знаки приоритета дорожного движения картинки с пояснениями
Ровно 13!
Это количество знаков приоритета дорожного движения, наверное именно из за него у нас так много ДТП на дорогах, а может из за того что мы плохо знакомы с ними, ну что ж давайте познакомимся поближе:
Позвольте Вам представить —ЗНАКИ ПРИОРИТЕТА!!!
В чем назначение знаков приоритета?
А нужны они для того, чтобы устанавливать очередность проезда перекрестков, узких участков дороги.
Главная дорога. Уступить дорогу.
Первый знак, который мы изучим это знак 2.1 – главная дорога.
На картинке внизу нарисован перекресток и стоит знак главная дорога, без дополнительной таблички 8.13 “Направление главной дороги”
Это значит, что что главная дорога сейчас не меняет свое направление.
Как сейчас будем пользоваться этим знаком?
А так! Машина, находящаяся на главной дороге, имеет права первым проехать этот перекресток. А машина, которая стоит на второстепенной дороге должна уступить дорогу. Естественно водитель видит знак 2.4 уступи дорогу
А машина, которая стоит на второстепенной дороге должна уступить дорогу. Естественно водитель видит знак 2.4 уступи дорогу
Но помним термин “уступить дорогу”
“Уступить дорогу (не создавать помех)” – требование, означающее, что участник дорожного движения не должен начинать, возобновлять или продолжать движение, осуществлять какой-либо маневр, если это может вынудить других участников движения, имеющих по отношению к нему преимущество, изменить направление движения или скорость.
Обратите внимание на точную его формулировку! Если вчитаться, то НЕ нужно стоять и ждать пока главный уедет, если нет точки пересечения траекторий.
Ну а что делать если на дороге одновременно два главных? И у них есть точка пересечения траектории?
А разбираться они сейчас будут по правилу помехи справа. Они сейчас оба главных, оба равны друг другу в правах, а когда водители равны между собой, они пользуются правилом помехи справа.
Если главная дорога меняет свое направление, то в данной ситуации разъезд производится попарно. Сначала разъезжаются те кто находится на главной дороге, а только потом уезжает второстепенные.
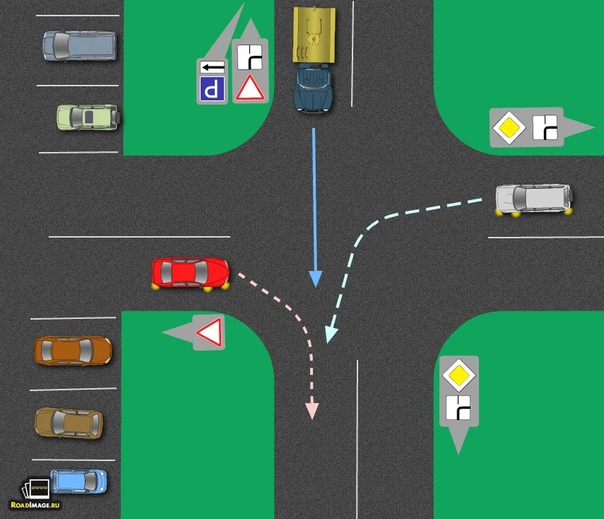
Разберем этот перекресток, подъехали одновременно 4 автомобиля с разных сторон, и что они видят?
Желтый знак приоритета главная дорога с табличкой направление главной дороги.
Синий то же самое. Сейчас эти два автомобиля находятся на главной дороге.
Зеленый и красный на второстепенной.
Очередность проезда будет такая – желтый – синий – зеленый – красный.
Движение без остановки запрещено.
К знакам приоритета так же относится и знак движение без остановки запрещено
Запрещается движение без остановки перед стоп линией,
знаком 6.16
А если ничего этого нет, то перед краем пересекаемой части, не создавая помех движения пешеходов.
Посмотрите та же самая картинка, что и выше, но знак уступи дорогу я заменил на знак движение без остановки запрещено. Здесь я применил этот знак, так как тут место с ограниченной видимостью и водитель красного автомобиля, который приближается с этого направления просто не видит, нужно ли кому-то уступать дорогу или нет.
Здесь я применил этот знак, так как тут место с ограниченной видимостью и водитель красного автомобиля, который приближается с этого направления просто не видит, нужно ли кому-то уступать дорогу или нет.
А уступать нужно! И уступать нужно с обязательной остановкой! Не просто подкатились и поехали, а именно с остановкой. Нужно зафиксировать неподвижно положения своего транспортного средства в необходимом месте.
Если на перекрестке есть знаки приоритета и работающей светофор, то знаки приоритета не работают и отдали свое управление перекрёстком светофору.
Пересечение со второстепенной дорогой.
Подгруппа знаков приоритета
То же относятся к знакам приоритета. Толстый штрих – главная дорога, тонкий штрих – это второстепенная.
Встречный разъезд.
Есть еще два знака
Но эти знаки не поставят на перекрестке, эти знаки будут регулировать очередность проезда в узких местах.
И у водителя, который движется на красную стрелку должен будет уступить дорогу. То есть если можно разъехаться одновременно, то можно будет ехать, но если случится ДТП то мы с Вами знаем кто будет виноват в данном ДТП.
То есть если можно разъехаться одновременно, то можно будет ехать, но если случится ДТП то мы с Вами знаем кто будет виноват в данном ДТП.
На этом все со знакам приоритета, подписывайтесь на обновления моего блога, будем разбираться вместе с тонкостями ПДД.
Знаки приоритета дорожного движения: картинки с пояснениями
Знаки приоритета — одни из самых важных в правилах дорожного движенияВторая группа дорожных знаков – это знаки приоритета. Пожалуй, самые важные знаки дорожного движения. Просто знаки приоритета применяются для того, чтобы регламентировать очередность проезда транспортных средств на пересечениях проезжих частей (в том числе, и перекрестках), а также на узких участках дороги (например, в местах проведения дорожно-ремонтных работ).
Знаки приоритета определяют очередность проезда на пересечениях и узких участках дорог
Несоблюдение принципов очередности проезда – это, наверное, самая «популярная» причина ДТП. Именно поэтому мы постараемся максимально эффективно рассмотреть эту группу дорожных знаков. Тем более, что она не так объемна.
Тем более, что она не так объемна.
Одно существенное замечание. Как правило, все дорожные знаки (за исключением знаков приоритета) имеют какую-либо единую форму или цветовую гамму. И только знаки приоритета не похожи друг на друга.
«Главная дорога» (2.1)
Наиболее популярное место установки знака – въезд на перекресток, а зона его действия чаще всего распространяется на перекресток (или пересечение проезжих частей). И в этой связи знак «Главная дорога» указывает водителю на то, что он въезжает на перекресток, где будет пользоваться преимуществом при его проезде.
Только важно помнить, что на перекрестке есть (как минимум!) два главных «въезда». И разъезжаться два транспортных средства, обладающие приоритетом, должны по правилу «правой руки», то есть уступая помехе справа, или уступить дорогу трамваю как — см. рисунок выше.
Очень часто знак «Главная дорога» устанавливается совместно с одним из вариантов таблички «Направление главной дороги» (8. 13). Это делается тогда, когда главная дорога на перекрестке меняет свое прямолинейное направление.
13). Это делается тогда, когда главная дорога на перекрестке меняет свое прямолинейное направление.
В этом случае правила проезда перекрестка не изменяются: приоритет имеют водители, выезжающие с главных направлений (соотнося очередность своего проезда с правилом «правом руки»).
Таким образом, знак «Главная дорога» указывает на преимущественное право проезда нерегулируемого перекрестка.
«Конец главной дороги» (2.2)
Название знака отвечает само за себя: он устанавливается перед перекрестком и указывает водителю на то, что он больше не будет обладать преимуществом, которым пользовался ранее — при проезде предшествующих перекрестков.
Если знак «Конец главной дороги» применяется автономно (не сочетаясь с другими знаками приоритета), то водитель должен расценивать грядущий перекресток в качестве равнозначного. При его проезде он обязан применять правило «правой руки» (уступить дорогу помехе справа).
Однако чаще всего указанный знак выставляется совместно со знаками «Уступите дорогу» (2.
Правила разрешают размещать этот знак, предварительно (на некотором расстоянии до перекрестка), а также повторно – непосредственно перед перекрестком.
«Пересечение с второстепенной дорогой» (2.3.1)
«Примыкание второстепенной дороги» (2.3.2 — 2.3.7)
Большое семейство «родственных» знаков, которые устанавливают, как правило, вне населенного пункта. Все эти знаки указывают водителю на то, что на перекрестке они будут двигаться по «жирной полосе», то есть пользоваться преимуществом перед водителями, двигающимися по пересекаемой (или примыкаемой) дороге.
Треугольная форма знаков с красной каймой делает их очень похожими на предупреждающие знаки. Это сходство не случайно: правила установки и одних, и других знаков совпадают – за 150-300 метров до соответствующего перекрестка вне населенного пункта и за 50-100 метров в населенном пункте.
«Уступите дорогу» (2.4)
Указанный знак, в отличие от предшествующих знаков приоритета, указывает водителю на то, что на данном перекрестке он должен будет предоставить преимущество водителям, которые двигаются по главной дороге.
В том случае если на перекрестке главная дорога меняет свое направление, знак «Уступите дорогу» устанавливается совместно с табличкой «Направление главной дороги» (8.13).
Знак может устанавливаться и перед выездами на главную дорогу с прилегающих территорий. Это делается в том случае, когда водители не будут иметь возможности однозначно определить приоритетность при проезде таких пересечений.
«Движение без остановки запрещено» (2.5)
Это единственный знак восьмиугольной формы. Оригинальная форма и цветовое решение не позволят спутать его с каким-либо другим знаком.
Видео — знаки приоритета дорожного движения с комментариями:
Знак предписывает водителю следующие действия: уступить дорогу водителям, которые двигаются по главной дороге и совершить обязательную кратковременную остановку. И даже если на главной дороге нет транспортных средств, которым надо предоставить преимущество, — все равно: совершение кратковременной остановки является обязанностью водителя.
И даже если на главной дороге нет транспортных средств, которым надо предоставить преимущество, — все равно: совершение кратковременной остановки является обязанностью водителя.
Таким образом, принцип действие знака «Движение без остановки запрещено» аналогичен знаку «Уступите дорогу». Но интересующий нас знак имеет дополнительное требование – обязательная кратковременная остановка.
Указанный знак применяется в двух основных случаях:
1) перед пересечениями (перекрестками), на которых не обеспечивается достаточная видимость транспортных средств, приближающихся к пересечению по главной дороге;
2) перед нерегулируемыми железнодорожными переездами (без светофора, шлагбаума и дежурного).
Требование знака об обязательном прекращении движения на таких участках позволит водителю адекватно оценить ситуацию и предпринять необходимые меры безопасности.
Принципиален вопрос о месте остановки водителя, двигающегося под данный знак.
Перед перекрестком останавливаться следует так:
1) перед стоп-линией;
2) при ее отсутствии – перед краем пересекаемой проезжей части.
Перед железнодорожным переездом правило остановки несколько иное:
1) так же перед стоп-линией;
2) при ее отсутствии – перед знаком.
Таким образом, знак «Движение без остановки запрещено», установленный перед пересечением, требует не только уступить дорогу, но и совершить кратковременную остановку (независимо от наличия и ли отсутствия транспортного средства, двигающегося по главной дороге).
«Преимущество встречного движения» (2.6)
«Преимущество перед встречным движением» (2.7)
Это «родственные» знаки с прямо противоположными принципами действия: первый обязывает уступить дорогу, а второй, напротив, извещает о преимущественном праве в движении.
Видео урок — знаки приоритета дорожного движения:
Возникает закономерный вопрос: «А для чего создавать еще одну пару знаков, говорящих о приоритете движения?». Дело в том, что указанная пара знаков никогда не выставляется на перекрестках и иных пересечениях. Они созданы специально для узких участков дороги, где затруднен встречный разъезд транспортных средств.
Они созданы специально для узких участков дороги, где затруднен встречный разъезд транспортных средств.
Первый знак — «Преимущество встречного движения» — по форме очень похож на запрещающие знаки. Это является лишним свидетельством того, что водитель, двигаясь под этот знак, обязан уступить дорогу встречным транспортным средствам.
Второй знак — «Преимущество перед встречным движением» — напоминает информационные знаки и, судя по названию, предоставляет водителю преимущество при проезде узкого участка дороги.
Двигаясь под этот знак, водитель имеет право проехать первым.
Подведем общий итог
Знаки приоритета – это очень важное средство регулирования дорожного движения. Они определяют очередность проезда пересечений и узких участков дороги.
И еще один важный и существенный момент: действие знаков приоритета отменяется сигналами регулировщика и светофора.
К примеру, на перекрестке, изображенном на рисунке, водитель не должен останавливаться под знак «Движение без остановки запрещено», потому что его действие отменено сигналами светофора.
Если вы только собираетесь покупать транспортное средство, можете скачать договор купли-продажи автомобиля бланк 2015 и посмотреть как его заполнять.
Как узнать штрафы ГИБДД онлайн можете прочитать тут, но, если будете соблюдать правила дорожного движения, штрафов у вас не будет.
Рассчитать расстояние между городами на автомобиле по карте — https://voditeliauto.ru/poleznaya-informaciya/interesnoe-dlya-voditelej/raschet-rasstoyanij.html, советуем сделать это заранее.
Видео — знаки приоритета ПДД:
Может заинтересовать:
Сканер для самостоятельной диагностики автомобиляДобавить свою рекламу
Как быстро избавиться от царапин на кузове автоДобавить свою рекламу
Товары для авто сравнить по цене и качеству >>>Добавить свою рекламу
В России вступают в силу единые правила движения транспорта на круговых перекрестках — Общество
МОСКВА, 8 ноября. /ТАСС/. Поправки в правила дорожного движения, унифицирующие в России регламент проезда транспорта через перекрестки с круговым движением, вступают в силу в среду, сообщили ТАСС в пресс-центре МВД РФ. Ранее в разных регионах страны, а порой даже в пределах одного города схемы проезда перекрестков с круговым движением отличались друг от друга, что приводило к образованию на них заторов и ДТП.
/ТАСС/. Поправки в правила дорожного движения, унифицирующие в России регламент проезда транспорта через перекрестки с круговым движением, вступают в силу в среду, сообщили ТАСС в пресс-центре МВД РФ. Ранее в разных регионах страны, а порой даже в пределах одного города схемы проезда перекрестков с круговым движением отличались друг от друга, что приводило к образованию на них заторов и ДТП.
В МВД отметили, что теперь водитель автомобиля, въезжая на круговой перекресток равнозначных дорог, обозначенный дорожным знаком «Круговое движение», обязан уступить дорогу другим транспортным средствам, уже движущимся по кругу.
Подписанные постановления
В конце октября председатель правительства РФ Дмитрий Медведев подписал два постановления, вносящих значительные изменения в правила дорожного движения в России.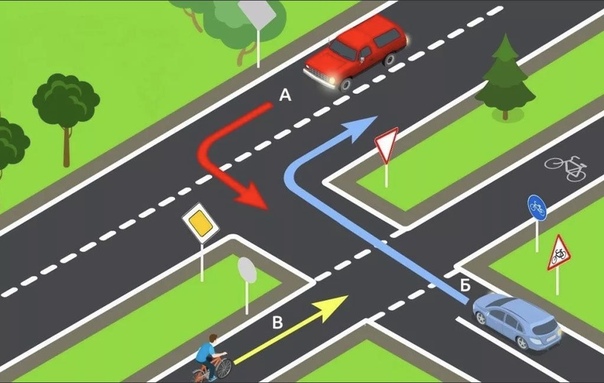 Первое вводит новую диагональную разметку «вафельница» на перекрестках, а второе постановление изменяет приоритет при проезде автомобилями участков с круговым движением.
Первое вводит новую диагональную разметку «вафельница» на перекрестках, а второе постановление изменяет приоритет при проезде автомобилями участков с круговым движением.
По словам Медведева, первое постановление призвано навести порядок на наиболее проблемных участках — на перекрестках с пересекающими транспортными потоками, где часто возникают заторы, причем не всегда из-за сложного трафика, а просто из-за недостаточной культуры вождения. Глава кабмина также уточнил, что теперь регионы получат право наносить на перекрестках специальную дорожную разметку, чтобы водителям было легче ориентироваться.
Второе постановление меняет приоритетность проезда на круге. Премьер-министр подчеркнул, что правила проезда таких участков в РФ разные в зависимости от региона, что вводило путаницу в правила дорожного движения. По его мнению, избежать возникновения аварийных ситуаций на круге позволят единые правила — «приоритет проезда получает тот, кто движется по самому кругу, а въезжающим придется уступать дорогу», сказал глава кабмина. Как уточнил Медведев, такая практика существует практически во всех европейских странах и доказала свою эффективность.
Как уточнил Медведев, такая практика существует практически во всех европейских странах и доказала свою эффективность.
Пояснения Шувалова
Курирующий в правительстве в том числе тему безопасности дорожного движения первый вице-премьер Игорь Шувалов согласился с главой кабмина в том, что в РФ не было единообразной практики и из-за этого возникала путаница, которая приводила к тяжелым последствиям.
По словам Шувалова, практика нанесения диагональной разметки на перекрестках широко используется во всем мире и водитель, видя такую разметку, должен понимать, что на этом участке дороги часто случаются заторы и он обязан завершить маневр, не создавая препятствий другим участникам движения. Кроме того, на таких перекрестках, сказал он, будет предусмотрена видеофиксация для выявления нарушителей.
По данным, приведенным Шуваловым, по состоянию на 1 октября количество ДТП в России снизилось на 6,1%, а число погибших в них граждан снизилось на 10% по сравнению с аналогичным периодом 2016 года.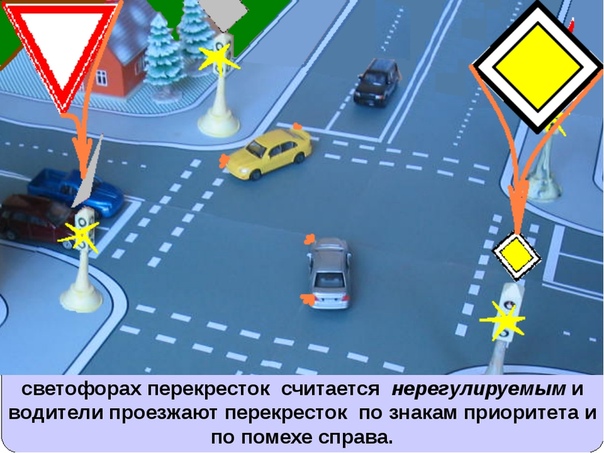 Также за девять месяцев года отмечается снижение ДТП с участием пьяных водителей, таких происшествий стало меньше почти на 20%. Количество ДТП с участием детей незначительно снизилось за январь-сентябрь текущего года на 0,1%, сказал Шувалов.
Также за девять месяцев года отмечается снижение ДТП с участием пьяных водителей, таких происшествий стало меньше почти на 20%. Количество ДТП с участием детей незначительно снизилось за январь-сентябрь текущего года на 0,1%, сказал Шувалов.
|
Очерёдность проезда на перекрёстках чаще всего регулируется светофорами или регулировщиками. А на тех перекрёстках, где нецелесообразно устанавливать светофор или же он по каким-либо причинам не работает, очерёдность регулируется дорожными знаками. Группа знаков, которые регулируют очерёдность проезда на сложных участках дороги (нерегулируемые перекрёстки, мосты, железнодорожные переезды, места проведения ремонтных работ и и.д.) называется знаками приоритета. Основные особенности дорожных знаков приоритета
В соответствии с ПДД, знаки приоритета, за исключением группы знаков 2. Знаки приоритета могут иметь разную форму: треугольную, круглую, квадратную или шестиугольную. Эти знаки оказывают воздействие только на нерегулируемых перекрёстках. Если же рядом со знаком приоритета имеется работающий светофор, водитель обязан руководствоваться только его сигналами. Знаками приоритета на регулируемых перекрёстках следует руководствоваться тогда, когда светофор неисправен, отключён (например, в тёмное время суток) или работает в режиме мигающего жёлтого света.
На нашем портале представлены все знаки приоритета с картинками, описанием и подробными пояснениями, что позволяет быстро и легко изучить эту группу знаков и не делать ошибок на дорогах.
|
Водитель должен уступить дорогу |
Знак 2.5 может быть установлен перед железнодорожным переездом или карантинным постом. |
Водитель должен уступить дорогу встречным транспортным средствам, находящимся на узком участке или противоположном подъезде к нему. |
|
 3 (2.3.1 – 2.3.7) устанавливаются непосредственно перед сложным участком дороги. Знаки группы 2.3, как и предупреждающие знаки, устанавливаются на расстоянии 50 – 100 метров от обозначаемого объекта в черте населённого пункта, и за 150 – 300 метров – за его чертой.
3 (2.3.1 – 2.3.7) устанавливаются непосредственно перед сложным участком дороги. Знаки группы 2.3, как и предупреждающие знаки, устанавливаются на расстоянии 50 – 100 метров от обозначаемого объекта в черте населённого пункта, и за 150 – 300 метров – за его чертой.
 В этих случаях водитель должен остановиться перед стоп-линией, а при ее отсутствии — перед знаком.
В этих случаях водитель должен остановиться перед стоп-линией, а при ее отсутствии — перед знаком.Знаки приоритета: главная дорога, конец главной дороги, пересечение со второстепенной дорогой, примыкание второстепенной дороги, уступите дорогу, движение без остановки запрещено, преимущество встречного движения, преимущество перед встречным движением — АвтоРазборка
Знаки приоритета устанавливают очередность проезда перекрестков, пересечений проезжих частей или узких участков дороги. К каждому дорожному знаку приоритета дан комментарий, поясняющий действие знака дорожного движения в той или иной ситуации. В данный раздел входят всего 13 дорожных знаков, однако именно они определяют порядок разъезда автомобилей в различных ситуациях.
К каждому дорожному знаку приоритета дан комментарий, поясняющий действие знака дорожного движения в той или иной ситуации. В данный раздел входят всего 13 дорожных знаков, однако именно они определяют порядок разъезда автомобилей в различных ситуациях.
2.1 Главная дорога
Дорога, на которой предоставлено право преимущественного проезда нерегулируемых перекрестков.
Устанавливается непосредственно перед перекрестком.
Знак «Главная дорога» обозначает дорогу, на которой автомобилям дается право преимущественного проезда нерегулируемых перекрестков. Т.е. автомобили, находящиеся на главной дороге, имеют преимущество перед автомобилями на второстепенной.
Если дорожный знак «Главная дорога» установлен перед перекрестком без дополнительной таблички, то это свидетельствует о том, что главная дорога проходит через перекресток в прямом направлении.
Еще одна особенность знака главная дорога — это зона его действия.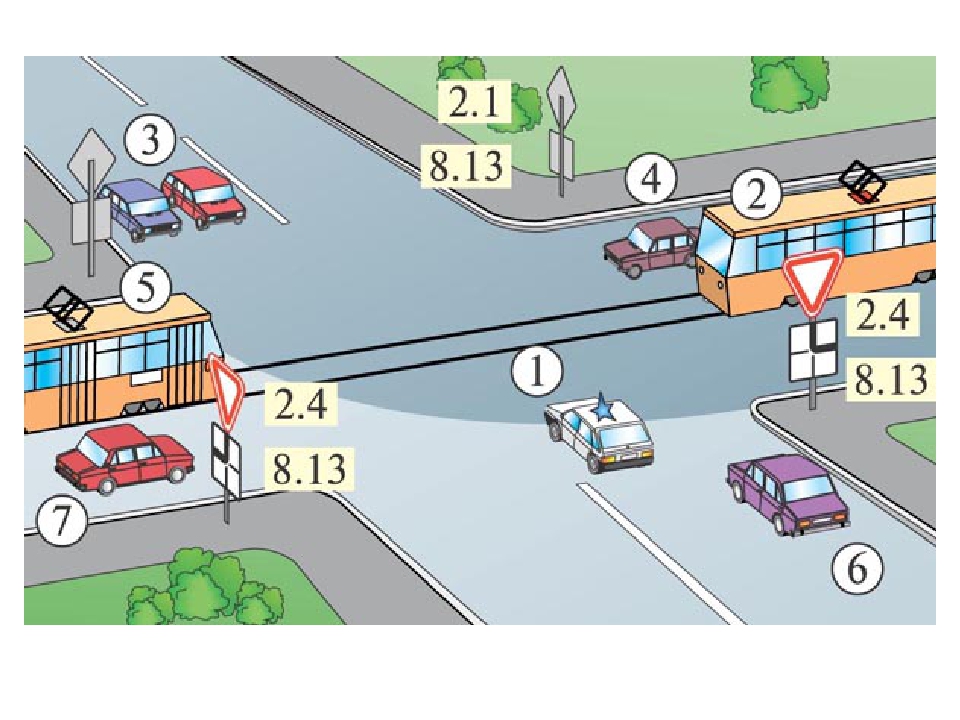 Дорога остается главной ровно до тех пор, пока на ней не появится знак «конец главной дороги». Другие условия для отмены данного знака в правилах дорожного движения не предусмотрены.
Дорога остается главной ровно до тех пор, пока на ней не появится знак «конец главной дороги». Другие условия для отмены данного знака в правилах дорожного движения не предусмотрены.
ПОМНИТЕ! На такой дороге Ваше преимущество может кончиться неожиданно для Вас в случае пересечения с транспортными средствами со спец.сигналами (скорая помощь, пожарная машина и т.п.).
Примечание. Вне населенных пунктов на дорогах, обозначенных знаком главная дорога, запрещена стоянка на проезжей части.
2.2 Конец главной дороги
Действие знака 2.1 «Главная дорога» кончилось. Конец преимущественного проезда нерегулируемых перекрестков.
Дорожный знак конец главной дороги используется для того, чтобы указать водителю на окончание дороги, на которой он имеет право преимущественного проезда нерегулируемых перекрестков:
Внимание! Этот знак не делает дорогу второстепенной автоматически. То есть если перед перекрестком установлен только знак «конец главной дороги», то перекресток является равнозначным.
То есть если перед перекрестком установлен только знак «конец главной дороги», то перекресток является равнозначным.
2.3.1 Пересечение со второстепенной дорогой
Предоставляет право преимущественного проезда нерегулируемого перекрестка транспортным средствам, находящимся на главной дороге.
Устанавливается непосредственно перед перекрестком.
Знак пересечение со второстепенной дорогой показывает, что на следующем перекрестке «Ваша» дорога будет пересекать второстепенную. Вы имеете преимущество при проезде нерегулируемого перекрестка.
На данных перекрестках разрешается обгон на дороге, являющейся главной по отношению к пересекаемой.
2.3.2, 2.3.3, 2.3.4, 2.3.5, 2.3.6, 2.3.7 Примыкание второстепенной дороги
Предупреждает о близости примыкания второстепенной дороги слева и справа.
