Общие сведения и схемы кривошипно-шатунного механизма автомобильных двигателей
Кривошипно-шатунный механизм составляет основу конструкции большинства поршневых двигателей внутреннего сгорания. Назначение кривошипно-шатунного механизма состоит в том, чтобы воспринимать давление газов, возникающее в цилиндре, и преобразовывать прямолинейное возвратно-поступательное движение поршня во вращательное движение коленчатого вала. Эти две функции, выполняемые механизмом, и обеспечивают решение сложной проблемы, связанной с преобразованием тепловой энергии топлива в механическую работу при сжигании топлива в цилиндрах двигателей внутреннего сгорания.
В существующих поршневых двигателях применяются два типа кривошипно-шатунных механизмов: тронковые и крейцкопфные.
В тронковых механизмах шатун шарнирно соединен непосредственно с нижней направляющей (тронковой) частью поршня, тогда как в крейцкопфных механизмах поршень соединяется с шатуном через шток и крейцкопф, которые служат для поршня направляющей частью.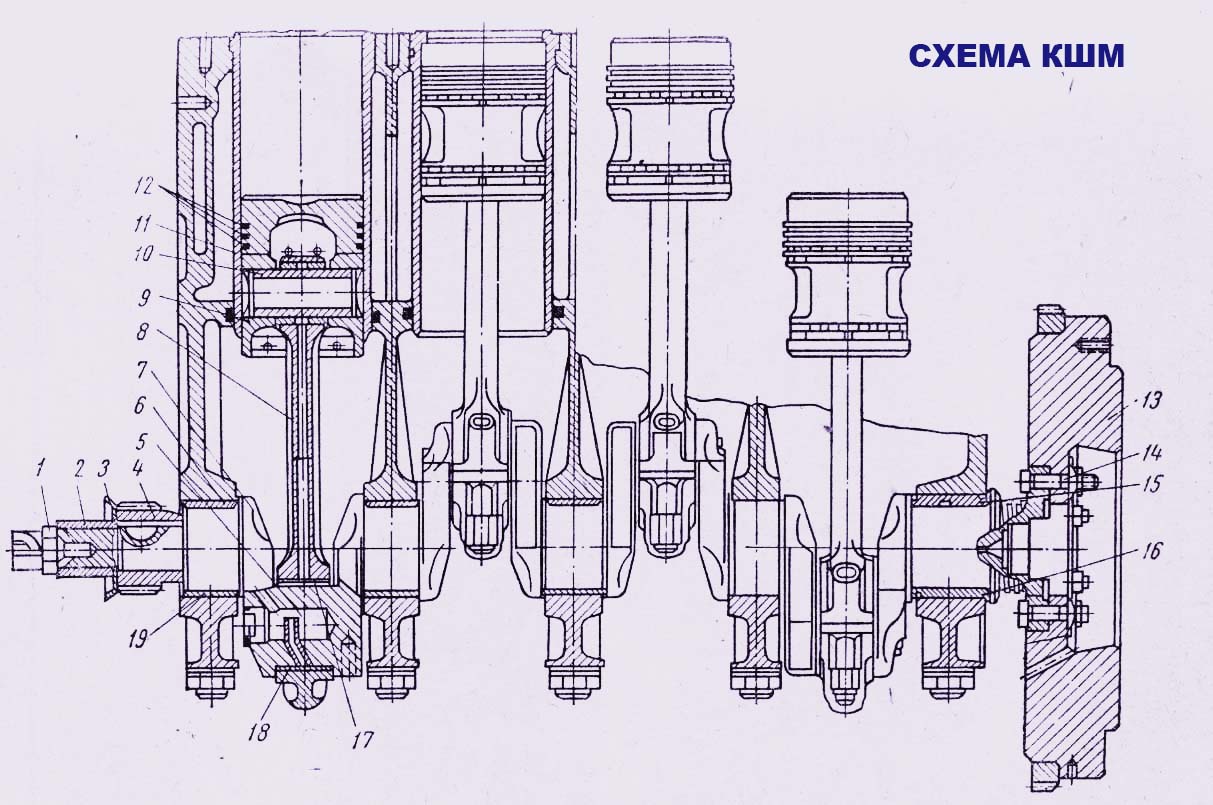
В быстроходных поршневых двигателях автомобильного и тракторного типов применяются более простые и компактные тронковые кривошипно-шатунные механизмы. Благодаря этим преимуществам тронковые механизмы в настоящее время широко применяются и в двигателях стационарного типа. Однако для двигателей двойного действия крейцкопфные механизмы остаются единственно возможными. Такие двигатели обычно строят двухтактными, позволяющими более чем в 3 раза увеличивать мощность силовых установок по сравнению с аналогичными установками, снабженными четырехтактными двигателями простого действия
Кривошипно-шатунный механизм тронковых двигателей состоит из неподвижных и подвижных деталей. К неподвижным относятся: цилиндр, крышка (головка) цилиндра и картер, образующие остов двигателя; подвижную группу составляют: поршневой комплект (поршень с поршневым пальцем и уплотняющими кольцами), шатун, коленчатый вал и маховик.
