOT HS 812 040, июнь 2014 г.
Объективные тесты для систем автоматического торможения при неизбежном столкновении (CIB) — окончательный отчет, DOT HS 811 521, сентябрь 2011 г. Тормозные системы (CIB) — Приложение, DOT HS 811 521A, сентябрь 2011 г.
Протокол тестового трека для оценки эффективности взаимодействия водителя и транспортного средства с предупреждением о лобовом столкновении, DOT HS 811 501, июль 2011 г.
Второй годовой отчет о неизбежном столкновении (CIB), спонсируемый Национальная администрация безопасности дорожного движения, июнь 2010 г., DOT HS 811 341
Первый годовой отчет о неизбежном торможении при столкновении (CIB), DOT HS 811 340, июнь 2010 г. , Апрель 2010 г.
В то время как большая часть наших исследований на сегодняшний день была сосредоточена на системах DBS и CIB, которые обнаруживают и реагируют на другие транспортные средства и объекты, NHTSA также проводит исследования, связанные с передовыми системами, которые также способны обнаруживать пешеходов, предупреждать и автоматически экстренно тормозить. .В настоящее время мы работаем с несколькими отраслевыми партнерами (в основном через Партнерство по предотвращению столкновений, CAMP), чтобы оценить ряд передовых технологий обнаружения пешеходов, которые могут как предупреждать, так и автоматически применять тормоза, если система обнаруживает неизбежное столкновение с пешеходом. Наша работа сначала была сосредоточена на подробном анализе и профиле сценариев дорожно-транспортных происшествий с участием пешеходов с использованием как существующих баз данных о дорожно-транспортных происшествиях, так и информации, собранной в ходе реальных полевых исследований, координируемых CAMP.Затем мы разработали различные процедуры тестирования для параллельного (или представления) сценариев высокочастотных аварий, наблюдаемых в предыдущем исследовании. Мы также работаем с отраслевыми партнерами над разработкой стандартизированных манекенов для пешеходов и устройств передвижения, чтобы повысить точность и повторяемость наших испытаний. Следующие шаги будут включать разработку процедур объективных испытаний для систем обнаружения пешеходов.
Изображение: Dynamic Research, Inc. — Honda R&D Co., Ltd. (DRI-Honda) Усовершенствованная тормозная система для предотвращения столкновений — Проект передовых технологий предотвращения столкновений
Потребности в предотвращении столкновений и профили мер противодействия для приложений безопасности на основе связи легковых автомобилей с пешеходами (DOT HS 812 312)
Это исследование поможет поддержать разработку технологий предотвращения столкновений на основе V2P и изучит базы данных аварий GES и FARS по порядку классифицировать 21 сценарий предаварийного движения пешеходов на основе различных маневров транспортных средств и пешеходов.Эти сценарии были ранжированы на основе сопутствующих затрат, и было выбрано пять приоритетных сценариев, которые представляют 88% затрат на ДТП с пешеходами. Для приоритетных сценариев были изучены и количественно оценены факторы, способствующие ДТП, с целью выявления наиболее частых случаев ДТП, включая физические параметры, условия окружающей среды, характеристики водителя и пешехода. Кинематические уравнения, описывающие сценарии столкновения, также были выведены и испытаны для получения оценок минимального тормозного пути для различных скоростей транспортного средства и уровней торможения.Целью этого исследования было разработать обновленное понимание проблемы ДТП с участием пешеходов и потенциала технологии V2P для решения проблем ДТП с участием пешеходов.
См. Также:
Безопасность пешеходов NHTSA
Volvo Car Corporation — Ford Motor Company — Транспортный научно-исследовательский институт Мичиганского университета. Проект предупреждения о выезде с полосы движения.
Вместо того, чтобы ждать годами накопления данных о ДТП, оценка преимуществ безопасности новых систем предотвращения ДТП является важной областью постоянных исследований для НАБДД.НАБДД работает с отраслевыми партнерами над разработкой передовых методов моделирования и анализа, чтобы помочь оценить и спрогнозировать, как изменения в характеристиках характеристик системы могут повлиять на повышение безопасности полетов. В 2009 году NHTSA завершила четыре проекта с командами, возглавляемыми производителями автомобилей, которые сосредоточились на оценке преимуществ безопасности технологий, направленных на смягчение последствий лобовых столкновений (в первую очередь, наездов сзади), предотвращения обратного движения и предупреждения о выезде с полосы движения. В июне 2011 года NHTSA завершила два оставшихся проекта с командами, возглавляемыми производителями автомобилей, которые сосредоточились на технологиях, направленных на предотвращение лобовых столкновений, предотвращение съезда с полосы движения и обнаружение слепых зон.