Устанавливается непосредственно перед перекрестком.
Знак примыкание второстепенной дороги по своему значению аналогичен предшествующему знаку. Единственное различие состоит в том, что второстепенная дорога примыкает лишь с одного направления, т.е. перекресток является Т-образным. Этот знак дает водителю преимущество при проезде перекрестка.
На перекрестках, обозначенных знаками 2.3.2-2.3.7 разрешается обгон на дороге, являющейся главной по отношению к пересекаемой.
2.4 Уступите дорогу
Водитель должен уступить дорогу транспортным средствам, движущимся по пересекаемой дороге, а при наличии таб.8.13 — по главной.
Устанавливается непосредственно перед перекрестком (или у пересечения проезжих частей).
Дорожный знак уступите дорогу (в народе — уступи дорогу) означает, что на нерегулируемом перекрестке Вы не должны создавать помех транспортным средствам, движущимся по главной дороге.
Помните, что согласно ПДД термин уступить дорогу обозначает, что водитель автомобиля не должен начинать, возобновлять или продолжать движение, если это вынудит участников движения, имеющих преимущество, изменить скорость или направление движения.
При этом знак уступи дорогу, не требует обязательной остановки перед перекрестком.
Где остановиться (если потребуется), чтобы уступить дорогу? Вы не должны возобновлять или продолжать движение, осуществлять какой-либо маневр, если действие Вашего автомобиля вынудит других участников движения изменить направление движения или скорость. Поэтому, в случае необходимости, место остановки выбирайте сами, руководствуясь вышеназванным правилом.
2.5 Движение без остановки запрещено
Запрещается движение без остановки перед стоп-линией, а если ее нет — перед краем пересекаемой проезжей части. Водитель должен уступить дорогу ТС, движущимся по пересекаемой, а при наличии таб.8.13 — по главной дороге. Знак 2.5 может быть установлен перед железнодорожным переездом или карантинным постом. В этих случаях водитель должен остановиться перед стоп-линией, а при ее отсутствии — перед знаком.
Устанавливается у пересечения проезжих частей или у ж/д переезда и т. д.
Знак движение без остановки запрещено является «усиленной» версией знака уступите дорогу. От предыдущего знака он отличается тем, что водитель должен обязательно остановиться перед стоп-линией или краем пересекаемой проезжей части.
Кроме перекрестков знак может устанавливаться и перед железнодорожными переездами. В этом случае водителю следует остановиться перед стоп-линией, а при её отсутствии — перед самим знаком. Как правило, знак «движение без остановки запрещено» устанавливается перед перекрестками с ограниченной видимостью, на которых происходит большое количество дорожно-транспортных происшествий, поэтому игнорировать его нельзя ни в коем случае.
Необходимо учитывать, что остановка обязательна, если знак установлен у пересечения проезжих частей — у стоп-линии (если она нанесена на проезжую часть), а если ее нет — не обязательно останавливаться на уровне знака, водитель может остановиться, проехав знак, но не далее границы пересечений. Если знак установлен у ж/д переезда и т.д. — водитель обязан остановиться или у стоп-линии или, при ее отсутствии, — до знака. В этом случае остановка за знаком считается нарушением ПДД.
Примечание. В случае работы светофора данным знаком не руководствуются.
2.6 Преимущество встречного движения
Запрещается въезд на узкий участок дороги, если это может затруднить встречное движение. Водитель должен уступить дорогу встречным транспортным средствам, находящимся на узком участке или противоположном подъезде к нему.
Если на знаке желтый фон, то знак является временным.
В отличие от рассмотренных выше знаков, которые чаще всего устанавливаются перед перекрестками, знак преимущество встречного движения устанавливается на узких участках дорог, где затруднен встречный разъезд. Знак «преимущество встречного движения» указывает водителю, что он должен уступить дорогу встречным транспортным средствам на узком участке дороги. Этот знак обычно устанавливается в местах проведения дорожных работ и на узких мостах.
В случаях если значения временных дорожных знаков и стационарных дорожных знаков противоречат друг другу, водители должны руководствоваться временными знаками.
2.7 Преимущество перед встречным движением
Узкий участок дороги, при движении по которому водитель пользуется преимуществом по отношению к встречным транспортным средствам.
Знак преимущество перед встречным движением является полной противоположностью предыдущего. Т.е. он дает водителю право преимущественного проезда узкого участка дороги. При этом если на узком участке дороги уже находятся встречные автомобили, то сначала следует пропустить их, а лишь затем пользоваться своим преимущественным правом.
Эти два знака (2.6 и 2.7) существовать друг без друга не могут. Если с одной стороны узкого участка стоит знак 2.6, то с другой стороны обязательно стоит знак 2.7.
Важный момент
Всегда приоритет у машин спецслужб со звуковой сиреной и проблесковыми маячками и у автобусов, при начале движения после остановки. Независимо от наличия знаков, водитель обязан пропустить такой транспорт. Также, на главной дороге преимущество у рельсового транспорта. При повороте трамвая направо через попутный поток, его обязаны пропустить.
Отличительная особенность знаков приоритета от других групп — это уникальность формы. Треугольник несет функцию предупреждения. А восьмиугольный знак «Движение без остановки запрещено» аналогов формы не имеет.
Штрафы за нарушение предупреждающих знаков
Рассмотрим штрафы, которые может получить водитель за нарушение требований предупреждающих знаков.
В случае нарушения водителем требований знаков приоритета ответственность наступает по ст. 12 КоАП РФ:
Не уступил дорогу – штраф 1000 руб.;
Остановился за знаком «Движение без остановки запрещено» при наличии стоп-линии, штраф составит 800 руб.;
Не пропустил встречный поток вразрез указаниям знака «Преимущество встречного движения» – штраф 500 руб. или предупреждение.
Давайте на примере рассмотрим несколько вопросов из билетов ПДД «А» «Б» «М» на эту тему:
Какие из указанных знаков предоставляют право преимущественного проезда нерегулируемых перекрестков?
1. А и В.
2. Только А.
3. Все.
Пояснение:
Право преимущественного проезда нерегулируемых перекрестков предоставляют знаки, обозначающие главную дорогу (п. 1.2 , термин «Главная дорога»): знаки 2.1 «Главная дорога» (А) и 2.3.5 «Примыкание второстепенной дороги» (В). Знак 2.7 «Преимущество перед встречным движением» (Б) применяется на узких участках дорог, где затруднен встречный разъезд.
Вопрос:
Почему знак преимущество перед встречным движением не является правильным? А главная дорога и примыкание второстепенной правильно.
Ответ:
В вопросе говорится о знаках, которые предоставляют право преимущественного проезда нерегулируемых перекрестков. Знак 2.7 «Преимущество перед встречным движением» (Б) не применяется на перекрестках.
Какие из указанных знаков требуют обязательной остановки?
1. Только А.
2. Только Б.
3. Б и В.
4. Все.
Пояснение:
Только знак Б (2.5 «Движение без остановки запрещено») обязывает водителей остановиться у стоп-линии, а при ее отсутствии — перед краем пересекаемой проезжей части, на железнодорожных переездах — перед этим знаком. Знак В (6.16 «Стоп-линия») показывает лишь место остановки транспортных средств при запрещающем сигнале светофора или регулировщика. Знаки Г (2.4 «Уступите дорогу») и А (2.6 «Преимущество встречного движения») обязывают водителя уступить дорогу соответственно на пересечении дорог или ее узком участке, не требуя при этом обязательной остановки.ПДД 2021 | Проезд перекрестков ПДД
ПДД 2020, 2021 с комментариями онлайн
13.1. При повороте направо или налево водитель обязан уступить дорогу пешеходам и велосипедистам, пересекающим проезжую часть дороги, на которую он поворачивает.
Это указание действует на всех перекрестках для водителей, поворачивающих как налево, так и направо. На перекрестках движением пешеходов и велосипедистов могут управлять специальные светофоры. В таком случае пешеходы и велосипедисты имеют право начать движение через перекресток только при разрешающем сигнале соответствующего светофора.
13.2. Запрещается выезжать на перекресток, пересечение проезжих частей или участка перекрестка, обозначенного разметкой 1.26, если впереди по пути следования образовался затор, который вынудит водителя остановиться, создав препятствие для движения транспортных средств в поперечном направлении, за исключением поворота направо или налево в случаях, установленных настоящими Правилами…
Прежде чем заехать на перекресток, следует оценить обстановку за ним в том направлении, куда пролегает ваш путь. Если на перекрестке или за перекрестком образовался затор, нужно дождаться пока он не рассосется, не выезжая при этом на перекресток. Дорожная разметка 1.26 (вафельница) обозначает участок перекрестка, на который въезд в случае затора за перекрестком запрещен. Подробности — в статье Участок перекрестка в ПДД с 28 апреля 2018 года.
13.3. Перекресток, где очередность движения определяется сигналами светофора или регулировщика, считается регулируемым.
При желтом мигающем сигнале, неработающих светофорах или отсутствии регулировщика перекресток считается нерегулируемым, и водители обязаны руководствоваться правилами проезда нерегулируемых перекрестков и установленными на перекрестке знаками приоритета.
Главным признаком регулируемого перекрестка является сам факт регулирования светофором (в режиме красный-желтый-зеленый) или регулировщиком очередности проезда перекрестка, а не просто наличие их на перекрестке.
Вместе со светофорами перед перекрестком устанавливают знаки приоритета. Если сигнал светофора противоречит требованиям знаков приоритета, то в соответствии с указанием пункта 6.15 ПДД водители должны руководствоваться сигналами светофора.
Знаки приоритета, расположенные совместно со светофором, вступят в действие только в случае, когда светофор выключится или перейдет в режим желтого мигающего сигнала.
Регулируемые перекрестки
13.4. При повороте налево или развороте по зеленому сигналу светофора водитель безрельсового транспортного средства обязан уступить дорогу транспортным средствам, движущимся со встречного направления прямо или направо. Таким же правилом должны руководствоваться между собой водители трамваев.
При одновременном со встречным автомобилем повороте налево на перекрестке Правила не регламентируют порядок разъезда. На подавляющем большинстве перекрестков разъезд встречных ТС правыми бортами не противоречит ПДД. Подробнее об этом – в статье Проезд перекрестков. Въезд и выезд — общие правила.
Поворот налево или разворот на перекрестке это почти всегда пересечение траекторий движения с встречным транспортом, и как следствие, возникновение напряженных ситуаций. Основные из них рассмотрены в статье Поворот налево и разворот на перекрестках. Опасные ситуации. Проезд перекрестков с поворотом налево, в соответствии с ПДД, а также внештатные ситуации на этих маневрах рассмотрены в статьях Поворот налево на перекрестке, часть 1 и Поворот налево на перекрестке, часть 2.
13.5. При движении в направлении стрелки, включенной в дополнительной секции одновременно с желтым или красным сигналом светофора, водитель обязан уступить дорогу транспортным средствам, движущимся с других направлений.
Проезд перекрестков и движение транспортных средств на зеленую стрелку в дополнительной секции светофора рассмотрено в ответах на вопросы в серии статей Проезд под стрелку светофора. Различия в приоритетах во время движения на зеленую стрелку в дополнительной секции, включенную одновременно с красным или желтым сигналом светофора рассмотрены в статье Поворот направо и пункт 8.6 ПДД.
13.6. Если сигналы светофора или регулировщика разрешают движение одновременно трамваю и безрельсовым транспортным средствам, то трамвай имеет преимущество независимо от направления его движения. Однако при движении в направлении стрелки, включенной в дополнительной секции одновременно с красным или желтым сигналом светофора, трамвай должен уступить дорогу транспортным средствам, движущимся с других направлений.
Подробнее о преимуществе трамвая на регулируемом перекрестке — в статье Проезд перекрестка с трамвайными путями.
13.7. Водитель, въехавший на перекресток при разрешающем сигнале светофора, должен выехать в намеченном направлении независимо от сигналов светофора на выходе с перекрестка. Однако, если на перекрестке перед светофорами, расположенными на пути следования водителя, имеются стоп-линии (знаки 6.16), водитель обязан руководствоваться сигналами каждого светофора.
Выехав при зеленом сигнале светофора на перекресток для поворота, на выезде с перекрестка водитель может увидеть красный сигнал, который не имеет к нему отношения и просто дублирует основной светофор, установленный на пересекаемой дороге. Но если этот перекресток сложный, на нем могут быть установлены дополнительные таблички 6.16 «Стоп-линия» или нанесена соответствующая разметка. В таком случае водитель должен руководствоваться сигналами каждого встречающегося на его пути светофора и при запрещающем сигнале останавливаться перед стоп-линией.
13.8. При включении разрешающего сигнала светофора водитель обязан уступить дорогу транспортным средствам, завершающим движение через перекресток, и пешеходам, не закончившим переход проезжей части данного направления.
Если вы стоите на светофоре и перед вами включился его зеленый сигнал, то прежде чем въехать на перекресток, следует убедиться, что весь транспорт, который въехал на него при предыдущем разрешающем сигнале светофора с другого направления, покинул перекресток, а пешеходы закончили свой переход проезжей части вашего направления. В противном случае возникает риск столкновения с ТС, завершающими проезд перекрестка. Один из таких случаев рассмотрен в статье Проезд на только что включившийся зеленый.
Нерегулируемые перекрестки неравнозначных дорог
13.9. На перекрестке неравнозначных дорог водитель транспортного средства, движущегося по второстепенной дороге, должен уступить дорогу транспортным средствам, приближающимся по главной, независимо от направления их дальнейшего движения.
Определение термина «Главная дорога» приведено в пункте 1.2 ПДД. В дополнение рекомендую ознакомиться со статьей Как определить главную дорогу, если нет знаков. Более подробно о проезде перекрестков неравнозначных дорог, а также о соблюдении мер безопасности, для того, чтобы избежать непредвиденного столкновения, можно прочесть в серии статей Главная дорога.
На таких перекрестках трамвай имеет преимущество перед безрельсовыми транспортными средствами, движущимися в попутном или встречном направлении по равнозначной дороге, независимо от направления его движения.
Подробнее о преимуществе трамвая на нерегулируемом перекрестке — в статье Проезд перекрестка с трамвайными путями.
13.10. В случае, когда главная дорога на перекрестке меняет направление, водители, движущиеся по главной дороге, должны руководствоваться между собой правилами проезда перекрестков равнозначных дорог. Этими же правилами должны руководствоваться водители, движущиеся по второстепенным дорогам.
Водители безрельсового транспорта, находящиеся в равной ситуации (оба на главной дороге или оба на второстепенной), разъезжаются по «правилу правой руки», т.е. уступает тот, у кого помеха справа. Трамваи при одновременном праве на движение с безрельсовым транспортом имеют преимущество.
Если трамвай находится на главной дороге, то он имеет преимущество перед транспортом, находящимся и на главной, и на второстепенной дорогах. Если трамвай находится на второстепенной дороге, то он имеет преимущество только перед безрельсовым транспортом, также находящимся на второстепенной дороге, и уступает всем, находящимся на главной дороге.
Общие правила проезда нерегулируемых перекрестков при наличии на них только безрельсового транспорта:
- Первыми покидают перекресток ТС, находящиеся на главной дороге. Если их траектории пересекаются (сливаются), то водители указанных ТС между собой руководствуются «правилом помеха справа».
- Последними покидают перекресток ТС, находящиеся на второстепенной дороге. Если их траектории пересекаются (сливаются), то водители указанных ТС также между собой руководствуются «правилом помеха справа».
- ТС с включенным синим проблесковым маячком и специальным звуковым сигналом имеют преимущество перед остальными транспортными средствами независимо от того, по какой дороге они приближаются к перекрестку.
Нерегулируемые перекрестки равнозначных дорог
13.11. На перекрестке равнозначных дорог, за исключением случая, предусмотренного пунктом 13.11 (1) Правил, водитель безрельсового транспортного средства обязан уступить дорогу транспортным средствам, приближающимся справа. Этим же правилом должны руководствоваться между собой водители трамваев.
На таких перекрестках трамвай имеет преимущество перед безрельсовыми транспортными средствами независимо от направления его движения.
По теме безопасности проезда перекрестков равнозначных дорог для безрельсовых ТС рекомендую Проезд равнозначного перекрестка и Разъезд на равнозначном перекрестке.
13.11 (1). При въезде на перекресток, на котором организовано круговое движение и который обозначен знаком 4.3, водитель транспортного средства обязан уступить дорогу транспортным средствам, движущимся по такому перекрестку.
Данный пункт введен в ПДД с 8 ноября 2017 года. Новые правила проезда перекрестков с круговым движением описаны в одноименной статье: Проезд перекрестков с круговым движением.
13.12. При повороте налево или развороте водитель безрельсового транспортного средства обязан уступить дорогу транспортным средствам, движущимся по равнозначной дороге со встречного направления прямо или направо. Этим же правилом должны руководствоваться между собой водители трамваев.
Правила поворота налево и разворота безрельсовых ТС, проезжающих нерегулируемый перекресток по равнозначной дороге, аналогичны правилам поворота и разворота по зеленому сигналу светофора: нужно уступить встречным ТС, которые едут прямо или направо. Возникающие опасные ситуации также аналогичны. Правила разворота, в т.ч. на перекрестках, подробно описаны в серии статей Разворот. Рекомендую серию статей Дорожные ситуации. Выполнение разворота.
13.13. Если водитель не может определить наличие покрытия на дороге (темное время суток, грязь, снег и тому подобное), а знаков приоритета нет, он должен считать, что находится на второстепенной дороге.
Как определить по какой дороге вы подъезжаете к перекрестку, по главной или второстепенной — в одноименной статье Как определить главную дорогу, если нет знаков из серии Главная дорога.
Дорожные знаки приоритета: картинки и пояснения
Знаки приоритета регулируют очередность проезда перекрестков и узких участков дорог. Сообщают участникам дорожного движения о том, кто из них имеет первоочередное право проезда, а кто обязан уступить. Часто размещаются в паре со знаками дополнительной информации, например, когда главная дорога меняет свое направление.Приоритет утрачивает силу по отношению к транспорту со спец. сигналами. Помните, что вы обязаны пропускать машины скорой помощи, полиции, пожарной службы, если они движутся со включенной сиреной и проблесковыми маячками.
Частые вопросы:
- что в приоритете, знаки или разметка?
- знаки или светофор?
Если знаки и разметка противоречат друг другу, руководствоваться следует знаками.
Работающий светофор отменяет знаки приоритета.
Преимущество встречного движения (2.6)
Запрещает водителю въезжать на узкий участок дороги, если этим он затруднит встречное движение. Необходимо уступить право проезда движущимся навстречу транспортным средствам, находящимся на узком участке, или подъезжающим к нему.
Исключение составляют случаи, когда автомобиль не создает помех встречному ТС, например, мотоциклу без коляски.
Знак выполненный на желтом фоне является временным и имеют приоритет перед обычными. Если временный противоречит постоянным, он автоматически отменяет их действие.
О дорожных знаках
Все, что должен и обязан знать и, несомненно, выполнять описывается в ПДД. Дорожные знаки, зоны действия каждой группы содержатся в Правилах. Не зная этих основ, водитель сразу же попадет в ДТП, едва выехав на дорогу.
Каждый дорожный знак имеет свое название. И обязанностью любого водителя является их изучение. Человек, управляющий транспортным средством, в первую очередь должен вспомнить название знака. Это является основой. Затем проще будет определить, что он значит, и где действует.
Немаловажные знания — зона их действия. У каждой группы знаков она своя. Так называется расстояние, на котором водитель, в обязательном порядке, должен подчиняться тому или иному техническому элементу организации движения. Без этих знаний он никогда не узнает, можно ли ему сворачивать, понизить или повысить скорость, развернуться и прочее.
Давайте рассмотрим некоторые знаки.
Видео
Что еще стоит почитать
Запрещающие знаки
Предписывающие знаки
Особые предписания
Информационные знаки
Знаки сервиса
Вертикальная разметка
Предупреждающие
Данные технические средства организации движения сообщают заранее о предстоящей опасности.
Зона действия дорожных знаков, сообщающих о приближении к участку дороги, на котором водителю придется предпринять меры, соответствующие обстановке, не определена. Ведь основное свойство данных элементов дороги — это предупреждение. Они устанавливаются вне города за 150-300 м от опасной зоны, а в нем — за 50-100 м. Некоторые повторяются, для привлечения внимания водителей.
Обязанностью управляющего транспортным средством является своевременное распознание предупреждающих технических средств организации движения и принятие соответствующих мер.
Знаки приоритета
Одна из самых немногочисленных групп. Однако важность от этого они не теряют. При помощи знаков приоритета регулируется проезд перекрестков, определяют очередность проезда на узких участках дороги и других местах, где отсутствуют светофоры или регулировщик. То есть данная группа указывает, кто должен проехать первым, а кто уступить.
Зона действия дорожных знаков приоритета распространяется на перекресток, перед которым они установлены. Стоит отметить, что если на пересечении присутствуют и светофор, и данные средства регулирования движения, то очередность проезда решается первым. Знаки теряют свою силу и попросту не учитываются.
Располагаются они либо непосредственно перед перекрестком, либо за 50-100 м в городе, а вне его — за 150-300 м. Исключением является знак «Главная дорога». Он повторяется. Первый знак вне города располагается за 100-150 метров, а второй — непосредственно перед перекрестком.
Это правило действует только в том случае, когда главная дорога меняет свое направление, то есть не продолжается прямо. Тогда под ним устанавливается табличка, которая указывает, куда она сворачивает.
Информационные знаки
Сообщают о нахождении населённого пункта или какого либо другого объекта, а также о рекомендуемом или необходимом скоростном режиме.
Важно! Пешеход должен быть внимательным и соблюдать правила наравне с водителями автотранспорта.
Для пешеходов актуальны такие обозначения:
Знаки «Преимущество встречного движения» (2.6) и «Преимущество перед встречным движением» (2.7)
В городских условиях могут встречаться участки дороги, где одновременный проезд двух автомобилей невозможен из-за недостаточной ширины проезжей части. При затрудненном разъезде определять очередность движения водители должны в соответствии с установленными знаками приоритета проезда (абзац 1 Приложения 1 к ПДД).
Для регулирования очередности проезда автомобилей в узких местах устанавливаются таблички 2.6 и 2.7:
В соответствии с Приложением 1 к ПДД знак 2.6 «Преимущество встречного движения» устанавливает запрет проезда узкого промежутка дороги, если это создаст препятствия для автомобилей противоположного потока. Водитель, перед которым находится этот знак, обязан пропустить ТС, движущиеся по узкому участку либо подъезжающие к нему.
Знак 2.7 «Преимущество перед встречным движением» противоположен предыдущему. Водитель, перед которым он установлен, получает первоочередное право движения перед встречными автомобилями.
Красная стрелка всегда указывает на сторону, которая должна пропускать.
Рассматриваемые таблички являются парными и никогда не устанавливаются по одной. Если с одной стороны дороги стоит знак приоритета для встречного движения, с другой — обязательно будет указатель 2.7, наделяющий преимуществом.
Пунктом 5.3.10 ГОСТ Р 52289-2004 закреплены правила размещения указанных знаков. Они устанавливаются непосредственно в местах, где одновременный проезд транспортных средств противоположных потоков создает трудности или опасности для водителей. Также таблички устанавливаются перед мостами с двусторонним движением, если ширина полотна менее 6 метров.
Знак, обязывающий водителя предоставить преимущество (2.6), может быть установлен заранее вместе с табличкой, указывающей на оставшееся расстояние (8.1.1), и другим указателем, оповещающем о скором сужении проезжей части (1.20.1–1.20.3.).
Рассматриваемые указатели не ставятся перед перекрестками. Приоритет проезда на пересечениях дорог регулируется иными табличками из раздела 2 Приложения 1 к ПДД.
Зона действия информационно-указательных
Эта группа технических средств организации дорожного движения вводит или отменяет режимы проезда, сообщает о местонахождении населенных пунктов и других объектов. Как таковой зоны действия у них нет. Дорожные знаки этой группы располагаются вдоль проезжей части, а отменяются такими же, но с диагональной красной линией.
Последние сообщают о прекращении действия. К примеру, синий прямоугольник с белой стрелкой, острие которой направлено вверх — говорит о том, что на данной проезжей части нет встречной полосы. Зона действия завершается после знака «Конец дороги с односторонним движением». Визуально это то же самый прямоугольник с белой стрелой, но уже на котором она перечеркнута диагональной красной линией справа налево.
Однако некоторые могут устанавливаться со знаком дополнительной информации. На нем указывается протяженность действия информационно-указательных устройств организации проезда. Устанавливаются и «читаются» данные сочетания аналогично предупреждающим знакам плюс табличка.
В обязанности водителей входит соблюдение режимов движения, которые вводит или отменяет данная группа. А также принимать во внимание информацию, которая указывается на данных технических средствах организации проезда.
Зона действия запрещающих дорожных знаков
Эта группа средств организации движения вводит или наоборот отменяет определенные ограничения в некоторых местах на проезжей части.
Водитель обязан их соблюдать, ведь штраф — это самое малое, что он может получить за нарушение. Человеческие жизни намного дороже сэкономленных пары минут, не стоит об этом забывать.
Зона действия запрещающих знаков дорожного движения — до ближайшего обозначенного перекрестка, если они не установлены в сочетании с табличками. Последние удлиняют либо укорачивают ее. В случае установки под ним дополнительного информационного знака, зона действия соответствует значению, указанному на нем. Поэтому очень важно знать как «читается» та или иная табличка.
Стоит обратить внимание на дорожный знак «Остановка запрещена», зона действия которого распространяется исключительно на ту сторону дороги, где он установлен. Это же правило относится и к знаку «Стоянка запрещена».
Временные знаки
Основная цель данного типа устройств организации движения — это отмена постоянных, в связи с ремонтными или другими мероприятиями. Временные знаки внешне схожи с основными, но на желтом фоне. В ПДД имеется несколько средств организации движения, которые никогда не становятся постоянными. Несмотря на это, они также изображены на желтом фоне.
Зона действия временных дорожных знаков зависит от того, к какой группе они относятся:
- Предупреждающие — не имеют зоны действия.
- Приоритета — только один знак может быть временным «Преимущество встречного движения». Зона действия заканчивается за мостом, узким участком дороги и других местах, где затруднен одновременный двусторонний проезд.
- Запрещающие — несколько знаков являются исключительно временными. Остальные отменяются таким же устройством организации движения, но на желтом фоне и с четырьмя тонкими черными диагональными линиями справа налево.
- Информационно-указательные — группа имеет несколько временных знаков, не имеющих аналогичных постоянных. Они либо рекомендуют направление объезда, либо изображают его схему.
- Сервиса — не бывают временными.