Иногда к кривошипно-шатунному механизму относят только группу перечисленных подвижных деталей, что нельзя признать правильным, тем более по отношению к двигателям внутреннего сгорания. Во-первых, это не согласуется с самим определением механизма, немыслимого без наличия направляющего звена — стойки. Во-вторых, кроме того что стенки цилиндра служат направляющими для поршня, цилиндр и его головка образуют замкнутую надпоршневую полость, без которой в двигателях внутреннего сгорания нельзя создать нужного давления газов над поршнем, которое он воспринимает и передает на коленчатый вал. Следовательно, отдельно от надпоршневой полости кривошипно-шатунный механизм поршневого двигателя не выполнял бы одну из основных своих функций.
Наиболее распространенные схемы компоновки кривошипно-шатупного механизма автомобильных двигателей приведены ниже.
Двигатели, построенные по схемам А, Б и В, называются однорядными. Чаще всего из них применяется схема А с вертикальным расположением цилиндров. В двигателях, предназначенных для автобусов, с успехом применяется схема В с горизонтальным расположением цилиндров. Такие двигатели удобно размещаются под полом кузова автобуса.
Чаще всего из них применяется схема А с вертикальным расположением цилиндров. В двигателях, предназначенных для автобусов, с успехом применяется схема В с горизонтальным расположением цилиндров. Такие двигатели удобно размещаются под полом кузова автобуса.
Сравнительно новой является схема Б с наклонным расположением цилиндров (под углом от 20 до 45° к вертикальной оси). Двигатели с такой компоновкой используют для ряда современных легковых автомобилей. При этом имеется возможность более рационально размещать вспомогательное оборудование и впускные трубопроводы.
Двигатели, построенные по схемам Г и Д, называются двухрядными. В настоящее время особенно широко применяется схема Г с V-образным расположением цилиндров. Четырех- и восьмицилиндровые V-образные двигатели по условиям их уравновешенности строят с углом между осями цилиндров равным 90°. Они выгодно отличаются по габаритам и весу от соответствующих однорядных и одинаково успешно используются на легковых автомобилях и на средних и тяжелых грузовиках, нуждающихся в силовых агрегатах повышенной мощности. Двигатели с кривошипным механизмом, выполненным по схеме Д, с углом между осями цилиндров 180° называются оппозитными. Такие двигатели с противолежащим расположением цилиндров применяются довольно редко, так как размещение их и обслуживание на автомобиле менее удобно, чем, например V-образных или однорядных горизонтальных.
Двигатели с кривошипным механизмом, выполненным по схеме Д, с углом между осями цилиндров 180° называются оппозитными. Такие двигатели с противолежащим расположением цилиндров применяются довольно редко, так как размещение их и обслуживание на автомобиле менее удобно, чем, например V-образных или однорядных горизонтальных.
Автомобильные двигатели, как правило, строят многоцилиндровыми. Они обычно имеют 2; 3; 4; 6; 8 и редко 12 или 16 цилиндров. Одноцилиндровые двигатели на автомобилях не применяются и вообще для этой цели не пригодны, так как не могут удовлетворительно работать в качестве автомобильных силовых агрегатов без утяжеленного маховика и сложного уравновешивающего устройства.