Новое спектроскопическое окно на конических пересечениях биомолекул
В PNAS, Keefer et al. предложить экспериментальный подход, который позволяет детально визуализировать динамику молекулы, когда она проходит через коническое пересечение (CI), то есть реальную точку пересечения между двумя электронными состояниями (1). Чтобы описать фотоиндуцированную динамику молекул, необходимо решить зависящее от времени уравнение Шредингера для сложной волновой функции, которая зависит от многих электронных и ядерных степеней свободы.Чтобы упростить задачу, обычно используют приближение Борна – Оппенгеймера, которое состоит из разделения электронных и ядерных координат в волновой функции. Это приближение, которое оправдывается гораздо более высокой скоростью электронов по отношению к ядрам, состоит из решения уравнения Шредингера для электронов в заданных фиксированных положениях ядер и последующего получения электронных энергий как функции этих фиксированных ядерных координат, т.е. так называемые поверхности потенциальной энергии (ППЭ), которые часто называют адиабатическим приближением.
Во многих молекулах, однако, есть области ландшафта потенциальной энергии, такие как КИ, где электронные и ядерные степени свободы сильно перемешиваются, и приближение Борна – Оппенгеймера (адиабатическое) не работает. КИ являются повсеместным явлением в фотофизике и фотохимии молекул и могут рассматриваться как «дверные проемы», через которые фотовозбужденный волновой пакет (WP) эффективно направляется в электронное состояние с более низкой энергией (2, 3), что обеспечивает эффективную безызлучательную релаксацию ( также называется внутренним преобразованием).КИ — это топологии ППЭ, для которых два или более электронных состояния становятся изоэнергетическими, образуя многомерный «шов» (рис. 1). В зависимости от топографии вокруг шва КИ можно классифицировать как «наклонные» или «остроконечные». В пиковом CI (рис. 1, слева, ) WP направляется к стыку пересечения независимо от начального направления подхода, что приводит к более эффективному преобразованию и запуску фотохимии. С другой стороны, в наклонной CI (рис. 1, справа ) WP подводится к шву менее эффективно, поскольку WP приходится подниматься в гору и имеет возможность пропустить его, что часто приводит к более медленному распаду. которые не связаны с фотохимическими процессами.
Рис. 1.Простое одномерное схематическое изображение остроконечного ( слева, ) и наклонного ( справа, ) КИ.
КИ играют двойную роль во взаимодействии биомолекул со светом: либо для обеспечения эффективного преобразования реагента в состояние продукта в фотохимической реакции, либо для обеспечения эффективного рассеивания избыточной электронной энергии, предотвращая таким образом потенциально опасную фотохимическую реакцию. Ярким примером первого случая являются белки опсина, в которых фотовозбужденный хромофор сетчатки использует CI для обеспечения сверхбыстрой фотоизомеризации (все- транс до 13- цис в опсинах типа I и 11- цис для всех транс в типе II или визуальных опсинах) к фотопродукту основного состояния со спектрально красным смещением (4).Важным примером второго случая являются азотистые основания, строительные блоки ДНК, для которых КИ используются для ускорения рассеивания энергии возбужденного состояния, предотвращая фотореакции, которые могут повредить генетический код (5).
Учитывая чрезвычайную скорость процессов, ведущих к КИ, сверхбыстрая оптическая спектроскопия является выборочным инструментом для их наблюдения. Однако прямая визуализация WP, проходящего через CI, является сложной задачей, поскольку запрещенная зона по энергии между взаимодействующими уровнями изменяется очень быстро за короткое время, что требует сочетания высокого временного и спектрального разрешения.Новаторский эксперимент в этом направлении был проведен Полли и др., Которые использовали широко настраиваемые импульсы видимого / ближнего инфракрасного диапазона длительностью ~ 10 фс для отслеживания в реальном времени изомеризации сетчатки в родопсине (6). Спектроскопия нестационарного поглощения позволила проследить быстрое сокращение энергетической щели по мере того, как WP движется в направлении CI на ППЭ реагента в возбужденном состоянии, и последующее расширение щели, когда WP покидает КИ и эволюционирует на ППЭ основного состояния. фотопродукции. Однако сам момент прохождения через КИ оставался недоступным для этих экспериментов, так как для этого потребовалось бы очень длинноволновое зондирование перехода с нулевой силой осциллятора.В последнее время значительное новое понимание природы КИ было предоставлено разработкой новых сверхбыстрых зондов, таких как источники сверхбыстрого мягкого рентгеновского излучения для конкретных элементов (7, 8) или сверхбыстрой дифракции электронов (9, 10).
Мукамель и его коллеги (11) представили новый спектроскопический метод, который они назвали Transient Redistribution of Ultrafast Electronic Coherences in Attosecond Raman Signals (TRUECARS), который позволяет напрямую контролировать прохождение WP через CI. TRUECARS имеет некоторое сходство с когерентным антистоксовым комбинационным рассеянием (CARS) (12), но расширяет его от колебательной когерентности к электронной.В КАРС два оптических импульса, накачка на частоте ω pu и стоксова частота ω S , генерируют колебательную когерентность на частоте Ω = ω pu — ω S , которая считывается при дальнейшем взаимодействии с зондирующий импульс на частоте ω pr (часто выбирают ω pr = ω pu ) для генерации антистоксова сигнала на ω aS = ω pr + Ω. Во временной области или импульсном CARS зонд представляет собой ультракороткий импульс, временная задержка которого по отношению к импульсам накачки / Стокса варьируется, так что сигнал CARS колеблется как функция задержки с периодом (с) возбужденной колебательной когерентности. (s) (13).
TRUECARS нацелен на исследование электронной когерентности между двумя состояниями, участвующими в CI; для этого используется гибридная последовательность импульсов, состоящая из видимого актиничного импульса (накачки), за которым следуют два рентгеновских импульса с синхронизацией по фазе, широкополосный ( E 0 , с аттосекундной длительностью) и узкополосный. ( E 1 , с длительностью несколько фемтосекунд). Импульс накачки переводит молекулу в электронное возбужденное состояние, создавая ядерную WP в области Франка-Кондона, которая начинает развиваться на PES в возбужденном состоянии по направлению к CI, вблизи которого (т.е.е., где приближение Борна – Оппенгеймера начинает разрушаться) электронная когерентность между взаимодействующими электронными состояниями создается неадиабатической связью. Эта когерентность затем проверяется импульсами рентгеновского излучения, выбранными так, чтобы не резонансными с любым электронным переходом в молекуле, с помощью процесса стимулированного комбинационного рассеяния, что приводит к усилению / потере для различных спектральных компонентов широкополосного частотно-дисперсионного аттосекундного сигнала E 0 импульс. Таким образом, TRUECARS наблюдает электронные когерентности во временной области, аналогично колебательным когерентностям, измеренным в CARS.Важно отметить, что в TRUECARS, в отличие от аттосекундной нестационарной спектроскопии поглощения (7, 8), зондирующие импульсы не поглощаются молекулой, а просто происходит перераспределение энергии широкополосного импульса между его различными спектральными составляющими, согласно электронно-стимулированному рамановскому процессу усиления / потери. Использование рентгеновских зондирующих импульсов оправдано одновременными требованиями широкой полосы пропускания (несколько электрон-вольт для импульса E 0 ) и высокого временного разрешения (несколько фемтосекунд для E 1 импульс), что не может быть удовлетворено видимыми импульсами.
В оригинальной статье TRUECARS этот метод применен к минимальной «игрушечной» модели, состоящей из двух электронных состояний, связанных с двумя колебательными степенями свободы. В своей статье PNAS Кифер и др. применить TRUECARS к газовой фазе урацила, используя реалистичный ab initio молекулярный гамильтониан (1). Урацил представляет собой пиримидиновое азотистое основание, обнаруженное в РНК, которое заменяет тимин в ДНК, отличающееся от него отсутствием метильной группы. Как и все азотистые основания, урацил демонстрирует сильную полосу поглощения в ультрафиолете (УФ) с максимумом около 4.75 эВ, в сторону синглетного возбужденного состояния ( 1 ππ *). Ниже этого состояния находится другое возбужденное состояние, состояние nπ * 1 , которое является оптически темным. По этой причине яркое возбужденное состояние называется S 2 , а темное состояние — S 1 . После фотовозбуждения состояния S 2 WP очень быстро, в течение 100 фс, достигает CI с состоянием S 1 , из которого, в свою очередь, быстро распадается до основного состояния S 0 через другой CI (14 ).Это чрезвычайно быстрое безызлучательное рассеяние электронной энергии через КИ является общим для всех азотистых оснований и имеет большое биохимическое значение. Избыточная электронная энергия, депонированная в ДНК в результате поглощения УФ-излучения, может фактически запускать серию фотохимических реакций, приводящих к изменению структуры последовательности оснований (15). Одним из ярких примеров является ковалентное связывание (димеризация) двух соседних тиминов, приводящее к образованию димера циклобутана, который связан с канцерогенезом.Однако чрезвычайно быстрая дезактивация азотистых оснований в возбужденном состоянии через КИ сильно снижает эффективность таких неблагоприятных фотохимических реакций, поскольку не дает им достаточно времени, чтобы произойти, и, таким образом, действует как мощный встроенный механизм фотозащиты для ДНК.
В своем исследовании Keefer et al. (1) сконцентрироваться на первом CI между S 2 и S 1 состоянием урацила. Запустив ядерную БП на S 2 с помощью УФ-актиничного импульса длительностью ~ 30 фс, они наблюдают почти баллистическое движение к КИ с S 1 , которое достигается в пределах ~ 100 фс.На этом этапе моделирования включается гибридный широкополосный / узкополосный рентгеновский зондирующий импульс, настроенный на нерезонансную энергию фотонов 354 эВ, которая является промежуточной между углеродом (∼291 эВ) и азотом (∼405 эВ) K края. Сигнал TRUECARS для урацила имеет несколько ярких особенностей. Прежде всего, когда WP достигает CI, создается вибронная когерентность, которая живет в течение сотен фемтосекунд. Это удивительное наблюдение, учитывая быстрый характер пересечения CI, которое можно рационализировать, учитывая пространственно делокализованный характер WP на S 2 PES: различные части WP достигают CI в разное время, таким образом позволяя когерентности сохраняться в течение нескольких сотен фемтосекунд.Дальнейшее понимание физики процесса CI дает спектрограмма Вигнера сигнала TRUECARS, которая выявляет участвующие вибронные состояния. В частности, анализ подчеркивает разницу между классическим описанием неадиабатического процесса, где энергетическое расщепление между ППЭ четко определено и исчезает в КИ, и квантовым описанием, для которого существует распределение энергетических расщеплений в соответствии с частоты WP, которые необходимо усреднить, чтобы получить эффективное временное расщепление.
Подход TRUECARS, проиллюстрированный здесь для важной биомолекулы урацила, можно обобщить на широкий класс фотохимических и фотофизических проблем. Его экспериментальная реализация потребует комбинации актиничных импульсов видимого / УФ-диапазона (которые легко получить с помощью современных фемтосекундных лазерных технологий) с фемтосекундными и аттосекундными зондирующими рентгеновскими импульсами. В настоящее время существует два основных подхода к генерации (суб) фемтосекундных рентгеновских импульсов: генерация высоких гармоник (ГВГ) из газов и рентгеновские лазеры на свободных электронах (XFEL).HHG доказала способность генерировать аттосекундные рентгеновские импульсы в настольной установке (16) при энергиях вплоть до водяного окна (от 300 до 500 эВ), хотя в настоящее время с ограниченной энергией импульсов. С другой стороны, XFEL, будучи крупномасштабными установками, позволяют генерировать рентгеновские импульсы с гораздо более высокими энергиями и гораздо более широкой перестраиваемой частотой, а недавно доказали способность генерировать аттосекундные импульсы (17, 18). Таким образом, и HHG, и XFEL обеспечивают параметры импульса рентгеновского излучения, необходимые для данного метода.Однако при разработке эксперимента TRUECARS необходимо сделать важное соображение: сигнал имеет фазовый коэффициент ei (φ1 − φ0), где φ i — фазы рентгеновских импульсов, так что он усреднение будет равно нулю, если не будет стабилизирована разность фаз рентгеновских импульсов. Фазовая синхронизация между двумя импульсами рентгеновского зонда является важным техническим требованием, которое нелегко удовлетворить. Импульсы рентгеновского излучения с энергией 354 эВ, использованные Кифером и др. (1) имеют период колебаний несущей волны всего 11.7 как, так что потребуется управление задержкой на зептосекундном уровне для достижения управления фазой. Однако совсем недавно Витушек и др. Сделали важный шаг в этом направлении. (19), которые продемонстрировали генерацию пары импульсов с синхронизацией по фазе из затравочного ЛСЭ, хотя все еще при сравнительно низких энергиях фотонов (до 47,5 эВ).
В заключение подчеркнем, что в все еще развивающейся области сверхбыстрой оптической спектроскопии теория и эксперименты тесно взаимосвязаны (20).С одной стороны, теория необходима для интерпретации сложных и часто многомерных экспериментальных данных и для связи физических наблюдаемых с лежащей в основе молекулярной динамикой. С другой стороны, как прекрасно показали Keefer et al. (1) теория может предложить экспериментальные подходы, которые предлагают новое понимание ключевых молекулярных процессов, тем самым мотивируя непрерывные технические разработки в области генерации ультракоротких импульсов и направляя будущие эксперименты.
Сноски
Автор: Г.К. и М.Г. написал газету.
Авторы заявляют об отсутствии конкурирующей заинтересованности.
См. Сопутствующую статью «Визуализация переходов конических пересечений с помощью карт вибронной когерентности, генерируемых стимулированными сверхбыстрыми рентгеновскими рамановскими сигналами», 10.1073 / pnas.2015988117.
Сделать это актуальным: помочь студентам соединить свои исследования с миром сегодня
Еще один способ помочь наладить интересные и неожиданные связи — просто поискать и посмотреть, что появится.
Студенты могут выполнить этот шаг после мозгового штурма или самостоятельно — и они должны знать, что мы сами делаем это ежедневно в Learning Network.
Times публикует сотни статей со всего мира каждый день, поэтому, например, пока мы не искали «Франкенштейн», мы пропустили эту обучающую статью, сравнивающую монстра Мэри Шелли с Facebook:
В среду, в ответ на Отчет ProPublica о том, что Facebook позволяет рекламодателям нацеливать пользователей оскорбительными терминами, такими как «ненавистник евреев», Шерил Сандберг, главный операционный директор компании, извинилась и пообещала, что компания скорректирует свои инструменты покупки рекламы, чтобы предотвратить подобные проблемы в будущем.
Когда я читал ее заявление, мой взгляд задержался на одной строке, в частности:
«Мы никогда не предполагали и не ожидали, что эта функция будет использоваться таким образом — и это на нас», — написала г-жа Сандберг.
Это было откровенное признание, которое напомнило мне момент из «Франкенштейна» Мэри Шелли, после того, как ученый Виктор Франкенштейн понял, что его сколоченное существо сошло с ума.
«Я был виновником непреодолимого зла, — говорит он, — и жил в ежедневном страхе, чтобы созданное мной чудовище не совершило новое зло.
Если бы я был руководителем Facebook, я бы в эти дни мог испытывать франкенштейновское чувство беспокойства.
Пригласите своих учеников выполнить поиск по названиям, авторам, ключевым словам, концепциям, цитатам, событиям, темам или настройкам. Если вы участвуете в нашем конкурсе для студентов, вы можете использовать функцию диапазона дат слева, чтобы сузить поиск до «За последние 12 месяцев». В противном случае вы можете увидеть, что The Times публикует по этой теме с 1851 года.
Например, студенты могут:
• Искать автора, поскольку все основные авторы имеют свои собственные страницы тем в Times.Например, вот Шерман Алекси, а вот Маргарет Этвуд.
• Ищите заголовки. Вот все статьи, в которых упоминается «Юлий Цезарь», и все статьи, в которых упоминается Геттисбергское обращение за последние 12 месяцев.
• Найдите понятие или фразу. Вот поиск в Times по «американской мечте» за последние 12 месяцев. Щелкните вокруг, и вы увидите, что там есть статьи об альбоме LCD Soundsystem, в котором эта фраза используется в качестве названия, а также отрывок из Upshot о том, как сегодня выглядит американская мечта.
• Найдите жанр, например «графический роман», или открытие, например «ДНК».
• Возьмите тему. Вот что вы увидите, если поискать в «Таймс» «гендерные роли» за последние 12 месяцев. Как такие романы, как «Алая буква», «Говори» и «Рассказ служанки» могут иметь отношение к нашему моменту #MeToo?
Выявление переключения электронного состояния на конических пересечениях в алкилйодидах с помощью сверхбыстрой спектроскопии переходного поглощения XUV
Яркони Д. Р. Конические пересечения: новое общепринятое мнение. J. Phys. Chem. А 105 , 6277–6293 (2001).
CAS Google Scholar
Домке В. и Яркони Д. Р. Роль конических пересечений в молекулярной спектроскопии и фотоиндуцированной химической динамике. Annu. Rev. Phys. Chem. 63 , 325–352 (2012).
ADS CAS PubMed Google Scholar
Лепин, Ф., Иванов, М. Ю. и Враккинг, М. Дж. Дж. Аттосекундная молекулярная динамика: факт или вымысел? Nat. Фотоника 8 , 195–204 (2014).
ADS Google Scholar
Шурман М. С. и Столов А. Динамика на конических пересечениях. Annu. Rev. Phys. Chem. 69 , 427–450 (2018).
ADS CAS PubMed Google Scholar
Schultz, T. et al. Эффективная дезактивация модельной пары оснований через перенос водорода в возбужденном состоянии. Наука 306 , 1765–1768 (2004).
ADS CAS PubMed Google Scholar
Миддлтон, К. Т. и др. Динамика возбужденного состояния ДНК: от простых оснований до двойной спирали. Annu. Rev. Phys. Chem. 60 , 217–239 (2009).
ADS CAS PubMed Google Scholar
Шенлейн Р., Петеану Л., Мэтис Р. и Шанк К. Первый шаг в видении: фемтосекундная изомеризация родопсина. Наука 254 , 412–415 (1991).
ADS CAS PubMed Google Scholar
Левин Б. Г. и Мартинес Т. Дж. Изомеризация через конические пересечения. Annu. Rev. Phys. Chem. 58 , 613–634 (2007).
ADS CAS PubMed Google Scholar
Polli, D. et al. Динамика конического пересечения первичной фотоизомеризации в зрении. Природа 467 , 440–443 (2010).
ADS CAS PubMed Google Scholar
Attar, A. R. et al. Фемтосекундная рентгеновская спектроскопия электроциклической реакции раскрытия кольца. Наука 356 , 54–59 (2017).
ADS CAS PubMed Google Scholar
Бхаттахерджи, А., Пеммараджу, К. Д., Шнорр, К., Аттар, А. Р. и Леоне, С. Р. Сверхбыстрое межсистемное пересечение в ацетилацетоне посредством переходного поглощения фемтосекундного рентгеновского излучения на углеродном K-крае. J. Am. Chem. Soc. 139 , 16576–16583 (2017).
CAS PubMed Google Scholar
Wei, Z. et al. Выяснение происхождения многомодовых колебательных когерентностей многоатомных молекул, индуцированных интенсивными лазерными полями. Nat. Commun. 8 , 735 (2017).
ADS PubMed PubMed Central Google Scholar
Невилл, С. П., Черги, М., Столов, А., Шурман, М. С. Сверхбыстрая рентгеновская спектроскопия конических пересечений. Phys. Rev. Lett. 120 , 243001 (2018).
ADS PubMed Google Scholar
Янг, Л.и другие. Дорожная карта сверхбыстрого рентгеновского излучения в атомной и молекулярной физике. J. Phys. Летучая мышь. Мол. Опт. Phys. 51 , 032003 (2018).
ADS Google Scholar
Timmers, H. et al. Распутывание конических пересечений и когерентной молекулярной динамики в бромистом метиле с помощью аттосекундной нестационарной абсорбционной спектроскопии. Nat. Commun. 10 , 3133 (2019).
ADS PubMed PubMed Central Google Scholar
Кобаяши, Ю., Чанг, К. Ф., Зенг, Т., Ноймарк, Д. М., Леоне, С. Р. Прямое отображение динамики пересечения кривых в IBr с помощью аттосекундной нестационарной абсорбционной спектроскопии. Наука 365 , 79–83 (2019).
ADS CAS PubMed Google Scholar
Mulliken, R. S. Интенсивности в молекулярных электронных спектрах X. расчеты смешанных галогеновых, галогенидных, алкилгалогенидных и гидроксильных спектров. J. Chem. Phys. 8 , 382–395 (1940).
ADS CAS Google Scholar
Райли, С. Дж. И Уилсон, К. Р. Возбужденные фрагменты возбужденных молекул: распределение энергии при фотодиссоциации йодистых алкилов. Фарадей Обсудить. Chem. Soc. 53 , 132–146 (1972).
Google Scholar
Godwin, F. et al.Двухфотонное обнаружение индуцированной лазером ВУФ флуоресценции I * ( 2 P 1/2 ) и I ( 2 P 3/2 ) в результате фотодиссоциации алкилиодида при длине волны 248 нм. Chem. Phys. Lett. 135 , 163–169 (1987).
ADS CAS Google Scholar
Чандлер, Д. У. и Хьюстон, П. Л. Двумерное отображение продуктов фотодиссоциации в выбранном состоянии, обнаруженных с помощью многофотонной ионизации. J. Chem. Phys. 87 , 1445–1447 (1987).
ADS CAS Google Scholar
Филлипс, Д. Л., Лоуренс, Б. А. и Валентини, Дж. Дж. Влияние заместителей на динамику газофазной фотодиссоциации: резонансные спектры комбинационного рассеяния этилиодида, изопропилиодида и трет -бутилиодида. J. Phys. Chem. 95 , 9085–9091 (1991).
CAS Google Scholar
Го Х., Лао К. К., Шац Г. К. и Хаммерик А. Д. Квантовые неадиабатические эффекты при фотодиссоциации колебательно возбужденных CH 3 I. J. Chem. Phys. 94 , 65620–6568 (1991).
Google Scholar
Эппинк, А. Т. Дж. И Паркер, Д. Х. Распределение энергии после фотодиссоциации йодистого метила в полосе A : исследование скоростного картирования. J. Chem.Phys. 110 , 832–844 (1999).
ADS CAS Google Scholar
Эшфолд, М. Н. Р. и др. πσ * возбужденные состояния в молекулярной фотохимии. Phys. Chem. Chem. Phys. 12 , 1218–1238 (2010).
CAS PubMed Google Scholar
Corrales, M. E. et al. Влияние структурной динамики на сверхбыстрый разрыв химической связи в реакции фотодиссоциации. Phys. Chem. Chem. Phys. 16 , 8812–8818 (2014).
CAS PubMed Google Scholar
Геданкен А. Магнитный круговой дихроизм полосы A в CF 3 I, C 2 H 5 I и t -BuI. Chem. Phys. Lett. 137 , 462–466 (1987).
ADS CAS Google Scholar
Геданкен, А. и Роу, М. Д. Спектры магнитного кругового дихроизма метилгалогенидов: разрешение континуума n → σ *. Chem. Phys. Lett. 34 , 39–43 (1975).
ADS CAS Google Scholar
Uma, S. & Das, P.K. Получение I * ( 2 P 1/2 ) при ультрафиолетовой фотодиссоциации α -разветвленных алкилйодидов. Дж.Chem. Phys. 104 , 4470–4474 (1996).
ADS CAS Google Scholar
Ким, Ю.С., Канг, В.К., Ким, Д.-К. И Юнг, К.-Х. Фотодиссоциация трет -бутилиодида при 277 и 304 нм: свидетельство прямой и косвенной диссоциации при фотолизе алкилйодида в полосе А. J. Phys. Chem. А 101 , 7576–7581 (1997).
CAS Google Scholar
Xu, X. et al. Трансляционная спектроскопия фотофрагментов n -C 3 H 7 I и i -C 3 H 7 I около 280 и 304 нм. J. Phys. Chem. А 112 , 1857–1863 (2008).
CAS PubMed Google Scholar
Чжун Д. и Зевайл А. Х. Фемтосекундное зондирование реакций в реальном времени. 23 исследования временной, скоростной, угловой и динамики состояний от переходных состояний к конечным продуктам с помощью масс-спектрометрии с фемтосекундным разрешением. J. Phys. Chem. А 102 , 4031–4058 (1998).
CAS Google Scholar
Tang, Y., Lee, W.-B., Hu, Z., Zhang, B. & Lin, K.-C. Получение I, I * и C 2 H 5 в А-полосе фотодиссоциации иодистого этила в диапазоне длин волн от 245 до 283 нм с использованием обнаружения методом ионной визуализации. J. Chem. Phys. 126 , 064302 (2007).
ADS PubMed Google Scholar
Кавита, К. и Дас, П. К. Динамика производства I * ( 2 P 1/2 ) из фторированных алкилйодидов при 266, 280 и 305 нм. J. Chem. Phys. 112 , 8426–8431 (2000).
ADS CAS Google Scholar
Шуберт В. А., Редник М. и Пратт С. Т. Фотодиссоциация i -C 3 H 7 I в полосе A и разложение на основе анизотропии распределений поступательной энергии. J. Chem. Phys. 130 , 134306 (2009).
ADS PubMed Google Scholar
Аттар А. Р., Бхаттахерджи А. и Леоне С. Р. Прямое наблюдение области переходного состояния при фотодиссоциации CH 3 I с помощью фемтосекундной спектроскопии переходного поглощения в крайнем ультрафиолете. J. Phys. Chem. Lett. 6 , 5072–5077 (2015).
CAS PubMed Google Scholar
Корралес, М. Э., Гонсалес-Васкес, Дж., Де Нальда, Р. и Баньярес, Л. Визуализация кулоновского взрыва для визуализации конического пересечения. J. Phys. Chem. Lett. 10 , 138–143 (2019).
CAS PubMed Google Scholar
Wang, H., Odelius, M. и Prendergast, D. Комбинированный метод моделирования насос-зонд с несколькими эталонами с применением к XUV-сигнатурам сверхбыстрой фотодиссоциации йодистого метила. J. Chem. Phys. 151 , 124106 (2019).
ADS PubMed Google Scholar
Бхаттахерджи, А., Аттар, А. Р., Леоне, С. Р. Область переходного состояния в А-полосе фотодиссоциации аллилиодида — исследование переходного поглощения фемтосекундного экстремального ультрафиолета. J. Chem. Phys. 144 , 124311 (2016).
ADS PubMed Google Scholar
Drescher, L. et al. XUV нестационарная абсорбционная спектроскопия фотодиссоциации йодметана и йодбензола. J. Chem. Phys. 145 , 011101 (2016).
ADS CAS PubMed Google Scholar
Филлипс Д. Л., Майерс А. Б. и Валентини Дж. Дж. Исследование эффектов сольватации на динамику кратковременной фотодиссоциации алкилйодидов. J. Phys. Chem. 96 , 2039–2044 (1992).
CAS Google Scholar
Timmers, H. et al. Генерация высококонтрастных сигналов, близких к одному циклу, с компенсацией дисперсии третьего порядка. Опт. Lett. 42 , 811–814 (2017).
ADS PubMed Google Scholar
Петтини М., Маццони М. и Тоцци Г. П. Возбуждение внутренней 4d-оболочки нейтрального йода. Phys.Lett. А 82 , 168–170 (1981).
ADS Google Scholar
O’Sullivan, G., McGuinness, C., Costello, JT, Kennedy, ET & Weinmann, B. Тенденции фотоабсорбции 4 d -подоболочкой вдоль изоядерной последовательности йода: I, I + , а я 2+ . Phys. Ред. A 53 , 3211–3226 (1996).
ADS PubMed Google Scholar
Pertot, Y. et al. Рентгеновская абсорбционная спектроскопия с временным разрешением и источником высоких гармоник с водяным окном. Наука 355 , 264–267 (2017).
ADS CAS PubMed Google Scholar
Langer, B. et al. Угловое распределение резонансов автоионизации Ne: экспериментальное и теоретическое исследование. J. Phys. Летучая мышь. Мол. Опт. Phys. 30 , 593–607 (1997).
ADS CAS Google Scholar
Varillas, R. B. et al. Настраиваемые УФ-импульсы с уровнем микроджоулей длительностью менее 10 фс за счет генерации широкополосной суммарной частоты. Опт. Lett. 39 , 3849–3852 (2014).
ADS PubMed Google Scholar
Задача регулирования светофора на перекрестках: обзор | Обзор европейских исследований в области транспорта
Вебстер Ф. В. (1958). Настройки сигнала трафика (№ 39) Получено с https: // trid.trb.org/view/113579.
Google Scholar
Робертсон Д. И. (1969). TRANSYT: инструмент исследования сети трафика Получено с https://trid.trb.org/view/115048.
Google Scholar
Оллсоп Р. Э. (1972). Оценка пропускной способности сигнальной транспортной развязки. Транспортные исследования , 6 (3), 245–255.
Акчелик Р. (1981). Сигналы движения: анализ пропускной способности и времени Получено с https://trid.trb.org/view/173392.
Google Scholar
Феллендорф М. (1994). VISSIM: инструмент микроскопического моделирования для оценки сработавшего управления сигналом, включая приоритет шины. In 64 th Ежегодное собрание Института инженеров транспорта, 32 , (стр. 1–9).
Google Scholar
Мирчандани, П., и Хед, Л. (2001). Система управления сигналами дорожного движения в реальном времени: архитектура, алгоритмы и анализ. Транспортные исследования, часть C: Новые технологии , 9 (6), 415–432.
Артикул Google Scholar
Gallivan, S., & Heydecker, B. (1988). Оптимизация характеристик управления светофорами на единственном перекрестке. Транспортные исследования, часть B: методологические , 22 (5), 357–370.
Артикул Google Scholar
Ли С., Вонг С. К. и Варайя П. (2017). Групповое иерархическое адаптивное управление сигналами трафика. Часть I: Формулировка. Транспортные исследования, часть B: методологические , 105 , 1–18.
Артикул Google Scholar
Маккенни Д. и Уайт Т. (2013). Распределенное и адаптивное управление сигналом трафика в реалистичной симуляции трафика. Инженерные приложения искусственного интеллекта , 26 (1), 574–583.
Артикул Google Scholar
Сполл, Дж. К., и Чин, Д. К. (1997). Синхронизация сигнала с учетом трафика для общесистемного управления трафиком. Транспортные исследования, часть C: Новые технологии , 5 (3–4), 153–163.
Артикул Google Scholar
Урбаник, Т., Танака, А., Лознер, Б., Линдстрем, Э., Ли, К., Куэйл, С.,… Сункари, С. (2015). Руководство по синхронизации сигналов . Вашингтон, округ Колумбия: Транспортный исследовательский совет.
Книга Google Scholar
Koonce, P., & Rodegerdts, L. (2008). Руководство по синхронизации сигналов трафика (№ FHWA-HOP-08-024) . Федеральное управление шоссейных дорог Министерства транспорта США. Доступно по адресу https://rosap.ntl.bts.gov/view/dot/20661 [19 августа 2020 г.].
Lin, W. H., & Wang, C. (2004). Улучшенная формулировка LP со смешанным целым числом 0-1 для управления сигналом светофора. Транзакции IEEE в интеллектуальных транспортных системах , 5 (4), 238–245.
Артикул Google Scholar
Данн, М. К., и Поттс, Р. Б. (1964). Алгоритм управления трафиком. Исследование операций , 12 (6), 870–881.
MathSciNet МАТЕМАТИКА Статья Google Scholar
Шринивасан Д., Чой М. К. и Чеу Р. Л. (2006). Нейронные сети для управления сигналом трафика в реальном времени. Транзакции IEEE в интеллектуальных транспортных системах , 7 (3), 261–272.
Артикул Google Scholar
Газис Д. К. (1964). Оптимальное управление системой перенасыщенных перекрестков. Исследование операций , 12 (6), 815–831.
MATH Статья Google Scholar
Boillot, F., Midenet, S., & Pierrelée, J. C. (2006). Система управления городским движением в реальном времени CRONOS: Алгоритм и эксперименты. Транспортные исследования Часть C: Новые технологии , 14 (1), 18–38.
Артикул Google Scholar
Росс, Д. В., Сэндис, Р. К., и Шлафли, Дж. Л. (1971). Схема компьютерного управления для контроля критических перекрестков в городской сети. Транспортная наука , 5 (2), 141–160.
Артикул Google Scholar
Yu, X., & Recker, W. W. (2006). Стохастическая адаптивная модель управления системами светофора. Транспортные исследования Часть C: Новые технологии , 14 (4), 263–282.
Артикул Google Scholar
Данс, Г. К., и Газис, Д. К. (1976). Оптимальное управление перенасыщенными транспортными сетями с промежуточным хранением. Транспортная наука , 10 (1), 1–19.
MathSciNet Статья Google Scholar
Стеванович Дж., Стеванович А., Мартин П. Т. и Бауэр Т. (2008). Стохастическая оптимизация управления трафиком и настройки приоритета транзита в VISSIM. Транспортные исследования, часть C: Новые технологии , 16 (3), 332–349.
Артикул Google Scholar
Michalopoulos, P. G., & Stephanopoulos, G. (1977a). Перенасыщенные сигнальные системы с ограничениями по длине очереди — I: одиночное пересечение. Транспортные исследования , 11 (6), 413–421.
Артикул Google Scholar
Вильялобос, И. А., Позняк, А. С., и Тамайо, А. М. (2008). Проблема управления городским движением: подход теории игр. Сборник материалов IFAC , 41 (2), 7154–7159.
Артикул Google Scholar
Михалопулос П. Г. и Стефанопулос Г. (1977b). Перенасыщенные системы сигналов с ограничениями по длине очереди — II: Системы пересечений. Транспортные исследования , 11 (6), 423–428.
Артикул Google Scholar
Инь, Ю. (2008). Надежная оптимальная синхронизация сигнала светофора. Транспортные исследования, часть B: методологические , 42 (10), 911–924.
Артикул Google Scholar
Смит М. Дж. (1979). Управление движением и выбор маршрута; простой пример. Транспортные исследования, часть B: методологические , 13 (4), 289–294.
Артикул Google Scholar
Цай, К., Вонг, К. К., и Хейдекер, Б. Г. (2009). Адаптивное управление сигналами светофора с использованием приближенного динамического программирования. Транспортные исследования, часть C: Новые технологии , 17 (5), 456–474.
Артикул Google Scholar
Improta, G., & Cantarella, G.E. (1984). Проектирование системы управления индивидуальной сигнальной развязкой. Транспортные исследования, часть B: методологические , 18 (2), 147–167.
MathSciNet Статья Google Scholar
Экейла В., Сайед Т. и Эсавей М. Э. (2009). Разработка стратегии приоритета динамического транзитного сигнала. Отчет об исследованиях в области транспорта , 2111 (1), 1–9.
Артикул Google Scholar
Арел И., Лю К., Урбаник Т. и Колс А. Г. (2010). Многоагентная система на основе обучения с подкреплением для управления сигналами сетевого трафика. Интеллектуальные транспортные системы ИЭПП , 4 (2), 128–135.
Артикул Google Scholar
Гартнер Н. Х., Ассман С. Ф., Ласага Ф. и Хоу Д. Л. (1991). Многополосный подход к оптимизации сигналов уличного движения. Транспортные исследования, часть B: методологические , 25 (1), 55–74.
Артикул Google Scholar
Haddad, J., De Schutter, B., Mahalel, D., Ioslovich, I., & Gutman, P.О. (2010). Оптимальное установившееся управление изолированными транспортными развязками. Транзакции IEEE в автоматическом управлении , 55 (11), 2612–2617.
MathSciNet МАТЕМАТИКА Статья Google Scholar
Dell’Olmo, P., & Mirchandani, P. (1995). REALBAND: подход к координации потоков трафика в сетях в реальном времени. Отчет об исследованиях в области транспорта , 1494 , 106–116.
Google Scholar
Баладжи П.Г., Герман Х. и Сринивасан Д. (2010). Управление сигналами городского движения с помощью агентов обучения с подкреплением. Интеллектуальные транспортные системы IET , 4 (3), 177–188.
Артикул Google Scholar
Вонг, С. К. (1996). Групповая оптимизация таймингов сигналов с использованием модели трафика TRANSYT. Транспортные исследования, часть B: методологические , 30 (3), 217–244.
Артикул Google Scholar
Прашант, Л. А., и Бхатнагар, С. (2010). Обучение с подкреплением с аппроксимацией функций для управления сигналом светофора. Транзакции IEEE в интеллектуальных транспортных системах , 12 (2), 412–421.
Google Scholar
Сен, С., & Хед, К. Л. (1997). Управляемая оптимизация фаз на пересечении. Транспортная наука , 31 (1), 5–17.
MATH Статья Google Scholar
Лю Ю. и Чанг Г. Л. (2011). Модель оптимизации артериального сигнала для перекрестков, испытывающих обратный поток из очереди и перекрытие полосы движения. Транспортные исследования, часть C: новые технологии , 19 (1), 130–144.
Артикул Google Scholar
Силкок, Дж. П. (1997). Проектирование сигнально-управляемых переходов для групповой работы. Транспортные исследования, часть A: политика и практика , 31 (2), 157–173.
Google Scholar
Адачер, Л. (2012). Подход глобальной оптимизации для решения проблемы синхронизации сигналов трафика. Процедуры — социальные и поведенческие науки , 54 , 1270–1277.
Артикул Google Scholar
Хе, К., Хед, К. Л., и Дин, Дж. (2012). PAMSCOD: управление многомодальным артериальным сигналом на взводе с онлайн-данными. Транспортные исследования Часть C: Новые технологии , 20 (1), 164–184.
Артикул Google Scholar
Де Шуттер Б. и Де Мур Б. (1998). Оптимальное управление светофором на одном перекрестке. Европейский журнал контроля , 4 (3), 260–276.
MATH Статья Google Scholar
Ло, Х. К. (1999). Новая формула управления светофором. Транспортные исследования, часть A: политика и практика , 33 (6), 433–448.
Google Scholar
Чжэн, X., & Recker, W. (2013). Адаптивный алгоритм управления дорожными сигналами. Транспортные исследования Часть C: Новые технологии , 30 , 93–115.
Артикул Google Scholar
Wong, S. C., & Yang, C. (1999). Итерационная схема оптимизации сигналов на основе групп для сетей с равновесием трафика. Журнал передовых транспортных средств , 33 (2), 201–217.
Артикул Google Scholar
Кристофа Э., Папамихаил И. и Скабардонис А. (2013). Оптимизация управления сигналами на основе персонального трафика. Транзакции IEEE в интеллектуальных транспортных системах , 14 (3), 1278–1289.
Артикул Google Scholar
Ли Дж. Х. и Ли-Кван Х. (1999). Распределенные и кооперативные нечеткие контроллеры для группы транспортных развязок. Транзакции IEEE по системам, человеку и кибернетике, часть C: приложения и обзоры , 29 (2), 263–271.
Артикул Google Scholar
Чжан, Л., Инь, Ю., и Чен, С. (2013). Надежная оптимизация синхронизации сигналов с учетом экологических требований. Транспортные исследования Часть C: Новые технологии , 29 , 55–71.
Артикул Google Scholar
Trabia, M. B., Kaseko, M. S., & Ande, M. (1999). Двухступенчатый контроллер нечеткой логики для светофоров. Транспортные исследования, часть C: Новые технологии , 7 (6), 353–367.
Артикул Google Scholar
Варайя, П. (2013). Контроль максимального давления в сети сигнальных перекрестков. Транспортные исследования, часть C: Новые технологии , 36 , 177–195.
MathSciNet Статья Google Scholar
Niittymäki, J., & Pursula, M. (2000). Управление сигналом с использованием нечеткой логики. Нечеткие множества и системы , 116 (1), 11–22.
Артикул Google Scholar
Ли, Ю., Ю, Л., Тао, С., и Чен, К. (2013). Многоцелевая оптимизация времени светофора для перенасыщенного перекрестка . В Математических задачах в технике, 2013 .
Google Scholar
Чанг Т. Х. и Лин Дж. Т. (2000). Оптимальная синхронизация сигнала для перенасыщенного перекрестка. Транспортные исследования, часть B: методологические , 34 (6), 471–491.
Артикул Google Scholar
Хе, К., Хед, К. Л., и Дин, Дж. (2014). Мультимодальное управление сигналом трафика с приоритетом, срабатыванием сигнала и согласованием. Транспортные исследования Часть C: Новые технологии , 46 , 65–82.
Артикул Google Scholar
Джин, Дж. И Ма, X. (2015). Адаптивное групповое управление сигналами с помощью обучения с подкреплением. Транспортные исследовательские процедуры , 10 , 207–216.
Артикул Google Scholar
Рооземонд Д. А. (2001). Использование интеллектуальных агентов для активного контроля городских перекрестков в режиме реального времени. Европейский журнал операционных исследований , 131 (2), 293–301.
MATH Статья Google Scholar
Фенг, Ю., Хед, К. Л., Хошмагам, С., и Заманипур, М. (2015). Адаптивное управление сигналами в реальном времени в среде подключенного автомобиля. Транспортные исследования, часть C: Новые технологии , 55 , 460–473.
Артикул Google Scholar
Ло, Х. К., Чанг, Э., и Чан, Ю. К. (2001). Динамический контроль сетевого трафика. Транспортные исследования, часть A: политика и практика , 35 (8), 721–744.
Google Scholar
Ле Т., Ковач П., Уолтон Н., Ву Х. Л., Эндрю Л. Л. и Хоогендорн С. С. (2015). Децентрализованный контроль сигналов для городских дорожных сетей. Транспортные исследования Часть C: Новые технологии , 58 , 431–450.
Артикул Google Scholar
Wong, S. C., Wong, W. T., Leung, C. M., & Tong, C.О. (2002). Групповая оптимизация модели трафика TRANSYT, зависящей от времени, для управления трафиком области. Транспортные исследования, часть B: методологические , 36 (4), 291–312.
Артикул Google Scholar
Ху Дж., Парк Б. Б. и Ли Ю. Дж. (2015). Приоритет координированного транзитного сигнала, поддерживающий транзитное движение с использованием технологии подключенных транспортных средств. Транспортные исследования, часть C: Новые технологии , 55 , 393–408.
Артикул Google Scholar
Де Шуттер Б. (2002). Оптимизация последовательностей переключения ациклических сигналов трафика с помощью расширенной постановки задачи линейной комплементарности. Европейский журнал операционных исследований , 139 (2), 400–415.
MATH Статья Google Scholar
Хан, К., Лю, Х., Гая, В. В., Фриез, Т.Л. и Яо Т. (2016). Надежный подход к оптимизации для динамического управления сигналом светофора с учетом эмиссии. Транспортные исследования Часть C: Новые технологии , 70 , 3–26.
Артикул Google Scholar
Дион Ф. и Хеллинга Б. (2002). Основанная на правилах система управления сигналами движения в реальном времени с приоритетом транзита: приложение к изолированному перекрестку. Транспортные исследования, часть B: методологические , 36 (4), 325–343.
Артикул Google Scholar
Кристофа, Э., Ампунтолас, К., и Скабардонис, А. (2016). Оптимизация сигналов уличного движения: индивидуальный подход. Транспортные исследования Часть C: Новые технологии , 66 , 27–47.
Артикул Google Scholar
Абдулхай Б., Прингл Р. и Каракулас Г. Дж. (2003). Обучение с подкреплением для истинного адаптивного управления сигналом светофора. Журнал транспортного машиностроения , 129 (3), 278–285.
Артикул Google Scholar
Чой, С., Парк, Б. Б., Ли, Дж., Ли, Х. и Сон, С. Х. (2016). Технико-экономическое обоснование реализации на местах алгоритма управления дорожным сигналом с учетом совокупного времени в пути (CTR). Журнал передового транспорта , 50 (8), 2226–2238.
Артикул Google Scholar
Чой, М. К., Сринивасан, Д., и Чеу, Р. Л. (2003). Кооперативная гибридная архитектура агентов для управления сигналами трафика в реальном времени. Транзакции IEEE о системах, человеке и кибернетике. Часть A: системы и человек. , 33 (5), 597–607.
Артикул Google Scholar
Портилья, К., Валенсия, Ф., Эспиноза, Дж., Нуньес, А., и Де Шуттер, Б. (2016). Прогностический контроль на основе моделей для езды на велосипеде на городских перекрестках. Транспортные исследования Часть C: Новые технологии , 70 , 27–41.
Артикул Google Scholar
Wong, C. K., & Wong, S. C. (2003). Оптимизация времени прохождения сигналов для изолированных переходов по полосам. Транспортные исследования, часть B: методологические , 37 (1), 63–84.
MathSciNet Статья Google Scholar
Чандан, К., Секо, А. М., и Сильва, А. Б. (2017). Управление сигналом светофора в режиме реального времени для изолированного перекрестка с использованием логики слежения за автомобилем в среде подключенного транспортного средства. Транспортная исследовательская процедура , 25 , 1610–1625.
Артикул Google Scholar
Чанг, Т. Х. и Сан, Г. Ю. (2004). Моделирование и оптимизация перенасыщенной сигнальной сети. Транспортные исследования, часть B: методологические , 38 (8), 687–707.
Артикул Google Scholar
Джин Дж. И Ма X. (2017). Групповое управление светофором с возможностью адаптивного обучения. Инженерные приложения искусственного интеллекта , 65 , 282–293.
Артикул Google Scholar
Ди Феббраро, А., Джильо, Д., & Сакко, Н. (2004). Структура управления городским движением на основе гибридных сетей Петри. Транзакции IEEE в интеллектуальных транспортных системах , 5 (4), 224–237.
Артикул Google Scholar
Аслани М., Месгари М. С. и Виринг М. (2017). Адаптивное управление сигналом трафика с помощью методов критика субъекта в реальной сети трафика с различными событиями нарушения трафика. Транспортные исследования, часть C: Новые технологии , 85 , 732–752.
Артикул Google Scholar
Мурат Ю.С., Гедизлиоглу Э. (2005). Модель управления многофазным сигналом с нечеткой логикой для изолированных переходов. Транспортные исследования Часть C: Новые технологии , 13 (1), 19–36.
Артикул Google Scholar
Ли, Л., Хуанг, В., и Ло, Х. К. (2018). Адаптивное координированное управление трафиком для стохастического спроса. Транспортные исследования Часть C: Новые технологии , 88 , 31–51.
Артикул Google Scholar
Bazzan, A. L. (2005). Распределенный подход для координации агентов сигналов светофора. Автономные агенты и мультиагентные системы , 10 (2), 131–164.
Артикул Google Scholar
Ван, Ф., Тан, К., Ли, К., Лю, З., и Чжу, Л. (2019). Модель оптимизации синхронизации сигналов на основе групп, учитывающая безопасность сигнальных перекрестков со смешанными транспортными потоками. Журнал передовых перевозок , 2019 . https://doi.org/10.1155/2019/2747569.
Солтер Р. Дж. И Шахи Дж. (1979). Прогнозирование эффектов схем приоритета шины с использованием методов компьютерного моделирования. Отчет об исследованиях в области транспорта , 718 , 1–5.
Google Scholar
Луянда, Ф., Геттман, Д., Хед, Л., Шелби, С., Баллок, Д., и Мирчандани, П.(2003). Алгоритмическая архитектура ACS-lite: применение технологии адаптивной системы управления к системам управления дорожными сигналами с обратной связью. Отчет об исследованиях в области транспорта , 1856 (1), 175–184.
Артикул Google Scholar
Sims, A. G., & Dobinson, K. W. (1980). Философия и преимущества Сиднейской системы адаптивного трафика (SCAT). Транзакции IEEE по автомобильной технике , 29 (2), 130–137.
Артикул Google Scholar
Бинг Б. и Картер А. (1995). SCOOT: лучшая в мире адаптивная система управления ДВИЖЕНИЕМ. В Traffic Tecnology International’95 .
Google Scholar
Гартнер, Н. Х. (1983). OPAC: стратегия управления сигналами светофора с учетом спроса (№ 906) Получено с https://trid.trb.org/view/196609.
Google Scholar
Brilon, W., & Wietholt, T. (2013). Опыт адаптивного управления сигналом в Германии. Отчет об исследованиях в области транспорта , 2356 (1), 9–16.
Артикул Google Scholar
Мауро В. и Ди Таранто К. (1990). Утопия. Сборник материалов IFAC , 23 (2), 245–252.
Артикул Google Scholar
Ли, Дж. И Парк, Б. (2012). Разработка и оценка алгоритма совместного управления пересечением транспортных средств в среде подключенных транспортных средств. Транзакции IEEE в интеллектуальных транспортных системах , 13 (1), 81–90.
Артикул Google Scholar
Папагеоргиу, М., Дьякаки, К., Динопулу, В., Коциалос, А., и Ван, Ю. (2003). Обзор стратегий управления дорожным движением. Протоколы IEEE , 91 (12), 2043–2067.
Артикул Google Scholar
Лайтхилл, М. Дж., И Уизем, Г. Б. (1955). О кинематических волнах II. Теория транспортного потока на длинных людных дорогах. Труды Лондонского королевского общества. Серия A: Математические и физические науки , 229 (1178), 317–345.
MathSciNet МАТЕМАТИКА Google Scholar
Richards, P.I. (1956). Ударные волны на шоссе. Исследование операций , 4 (1), 42–51.
MathSciNet МАТЕМАТИКА Статья Google Scholar
Даганзо, К. Ф. (1994). Модель передачи ячеек: динамическое представление дорожного движения в соответствии с гидродинамической теорией. Транспортные исследования, часть B: методологические , 28 (4), 269–287.
Артикул Google Scholar
Фой, М. Д., Бенекохал, Р. Ф., и Голдберг, Д. Э. (1992). Определение времени сигнала с использованием генетических алгоритмов. Отчет об исследованиях в области транспорта , 1365 , 108–115.
Google Scholar
Парк Б., Мессер К. Дж. И Урбаник Т. (2000). Усовершенствованный генетический алгоритм для оптимизации времени сигнала перенасыщенных перекрестков. Отчет об исследованиях в области транспорта , 1727 (1), 32–41.
Артикул Google Scholar
Уоллес, К. Э., Кураж, К. Г., Хади, М. А., и Ган, А. С. (1988). TRANSYT-7F руководство пользователя . Гейнсвилл: Университет Флориды.
Google Scholar
Робертсон Д. И. и Бретертон Р. Д. (1991). Оптимизация сетей светофоров в реальном времени — метод SCOOT. Транзакции IEEE по автомобильным технологиям , 40 (1), 11–15.
Артикул Google Scholar
Лоури П. Р. (1982). Принципы, методология, алгоритм SCATS. В IEE Conf. О дорожных сигналах , (стр. 67–70) Публикация НВО 207.
Google Scholar
Генри Дж. Дж., Фарджес Дж. Л. и Туффал Дж. (1984). Алгоритм движения PRODYN в реальном времени. In Контроль в транспортных системах: Материалы 4-й конференции IFAC / IFIP / IFORS, Баден-Баден, Федеративная Республика Германия, 20–22 апреля 1983 г., , (стр.305–310). Пергамон.
Лист, Г. Ф., & Цетин, М. (2004). Моделирование управления светофорами с помощью сетей Петри. Транзакции IEEE в интеллектуальных транспортных системах , 5 (3), 177–187.
Артикул Google Scholar
Дотоли М. и Фанти М. П. (2006). Модель городской транспортной сети с помощью цветных временных сетей Петри. Инженерная практика управления , 14 (10), 1213–1229.
Артикул Google Scholar
Баззан А. Л. (2009). Возможности для многоагентных систем и многоагентного обучения с подкреплением в управлении движением. Автономные агенты и мультиагентные системы , 18 (3), 342.
Статья Google Scholar
Гуо, К., Ли, Л., и Бан, Х. Дж. (2019). Управление сигналами городского движения с подключенными и автоматизированными транспортными средствами: исследование. Транспортные исследования, часть C: новые технологии , 101 , 313–334.
Артикул Google Scholar
Гао П., Каас Х. В., Мор Д. и Ви Д. (2016). Автомобильная революция — перспектива к 2030 году: как конвергенция революционных технологических тенденций может трансформировать автомобильную промышленность . Advanced Industries , McKinsey & Company. http://hdl.voced.edu.au/10707/412253.
Донг, З., Ву, Ю., Пей, М., и Цзя, Ю. (2015). Классификация типов транспортных средств с использованием полууправляемой сверточной нейронной сети. Транзакции IEEE в интеллектуальных транспортных системах , 16 (4), 2247–2256.
Артикул Google Scholar
Лю К. и Мэттьюс Г. (2015). Быстрое обнаружение мультиклассовых транспортных средств на аэрофотоснимках. Письма по наукам о Земле и дистанционному зондированию IEEE , 12 (9), 1938–1942.
Артикул Google Scholar
Friesen, M. R., & McLeod, R. D. (2015). Bluetooth в интеллектуальных транспортных системах: обзор. Международный журнал исследований интеллектуальных транспортных систем , 13 (3), 143–153.
Артикул Google Scholar
Лан, К. Л., и Чанг, Г. Л. (2016). Оптимизация сигналов для артерий, испытывающих тяжелые смешанные потоки между скутерами и автомобилями. Транспортные исследования Часть C: Новые технологии , 72 , 182–201.
Артикул Google Scholar
Фурт, П. Г., Ван, Ю. Д., и Сантос, М. А. (2019). Многоступенчатые пешеходные переходы и двухэтапные велосипедные повороты: методы оценки задержки и синхронизации сигналов для ограничения задержки пешеходов и велосипедистов. Journal of Transportation Technologies , 9 (4), 489.