В самом деле, в одноцилиндровом, например, четырехтактном двигателе из двух оборотов вала только пол-оборота приходится на активный рабочий ход поршня. В течение остальных полутора оборотов скорость вращения коленчатого вала непрерывно замедляется, поскольку движение его в это время осуществляется за счет запаса кинетической энергии маховика, накапливаемой им в момент ускоренного движения при рабочем ходе поршня, когда последний «взрывом» газов отбрасывается к н. м.т. Следовательно, за время одного рабочего цикла коленчатый вал вращается с разной угловой скоростью, что крайне нежелательно.
м.т. Следовательно, за время одного рабочего цикла коленчатый вал вращается с разной угловой скоростью, что крайне нежелательно.
Выравнивание угловой скорости вращения коленчатого вала в одноцилиндровом двигателе возможно только путем повышения уровня аккумулирования кинетической энергии маховика на участке ускоренного движения, т.е. за счет увеличения его инерции. Естественно, при неизменных установившихся оборотах коленчатого вала этого нельзя достигнуть без увеличения массы маховика. Маховик с большей массой будет вращаться равномернее, следовательно, уменьшится и колебание угловой скорости вращения вала. Однако такой путь полностью не избавит вал двигателя от неравномерности вращения. К тому же большая масса маховика требует и больше времени на его разгон до заданной скорости. Вследствие этого ухудшается приемистость двигателя и снижается динамика автомобиля, т.е. уменьшается быстрота раскрутки вала двигателя и разгона автомобиля.
Если предположить, что коленчатый вал вращается равномерно, то и в этом идеальном случае поршень в конце каждого хода меняет направление своего движения.
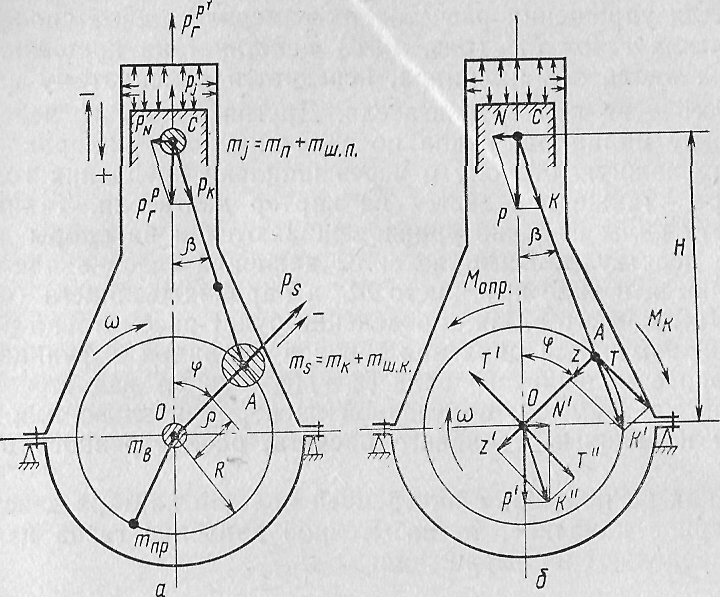
Такое неравномерное движение поршня и связанного с ним комплекта деталей порождает переменные по величине и направлению силы инерции Pj возвратно-движущихся масс, действующие вдоль оси его движения, т. е. по оси цилиндра, как показано на рисунке.
Силы инерции Pj, периодически меняя величину и направление своего действия, если остаются неуравновешенными, вызывают раскачивание двигателя вне зависимости от принятой схемы кривошипно-шатунного механизма (см. рисунок). Возникающая при этом вибрация двигателя передается на его крепления и на раму автомобиля, разрушая его узлы и увеличивая интенсивность их износа. Вследствие вибрации повышаются уровень шума и утомляемость водителя, что увеличивает опасность движения.
Устранить вибрацию, вызываемую силами инерции масс кривошипно-шатунного механизма, совершающих возвратно-поступательное движение, можно только в случае, если удается создать силы, равные по величине и противоположно направленные силам, вызывающим вибрацию. Для этого, как установлено, двигатель должен иметь несколько цилиндров с общим коленчатым валом, допускающим организацию необходимого разнонаправленного движения поршней в отдельных цилиндрах. Это позволяет в известной мере уравновешивать двигатель, т.е. уменьшить воздействие на его остов сил, порождающих вибрацию.