Статья Google Scholar
Фахардо, Д., Ау, Т. К., Уоллер, С. Т., Стоун, П., и Янг, Д. (2011). Автоматизированный контроль перекрестков: эффективность будущих инноваций по сравнению с текущим регулированием светофоров. Отчет об исследованиях в области транспорта , 2259 (1), 223–232.
Артикул Google Scholar
Се, X. Ф., Смит, С. Ф., Лу, Л., и Барлоу, Г. Дж. (2012). Контроль перекрестков по расписанию. Транспортные исследования, часть C: Новые технологии , 24 , 168–189.
Артикул Google Scholar
Пандит, К., Гхосал, Д., Чжан, Х. М., и Чуа, К. Н. (2013). Адаптивное управление сигналами трафика с помощью специальных автомобильных сетей. Транзакции IEEE по автомобильной технике , 62 (4), 1459–1471.
Артикул Google Scholar
Гулер С. И., Менендес М. и Мейер Л. (2014). Использование технологии подключенных транспортных средств для повышения эффективности перекрестков. Транспортные исследования Часть C: Новые технологии , 46 , 121–131.
Артикул Google Scholar
Чжу Ф. и Уккусури С. В. (2015). Формулировка линейного программирования для автономного контроля перекрестков в динамическом распределении трафика и подключенной среде транспортных средств. Транспортные исследования Часть C: Новые технологии , 55 , 363–378.
Артикул Google Scholar
Се, X. Ф., и Ван, З. Дж. (2018). SIV-DSS: Интеллектуальная система поддержки принятия решений в автомобиле для движения по сигнальным перекресткам с коммуникацией V2I. Транспортные исследования, часть C: Новые технологии , 90 , 181–197.
Артикул Google Scholar
Глава 6 — Пересечение / несогласованное время | Руководство по синхронизации сигналов — второе издание
Ниже приведен неисправленный машинно-читаемый текст этой главы, предназначенный для предоставления нашим собственным поисковым системам и внешним машинам богатого, репрезентативного текста каждой книги с возможностью поиска по главам.Поскольку это НЕПРАВИЛЬНЫЙ материал, пожалуйста, рассматривайте следующий текст как полезный, но недостаточный прокси для авторитетных страниц книги.
Глава 6. Межсекундное / несогласованное время ГЛАВА 6 ПЕРЕСЕЧЕНИЕ / НЕСООТВЕТСТВИЕ ВРЕМЕНИ СОДЕРЖАНИЕ 6.1 ОСНОВНЫЕ ПАРАМЕТРЫ СИГНАЛИЗАЦИИ ……………………………………… …………………………. 6-1 6.1.1 Желтое изменение ……………………………………… ……………………………………………………………………. 6-2 6.1.2 Красный зазор ……………………………………… ………………………………………….. ………………………… 6-4 6.1.3 Минимум зеленого ……………………………………… ………………………………………….. …………………….. 6-5 6.1.4 Максимальный зеленый цвет ……………………………………… ………………………………………….. ……………………. 6-8 6.1.5 Время прохождения (время продления или паузы)…………………………………………… ………… 6-10 6.1.6 Интервалы пешеходов ……………………………………… ………………………………………….. ……………. 6-16 6.1.7 Двойной вход ……………………………………… ………………………………………….. …………………………….. 6-20 6.1.8 Вызов и режимы памяти ……………………………………. ………………………………………….. … 6-20 6.2 КОНФИГУРАЦИИ ДЕТЕКТОРА ……………………………………….. ………………………………….. 6-23 6.2.1 Задержка ………………………………………. ………………………………………….. ……………………………………… 6-23 6.2.2 Время продления (время переноса или растяжения) ………………………………. ………………………. 6-25 6.2.3 Переключение детектора ……………………………………… ………………………………………………………….. 6-27 6.3 ПЛАНЫ ДНЯ ……………………………………. ………………………………………….. …………. 6-27 6.4 ССЫЛКИ ………………………………………… ………………………………………….. ………….. …….. 6-28 Руководство по синхронизации сигналов, второе издание
Глава 6. Межсекундное / несогласованное время СПИСОК УЧАСТНИКОВ Приложение 6-1. Руководство по основным параметрам синхронизации сигналов…………………………………………… …….. 6-1 Приложение 6-2 Продолжительность минимального интервала смены желтого цвета …………………………………. ……… 6-4 Приложение 6-3. Интервал очистки красного цвета ……………………………………. ………………………………………….. … 6-5 Приложение 6-4. Типичные значения минимального экологического баланса для удовлетворения ожиданий водителя ………… 6-6 Иллюстрация 6-5 Типичные значения начальных значений переменных для обнаружения снижения Очистка очереди (без обнаружения стоп-бара)………………………………………. 6-7 Приложение 6-6 Начальная переменная …………………………………….. ………………………………………….. ……………… 6-7 Приложение 6-7 Типичные значения минимальной длины фазы для измерения времени велосипеда …………….. 6-8 Приложение 6-8 Максимально зеленый …………………………………….. ………………………………………….. ………….. 6-9 Приложение 6-9 Типичные значения максимальной экологичности в зависимости от типа помещения……………….. 6-10 Приложение 6-10 Время прохождения …………………………………….. ………………………………………….. …………….. 6-11 Приложение 6-11 Взаимосвязь времени прохождения и скорости потока …………………………………. ………….. 6-12 Приложение 6-12 Типичные значения времени прохождения ………………………………….. ………………………….. 6-14 Приложение 6-13 Взаимосвязь между временем прохождения, минимальным промежутком и временем до Сокращение и время на сокращение…………………………………………… …………………… 6-15 Приложение 6-14 Особенности сокращения зазора и взаимосвязь расхода …………………………… 6-16 Приложение 6-15 Интервалы пешеходов …………………………………….. ………………………………………….. …. 6-17 Приложение 6-16 Типичные значения интервала пешеходной прогулки …………………………………. ………. 6-18 Иллюстрация 6-17 Пример обозначения функции расширенного нажатия кнопки………………… 6-18 Приложение 6-18 Расчетные значения времени пропуска пешеходов (на основе Скорость ходьбы 3,5 фута в секунду) …………………………………… ……………… 6-19 Приложение 6-19 Требования к интервалу между пешеходами в зависимости от скорости ходьбы ……………… 6-19 Приложение 6-20 Интервалы между пешеходами ……………………………………. ………………………………. 6-20 Приложение 6-21. Рекомендации по вызову и режиму памяти ………………………………………………. 6-22 Иллюстрация 6-22. Типичные настройки для повторных вызовов и режимов памяти при полностью подключенном состоянии. Активизированное пересечение ………………………………………… ……………………………………….. 6-22 Приложение 6-23 Таймер задержки …………………………………….. ………………………………………….. ……………….. 6-24 Приложение 6-24 Типичные значения задержки …………………………………… ………………………………………… 6-25 Приложение 6-25 Таймер продления …………………………………….. ………………………………………….. …………….. 6-26 Приложение 6-26. Типичные настройки для переключения извещателей в защищенном режиме. Разрешенные операции ………………………………………… ……………………………………….. 6-27 Руководство по синхронизации сигналов, второе издание
Глава 6. Межсекундная / несогласованная синхронизация 6-1 ГЛАВА 6. ПЕРЕСЕЧЕНИЕ / НЕСООТВЕТСТВИЕ ВРЕМЕНИ Глава 6 содержит руководство по основным параметрам синхронизации сигнала, используемым в несогласованные пересечения (т.д., перекрестки, идущие в «бесплатном» режиме). С использованием типичные значения времени, указанные в этой главе, практикующий должен уметь определять время планы стандартного восьмифазного перекрестка (без сбора обширных данных или проведение обширного анализа). Эти временные параметры также применяются, когда контроллер согласовывается с другими перекрестками, но с дополнительными параметрами, обсуждаемыми в Глава 7 также должна быть выбрана для согласованных операций. 6.1 ОСНОВНЫЕ ПАРАМЕТРЫ СИГНАЛИЗАЦИИ Для каждой фазы обычно программируются несколько основных временных параметров. сигнальный перекресток (т.е., связанный с таблицей фаз контроллера сигналов), в том числе • Желтое изменение, â € Красный зазор, • Минимум зеленый, • Максимум зеленого, • Время прохождения (время продления или паузы), • Пешеходные интервалы, • Двойная запись и • Напоминания и режимы памяти. В этой главе содержится описание этих параметров и их функций, а также какое-то направление, которое практикующий может использовать при выборе конкретных значений. Этот руководство было разработано с учетом восьмифазного пересечения с (1) полным срабатыванием для транспортных средств и пешеходов и (2) обнаружение режима присутствия (подробно обсуждается в Раздел 6.2). Приложение 6-1 представляет собой краткое изложение последствий, связанных с предоставлением слишком много или слишком мало времени для параметра, а также переменные, которые должны влиять на выбранное конечное значение параметра. Сроки Параметр Последствия для Слишком медленное время Последствия для Слишком много времени Зависит от Переменные, включая: S ec о п 6. 1. 1 желтый Изменять â – ¡Может создать дилемму зона (Тип I) â – ¡Может вызвать более высокое частота красного света Бег â – ¡Может способствовать неуважение со стороны знакомых водители â – ¡Восприятие водителя ответь мне â – ¡Замедление автомобиля показатель â – ¡Скорость приближения автомобиля â – ¡Степень подхода Se c на 6.1. 2 красный Оформление â – ¡Возможный конфликт после фаза начинается â – ¡Зря потратил меня на интерсекон â – ¡Ширина интерсекона â – ¡Длина автомобиля â – ¡Скорость приближения автомобиля Контроллер сигналов таблица фаз содержит сигнал мин значения параметров связана с конкретные фазы. «Интервал» — это термин это описывает мне когда сигнал индикация не изменение (например, прогулка, мигает не ходи, или зеленый интервал). Приложение 6-1: Основное. Время сигнала Руководство по параметрам Руководство по синхронизации сигналов, второе издание
Руководство по синхронизации сигналов, второе издание 6-2 Глава 6.Intersecon / несогласованное время Сроки Параметр Последствия для Слишком медленное время Последствия для Слишком много времени Зависит от Переменные, включая: Se c на 6. 1. 3 Минимум Зеленый â – ¡может нарушить водитель ожидания (ведущие к возможное увеличение задние аварии) â – ¡Может не соответствовать пешеходные нужды â – ¡Может не соответствовать велосипедные потребности â – ¡Зря потратил меня на интерсекон â – ¡Ожидаемая продолжительность водителя â – ¡Расположение детекторов â – ¡Количество в очереди автомобили â – ¡Пешеходные интервалы â – ¡Скорость велосипеда и ускорение Se c на 6.1. 4 Максимум Зеленый â – ¡Некоторые автомобили не могут служить, потому что фазовая емкость неадекватный спросу â – ¡Зря потратил меня на интерсекон (особенно если есть сломанный детекон) â – ¡Возможна очередь на движения с длинными задержки â – ¡Спрос на автомобили â – ¡Емкость Intersecon Se c на 6. 1. 5 Проход Время (Единица Расширение или Промежуток времени) â – ¡Зеленый может закончиться преждевременно прежде всего автомобили были служил â – ¡Задержки для других движения, вызванные продление фазы â – ¡Detecon design â – ¡Режим Detecon â – ¡Скорость приближения автомобиля Se c на 6.1. 6 Ходить â – ¡Может не соответствовать большие объемы пешеходы â – ¡Зря потратил меня на интерсекон â – ¡Пешеходные объемы â – ¡Push buƒon locaons â – ¡Пешеходный переход расстояние â – ¡Пешеходная ходьба скорость Мигает Не ходи (FDW) â – ¡Может не соответствовать мне нужно для пешеходов переходить улица â – ¡Зря потратил меня на интерсекон â – ¡Пешеходный переход расстояние â – ¡Пешеходная ходьба скорость 6.1.1 Желтое изменение Желтый интервал смены предупреждает пользователей, что скоро произойдет изменение правого Назначение полосы движения на перекрестке.6.1.1.1 Рекомендации по изменению желтого цвета в рабочей среде Транспортное средство штата относится к одной из двух широких категорий: разрешительное или ограничительный желтый закон, описанный ниже: • Разрешительный желтый закон: движение транспортных средств направлено на устойчивый круговой желтый или желтый цвет. тем самым сигнал желтой стрелки предупреждается о том, что соответствующее зеленое движение прекращается или что сразу же будет отображаться красная индикация после этого. Это правило взято из параграфа 11-202 Единообразного транспортного средства. Код (1). • Ограничительный желтый закон: эти менее распространенные законы требуют остановка, если это не небезопасно.Соответствующий интервал желтого цвета должен позволить автомобили для остановки.
Руководство по синхронизации сигналов, второе издание 6-2 Глава 6. Межсекундная / несогласованная синхронизация Сроки Параметр Последствия для Слишком медленное время Последствия для Слишком много времени Зависит от Переменные, включая: Se c на 6. 1. 3 Минимум Зеленый â – ¡может нарушить водитель ожидания (ведущие к возможное увеличение задние аварии) â – ¡Может не соответствовать пешеходные нужды â – ¡Может не соответствовать велосипедные потребности â – ¡Зря потратил меня на интерсекон â – ¡Ожидаемая продолжительность водителя â – ¡Расположение детекторов â – ¡Количество в очереди автомобили â – ¡Пешеходные интервалы â – ¡Скорость велосипеда и ускорение Se c на 6.1. 4 Максимум Зеленый â – ¡Некоторые автомобили не могут служить, потому что фазовая емкость неадекватный спросу â – ¡Зря потратил меня на интерсекон (особенно если есть сломанный детекон) â – ¡Возможна очередь на движения с длинными задержки â – ¡Спрос на автомобили â – ¡Емкость Intersecon Se c на 6. 1. 5 Проход Время (Единица Расширение или Промежуток времени) â – ¡Зеленый может закончиться преждевременно прежде всего автомобили были служил â – ¡Задержки для других движения, вызванные продление фазы â – ¡Detecon design â – ¡Режим Detecon â – ¡Скорость приближения автомобиля Se c на 6.1. 6 Ходить â – ¡Может не соответствовать большие объемы пешеходы â – ¡Зря потратил меня на интерсекон â – ¡Пешеходные объемы â – ¡Push buƒon locaons â – ¡Пешеходный переход расстояние â – ¡Пешеходная ходьба скорость Мигает Не ходи (FDW) â – ¡Может не соответствовать мне нужно для пешеходов переходить улица â – ¡Зря потратил меня на интерсекон â – ¡Пешеходный переход расстояние â – ¡Пешеходная ходьба скорость 6.1.1 Желтое изменение Желтый интервал смены предупреждает пользователей, что скоро произойдет изменение правого Назначение полосы движения на перекрестке.6.1.1.1 Рекомендации по изменению желтого цвета в рабочей среде Транспортное средство штата относится к одной из двух широких категорий: разрешительное или ограничительный желтый закон, описанный ниже: • Разрешительный желтый закон: движение транспортных средств направлено на устойчивый круговой желтый или желтый цвет. тем самым сигнал желтой стрелки предупреждается о том, что соответствующее зеленое движение прекращается или что сразу же будет отображаться красная индикация после этого. Это правило взято из параграфа 11-202 Единообразного транспортного средства. Код (1). • Ограничительный желтый закон: эти менее распространенные законы требуют остановка, если это не небезопасно.Соответствующий интервал желтого цвета должен позволить автомобили для остановки. Руководство по синхронизации сигналов, второе издание Глава 6. Межсекундный / несогласованный тайминг 6-3 Из-за различных интерпретаций интервала смены желтого цвета практикующие рекомендуется обращаться к местным и региональным законам для руководства при определении цель желтого времени изменения. 6.1.1.2 Типичные значения изменения желтого цвета Руководство по единообразным устройствам управления движением (2) требует, чтобы продолжительность Интервал замены желтого цвета должен быть определен с использованием инженерных практик.Это должно быть на основе индивидуальных условий пересечения (т. е. скорости приближения). Желтое изменение интервал должен длиться примерно от 3 до 6 секунд, при этом более длинные интервалы должны использоваться на подходы с большей скоростью. Институт инженеров транспорта (ITE) предлагает уравнение 6-1 для вычислений. желтый интервал замены (3). Уравнение рассчитывает время, необходимое водителю, чтобы примите решение сделать безопасную остановку или продолжить движение. Это минимальное время, чтобы устранить зону дилеммы (Тип I), которая существует, если желтый цвет слишком короткий.Зоны принятия решений (также известные как зоны дилеммы типа II или зоны нерешительности), которые связаны с конструкция обнаружения подробно обсуждается в главе 4. куда Y = интервал смены желтого цвета (секунды), t = время восприятия-реакции на появление желтой индикации (секунды), v = скорость приближения (миль в час [миль / ч]), a = скорость замедления в ответ на появление желтой индикации (футов на секунда в секунду), и g = уклон с положительным подъемом и отрицательным спуском (уклон в процентах / 100) (футы / футы).Хотя значения будут варьироваться в зависимости от населения пользователя и местных условий, восприятие: время реакции (t) 1,0 секунды и скорость замедления (a) 10 футов в секунду на вторые часто цитируются для использования в уравнении 6-1 (4, 5) и недавно были рекомендуется для использования в NCHRP 731 (6). Эти рекомендуемые значения отличаются от те, которые цитируются в политических документах по геометрическому проектированию автомагистралей, потому что они основаны на реакция водителя на желтый индикатор, что является ожидаемым состоянием. Они не на основе более длительного времени реакции, необходимого для неожиданного (или неожиданного) состояния.При применении уравнения 6-1 к сквозным фазам движения используется скорость обычно либо скорость 85-го процентиля, либо установленное нормативное ограничение скорости, в зависимости от политики агентства (7). При применении уравнения 6-1 к фазам левого поворота скорость может равняться скорости соседнего сквозного движения, но может быть и медленнее, так как водители, поворачивающие влево, по своей сути замедляют скорость до комфортной скорости поворота. На рисунке 6-2 показаны результаты минимального интервала замены желтого цвета на основе уравнения 6-1. и рекомендованные значения, рассмотренные выше.Эти значения для минимального желтого цвета: достаточно долго, чтобы предотвратить возникновение дилеммы, поэтому водители не будут «останавливаться» в зоне где они не могут ни войти на желтом, ни остановиться. Это минимальный требуемый желтый цвет. чтобы предотвратить въезд транспортного средства на красный цвет, когда на самом деле водитель, возможно, не имел достаточно времени, чтобы остановиться. Это очень желательно для водители в регионе, чтобы видеть последовательный применение желтое изменение интервал. Equaon 6-1
Руководство по синхронизации сигналов, второе издание 6-4 Глава 6.Intersecon / несогласованное время Значения интервала смены желтого цвета в Приложении 6-2 основаны на незначительных значениях. подход к классам. Их следует увеличивать на 0,1 секунды на каждый 1 процент понизить версию. Точно так же их следует уменьшать на 0,1 секунды на каждый 1 процент Обновить. Чтобы проиллюстрировать это, рассмотрим заход на посадку со скоростью 30 миль в час и 4- процент понижения рейтинга. Предполагаемый период изменения желтого цвета должен составлять 3,6 секунды (= 3,2 + (0,1 — 4)). Минимальная скорость приближения (миль / ч) к желтому цвету1 (секунды) 25 3.0 * 30 3,2 35 3,6 40 3,9 45 4,3 50 4,7 55 5,0 60 5,4 1 На основе незначительных уклонов подхода. Для обновлений и понижения требуются корректировки. * MUTCD (2) рекомендует минимум 3 секунды для желтого интервала смены. 6.1.2 Красный зазор Красный интервал просвета — это необязательный параметр синхронизации сигнала, который обеспечивает период в конце желтого интервала изменения, в течение которого фаза имеет красный сигнал отображается перед отображением зеленого цвета для следующей фазы. Цель этого интервала — дать время для транспортных средств, которые въехали на перекресток во время желтой смены интервал для достижения подходящего места до следующего этапа.Практикующим следует понимают, что особые условия, такие как тяжелые автомобили и переход на более раннюю версию, могут заслуживают особого внимания. 6.1.2.1 Соображения относительно рабочей среды для красного зазора Использование красного интервала зазора не является обязательным, и единого мнения относительно его использования нет. применение или продолжительность. Недавние исследования показывают, что использование красного зазора Интервал показывает некоторое уменьшение количества нарушений режима «красный свет». В этих исследованиях также значительно сократилось количество столкновений под прямым углом после применения красного клиренс.Однако другие исследования показывают, что это сокращение может быть только временный. Комплексное исследование долгосрочных эффектов для Министерства Миннесоты of Transportation (8) указали на краткосрочное снижение количества аварий. (примерно через год после внедрения), но долгосрочных сокращений не было наблюдается, что означает, что не может быть преимуществ безопасности, связанных с увеличением красные интервалы зазора. Недостатком использования красного интервала зазора является уменьшение доступное зеленое время для других фаз.На перекрестках, где наступает время для несовершеннолетних передвижения ограничены (например, при скоординированных операциях, которые описаны в Глава 7), дополнительное время для интервала красной очистки прибывает из оставшихся фаз. на перекрестке. В случаях, когда основные движения уже достигли или близки к насыщению, снижение пропускной способности, связанное с обеспечением красных интервалов зазора, должно быть учтены в оперативном анализе. Недавнее исследование, связанное с NCHRP 731 (6), подтвердило, что транспортные средства не выезжайте на перекресток до 1 секунды после начала зеленого и рекомендует красный Приложение 6-2 Duraon минимального желтого Изменить интервал Некоторые публикации неправильно ссылаться на красный интервал очистки как полностью красный интервал.Только красный зазор применяется к одиночному фаза.