Для этого, как установлено, двигатель должен иметь несколько цилиндров с общим коленчатым валом, допускающим организацию необходимого разнонаправленного движения поршней в отдельных цилиндрах. Это позволяет в известной мере уравновешивать двигатель, т.е. уменьшить воздействие на его остов сил, порождающих вибрацию.
Однако внешне уравновешенные силы инерции нагружают детали двигателя, вызывая изгиб вала, увеличивая нагрузку коренных опор, т. е. создают внутреннюю неуравновешенность двигателя.
В многоцилиндровых двигателях интервал между рабочими ходами, выраженный в градусах угла поворота вала, определяется числом цилиндров i. Для четырехтактных и двухтактных двигателей эти интервалы при равномерном чередовании рабочих ходов соответственно равны 720°/i и 360°/i.
Чем больше число цилиндров, тем меньше интервал между рабочими ходами и вал двигателя вращается равномернее.
Сравнительно хорошую степень уравновешенности и равномерность вращения вала имеет однорядный 6-цилиндровый двигатель. Ею считают полностью уравновешенным. При двухрядном V-образном расположении цилиндров с осями под углом 90° хорошую уравновешенность имеют 8-цилиндровые двигатели. 8-цилиндровые однорядные двигатели считаются уравновешенными, но в настоящее время они утратили практическое значение, так как линейное расположение цилиндров приводит к излишнему удлинению коленчатого вала и снижает его жесткость.
Ею считают полностью уравновешенным. При двухрядном V-образном расположении цилиндров с осями под углом 90° хорошую уравновешенность имеют 8-цилиндровые двигатели. 8-цилиндровые однорядные двигатели считаются уравновешенными, но в настоящее время они утратили практическое значение, так как линейное расположение цилиндров приводит к излишнему удлинению коленчатого вала и снижает его жесткость.
Силы давления газов в надпоршневой полости одинаково действуют как на поршень, так и на головку цилиндра, поэтому, имея всегда равную себе величину и противоположное направление (см. рисунок), эти силы взаимно уравновешиваются внутри системы и не оказывают влияния на вибрацию двигателя, но нагружают коленчатый вал и коренные подшипники. Равнодействующие газовых сил направлены по оси цилиндра, а величина их определяется из соотношения
Рг = pгFп,
где рг— избыточное удельное давление газов, взятое по индикаторной диаграмме, кГ/см2 (Мн/м2)\ Fп — площадь поршня, см2 (м2).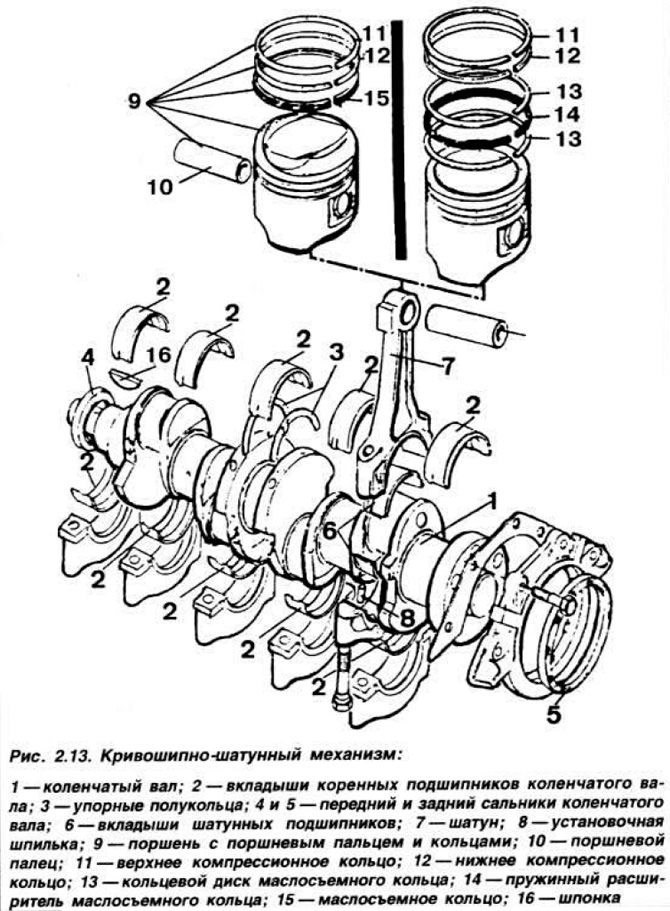
Силы давления газов Р
Если силу Рш, руководствуясь правилами механики, перенести по линии ее действия в центр шатунной шейки и разложить на составляющие, то получим силу Т, перпендикулярную к оси кривошипа, и силу Z, направленную по оси кривошипа (см. рисунок). Сила Т называется тангенциальной. Произведение силы Т на радиус кривошипа г называется крутящим моментом, который определяется по формуле, кГ·м (Мн·м),