Руководство по синхронизации сигналов, второе издание 6-4 Глава 6. Межсекундная / несогласованная синхронизация Значения интервала смены желтого цвета в Приложении 6-2 основаны на незначительных значениях. подход к классам. Их следует увеличивать на 0,1 секунды на каждый 1 процент понизить версию. Точно так же их следует уменьшать на 0,1 секунды на каждый 1 процент Обновить. Чтобы проиллюстрировать это, рассмотрим заход на посадку со скоростью 30 миль в час и 4- процент понижения рейтинга.Предполагаемый период изменения желтого цвета должен составлять 3,6 секунды (= 3,2 + (0,1 — 4)). Минимальная скорость приближения (миль / ч) к желтому цвету1 (секунды) 25 3,0 * 30 3,2 35 3,6 40 3,9 45 4,3 50 4,7 55 5,0 60 5,4 1 На основе незначительных уклонов подхода. Для обновлений и понижения требуются корректировки. * MUTCD (2) рекомендует минимум 3 секунды для желтого интервала смены. 6.1.2 Красный зазор Красный интервал просвета — это необязательный параметр синхронизации сигнала, который обеспечивает период в конце желтого интервала изменения, в течение которого фаза имеет красный сигнал отображается перед отображением зеленого цвета для следующей фазы.Цель этого интервала — дать время для транспортных средств, которые въехали на перекресток во время желтой смены интервал для достижения подходящего места до следующего этапа. Практикующим следует понимают, что особые условия, такие как тяжелые автомобили и переход на более раннюю версию, могут заслуживают особого внимания. 6.1.2.1 Соображения относительно рабочей среды для красного зазора Использование красного интервала зазора не является обязательным, и единого мнения относительно его использования нет. применение или продолжительность. Недавние исследования показывают, что использование красного зазора Интервал показывает некоторое уменьшение количества нарушений режима «красный свет».В этих исследованиях также значительно сократилось количество столкновений под прямым углом после применения красного клиренс. Однако другие исследования показывают, что это сокращение может быть только временный. Комплексное исследование долгосрочных эффектов для Министерства Миннесоты of Transportation (8) указали на краткосрочное снижение количества аварий. (примерно через год после внедрения), но долгосрочных сокращений не было наблюдается, что означает, что не может быть преимуществ безопасности, связанных с увеличением красные интервалы зазора.Недостатком использования красного интервала зазора является уменьшение доступное зеленое время для других фаз. На перекрестках, где наступает время для несовершеннолетних передвижения ограничены (например, при скоординированных операциях, которые описаны в Глава 7), дополнительное время для интервала красной очистки прибывает из оставшихся фаз. на перекрестке. В случаях, когда основные движения уже достигли или близки к насыщению, снижение пропускной способности, связанное с обеспечением красных интервалов зазора, должно быть учтены в оперативном анализе.Недавнее исследование, связанное с NCHRP 731 (6), подтвердило, что транспортные средства не выезжайте на перекресток до 1 секунды после начала зеленого и рекомендует красный Приложение 6-2 Duraon минимального желтого Изменить интервал Некоторые публикации неправильно ссылаться на красный интервал очистки как полностью красный интервал. Только красный зазор применяется к одиночному фаза. Руководство по синхронизации сигналов, второе издание Глава 6. Межсекундный / несогласованный тайминг 6-5 интервалы зазоров, как показано на рисунке 6-3.(Ширина перекрестка измеряется от стоп-бара до продолжения линии бордюра на перекрестке или внешнего края самая дальняя полоса для проезда через улицу.) Некоторые современные контроллеры могут быть настроены на установите красный зазор, когда обнаружено, что транспортное средство находится в нежелательной позиция в начале противоречивого зеленого цвета. Это приложение совместимо с MUTCD руководство, позволяющее удлинить красный интервал клиренса. Подход Скорость (Миль / ч) Красный зазор1 (секунды) Ширина интерсекона (футы) 30 50 70 90 110 25 0.4 0,9 1,5 2,0 2,5 30 0,1 0,6 1,0 1,5 2,0 35 0,0 0,4 0,8 1,1 1,5 40 0,0 0,2 0,5 0,9 1,2 45 0,0 0,1 0,4 0,7 1,0 50 0,0 0,0 0,2 0,5 0,8 55 0,0 0,0 0,1 0,4 0,6 60 0,0 0,0 0,0 0,2 0,5 1 Основываясь на недавнем исследовании, опубликованном в NCHRP 731 (6), расчетные значения красного зазора были уменьшены на 1 второй. 6.1.3 Минимум зеленого Минимальный параметр зеленого цвета представляет наименьшее количество времени, в течение которого зеленый индикация сигнала будет отображаться для фазы. Минимальный зеленый должен быть установлен, чтобы соответствовать ожидания водителя, но его продолжительность также может быть основана на соображениях очереди длина или время пешехода.Высокоскоростные сельские районы, особенно с высокими грузовиками объемы, могут выиграть от более длительного времени, чем на типичных городских перекрестках. Слишком длинный минимальный зеленый цвет может привести к увеличению задержки и чрезмерному очереди на перекрестке; слишком короткий может нарушить ожидания водителя или, в в некоторых случаях пешеходные нужды. (В этой главе обнаружение пешеходов и указатели предполагается присутствовать. Особенности расписания пешеходов подробно обсуждаются в Раздел 6.1.6.) 6.1.3.1 Условия эксплуатации для минимального зеленого Транспортные средства с более длительным временем запуска (например, велосипеды, грузовики и транзит) обычно требуется больше времени для очистки очередей в начале зеленого интервала. Более продолжительное минимальное время зеленых насаждений может быть целесообразным в местах с большим количеством эти типы транспортных средств, в зависимости от типа конструкции обнаружения. 6.1.3.2 Типичные значения минимального уровня зеленого, основанные на ожиданиях водителя Рекомендуемая продолжительность минимального зеленого света, необходимого для удовлетворения ожиданий водителя. варьируется среди практикующих.Некоторые используют минимум зеленого 15 секунд или больше; Другой практикующие используют всего 2 секунды. Если минимальный зеленый параметр установлен слишком низким и нарушает ожидания водителя, есть риск учащения наездов сзади. Ценности Перечисленные в Приложении 6-4 являются типичными для указанных комбинаций фазы и типа объекта. Экспонат 6-3 Красный Клиренс Интервал
Руководство по синхронизации сигналов, второе издание 6-6 Глава 6. Межсекундная / несогласованная синхронизация Тип фазы Тип объекта Минимум зеленый (секунды) Через Основная артерия (> 40 миль / ч) от 10 до 15 Основная артерия (â ¤ 40 миль в час) от 7 до 15 Малая артериальная от 4 до 10 Коллектор, местный или подъездная дорожка с 2 по 10 Ле ‡ Поверните любой от 2 до 5 6.1.3.3 Типичные значения минимального уровня зеленого на основе очистки очереди Помимо ожидаемой продолжительности работы водителя, продолжительность минимального зеленого света также может быть изменена. под влиянием расположения детекторов. Если определение стоп-бара отсутствует, минимальный зеленый интервал необходим для очистки автомобилей, стоящих в очереди между стоп-баром и ближайший детектор отступления. Если минимального зеленого цвета недостаточно для очистки транспортных средств, автомобиль может «застрять» между датчиком задержки и стоп-баром. Без остановки обнаружение полосы, контроллер не узнает об ожидающем автомобиле.Уравнение 6-2 (в сочетании с уравнением 6-3) можно использовать для оценки минимально необходимого зеленого чтобы выполнить очистку очереди. Уравнение 6-2 предполагает потерю времени запуска 3 секунды и что каждому последующему автомобилю требуется 2 секунды, чтобы покинуть перекресток: куда Gq = минимальная продолжительность зеленого для очистки очереди (секунды) и n = количество транспортных средств между стоп-баром и ближайшим датчиком движения на одной полосе движения. куда d = расстояние между стопорной планкой и нижним краем ближайшего детектор отступления (футы) и Lv = длина транспортного средства (футы), установленная на уровне 25 футов.Современные контроллеры могут регулировать количество зеленого времени, отдаваемого фазе, в зависимости от длина очереди (когда определение стоп-бара не используется) с использованием параметра, называемого «переменная» начальный ». Минимальный уровень зеленого, чтобы удовлетворить ожидания водителя (обсуждалось в предыдущем раздел) часто используется для определения нижнего предела для переменной начальной и максимальной значение определяется временем зеленого цвета, необходимым для очистки очереди (при условии, что оно больше чем минимальный зеленый, необходимый для ожидания водителя). Начальная переменная будет увеличивается постепенно в зависимости от количества срабатываний (т.е., количество пользователей обнаружен) в течение желтого и красного интервалов, пока не будет достигнут верхний предел, но будет никогда не быть меньше минимального зеленого. На Таблице 6-5 представлены некоторые типичные значения для минимальный зеленый цвет, максимальное начальное значение переменной и добавленные секунды за срабатывание, в то время как Иллюстрация 6-6 иллюстрирует эту концепцию. Обратите внимание, что зеленое время для очистки очереди (рассчитанный с использованием уравнения 6-2) отмечен в Таблице 6-5 как максимальное начальное значение переменной. Образец 6-4 Типичный Значения для минимума Зеленый для водителя Sasfy Ожидание Как описано в Глава 5, запуск потерял меня это я используется первыми машины в очереди на реагировать на зеленый индикаторы и ускоряться.Equaon 6-2 Equaon 6-3
Руководство по синхронизации сигналов, второе издание 6-6 Глава 6. Межсекундная / несогласованная синхронизация Тип фазы Тип объекта Минимум зеленый (секунды) Через Основная артерия (> 40 миль / ч) от 10 до 15 Основная артерия (â ¤ 40 миль в час) от 7 до 15 Малая артериальная от 4 до 10 Коллектор, местный или подъездная дорожка с 2 по 10 Ле ‡ Поверните любой от 2 до 5 6.1.3.3 Типичные значения минимального уровня зеленого на основе очистки очереди Помимо ожидаемой продолжительности работы водителя, продолжительность минимального зеленого света также может быть изменена. под влиянием расположения детекторов.Если определение стоп-бара отсутствует, минимальный зеленый интервал необходим для очистки автомобилей, стоящих в очереди между стоп-баром и ближайший детектор отступления. Если минимального зеленого цвета недостаточно для очистки транспортных средств, автомобиль может «застрять» между датчиком задержки и стоп-баром. Без остановки обнаружение полосы, контроллер не узнает об ожидающем автомобиле. Уравнение 6-2 (в сочетании с уравнением 6-3) можно использовать для оценки минимально необходимого зеленого чтобы выполнить очистку очереди.Уравнение 6-2 предполагает потерю времени запуска 3 секунды и что каждому последующему автомобилю требуется 2 секунды, чтобы покинуть перекресток: куда Gq = минимальная продолжительность зеленого для очистки очереди (секунды) и n = количество транспортных средств между стоп-баром и ближайшим датчиком движения на одной полосе движения. куда d = расстояние между стопорной планкой и нижним краем ближайшего детектор отступления (футы) и Lv = длина транспортного средства (футы), установленная на уровне 25 футов. Современные контроллеры могут регулировать количество зеленого времени, отдаваемого фазе, в зависимости от длина очереди (когда определение стоп-бара не используется) с использованием параметра, называемого «переменная» исходный.â € Минимальный зеленый цвет, чтобы удовлетворить ожидания водителя (обсуждалось в предыдущем раздел) часто используется для определения нижнего предела для переменной начальной и максимальной значение определяется временем зеленого цвета, необходимым для очистки очереди (при условии, что оно больше чем минимальный зеленый, необходимый для ожидания водителя). Начальная переменная будет увеличивается постепенно в зависимости от количества срабатываний (т. е. количества пользователей, которые обнаружен) в течение желтого и красного интервалов, пока не будет достигнут верхний предел, но будет никогда не быть меньше минимального зеленого.На Таблице 6-5 представлены некоторые типичные значения для минимальный зеленый цвет, максимальное начальное значение переменной и добавленные секунды за срабатывание, в то время как Иллюстрация 6-6 иллюстрирует эту концепцию. Обратите внимание, что зеленое время для очистки очереди (рассчитанный с использованием уравнения 6-2) отмечен в Таблице 6-5 как максимальное начальное значение переменной. Образец 6-4 Типичный Значения для минимума Зеленый для водителя Sasfy Ожидание Как описано в Глава 5, запуск потерял меня это я используется первыми машины в очереди на реагировать на зеленый индикаторы и ускоряться.Equaon 6-2 Equaon 6-3 Руководство по синхронизации сигналов, второе издание Глава 6. Межсекундный / несогласованный тайминг 6-7 Дистанция между Стоп-бар и Ближайшая неудача Детектор (ноги) Минимальный зеленый (Секунды) Максимальная переменная Начальный (секунды) Секунд добавлено за Actuaon1 275 10 25 2,0 350 10 31 2,0 425 10 37 2,0 500 10 43 2,0 1 секунда, добавленная на срабатывание, предполагает примерно 2-секундный интервал. 6.1.3.4 Типичные значения минимального зеленого на основе времени велосипеда На перекрестках со значительными объемами велосипедов и обнаружением стоп-бара для велосипедов, минимальное время зеленого (вместе с желтыми интервалами смены и красными интервалами зазора) должен вместить велосипед, пересекающий перекресток.Практикующий не как правило, велосипед необходимо размещать исключительно в минимальное время для зеленых насаждений. Вместо этого велосипеды должны быть размещены в пределах минимальной длины фазы (что включает минимальное время зеленого цвета, интервал замены желтого цвета и интервал разрешения красного цвета). Уравнение 6-4, предоставленное Министерством транспорта Калифорнии (Caltrans) Калифорнийское руководство по унифицированным устройствам управления трафиком (9), можно использовать для расчета минимальное количество времени, необходимое велосипеду для преодоления перекрестка.Образец 6-5 Типичный Переменная начальная синхронизация Ценности для отступления Очередь Detecon Зазор (без Stop Bar Detecon) Экспонат 6-6 Переменная Начальный
Руководство по синхронизации сигналов, второе издание 6-8 Глава 6. Межсекундная / несогласованная синхронизация куда Gmin = длина минимального интервала между зелеными сигналами (секунды), Y = длина желтого интервала смены (секунды), Rclear = длина интервала очистки красного (в секундах), и w = расстояние от ограничительной линии до дальней стороны последней полосы движения (футы).Предполагается, что скорость движения велосипеда составляет 10 миль в час (14,7 футов в секунду). уравнение, и эффективное время потери запуска, равное 6 секундам, используется для представления время, потраченное на то, чтобы среагировать на зеленую индикацию и затем разогнаться до полной скорости. Типичный значения минимальной длины фазы, используемой в велосипедной среде, приведены в Приложение 6-7. Расстояние перехода велосипеда (расстояние от предела Линия до дальней стороны последней конфликтной полосы) (футы) Минимальная длина фазы (секунды) 40 9,1 50 9.8 60 10,5 70 11,2 80 11,9 90 12,5 100 13,2 110 13,9 120 14,6 130 15,3 140 15,9 150 16,6 160 17,3 170 18,0 180 18,7 6.1.4 Максимальный зеленый Максимальный зеленый параметр представляет максимальное количество времени, в течение которого зеленая индикация сигнала может отображаться при наличии звонка на конфликтной фазе. Слишком длинный зеленый максимум может привести к потере времени на перекрестке, и движения, которые в результате испытывают длительные задержки, могут попасть в очередь. Если максимальное значение зеленого слишком короткое, тогда емкость фазы может быть недостаточной для спрос на трафик, и некоторые автомобили останутся необслуженными в конце зеленого интервала.Как показано на Приложении 6-8, таймер максимального количества зеленого начинает отсчет времени при наличии конфликтный звонок. Если есть спрос на текущую фазу и нет конфликтующих вызовов, максимальный зеленый таймер будет сброшен до максимального значения до тех пор, пока происходит встречный вызов. Максимум зеленого цвета используется для ограничения задержки любого движения на перекрестке и сохраняет длину цикла на желаемом максимальном уровне. Он также защищает от длинных зеленых раз из-за непрерывного спроса или неисправных детекторов.Нормальный режим отказа извещатель должен постоянно обращаться в службу поддержки, поэтому неисправный извещатель на фазе будет заставьте максимум зеленого цвета этой фазы включаться в каждый цикл. Таким образом, установка правильного Equaon 6-4 Образец 6-7 Типичный Значения для минимума Длина фазы для Велосипедное время «Звонок» — это термин, используемый описать наличие транспортных средств или пешеходы на детекторы. Когда фаза заканчивается на своем максимум зеленый меня (вместо разрыв в движении), фаза считается â € œmaxed out.â €
Руководство по синхронизации сигналов, второе издание 6-8 Глава 6. Межсекундная / несогласованная синхронизация куда Gmin = длина минимального интервала между зелеными сигналами (секунды), Y = длина желтого интервала смены (секунды), Rclear = длина интервала очистки красного (в секундах), и w = расстояние от ограничительной линии до дальней стороны последней полосы движения (футы). Предполагается, что скорость движения велосипеда составляет 10 миль в час (14,7 футов в секунду). уравнение, и эффективное время потери запуска, равное 6 секундам, используется для представления время, потраченное на то, чтобы среагировать на зеленую индикацию и затем разогнаться до полной скорости.Типичный значения минимальной длины фазы, используемой в велосипедной среде, приведены в Приложение 6-7. Расстояние перехода велосипеда (расстояние от предела Линия до дальней стороны последней конфликтной полосы) (футы) Минимальная длина фазы (секунды) 40 9,1 50 9,8 60 10,5 70 11,2 80 11,9 90 12,5 100 13,2 110 13,9 120 14,6 130 15,3 140 15,9 150 16,6 160 17,3 170 18,0 180 18,7 6.1.4 Максимальный зеленый Максимальный зеленый параметр представляет максимальное количество времени, в течение которого зеленая индикация сигнала может отображаться при наличии звонка на конфликтной фазе.Слишком длинный зеленый максимум может привести к потере времени на перекрестке, и движения, которые в результате испытывают длительные задержки, могут попасть в очередь. Если максимальное значение зеленого слишком короткое, тогда емкость фазы может быть недостаточной для спрос на трафик, и некоторые автомобили останутся необслуженными в конце зеленого интервала. Как показано на Приложении 6-8, таймер максимального количества зеленого начинает отсчет времени при наличии конфликтный звонок. Если есть спрос на текущую фазу и нет конфликтующих вызовов, максимальный зеленый таймер будет сброшен до максимального значения до тех пор, пока происходит встречный вызов.Максимум зеленого цвета используется для ограничения задержки любого движения на перекрестке и сохраняет длину цикла на желаемом максимальном уровне. Он также защищает от длинных зеленых раз из-за непрерывного спроса или неисправных детекторов. Нормальный режим отказа извещатель должен постоянно обращаться в службу поддержки, поэтому неисправный извещатель на фазе будет заставьте максимум зеленого цвета этой фазы включаться в каждый цикл. Таким образом, установка правильного Equaon 6-4 Образец 6-7 Типичный Значения для минимума Длина фазы для Велосипедное время «Звонок» — это термин, используемый описать наличие транспортных средств или пешеходы на детекторы.Когда фаза заканчивается на своем максимум зеленый меня (вместо разрыв в движении), фаза считается «исчерпаны». Руководство по синхронизации сигналов, второе издание Глава 6. Межсекундный / несогласованный тайминг 6-9 максимальная продолжительность зеленого света потенциально может минимизировать воздействие на движение транспорта в случае отказ детектора. В идеале максимальный зеленый цвет не будет достигнут, потому что система обнаружения будет Найдите промежуток для завершения фазы (подробно обсуждается в Разделе 6.1.5). Однако если есть непрерывные обращения за помощью на текущем этапе и вызов на один или несколько конфликтующих фаз, максимальный зеленый параметр в конечном итоге завершит текущую фазу.6.1.4.1 Условия эксплуатации для максимальной экологичности Максимальное значение зеленого обычно рассчитывается на основе объемов трафика и обычно не меняется в зависимости от характеристик операционной среды. Один Исключение составляют второстепенные жилые улицы, где максимальная протяженность зеленых насаждений может способствовать сквозной трафик. 6.1.4.2 Типичные значения максимального зеленого Максимальное значение зеленого цвета должно превышать продолжительность зеленого цвета, необходимую для обслуживания типичная максимальная очередь и, таким образом, позволяет фазе адаптироваться от цикла к циклу пики спроса.Правильно рассчитанная максимальная продолжительность зеленого цвета обычно приводит к частое завершение фазы из-за выхода из строя (при пропуске трафика, указывающем на неэффективный низкий уровень, приводит к концу фазы) при низких или умеренных объемах и при случайных максимальных в пиковые периоды. На Таблице 6-9 представлены некоторые типичные диапазоны максимального зеленого на основе различных типы объектов. Максимальные значения зеленого цвета, показанные на Приложении 6-9, следует использовать в качестве исходных. Приложение 6-8 Максимум Зеленый
Руководство по синхронизации сигналов, второе издание 6-10 Глава 6.Intersecon / несогласованное время точки и скорректированы в зависимости от условий поля. Хорошая практика — варьировать максимум зеленого продолжительность по времени суток, потому что объемы трафика могут сильно колебаться между часами пик и непиковой нагрузкой. (Повременные планы подробно описаны в разделе 6.3.) Тип фазы Тип объекта Максимум зеленый (секунды) Через Основная артерия (> 40 миль / ч) от 50 до 70 Основная артерия (â ¤ 40 миль в час) от 40 до 60 Малая артериальная от 30 до 50 Коллектор, местный или подъездная дорога с 20 по 40 Leˆ Turn Any 15 на 30 6.1.5 Время прохождения (продление единицы или время паузы) Время прохождения (также называемое продлением единицы или временем перерыва) — это параметр, который можно использовать для завершения текущей фазы при обнаружении перерыва в трафике. Пробел указывает на то, что трафик больше не работает с низкими эффективными тарифами и часто ассоциируется с движение вперед более 2–3 секунд на каждой полосе движения. Вызов транспорта продлит зеленое время на текущей фазе до тех пор, пока интервал занятости извещателя не превысит назначенное время прохождения. Если объемы достаточно низкие, время прохождения позволяет фазе закончиться до ее завершения. максимальное зеленое время.Если время прохождения слишком короткое, грин может закончиться преждевременно — до того, как автомобили будут должным образом обслужены. Если интервал между проходами установлен слишком большим, другие перемещения будут задерживаться из-за ненужного продления фазы. Время прохождения, по сути, управляется таймером, который начинает отсчитывать время от снимается мгновенное срабатывание детектора (т.е. пользователь покидает детектор). В современном Контроллер, таймер прохода постоянно работает и истекает по истечении времени ожидания. А последующее срабатывание (т.е., другой пользователь, пересекающий детектор) сбросит проход таймер, если он еще не истек. Зеленый интервал может быть увеличен до максимума. зеленое время, пока таймер перехода еще отсчитывает время. Текущая фаза только пропадет (т. е. завершить работу до истечения максимального времени зеленого), если выполнены все следующие условия. встретил: 1. Истек минимальный зеленый таймер. 2. Вызов ожидает обслуживания на конфликтной фазе. 3. Таймер перехода истек. На рис. 6-10 показаны транспортные средства, движущиеся над типичным детектором движения назад, и показано, как что влияет на таймер прохождения и окончательное завершение фазы через промежуток вне.Режим детектора (импульсный или присутствующий) чрезвычайно важен для прохождения время. Импульсный режим обеспечивает однократный импульс (сбрасывается только после того, как автомобиль покидает детектор), поэтому таймер проезда может отключиться, если над детектором сидит машина. За это Причина в том, что импульсный режим обычно не используется при управлении сигналом дорожного движения, за исключением случаев, когда система детекторы устанавливаются только для подсчета транспортных средств (при отсутствии очереди). Если системные датчики используются для измерения присутствия, они должны быть в режиме присутствия и должны располагаться за пределами обычных очередей на перекрестках.Образец 6-9 Типичный Значения для максимума Зеленый На основе Тип объекта «Хидвей» означает я между двумя последовательные транспортные средства как они передают точку проезжая часть, измеряется от обычный автомобиль особенность (например, перед ось или передний бампер). Когда проход Срок действия мер истекает (мес out), обычно называемый «пробелом» out. »
Руководство по синхронизации сигналов, второе издание 6-10 Глава 6. Межсекундная / несогласованная синхронизация точки и скорректированы в зависимости от условий поля.Хорошая практика — варьировать максимум зеленого продолжительность по времени суток, потому что объемы трафика могут сильно колебаться между часами пик и непиковой нагрузкой. (Повременные планы подробно описаны в разделе 6.3.) Тип фазы Тип объекта Максимум зеленый (секунды) Через Основная артерия (> 40 миль / ч) от 50 до 70 Основная артерия (â ¤ 40 миль в час) от 40 до 60 Малая артериальная от 30 до 50 Коллектор, местный или подъездная дорога с 20 по 40 Leˆ Turn Any 15 на 30 6.1.5 Время прохождения (время продления или паузы) Время прохождения (также называемое продлением единицы или временем перерыва) — это параметр, который можно использовать для завершения текущей фазы при обнаружении перерыва в трафике.Пробел указывает на то, что трафик больше не работает с низкими эффективными тарифами и часто ассоциируется с движение вперед более 2–3 секунд на каждой полосе движения. Вызов транспорта продлит зеленое время на текущей фазе до тех пор, пока интервал занятости извещателя не превысит назначенное время прохождения. Если объемы достаточно низкие, время прохождения позволяет фазе закончиться до ее завершения. максимальное зеленое время. Если время прохождения слишком короткое, грин может закончиться преждевременно — до того, как автомобили будут должным образом обслужены.Если интервал между проходами установлен слишком большим, другие перемещения будут задерживаться из-за ненужного продления фазы. Время прохождения, по сути, управляется таймером, который начинает отсчитывать время от снимается мгновенное срабатывание детектора (т.е. пользователь покидает детектор). В современном Контроллер, таймер прохода постоянно работает и истекает по истечении времени ожидания. А последующее срабатывание (то есть, если другой пользователь пересекает детектор) сбросит проход таймер, если он еще не истек.Зеленый интервал может быть увеличен до максимума. зеленое время, пока таймер перехода еще отсчитывает время. Текущая фаза только пропадет (т. е. завершить работу до истечения максимального времени зеленого), если выполнены все следующие условия. встретил: 1. Истек минимальный зеленый таймер. 2. Вызов ожидает обслуживания на конфликтной фазе. 3. Таймер перехода истек. На рис. 6-10 показаны транспортные средства, движущиеся над типичным детектором движения назад, и показано, как что влияет на таймер прохождения и окончательное завершение фазы через промежуток вне.Режим детектора (импульсный или присутствующий) чрезвычайно важен для прохождения время. Импульсный режим обеспечивает однократный импульс (сбрасывается только после того, как автомобиль покидает детектор), поэтому таймер проезда может отключиться, если над детектором сидит машина. За это Причина в том, что импульсный режим обычно не используется при управлении сигналом дорожного движения, за исключением случаев, когда система детекторы устанавливаются только для подсчета транспортных средств (при отсутствии очереди). Если системные датчики используются для измерения присутствия, они должны быть в режиме присутствия и должны располагаться за пределами обычных очередей на перекрестках.Образец 6-9 Типичный Значения для максимума Зеленый На основе Тип объекта «Хидвей» означает я между двумя последовательные транспортные средства как они передают точку проезжая часть, измеряется от обычный автомобиль особенность (например, перед ось или передний бампер). Когда проход Срок действия мер истекает (мес out), обычно называемый «пробелом» out. » Руководство по синхронизации сигналов, второе издание Глава 6. Межсекундный / несогласованный тайминг 6-11 При использовании режима присутствия скорость транспортных средств, пересекающих датчики и размер детекторов является важным фактором для определения времени прохождения.Большой обнаружение зоны (от 60 до 80 футов) позволяет сократить время прохождения почти до нуля, обеспечивает более эффективное обнаружение стоп-бара без страха зазора, так как даже медленно движущиеся автомобили обычно не оставляют зазора 60 футов. Когда у детекторов стоп-бара есть проход время, существует эффективное «потерянное время», когда последнее транспортное средство покидает зону обнаружения, так как сигнал не становится желтым до тех пор, пока автомобиль не покинет полосу остановки. В типичной последовательности фазирования с двойным кольцом с ведущими фазами левого поворота оба прохода таймеры для двух параллельных фаз (обычно двух сквозных фаз), предшествующих барьер должен истечь по тайм-ауту, прежде чем может произойти обрыв фазы (из-за пропадания).Если Используется функция «одновременного выхода», истекший таймер прохода (достигший нуля) может быть сброшен с последующим срабатыванием до завершения фазы, если фаза в Приложение 6-10 Пассаж. Время
Руководство по синхронизации сигналов, второе издание 6-12 Глава 6. Межсекундная / несогласованная синхронизация другое кольцо не разорвалось. Однако одновременный разрыв не рекомендуется в средах со средним и большим объемом, потому что он не обеспечивает эффективных операций.Обратите внимание, что истекший таймер прохода можно сбросить до окончания минимального зеленого интервал независимо от настройки одновременного выхода. Взаимосвязь между временем прохождения и низкой скоростью проиллюстрирована на Рисунке 6-11. Первоначально низкая скорость увеличивается в начале зеленого до максимальной скорости (после потерянное время при запуске). В этом примере максимальная низкая скорость показана на 1900 транспортных средствах. в час. Этот пример предназначен для того, чтобы показать, как изменение времени перехода изменит точка, в которой фаза заканчивается.Например, время прохождения 2 секунды переводится в низкая скорость около 1800 автомобилей в час. Учитывая время перехода 2 секунды, таймер прохождения не истечет до 2 секунд после того, как низкая скорость упадет ниже 1800 машин в час. Таким образом, если это падение с низкой скорости (ниже 1800 автомобилей в час) происходит при Через 15 секунд после начала зеленого цвета дорожный сигнал станет желтым через 17 секунд. Если время перехода составляет 3 секунды, то таймер перехода истекает через 17 секунд с этот профиль с низкой скоростью, и сигнал трафика станет желтым через 20 секунд.Обратите внимание, что низкие значения ставки приведены для примера; перекрестки будут иметь разную низкую скорость профили. Хотя низкие скорости, связанные с каждым временем прохождения, останутся постоянными, точка, в которой низкая скорость падает ниже этих постоянных значений, будет зависеть от местных условия. Приложение 6-11 Пассаж. Время и скорость потока Отношения
Руководство по синхронизации сигналов, второе издание 6-12 Глава 6. Межсекундная / несогласованная синхронизация другое кольцо не разорвалось. Однако одновременный разрыв не рекомендуется в средах со средним и большим объемом, потому что он не обеспечивает эффективных операций.Обратите внимание, что истекший таймер прохода можно сбросить до окончания минимального зеленого интервал независимо от настройки одновременного выхода. Взаимосвязь между временем прохождения и низкой скоростью проиллюстрирована на Рисунке 6-11. Первоначально низкая скорость увеличивается в начале зеленого до максимальной скорости (после потерянное время при запуске). В этом примере максимальная низкая скорость показана на 1900 транспортных средствах. в час. Этот пример предназначен для того, чтобы показать, как изменение времени перехода изменит точка, в которой фаза заканчивается.Например, время прохождения 2 секунды переводится в низкая скорость около 1800 автомобилей в час. Учитывая время перехода 2 секунды, таймер прохождения не истечет до 2 секунд после того, как низкая скорость упадет ниже 1800 машин в час. Таким образом, если это падение с низкой скорости (ниже 1800 автомобилей в час) происходит при Через 15 секунд после начала зеленого цвета дорожный сигнал станет желтым через 17 секунд. Если время перехода составляет 3 секунды, то таймер перехода истекает через 17 секунд с этот профиль с низкой скоростью, и сигнал трафика станет желтым через 20 секунд.Обратите внимание, что низкие значения ставки приведены для примера; перекрестки будут иметь разную низкую скорость профили. Хотя низкие скорости, связанные с каждым временем прохождения, останутся постоянными, точка, в которой низкая скорость падает ниже этих постоянных значений, будет зависеть от местных условия. Приложение 6-11 Пассаж. Время и скорость потока Отношения Руководство по синхронизации сигналов, второе издание Глава 6. Межсекундный / несогласованный тайминг 6-13 Важно понять, что таймер прохода напрямую связан с эффективность на сигнальном перекрестке.Задача — максимально приблизиться к оптимальному значение времени прохождения максимально практично без сокращения фазы. (См. Раздел 6.1.5.2 для информацию о функции уменьшения зазора.) Если движение небольшое, дайте несколько дополнительных секунд, чтобы менее эффективные операции (т. е. минимумы ниже максимальной скорости) могут иметь минимальные влияние на другой трафик. Однако, если на любом подходе перекресток перегружен, несколько лишние секунды неэффективного низа могут быть вредны для других движений. Как время прохождения увеличивается, количество неэффективного минимума увеличивается, потому что трафик сигнал будет оставаться зеленым в течение выбранного времени перехода после того, как последний автомобиль будет обнаруживается с соответствующей низкой скоростью.Даже если нет транспортных средств после того, как последний автомобиль обнаружен на измеренной низкой скорости, сигнал трафика останется зеленым в течение время прохождения. 6.1.5.1 Соображения рабочей среды для времени прохождения Действия пешеходов не влияют на время перехода; пешеходные интервалы будут время независимо от того, установлен ли таймер прохода или истек. Велосипеды обычно размещены через соответствующий минимальный интервал между зелеными насаждениями (см. Приложение 6-7) и также не являются фактором при определении времени прохождения.Под определенным грузовиком, работающим характеристики окружающей среды, увеличивающее время прохождения для лучшего размещения грузовиков может быть желательным в зависимости от схемы обнаружения. Соображения для грузовиков и транзита также можно решить с помощью преференциального режима (обсуждается в главе 10). 6.1.5.2 Типичные значения времени прохождения Подходящее время прохождения, используемое для конкретной фазы сигнала, зависит от многих факторов, включая схему обнаружения (например, тип и количество зон обнаружения на полосу, как а также расположение и размер зон обнаружения), режим обнаружения (рекомендуется присутствие), и скорость приближения.В идеале обнаружение спроектировано и время прохождения выбрано таким образом, чтобы гарантировать что система обеспечивает эффективное обслуживание очереди и безопасное завершение фазы на более высоких скорость подходит. Важно понимать, что таймер прохода, связанный с Фаза основана на единственном детекторе на одной полосе. На Таблице 6-12 приведены типичные значения времени прохождения для поддержания низкой скорости 1200. автомобилей в час (интервал 3 секунды) для диапазона скоростей и зоны обнаружения длины. Эти значения предполагают наличие одного детектора на одной полосе (т.е., либо неудача детектор или детектор стоп-бара). Детекторы стоп-бара обычно имеют большую площадь (например, 6 футов на 60 футов), а детекторы понижения обычно имеют небольшую площадь (например, 6 футов на 6 футов). Если оба Доступны обнаружение задержки и обнаружение стоп-бара, значения в таблице предполагают что таймер прохода был переведен исключительно на детектор задержки. â € œStop отключение датчика стержня — функция большинства современных контроллеров (и имеет множество разные названия). Детекторы понижения обычно имеют время прохождения от 2 до 3 секунд, если на каждой полосе используется один детектор.Если несколько дорожек связаны с фазой, а входы детектора подключены отдельно время прохождения можно синхронизировать с детекторной функцией современных контроллеров. Как правило, в современных контроллерах есть два места, где время перехода может быть назначены — функция детектора и таблица фаз. Обратите внимание, что если время перехода указано на функции детектора время прохождения в таблице фаз должно быть нулевым, чтобы не иметь взаимодействующие два или более таймера. Практикующий должен ссылаться на конкретные инструкции по контроллеру для получения подробной информации.