Тr = Мкр,
где Мкр определяется путем непосредственного измерения с помощью динамометрического устройства испытательных тормозных установок. Крутящий момент измеряют для ряда чисел оборотов вала двигателя, а затем пересчетом определяют его мощность, развиваемую при этих оборотах вала.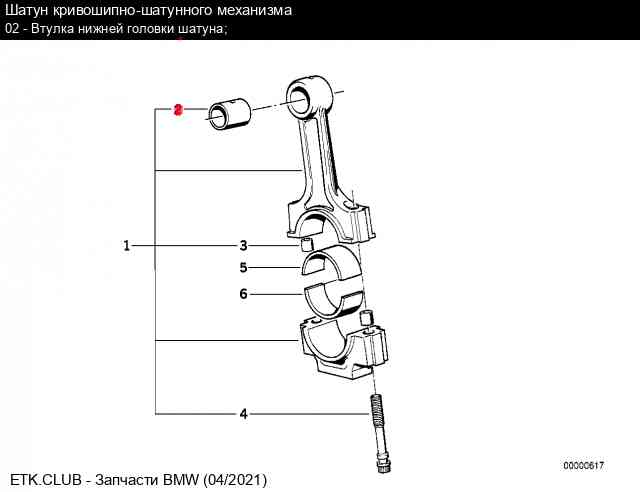 Полученная таким образом закономерность изменения мощности двигателя по числу оборотов вала называется скоростной характеристикой.
Полученная таким образом закономерность изменения мощности двигателя по числу оборотов вала называется скоростной характеристикой.
Источник: Райков И.Я., Рытвинский Г.Н. Двигатели внутреннего сгорания, 1971 г.
Newer news items:
Older news items:
Кривошипно-шатунные Схемы — Энциклопедия по машиностроению XXL
На рис. 1 изображена наглядная схема образования сборочной единицы кривошипно-шатунной группы компрессора. Для ее сборки помимо отдельных деталей (поз. 2—5) подается заранее собранная сборочная един ща (поз. /), представляющая шатун (поз. 6) с запрессованными с даух сторон втулками (поз. 7, 8). Собранная сборочная единица кривошипно-шатунной группы подается далее на сборку всего изделия. На схеме указаны названия и условные позиции составных частей сборочной единицы. [c.6]Построим в масштабе д =2,22 см/мм схему кривошипно-шатунного механизма в заданном положении (рис.
 234).
[c.259]
234).
[c.259]Пример. На рис. 20 изображена схема кривошипно-шатунного механизма. Кривошип ОА вращается вокруг точки О так, что угол поворота BOA равняется шг. Определить закон движения точки М шатуна АВ, если длина кривошипа ОА = г, длина шатуна АВ=1, расстояние AM=d. [c.75]
На рис. 11.11 изображена схема инерционной водоподъемной установки с приводом от ветродвигателя. Ветровое колесо вращает кривошипно-шатунный механизм, который сообщает возвратно-поступательное движение водоподъемной трубе. При движении ее вниз сила инерции воды в трубе направлена вверх. В результате над обратно-приемным шаровым клапаном, расположенным в нижней части трубы, давление понижается, он открывается и вода из колодца поступает в трубу. Из трубы она отводится по гибкому рукаву и трубопроводу в запасной резервуар. [c.126]
Рассмотрим процесс работы двигателя. На рис. 13.2 изображены схема двигателя и график изменения давления внутри цилиндра Б зависимости от перемещения поршня (индикаторная диаграмма). Поршень двигателя совершает возвратно-поступательные движения и через кривошипно-шатунный механизм вращает вал, который соединен с потребителем механической работы.
[c.128]
Поршень двигателя совершает возвратно-поступательные движения и через кривошипно-шатунный механизм вращает вал, который соединен с потребителем механической работы.
[c.128]
 [c.13]
[c.13]
На рис. 106,6 приведена схема гидромеханического вибратора, который отрабатывает синусоидальный сигнал, задаваемый золотнику 1 кривошипно-шатунным механизмом, включающим эксцентрик [c.190]
| Рис. IX.3. Расчетная схема кривошипно-шатунного механизма |
 Клапан б, расположенный в начале трубопровода 2, открывается, и вакуум распространяется в полую штангу присосов Воздушный поток из камеры 7 направляется под уже приподнятый верхний лист бумаги, вследствие чего лист окончательно отделяется. Затем этот лист транспортируется штангой присосов на транспортер в, которым он и подается в машину.
[c.196]
Клапан б, расположенный в начале трубопровода 2, открывается, и вакуум распространяется в полую штангу присосов Воздушный поток из камеры 7 направляется под уже приподнятый верхний лист бумаги, вследствие чего лист окончательно отделяется. Затем этот лист транспортируется штангой присосов на транспортер в, которым он и подается в машину.
[c.196]При внецентренной схеме кривошипно-шатунного механизма привода стола со скатом (рис. XVI. 18) угол поворота кривошипа, установленного на главном валу, соответствующий рабочему ходу стола, равен [c.345]
Кинематические схемы современных сложных машин и автоматов состоят из многочисленных и разнообразных механизмов кривошипно-шатунных, зубчатых, кулачковых, ременных, цепных, червячных, гидравлических, пневматических, электрических и т. д. Одни из них обеспечивают постоянное соотношение скоростей и передаточных чисел, другие — определенный характер движения (с остановками, без остановок, ускоряющееся, замедляющееся и т. д.), третьи — изменение направления движения, четвертые — получение сложных траекторий движения…
[c.28]
д.), третьи — изменение направления движения, четвертые — получение сложных траекторий движения…
[c.28]
На рис. 3.26 представлена схема авиационного прибора, предназначенного для измерения скорости движения самолета. Этот прибор содержит два упругих элемента манометрическую коробку 1 и спиральную пружинку (волосок) 5. Манометрическая коробка деформируется в зависимости от величины разности давлений извне (Рг) и внутри ее (Pi) в соответствии с этой деформацией перемещается жесткий центр 6, играющий роль ползуна кривошипно-шатунного механизма. Это движение через пространственный рычаг, поворачивающийся около оси X — X, и через зубчатый сектор 3 и шестерню 4 передается на стрелку прибора 7. Волосок 5 [c.109]
Сначала рассмотрим графический прием определения радиуса кривизны применительно к кулачковому механизму с поступательным толкателем. Такой механизм изображен на рис. 394, а. Точка С представляет собой центр кривизны теоретического профиля а Ь кулачка для точки А — положения центра ролика в указанном положении механизма. Расстояние между точками А и С с точностью до величин третьего порядка малости в процессе движения механизма для двух бесконечно близких последовательных положений механизма будет оставаться постоянным, поэтому эти точки могут быть соединены неизменным стержнем АС. Но в этом случае кулачковый механизм превратится в нецентральный кривошипно-шатунный механизм, изображенный на рис. 394, б. В нем длина шатуна I равна р — радиусу кривизны теоретического профиля кулачка схемы (394, а), а длина кривошипа г равна расстоянию АС той же схемы одинаковы у этих механизмов и эксцентриситеты е.
[c.379]
394, а. Точка С представляет собой центр кривизны теоретического профиля а Ь кулачка для точки А — положения центра ролика в указанном положении механизма. Расстояние между точками А и С с точностью до величин третьего порядка малости в процессе движения механизма для двух бесконечно близких последовательных положений механизма будет оставаться постоянным, поэтому эти точки могут быть соединены неизменным стержнем АС. Но в этом случае кулачковый механизм превратится в нецентральный кривошипно-шатунный механизм, изображенный на рис. 394, б. В нем длина шатуна I равна р — радиусу кривизны теоретического профиля кулачка схемы (394, а), а длина кривошипа г равна расстоянию АС той же схемы одинаковы у этих механизмов и эксцентриситеты е.
[c.379]
Перейдем теперь к рассмотрению графического приема определения радиуса кривизны точек профиля кулачка коромысловой схемы, также основанного на использовании заменяющего шарнирного механизма.