Руководство по синхронизации сигналов, второе издание 6-14 Глава 6. Межсекундная / несогласованная синхронизация Зона Детекон Длина (футы) Время прохождения (с интервалом 3 секунды) (секунды) Отправленная скорость (миль / ч) 25 30 35 40 45 50 55 6 2,3 2,4 2,5 2,6 2,6 2,6 2,7 20 1,9 2,1 2,2 2,3 2,4 2,5 2,5 40 1,4 1,6 1,8 2,0 2,1 2,2 2,3 60 0,8 1,2 1,4 1,6 1,8 1,9 2,0 80 0,3 0,7 1,1 1,3 1,5 1,6 1,8 Как показано на Приложении 6-12, чем длиннее зона обнаружения, тем меньше требуется время прохождения.Более короткие зоны обнаружения увеличивают вероятность разрыва фазы из-за вялого движения. Для медленно движущихся транспортных средств (например, грузовиков) может потребоваться более длительный проезд. время для достижения короткой зоны обнаружения, сбросьте таймер прохождения и продолжите через перекресток до истечения времени ожидания фазы. Зоны длиной 60 футов и более будут практически не имеют вероятности вырваться из игры даже при небольшом времени прохождения или его отсутствии. С использованием более длинные зоны обнаружения и более короткое время прохождения приводят к минимальной «потере времени» после того, как последний автомобиль отъезжает от стоп-бара.Значения, представленные в Приложении 6-12, могут быть использованы в качестве отправной точки, и если корректировки желательны, следует соблюдать следующие руководящие принципы (10): 1. Обеспечьте очистку очереди. Время прохождения не должно быть настолько маленьким, чтобы результирующий прогресс приводит к частым преждевременным выходам из фазы непреднамеренно (т. е. разрыв, возникающий до того, как очередь будет полностью обслужена). А преждевременный разрыв оставит часть остановленной очереди необслуженной и, таким образом, это приведет к увеличению задержек и возможному увеличению количества запросов в очереди.2. Уменьшите максимальную выходную частоту. Время прохождения не должно быть настолько большим, чтобы результирующая операция приводит к частым максимальным выходам фазы. Вдоль время прохождения позволит даже легким транспортным потокам увеличить зеленый цвет до использовать полностью. Пользователи, ожидающие большего объема, могут быть с задержкой. В определенных средах с большими объемами можно использовать функции уменьшения зазоров для большего эффективные разрывы, особенно на подходах с несколькими полосами движения. Благодаря функции уменьшения зазора изначально используется более высокое время прохождения, чтобы предотвратить преждевременный выход из строя, когда транспортные средства медленно очищая перекресток.По истечении заданного времени («время до редукции») время прохождения сокращается до минимального значения зазора за счет постепенного уменьшения в течение заданное время («время для уменьшения») по мере уменьшения уровня транспортного средства (показано на Приложении 6-13). Параметр «Время до сокращения» устанавливает время, которое может истечь. после поступления конфликтного вызова и до начала перехода время начинает сокращаться. Один раз время до истечения периода сокращения, время прохождения сокращается линейно пока не истечет срок сокращения.Сокращение времени прохождения до минимального зазора значение позволяет фазе более легко разрываться по мере продвижения фазы. Образец 6-12 Типичный Ценности для прохождения Время
Руководство по синхронизации сигналов, второе издание 6-14 Глава 6. Межсекундная / несогласованная синхронизация Зона Детекон Длина (футы) Время прохождения (с интервалом 3 секунды) (секунды) Отправленная скорость (миль / ч) 25 30 35 40 45 50 55 6 2,3 2,4 2,5 2,6 2,6 2,6 2,7 20 1,9 2,1 2,2 2,3 2,4 2,5 2,5 40 1,4 1,6 1,8 2,0 2,1 2.2 2.3 60 0,8 1,2 1,4 1,6 1,8 1,9 2,0 80 0,3 0,7 1,1 1,3 1,5 1,6 1,8 Как показано на Приложении 6-12, чем длиннее зона обнаружения, тем меньше требуется время прохождения. Более короткие зоны обнаружения увеличивают вероятность разрыва фазы из-за вялого движения. Для медленно движущихся транспортных средств (например, грузовиков) может потребоваться более длительный проезд. время для достижения короткой зоны обнаружения, сбросьте таймер прохождения и продолжите через перекресток до истечения времени ожидания фазы. Зоны длиной 60 футов и более будут практически не имеют вероятности вырваться из игры даже при небольшом времени прохождения или его отсутствии.С использованием более длинные зоны обнаружения и более короткое время прохождения приводят к минимальной «потере времени» после того, как последний автомобиль отъезжает от стоп-бара. Значения, представленные в Приложении 6-12, могут быть использованы в качестве отправной точки, и если корректировки желательны, следует соблюдать следующие руководящие принципы (10): 1. Обеспечьте очистку очереди. Время прохождения не должно быть настолько маленьким, чтобы результирующий прогресс приводит к частым преждевременным выходам из фазы непреднамеренно (т. е. разрыв, возникающий до того, как очередь будет полностью обслужена).А преждевременный разрыв оставит часть остановленной очереди необслуженной и, таким образом, это приведет к увеличению задержек и возможному увеличению количества запросов в очереди. 2. Уменьшите максимальную выходную частоту. Время прохождения не должно быть настолько большим, чтобы результирующая операция приводит к частым максимальным выходам фазы. Вдоль время прохождения позволит даже легким транспортным потокам увеличить зеленый цвет до использовать полностью. Пользователи, ожидающие большего объема, могут быть с задержкой. В определенных средах с большими объемами можно использовать функции уменьшения зазоров для большего эффективные разрывы, особенно на подходах с несколькими полосами движения.Благодаря функции уменьшения зазора изначально используется более высокое время прохождения, чтобы предотвратить преждевременный выход из строя, когда транспортные средства медленно очищая перекресток. По истечении заданного времени («время до редукции») время прохождения сокращается до минимального значения зазора за счет постепенного уменьшения в течение заданное время («время для уменьшения») по мере уменьшения уровня транспортного средства (показано на Приложении 6-13). Параметр «Время до сокращения» устанавливает время, которое может истечь. после поступления конфликтного вызова и до начала перехода время начинает сокращаться.Один раз время до истечения периода сокращения, время прохождения сокращается линейно пока не истечет срок сокращения. Сокращение времени прохождения до минимального зазора значение позволяет фазе более легко разрываться по мере продвижения фазы. Образец 6-12 Типичный Ценности для прохождения Время Руководство по синхронизации сигналов, второе издание Глава 6. Межсекундный / несогласованный тайминг 6-15 Возможности уменьшения зазора также могут быть продемонстрированы с использованием концепции расхода. представлен на Приложении 6-11. Момент окончания фазы будет зависеть от нижнего профиль скорости, особенности сокращения разрыва и конфликтный трафик.Иллюстрация 6-14 иллюстрирует как использовать функцию уменьшения разрыва (в данном случае, используя 3-секундное время прохождения и 2 секунды минимального промежутка времени) приводит к прерыванию фазы между тем, что могло быть было достигнуто при значении времени прохождения 2 или 3 секунды. Приложение 6-13. Отношения между Время прохождения, Минимальный разрыв, время перед Редуконом и Время сокращать
6-16 Глава 6. Межсекундная / несогласованная синхронизация 6.1.6 Интервалы пешеходов Пешеходная фаза состоит из трех интервалов: прогулка, крепление не ходи (FDW), и устойчиво не ходите (как показано на рисунке 6-15).Интервал прогулки обычно начинается в начало одновременного зеленого интервала движения транспортных средств и используется для того, чтобы пешеходы могли реагировать на начало фазы и выезжать на пешеходный переход. Интервал FDW следует интервал ходьбы и информирует пешеходов о завершении этапа. Обычно FDW заканчивается в начале желтого цвета, что необходимо для обратного отсчета пешеходных сигналов. (Обратите внимание, что окончание FDW в начале желтого цвета автоматически соответствует 3- второй буферный интервал, необходимый для MUTCD [2].) В то время как интервал FDW можно назвать интервалом разрешения пешеходов в некоторых контроллеры, это не обязательно точно. Интервал разрешения пешехода — это время требуется, чтобы перейти улицу, и интервал FDW, как правило, соответствует разрешению для пешеходов. интервал сокращается за счет желтого изменения и красных интервалов зазора. Хотя некоторые агентства может выбрать более длительное время для пешеходов, не включая желтый и красный оформление, не требуется. Устойчивый интервал отсутствия ходьбы следует за интервалом FDW.Время устойчивой остановки не является программируемым параметром в контроллере. В Продолжительность устойчивого интервала отсутствия ходьбы — это просто длина фазы за вычетом интервалы ходьбы и FDW. Однако, согласно MUTCD, он должен отображаться как минимум 3 раза. секунд до выпуска любого мошенничества разрешение движения автотранспорта (2). Интервалы пешеходной прогулки и FDW обычно совпадают с интервалами движения автомобиля. интервалы. Минимальная продолжительность прогулки программируется в контроллере; Настоящий интервал ходьбы может быть больше в зависимости от многих других настроек контроллера, которые обсуждается в главе 7.Практикующий должен учитывать внутреннюю влияние пешехода Приложение 6-14 Разрыв Редукон Особенности и расход Отношения Руководство по синхронизации сигналов, второе издание
Руководство по синхронизации сигналов, второе издание Глава 6. Межсекундный / несогласованный тайминг 6-17 интервалы для других пользователей на перекрестке. Если пешеходные интервалы требуют большего времени, чем требуется для транспортных средств или разрешено максимальным зеленым таймером, транспортное средство Фаза будет продолжаться до тех пор, пока не истечет интервал времени пешехода FDW.6.1.6.1 Условия эксплуатации при интервале пешеходов Длина пешеходных интервалов может быть увеличена в зависимости от количества пешеходов, характеристики пешеходов (например, пожилые пешеходы или школьники) и объекты характеристики (например, расположение пешеходных кнопок и пешеходного перехода расстояния). Более длительный интервал ходьбы может рассматриваться при большом количестве пешеходов, и более длительный интервал FDW может использоваться вблизи мест, где пользователям требуется дополнительное время. Можно рассматривать ведущие пешеходные интервалы с большим количеством пешеходов или с определенными проблемами безопасности пешеходов (такими как большое количество поворотов транспортных средств).Ведущий пешеходные интервалы — это процедура, позволяющая пешеходам констатировать свое присутствие на пешеходном переходе, что снижает помехи от поворота транспортных средств. Больше информации приведено в разделе 6.1.6.6. 6.1.6.2 Типичные значения интервала пешеходной прогулки Интервал между прогулками должен давать пешеходам достаточно времени, чтобы индикация ходьбы и выезд за бордюр до начала интервала FDW. Другими словами, это должен быть достаточно длинным, чтобы позволить пешеходу или нескольким пешеходам на высокой пешеходной места для выхода на пешеходный переход.В руководстве MUTCD (2) указано, что прогулка интервал должен быть не менее 7 секунд. В зонах с высокой пешеходной нагрузкой (например, школьные зоны, центральные деловые районы (CBD), спортивные площадки и места проведения мероприятий), следует учитывать более длительные интервалы ходьбы. Типичные значения для пешеходной прогулки интервалы представлены в Приложении 6-16. Эти значения основаны на информации из Справочник по MUTCD и устройствам управления трафиком (2, 5). Приложение 6-15. Пешеходные интервалы Длина прогулки интервал может быть установлен в местных агентская политика.
Руководство по синхронизации сигналов, второе издание 6-18 Глава 6. Межсекундное / несогласованное время Condions Интервал ходьбы (секунды) Зона с большим количеством пешеходов (например, школа, центральный деловой район или спортивная и спортивная площадки). место проведения мероприятия) 10-15 Типичный пешеходный поток и большая продолжительность цикла от 7 до 10 Типичный пешеходный поток и более короткая продолжительность цикла 7 Незначительный пешеходный поток и большая длина цикла 4 6.1.6.3 Типичные значения расстояния для пешеходов Разрешение на пешеходов — это время, необходимое пешеходу для полного перехода улица, предполагая, что интервал ходьбы истек, а интервал FDW только начался.Один опция специального использования использует обнаружение пешеходов для автоматического регулирования пешехода время разрешения, основанное на фактической скорости пешехода или ширине пешеходного перехода, но более традиционный процесс заключается в расчете необходимого разрешения для пешеходов с использованием заданная скорость ходьбы. MUTCD (2) утверждает, что разрешение на пешеходов времени должно быть достаточно, чтобы пешеход ходьба со скоростью 3,5 фута в секунду для перехода от бордюра или обочины как минимум до (а) дальней стороны пройденного пути или (б) к медиане достаточной ширина для ожидания пешеходов (2).Где медленнее пешеходы обычно используют переход, пешеходные скорость менее 3,5 футов в секунду может быть учитывается при определении пешехода время оформления. В качестве альтернативы MUTCD (2) описывает возможность использования скорости ходьбы до 4 футов в секунду, чтобы оценить, действительно ли пешеход время оформления достаточно. Этот вариант может быть применяется в местах, где расширенная кнопка была установлена функция пресса для более медленного пешеходы возможность запросить и получить более длительное время пропуска пешеходов.Пример Вывеска с расширенной обработкой кнопок показана на Приложении 6-17. Используя установленную скорость ходьбы, можно рассчитать время пропуска пешехода. используя уравнение 6-5. Для расчета времени FDW, которое обычно программируется в Таблица фаз контроллера сигналов, практикующий должен вычесть желтое изменение и красное время временного интервала освобождения от рассчитанного времени освобождения пешехода. куда PCT = время разрешения пешехода (секунды), Dc = расстояние пешеходного перехода (футы), и vp = скорость пешехода (футов в секунду).Типичные значения времени пропуска пешехода (рассчитанные по уравнению 6-5), предполагая, что скорость ходьбы 3,5 фута в секунду, для различных пешеходных переходов расстояния показано на Приложении 6-18. Образец 6-16 Типичный Ценности для пешеходов Интервал ходьбы Приложение 6-17 Пример расширенного толчка BuŒon Press Funcon Вывески Equaon 6-5
Руководство по синхронизации сигналов, второе издание 6-18 Глава 6. Межсекундное / несогласованное время Condions Интервал ходьбы (секунды) Зона повышенной проходимости (напр.г., школа, CBD или спорт и место проведения мероприятия) 10-15 Типичный пешеходный поток и большая продолжительность цикла от 7 до 10 Типичный пешеходный поток и более короткая продолжительность цикла 7 Незначительный пешеходный поток и большая длина цикла 4 6.1.6.3 Типичные значения расстояния для пешеходов Разрешение на пешеходов — это время, необходимое пешеходу для полного перехода улица, предполагая, что интервал ходьбы истек, а интервал FDW только начался. Один опция специального использования использует обнаружение пешеходов для автоматического регулирования пешехода время разрешения, основанное на фактической скорости пешехода или ширине пешеходного перехода, но более традиционный процесс заключается в расчете необходимого разрешения для пешеходов с использованием заданная скорость ходьбы.MUTCD (2) утверждает, что разрешение на пешеходов времени должно быть достаточно, чтобы пешеход ходьба со скоростью 3,5 фута в секунду для перехода от бордюра или обочины как минимум до (а) дальней стороны пройденного пути или (б) к медиане достаточной ширина для ожидания пешеходов (2). Где медленнее пешеходы обычно используют переход, пешеходные скорость менее 3,5 футов в секунду может быть учитывается при определении пешехода время оформления. В качестве альтернативы MUTCD (2) описывает возможность использования скорости ходьбы до 4 футов в секунду, чтобы оценить, действительно ли пешеход время оформления достаточно.Этот вариант может быть применяется в местах, где расширенная кнопка была установлена функция пресса для более медленного пешеходы возможность запросить и получить более длительное время пропуска пешеходов. Пример Вывеска с расширенной обработкой кнопок показана на Приложении 6-17. Используя установленную скорость ходьбы, можно рассчитать время пропуска пешехода. используя уравнение 6-5. Для расчета времени FDW, которое обычно программируется в Таблица фаз контроллера сигналов, практикующий должен вычесть желтое изменение и красное время временного интервала освобождения от рассчитанного времени освобождения пешехода.куда PCT = время разрешения пешехода (секунды), Dc = расстояние пешеходного перехода (футы), и vp = скорость пешехода (футов в секунду). Типичные значения времени пропуска пешехода (рассчитанные по уравнению 6-5), предполагая, что скорость ходьбы 3,5 фута в секунду, для различных пешеходных переходов расстояния показано на Приложении 6-18. Образец 6-16 Типичный Ценности для пешеходов Интервал ходьбы Приложение 6-17 Пример расширенного толчка BuŒon Press Funcon Вывески Equaon 6-5 Руководство по синхронизации сигналов, второе издание Глава 6.Межсекундный / несогласованный тайминг 6-19 Расстояние перехода пешехода (футы) Расчетное время пропуска пешехода (секунды) 40 11 60 17 80 23 100 29 6.1.6.4 Типичные значения для пешеходов Интервал мигания без ходьбы Интервал FDW для пешеходов (в некоторых таблицы фаз контроллера) можно определить, уменьшив расчетное пересечение время пропуска пешеходов по желтому времени смены и красному времени пропуска. Время FDW отображается во время смены желтого и красных интервалов зазора, по сути, «буферное» время перед конфликтующим движением.Некоторые агентства могут предпочесть более консервативный подход, и не сократит расчетное время пропуска пешеходов на время смены желтого и красного зазора. Практикующий должен проверить стандарт практика посредством обзора политики юрисдикции. 6.1.6.5 Дополнительные указания по интервалам пешеходов — 4-секундная прогулка В то время как пешеходная прогулка с интервалом в 7 секунд обычно подходит для большинства В некоторых ситуациях можно использовать интервалы ходьбы до 4 секунд (2), если пешеходы и характеристики не требуют полного 7-секундного интервала ходьбы.MUTCD (2) В руководстве указано, что общая продолжительность 4-секундной прогулки и разрешения пешехода (рассчитывается со скоростью 3,5 фута в секунду) должно быть достаточно времени, чтобы пешеход отъехал от детектор пешеходов (или, если детектор отсутствует, место в 6 футах от края тротуара или тротуар) в начале указателя сигнала ходьбы в дальнюю сторону проезжаемого пути или медианы, при движении по пешеходному переходу со скоростью 3 фута на второй (см. Приложение 6-19). Любое дополнительное время, необходимое для выполнения условия к интервалу ходьбы следует добавить наведение со скоростью 3 фута в секунду (2).Приложение 6-18. Расчетные значения для Разрешение на пешеходов Время (на основе Скорость ходьбы 3,5 Футов в секунду) Приложение 6-19. Пешеходный интервал Требования на основе на скорости ходьбы
6-20 Глава 6. Межсекундная / несогласованная синхронизация 6.1.6.6 Дополнительные указания по интервалам пешеходов — интервалу между ведущими пешеходами Интервал для пешеходов впереди позволяет отображать индикацию пешеходной фазы для пешеходной фазы. отображается перед соответствующей фазой автомобиля. Эта обработка позволяет пешеходу устанавливают полосу отчуждения на перекрестке, а также могут улучшить видимость пешеходов для водители, велосипедисты и другие пользователи системы.В случае специальных условий для пешеходов, MUTCD (2) утверждает, что если используется ведущий пешеходный интервал, он должен быть не менее 3 секунд по продолжительности, и следует рассмотреть запрет на повороты через пешеходный переход за это время. На Приложении 6-20 для иллюстрации последовательность этапов с ведущими интервалами пешеходов на этапах 2 и 6. 6.1.7 Двойной вход Параметр двойной (двойной) записи используется для вызова фаз автомобиля, которые могут одновременно, даже если только одна из фаз принимает активный вызов.Например, если двойной вход активен для фаз 4 и 8, а на фазе 4 поступает вызов, но вызов не поступает. на Фазе 8 Фаза 8 по-прежнему будет отображаться вместе с Фазой 4. Наиболее частое использование двойной ввод — это активация параметра для совместимых сквозных перемещений. Если двойная параметр входа не выбран, вызов транспортного средства на фазе приведет только к отсчету времени эта фаза при отсутствии вызова на совместимой фазе. 6.1.8 Вызов и режимы памяти Параметр отзыва заставляет контроллер автоматически выполнять вызов для заданная фаза независимо от наличия каких-либо срабатываний детектора.Есть четыре типы отзывов: минимальный отзыв (также известный как отзыв автомобиля), максимальный отзыв, мягкий отзыв и пешеходный отзыв. Если нет отзывов или обслуживаемых вызовов, контроллер может быть настроен на отдых в красном или последнем зеленом. Описания следующие: â € Minimum Recall: Параметр минимального возврата заставляет контроллер разместить вызов в сервисную службу транспортного средства на этапе, чтобы обслужить хотя бы его минимальная продолжительность зеленого цвета. Приложение 6-20 Ведущие Пешеходные интервалы Руководство по синхронизации сигналов, второе издание
Руководство по синхронизации сигналов, второе издание Глава 6.Межсекундный / несогласованный тайминг 6-21 • Максимальный возврат: параметр максимального возврата заставляет контроллер разместить непрерывный вызов в службу технического обслуживания автомобиля на фазе, чтобы запустить ее максимальная продолжительность зеленого цвета в каждом цикле. • Мягкий вызов: параметр мягкого отзыва заставляет контроллер делать вызов для автосервис на фазе при отсутствии исправного конфликтного вызова. • Отзыв пешехода: параметр отзыва пешехода заставляет контроллер разместить непрерывный вызов пешеходной службы на фазе, в результате чего Контроллер рассчитывает интервалы ходьбы и FDW в каждом цикле.• Красный покой: все фазы могут оставаться в красном состоянии, когда нет обслуживаемых вызовов в кольцо и ни один из вышеперечисленных режимов вызова не используются. • Зеленый остаток: если нет обслуживаемого вызова, а также нет отзыва или красного остатка, контроллер будет отдыхать в последнем зеленом. Режимы памяти относятся к способности контроллера «запоминать» (т. Е. Сохранять) детектор. срабатывание для определенной фазы, когда срабатывание получено в течение красного интервала (и, необязательно, желтый интервал). Можно использовать один из двух режимов — без блокировки или блокировка.Режим памяти обычно устанавливается для каждой фазы, хотя некоторые сигналы трафика Контроллеры могут иметь настройки режима памяти, доступные для каждого входа канала детектора. Неблокирующий режим обычно является режимом по умолчанию, но независимо от выбранного в режиме детектора, все срабатывания, полученные в течение зеленого интервала, рассматриваются как неактивные. блокировка контроллером. Описание режимов следующее: • Неблокирующий режим: в неблокирующем режиме срабатывание, полученное от детектор не удерживается контроллером после того, как срабатывание прервано блок детектирования.Контроллер распознает срабатывание только во время время, в течение которого он присутствует в блоке обнаружения. • Режим блокировки: в режиме блокировки первое срабатывание, полученное контроллер на указанном канале в течение красного интервала (и, возможно, желтый интервал) используется контроллером для запуска непрерывного вызова для служба. Этот вызов сохраняется до тех пор, пока не будет обслужена назначенная фаза, независимо от ожидают ли обслуживания какие-либо транспортные средства. 6.1.8.1 Соображения по среде работы с отзывами и режимами памяти Практикующий должен определить настройку отзыва (или позволить красный отдых) на основе рабочая среда.Например, для артериальных сосудов лучше всего использовать мягкий отзыв, если обнаружение существует на всех этапах. Напоминание пешеходов, с другой стороны, может использоваться в места и / или время с большим количеством пешеходов. 6.1.8.2 Типичные параметры для вызовов и режимов памяти Некоторые настройки режима отзыва и памяти могут быть более подходящими, чем другие в зависимости от конструкции обнаружения и предполагаемых операций с сигналом. Приложение 6-21. содержит краткое изложение типичных схем обнаружения и соображения для различных отзывов и настройки режима памяти.Это руководство предполагает наличие одного детектора на полосе движения. Пересечения с более сложными конструкциями детекторов будут иметь другие настройки и необходимо оценивать в индивидуальном порядке. Напоминание и память режимы — контроллер видит это место призывает к особому фаза так, чтобы фаза будет обслужена либо автоматически или на основе прошлого автомобили, соответственно.
Руководство по синхронизации сигналов, второе издание 6-22 Глава 6. Межсекундная / несогласованная синхронизация Se нгс Типичный детекон Дизайн Причины использования Re ок lls Нет отзывов Детекторы стоп-бара или детекторы задержки с режим блокировки Относительно небольшой спрос на трафик и фазы не нужно обслуживать каждый цикл.Минимальный отзыв (Отзыв автомобиля) Датчики снижения с не- режим блокировки Ожидается, что фазы будут обслуживаться каждые цикл (например, на главной улице через движения) с зеленым мне быть расширен на основе комплектации автомобилей. Максимальный отзыв без детекторов Фиксированная операция желательна, или пробел выход не желателен. Максимальный отзыв обычно не используется при полностью включенном перекрестки с хорошими системами детектирования и правильное прохождение меня видит. Итак, вызовите извещатели обратного отсчета с режимом блокировки. Используйте на основных улицах для движения к убедитесь, что эти движения будут происходить в зеленый при отсутствии звонков по конфликтным фазы и пропустить главную улицу движения, которые следует пропускать при отсутствии вызовы фазы основной улицы, когда есть вызовы на другие фазы.Напоминание о пешеходе Без детекторов пешехода Ожидается, что пешеходный спрос будет высоким, и пешеходные фазы, как ожидается, будут обслуживается каждый цикл. Красный Отдых Детекторы стоп-бара или детекторы задержки с режим блокировки Обычно на пересечениях без определения основные или второстепенные улицы. M Эм или у M od es Детекторы стоп-бара в неблокирующем режиме Позволяет разрешенное движение (например, вправо- загорается-красный) завершить без вызывая изменение фазы. Датчики режима блокировки без датчиков остановки Использовать на главной улице во время движения связан с низким процентом поворота автомобили при отзыве не используются.Предполагая, что этапы 2 и 6 назначены на главную улицу через движения, На рис. 6-22 показаны типичные настройки для режимов повторного вызова и памяти при полностью включенном пересечение. На полностью задействованных перекрестках, где не могут быть отменены крупные или второстепенные улицы, некоторые агентства могут предпочесть остановиться на последней фазе, остановиться на следующей через фазу, или остановитесь на красном. Это позволяет перекрестку находиться в наиболее надлежащее состояние при отсутствии каких-либо транспортных или пешеходных звонков. Сигналы включения для фаз отключены для фаз Re ок lls Минимальный отзыв (отзыв автомобиля) Нет Все фазы Максимальный отзыв Нет Все фазы Итак… Вспомните 2 и 6 все фазы (кроме 2 и 6) Отзыв пешехода: Нет Все фазы M Эм или у M od es Режим блокировки 1 Нет Все фазы 1 Общие имена в контроллерах светофоров включают «Память», «Красный замок» и т. Д.«Yellow Lock» обеспечивает аналогичные операций, но также позволяет сохранять срабатывания, полученные в течение желтого интервала. Приложение 6-21: отзыв и режим памяти Соображения Образец 6-22 Типичный Посещения отзывов и режимы памяти на полностью запущенном Интерсекон
Руководство по синхронизации сигналов, второе издание 6-22 Глава 6. Межсекундная / несогласованная синхронизация Se нгс Типичный детекон Дизайн Причины использования Re ок lls Нет отзывов Детекторы стоп-бара или детекторы задержки с режим блокировки Относительно небольшой спрос на трафик и фазы не нужно обслуживать каждый цикл.Минимальный отзыв (Отзыв автомобиля) Датчики снижения с не- режим блокировки Ожидается, что фазы будут обслуживаться каждые цикл (например, на главной улице через движения) с зеленым мне быть расширен на основе комплектации автомобилей. Максимальный отзыв без детекторов Фиксированная операция желательна, или пробел выход не желателен. Максимальный отзыв обычно не используется при полностью включенном перекрестки с хорошими системами детектирования и правильное прохождение меня видит. Итак, вызовите извещатели обратного отсчета с режимом блокировки. Используйте на основных улицах для движения к убедитесь, что эти движения будут происходить в зеленый при отсутствии звонков по конфликтным фазы и пропустить главную улицу движения, которые следует пропускать при отсутствии вызовы фазы основной улицы, когда есть вызовы на другие фазы.Напоминание о пешеходе Без детекторов пешехода Ожидается, что пешеходный спрос будет высоким, и пешеходные фазы, как ожидается, будут обслуживается каждый цикл. Красный Отдых Детекторы стоп-бара или детекторы задержки с режим блокировки Обычно на пересечениях без определения основные или второстепенные улицы. M Эм или у M od es Детекторы стоп-бара в неблокирующем режиме Позволяет разрешенное движение (например, вправо- загорается-красный) завершить без вызывая изменение фазы. Датчики режима блокировки без датчиков остановки Использовать на главной улице во время движения связан с низким процентом поворота автомобили при отзыве не используются.Предполагая, что этапы 2 и 6 назначены на главную улицу через движения, На рис. 6-22 показаны типичные настройки для режимов повторного вызова и памяти при полностью включенном пересечение. На полностью задействованных перекрестках, где не могут быть отменены крупные или второстепенные улицы, некоторые агентства могут предпочесть остановиться на последней фазе, остановиться на следующей через фазу, или остановитесь на красном. Это позволяет перекрестку находиться в наиболее надлежащее состояние при отсутствии каких-либо транспортных или пешеходных звонков. Сигналы включения для фаз отключены для фаз Re ок lls Минимальный отзыв (отзыв автомобиля) Нет Все фазы Максимальный отзыв Нет Все фазы Итак… Вспомните 2 и 6 все фазы (кроме 2 и 6) Отзыв пешехода: Нет Все фазы M Эм или у M od es Режим блокировки 1 Нет Все фазы 1 Общие имена в контроллерах светофоров включают «Память», «Красный замок» и т. Д.«Yellow Lock» обеспечивает аналогичные операций, но также позволяет сохранять срабатывания, полученные в течение желтого интервала. Приложение 6-21: отзыв и режим памяти Соображения Образец 6-22 Типичный Посещения отзывов и режимы памяти на полностью запущенном Интерсекон Руководство по синхронизации сигналов, второе издание Глава 6. Межсекундный / несогласованный тайминг 6-23 6.2 КОНФИГУРАЦИИ ДЕТЕКТОРА В этом разделе объясняются следующие параметры детектора, обычно используемые в сигнальные перекрестки: • Задержка, • Время продления / переноса / растяжения, а также • Детектор переключения.Эти параметры детектора применимы только к детекторам транспортных средств (не пешеходов). детекторы). 6.2.1 Задержка Задержка используется для временного отключения выхода детектора для фазы, по существу предотвращение немедленного распознавания действий автомобиля контроллером сигналов. Активация невозможна, пока не истечет время таймера задержки и не произойдет обнаружение. зона все еще занята. Задержку можно запрограммировать на извещателе или в контроллер. Тем не менее, специалист по синхронизации сигналов должен быть осторожен, чтобы не запрограммировать задержка как в извещателе, так и в контроллере, или вызовы могут задерживаться дольше, чем требуется.Таймер задержки активен, только если назначенная ему фаза не зеленая. Задержка обычно применяется к (1) детекторам второстепенных уличных стоп-полос в исключительном праве — полосы поворота и (2) детекторы полосы поворота налево. Задержка используется для предотвращения ошибочных вызовов от регистрируются в контроллере (например, извещатели на полосах левого поворота могут случайно проезжаемый транспортными средствами на другом этапе или пересечение перпендикулярным левым поворотом транспортных средств) или разрешить разрешенное движение без вызова охраняемого фаза.На рис. 6-23 показана задержка, назначенная на исключительное право на остановку детекторов штрихов. повернуть переулок. 6.2.1.1 Типичные значения задержки Подходящие значения для задержки зависят от того, как долго транспортное средство должно занимать детектор до того, как автомобиль покинет этот детектор. Приложение 6-24 представляет собой краткое изложение типичные значения для следующих распространенных приложений: • Задержка может использоваться с полосой остановки, обнаружением режима присутствия для поворота движения с эксклюзивных переулков. Для обнаружения полосы правого поворота задержка должна считается, когда способность правого включения красного превышает правый громкость поворота или конфликтующее движение при отзыве.Если вправо-включить-красный пропускная способность ограничена, тогда задержка может только ухудшить перекресток эффективность за счет дальнейшей задержки автомобилей с поворотом направо. Установка задержки могла диапазон от 8 до 12 секунд, с более высокими значениями, используемыми для более высокого перекрестного уличные тома (10). • Задержка также может использоваться для предотвращения регистрации ошибочного вызова в Контроллер, если транспортные средства имеют тенденцию пересекать другую фазу обнаружения зона. Например, автомобили, поворачивающие налево, часто проезжают перпендикуляр. полоса левого поворота в конце своего поворота.Связанная задержка детектора с неблокируемой памятью не позволил бы сделать вызов для незанятый детектор. Величина задержки зависит от того, как долго извещатель работает. ошибочно занят. Обычно значения варьируются от 2 до 5 секунд.
Руководство по синхронизации сигналов, второе издание 6-24 Глава 6. Межсекундная / несогласованная синхронизация Приложение 6-23 Задержка Таймер
Руководство по синхронизации сигналов, второе издание 6-24 Глава 6. Межсекундная / несогласованная синхронизация Приложение 6-23 Задержка Таймер Руководство по синхронизации сигналов, второе издание Глава 6.Межсекундный / несогласованный тайминг 6-25 Общие приложения для задержки Применимые детекторы Задержка (секунды) Правый поворот-красный при повороте направо Переулки Детекторы второстепенных уличных остановок в эксклюзивные полосы правого поворота с 8 по 12 Предотвращение ошибочного звонка для Le € — Дорожки поворота Датчики стоп-бара на полосах 2–5 левого поворота 6.2.2 Продление времени (время переноса или растяжения) Время продления (также называемое переходящим временем или временем растяжения) — это метод, используемый для увеличения длительность срабатывания детектора. Как и задержка, можно запрограммировать продление времени на детекторе или в контроллере.Специалисты по синхронизации сигналов должны убедиться, что время продления не запрограммировано ни на извещателе, ни в контроллере, либо вызовы могут быть продлен дольше, чем хотелось бы. Таймер продления запускается в момент срабатывания вход канала неактивен. Таким образом, срабатывание детектора длительностью 1 секунду ввод может быть увеличен до 3 секунд, если параметр расширения установлен на 2 секунды. Этот процесс проиллюстрирован на Приложении 6-25. Параметр расширения обычно используется с схемами обнаружения, которые сочетают множественные детекторы отступления на скоростных подходах.Цель при использовании на высоких скоростные подходы (с несколькими детекторами на полосу) для увеличения зеленого интервала, позволяя автомобилю, подъезжающему к перекрестку, добраться до следующего детектор ниже по потоку. После этого автомобиль сможет сделать новый вызов на зеленый удлинение при движении с предполагаемой скоростью. Эту функцию также можно использовать для определения времени перехода от полосы к полосе. Вместо время прохождения контролируется таблицей фаз, детектор умножает параметр, позволяющий рассчитывать время для каждой полосы отдельно.Если используется обнаружение стоп-бара, оно следует использовать функцию отключения извещателя при выходе из строя. Это позволяет стоять в очереди разрядиться, но предотвращает непрерывное удлинение фазы. 6.2.2.1 Типичные значения для продления времени с несколькими детекторами на полосу Время продления, назначенное извещателю, зависит от скорости приближения, размер детектора и расстояние между предметным детектором и следующим ниже по потоку детектор. Для обеспечения эффективности типичные значения находятся в диапазоне до 2 секунд.Более информацию о конкретных значениях времени продления можно найти в Руководстве Trafic. Конструкция детектора (11). Образец 6-24 Типичный Значения задержки
Руководство по синхронизации сигналов, второе издание 6-26 Глава 6. Межсекундная / несогласованная синхронизация Приложение 6-25 Расширение Таймер
Руководство по синхронизации сигналов, второе издание 6-26 Глава 6. Межсекундная / несогласованная синхронизация Приложение 6-25 Расширение Таймер Руководство по синхронизации сигналов, второе издание Глава 6. Межсекундный / несогласованный тайминг 6-27 6.2.3 Переключение детектора Переключение извещателей — обычная функция извещателей в дорожном движении. контроллеры сигналов ic, которые позволяет детекторам вызывать и продлевать одну фазу (продление фазы), а затем отправлять звонки на другая фаза (фаза переключения) по окончании расширенной фазы. Переключение детектора позволяет запрограммированная фаза переключения продлевается после ее завершения. это обычно действует только тогда, когда фаза переключения зеленая. Кроме того, переключение детектора обычно не переключают фазовые вызовы. Переключение извещателей обычно используется в извещателях левого поворота под защитой. разрешенные операции.Транспортные средства, обнаруженные на полосе поворота налево, переключаются, чтобы увеличить через фазу в течение разрешенной части фазы, чтобы предоставить больше времени для автомобилей, совершающих левый поворот. На Таблице 6-26 приводится краткое изложение типичных настройки переключения извещателя при стандартном восьмифазном пересечении с защищенными разрешенные операции на всех подходах. Фаза продления фазы Фаза переключения (с пяти- Сигнальная головка Secon защищена — PermiÂed Operaons) Фаза переключения (с FYA Защищено-разрешено Оперы) 1 1 6 2 3 3 8 4 5 5 2 6 7 7 4 8 6.3 РАБОЧИХ ПЛАНА Большинство контроллеров позволяют значениям параметров синхронизации сигнала изменяться в зависимости от времени дня, недели и т. Д. или год. График для этих изменений временного плана называется временем дня. план. Он предоставляет контроллеру информацию о том, какой набор времени сигнала параметры следует использовать в зависимости от установленного расписания. Планы на время суток должны разрабатываться специально ic и могут быть использованы, чтобы помочь агентству в достижении своих целей в разные периоды времени. Определение времени движения Обычно меняющиеся условия могут помочь практикующему врачу принять решение сколько требуется временных планов.Большинство перекрестков переживают пиковый период утром и вечером, поэтому утренние и вечерние пики могут иметь разные планы времени (с другими значениями времени сигнала), чем остальная часть дня. Например, максимум зеленого на фазе 2 в будний день можно запрограммировать на 20 секунд. большую часть дня и 30 секунд в пиковые периоды. В дополнение к изменениям расписания в течение дня, могут быть предусмотрены отдельные планы. Гарантия на будни, выходные или даже в определенные ic дней (например, пятница в праздничный день выходные) в зависимости от характера и объемов поездок.Например, туристические районы которые испытывают большой колебания в движении IC низкий в течение года май посмотри на это бене рекомендуется разработать временные планы для туристических и нетуристических сезонов. В практикующему специалисту необходимо будет проверить, какие параметры могут быть изменены в зависимости от времени суток в контроллер, но следует учитывать другие значения при выборе времени сигнала параметры, описанные в этой главе. Образец 6-26 Типичный Параметры для детектора Переключение под Охраняемый-Разрешенный Операоны
Руководство по синхронизации сигналов, второе издание 6-28 Глава 6.Intersecon / несогласованное время 6.4 ССЫЛКИ 1. Единый кодекс транспортных средств, издание Millennium. Национальный комитет по единому движению транспорта Законы и постановления, Александрия, Вирджиния, 2000 г. 2. Руководство по единообразным устройствам управления движением на улицах и автомагистралях, издание 2009 года. Министерство транспорта США, Федеральное управление шоссейных дорог, Вашингтон, округ Колумбия, 2009. 3. Определение интервалов изменения сигнала автомобиля и клиренса. Институт Транспортные инженеры, Вашингтон, округ Колумбия, 1994. 4. Справочник по дорожному движению, 6-е издание.Институт инженеров транспорта, Вашингтон, округ Колумбия, 2009. 5. Справочник по устройствам управления дорожным движением. Институт инженеров транспорта, Вашингтон, округ Колумбия, 2001. 6. Макги старший, Х., К. Мориарти, К. Эклс, М. Лю, Т. Гейтс и Р. Реттинг. Отчет NCHRP 731: Рекомендации по выбору интервалов между желтым и полностью красным на сигнальных перекрестках. Совет по исследованиям транспорта Национальной академии, Вашингтон, округ Колумбия, 2012 г. 7. Тарнофф, П. Дж. Интервалы очистки сигналов дорожного движения. В журнале ITE, Институт Транспортные инженеры, Вашингтон, Д.С., 2004, стр. 20–24. 8. Сулейрет, Р. Р., М. М. О’Брайен, Т. Макдональд, Х. Престон и Р. Сторм. Эффективность Абсолютно красных очистных интервалов при авариях на перекрестках. Отчет MN / RC-2004-26, Министерство транспорта Миннесоты, 2004 г. 9. Калифорнийское руководство по унифицированным устройствам управления трафиком, издание 2012 года. Калифорния Департамент транспорта, Сакраменто, Калифорния, 2012 г. 10. Боннесон, Дж. А., и М. Аббас. Руководство по обнаружению перекрестков. Отчет FHWA / TX-03 / 4285-2, Департамент транспорта Техаса, Остин, Техас, 2002.11. Боннесон, Дж. А., и П. Т. Маккой. Руководство по проектированию детекторов трафика, 2-е издание. Институт инженеров транспорта, Вашингтон, округ Колумбия, 2005 г.
Распространение морского дна | Национальное географическое общество
Расширение морского дна происходит по расходящимся границам плит. По мере того как тектонические плиты медленно удаляются друг от друга, тепло конвективных потоков мантии делает кору более пластичной и менее плотной. Менее плотный материал поднимается вверх, часто образуя гору или возвышенность на морском дне. В конце концов корка трескается. Горячая магма, подпитываемая мантийными конвекционными пузырьками, заполняет эти трещины и разливается на кору. Эта пузырящаяся магма охлаждается холодной морской водой, образуя вулканическую породу. Эта порода (базальт) становится новой частью земной коры.Срединно-океанические хребты
Распространение морского дна происходит вдоль срединно-океанических хребтов — больших горных хребтов, поднимающихся со дна океана. Например, Срединно-Атлантический хребет отделяет Североамериканскую плиту от Евразийской плиты и Южноамериканскую плиту от Африканской плиты.Восточно-Тихоокеанский подъем — это срединно-океанический хребет, который проходит через восточную часть Тихого океана и отделяет Тихоокеанскую плиту от Северо-Американской плиты, плиты Кокос, плиты Наска и Антарктической плиты. Юго-Восточный Индийский хребет отмечает место, где южная Индо-Австралийская плита образует расходящуюся границу с Антарктической плитой. Распространение морского дна не является постоянным на всех срединно-океанических хребтах. Медленно расширяющиеся хребты — это участки высоких узких подводных скал и гор.Быстро распространяющиеся гряды имеют гораздо более пологие склоны. Например, Срединно-Атлантический хребет — это медленно растущий центр. Он распространяется на 2-5 сантиметров (0,8-2 дюйма) каждый год и образует океанский желоб размером с Большой каньон. С другой стороны, Восточно-Тихоокеанское поднятие — быстрорастущий центр. Каждый год он разрастается на 6-16 сантиметров (3-6 дюймов). На Восточно-Тихоокеанском поднятии нет океанической впадины, потому что морское дно расширяется слишком быстро, чтобы оно могло развиваться!Новейшая и тончайшая кора на Земле расположена недалеко от центра срединно-океанического хребта — фактического места распространения морского дна.Возраст, плотность и мощность океанической коры увеличиваются по мере удаления от срединно-океанического хребта.
Геомагнитные инверсии
Магнетизм срединно-океанических хребтов помог ученым впервые определить процесс расширения морского дна в начале 20 века. Базальт, когда-то расплавленная порода, которая составляет большую часть новой океанической коры, является довольно магнитным веществом, и ученые начали использовать магнитометры для измерения магнетизма дна океана в 1950-х годах.Они обнаружили, что магнетизм дна океана вокруг срединно-океанических хребтов был разделен на соответствующие «полосы» по обе стороны от хребта. Удельный магнетизм базальтовой породы определяется магнитным полем Земли, когда магма остывает. Ученые определили, что этот же процесс сформировал идеально симметричные полосы по обе стороны срединно-океанического хребта. Непрерывный процесс распространения морского дна разделял полосы в упорядоченном порядке.Географические объекты
Океаническая кора медленно удаляется от срединно-океанических хребтов и участков спрединга морского дна.По мере движения он становится холоднее, плотнее и толще. В конце концов, более древняя океаническая кора сталкивается с тектонической границей с континентальной корой. В некоторых случаях океаническая кора встречает активную окраину плиты. Активный край плиты — это фактическая граница плиты, где океаническая кора и континентальная кора сталкиваются друг с другом. Активные окраины плит часто являются местом землетрясений и извержений вулканов. Океаническая кора, образованная морским дном, распространяющимся в Восточно-Тихоокеанском поднятии, например, может стать частью Огненного кольца, подковообразного узора вулканов и зон землетрясений вокруг бассейна Тихого океана. В других случаях океаническая кора встречает пассивный край плиты. Пассивные окраины — это не границы плит, а области, где единственная тектоническая плита переходит из океанической литосферы в континентальную литосферу. Пассивные окраины не являются участками разломов или зон субдукции. Толстые слои наносов покрывают переходную кору пассивной окраины. Океаническая кора Срединно-Атлантического хребта, например, станет частью пассивной окраины Североамериканской плиты (на восточном побережье Северной Америки) или Евразийской плиты (на западном побережье Европы). Новые географические объекты могут быть созданы за счет расширения морского дна. Красное море, например, было создано, когда африканская плита и арабская плита оторвались друг от друга. Сегодня только Синайский полуостров соединяет Ближний Восток (Азию) с Северной Африкой. В конце концов, по прогнозам геологов, расширение морского дна полностью разделит два континента и соединится с Красным и Средиземным морями. Срединно-океанические хребты и распространение морского дна также могут влиять на уровень моря.По мере того, как океаническая кора удаляется от неглубоких срединно-океанических хребтов, она охлаждается и опускается, становясь более плотной. Это увеличивает объем океанического бассейна и понижает уровень моря. Например, система срединно-океанических хребтов в Панталассе — древнем океане, окружавшем суперконтинент Пангею — способствовала мелководью океанов и повышению уровня моря в палеозойскую эру. Панталасса была ранней формой Тихого океана, который сегодня испытывает меньшее распространение по морскому дну и имеет гораздо менее обширную систему срединно-океанических хребтов.Это помогает объяснить, почему уровень моря резко упал за последние 80 миллионов лет. Распространение морского дна опровергает раннюю часть теории дрейфа континентов. Сторонники дрейфа континентов первоначально предполагали, что континенты перемещаются (дрейфуют) через неподвижные океаны. Расширение морского дна доказывает, что сам океан является местом тектонической активности.Сохранение формы Земли
Расширение морского дна — лишь одна часть тектоники плит.Субдукция — другое. Субдукция происходит, когда тектонические плиты врезаются друг в друга, а не расходятся. В зонах субдукции край более плотной плиты погружается или скользит под менее плотную. Затем более плотный литосферный материал снова растворяется в мантии Земли. Расширение морского дна создает новую корку. Субдукция разрушает старую кору. Эти две силы примерно уравновешивают друг друга, поэтому форма и диаметр Земли остаются постоянными.News Flash • Скенектади, Нью-Йорк • CivicEngage
Опубликовано: 24 сентября 2018 г.Вызов процветающих районов
Schenectady’s Thriving Neighborhoods — это новая программа грантов Фонда Скенектади, призванная помочь сделать районы Скенектади сильнее, здоровее, безопаснее, экологичнее и экологичнее.
Дополнительная информация… Городские новости Опубликовано: 29 июня 2018 г.Урок бесплатного безопасного катания на велосипеде в Скенектади
Этим летом, Цикл CDPHP ! предлагает серию бесплатных занятий по безопасному катанию на велосипеде с Нью-Йоркской велосипедной коалицией. Эти классы расскажут, как использовать CDPHP Cycle! , а также базовые навыки велосипедной безопасности. Каждый участник получит в подарок шлем и по …
Читать дальше … Городские новости Размещено: 7 марта 2018 г.Занимайтесь здоровьем
Программа расширения возможностей пациентов, предназначенная для обучения членов сообщества тому, как получить максимальную отдачу от взаимодействия с поставщиками медицинских услуг.
Зарегистрируйтесь на http://www.eventkeeper.com/code/events.cfm?curOrg=SCNY&ref=EK&refNote=TaF#3/24/2018
Дополнительная информация… Городские новости Размещено: 13 октября 2017 г.Извещение для жителей
УВЕДОМЛЕНИЕ ДЛЯ ЖИТЕЛЕЙ
УВЕДОМЛЕНИЕ настоящим сообщаем, что информационная сессия по «Предлагаемый проект насосной станции на Норт-Ферри-стрит» состоится в четверг, 19 октября 2017 г., в 17:15 в Ротонде у мэрии, 105 Jay Street, Скенектади, Нью-Йорк.
Paul LaF …
Читать дальше … Городские новости Размещено: 16 августа 2017 г.Служба комиссара Уэйна Беннета
Услуги для комиссара Уэйна Беннета
Пятница, 18 августа, с 4:00 до 20:00 Полицейская академия штата, расположенная по адресу 1220 Washington Avenue, Building 24, Albany
и в субботу, 19 августа в 10:00 по улице St Церковь Марии на Капитолийском холме, расположенная по адресу 10 Lo …
Читать дальше … Городские новости Размещено: 16 августа 2017 г.Служба комиссара Уэйна Беннета
Услуги для комиссара Уэйна Беннета
Пятница, 18 августа с 4:00 до 20:00м. в Государственной полицейской академии, расположенной по адресу 1220 Washington Avenue, Building 24, Albany
, и в субботу, 19 августа, в 10:00 утра в церкви Святой Марии на Капитолийском холме, расположенной по адресу 10 Lo …
Читать дальше … Городские новости Размещено: 15 марта 2017 г.