 В данном случае таким заменяющим шарнирным механизмом будет не кривошипно-шатунный нецентральный механизм, а четырехзвенный шарнирный.
[c.381]
В данном случае таким заменяющим шарнирным механизмом будет не кривошипно-шатунный нецентральный механизм, а четырехзвенный шарнирный.
[c.381]Принципиальная схема стенда представляет собой центральный кривошипно-шатунный механизм, у которого длина кривошипа равна длине шатуна. Механизм вибростенда конструктивно оформлен в виде планетарного механизма (рис. 16) с неподвижным (/) и подвижным (2) [c.118]
На фиг. 64 дана схема кривошипно-шатунного механизма. Изменение длины хода пальца 2 производится изменением радиуса ведущего кривошипа 1. Скорость вращения кривошипа, обычно. [c.82]
По схеме [34] размерных цепей кривошипно-шатунного механизма двигателя (рис. 13, а, б) можно проверить, достаточен ли для нормальной работы узла зазор К между торцами верхней головки шатуна и бобышек поршня (в двух положениях механизма) при установленных допусках и возможных неточностях шатунной шейки (конусность, непараллельность ее оси главной оси коленчатого вала) и Отверстия нижней головки шатуна. [c.43]
[c.43]Аналогично может быть решена задача о проектировании схемы кривошипно-шатунного механизма по заданному коэфициенту К- Для этого по заданному коэфициенту К определяют угол 0. Далее на оси движения х — х ползуна С отмечают крайние положения С и С» ползуна (фиг. 141). В точке С восстанавливают перпендикуляр С я. При точке С откладывают угол 90°—в. Тогда определится положение точки А — одной из точек окружности, вмещающей углы 6. Проводят через точки С, А к С окружность L и симметричную ей окружность L. Центром вращения [c.44]
Фяг. 1. Схема действия инерционных усилий в кривошипно-шатунном механизме. [c.375]
| Фиг. 11. Схема кривошипно-шатунного механизма тепловоза. |
 Кривошипом механизма навески является навесная рама 2, а шатуном — штоки двух силовых цилиндров 1. Рама 2 шарнирно крепится к специальным кронштейнам, приваренным к рамам тележки гусениц.
[c.254]
Кривошипом механизма навески является навесная рама 2, а шатуном — штоки двух силовых цилиндров 1. Рама 2 шарнирно крепится к специальным кронштейнам, приваренным к рамам тележки гусениц.
[c.254]Механизмы возвратно-поступательного движения резания наиболее часто выполняются по кривошипно-шатунной схеме и применяются в лесопильных рамах [1, 25], станках для производства строганого шпона [16], ножницах для резки шпона [16] и др. Характерным отличием этих механизмов является переменная скорость движения и, как следствие, возникновение в процессе работы значительных инерционных сил. Кроме того, в деревообработке применяются механизмы с равномерным возвратно-поступательньпл движением по направляющим в процессе рабочего и холостого хода (зубчато-реечный привод строгальных станков для производства шпона [16]). [c.763]
На рис. 3.104 показаны схемы двух разновидностей кривошипно-шатунных механизмов. Назначение механизма, показанного на рис. 3. 104, а, —преобразование вращательного движения звена / в возвратно-поступательное движение звена 3 или наоборот (см. рис. 136). Звено /, образуюптее со стойкой 4 вращательную кинематическую пару, называют кривошипом-, звено 3, образующее со
[c.499]
104, а, —преобразование вращательного движения звена / в возвратно-поступательное движение звена 3 или наоборот (см. рис. 136). Звено /, образуюптее со стойкой 4 вращательную кинематическую пару, называют кривошипом-, звено 3, образующее со
[c.499]
| Рис. 68. Схемы обеспечения возвратно-поворотного движения а — кривошипно-шатунный поворотный цилищр б — гидроцилиндр с шатунным поворотным устройством в — гидроцилиндры с цецным поворотом колонки г — двухпоршневой цилиндр с зубчатой рейкой |
Пример 1. На рис. 7.1 приведена схема кривошипно-шатунного механизма. Тонкими линиями показан теоретический механизм, а утолщенными — действи-тельный. Если шатун AiB действительного механизма имеет ошибку -f Д/, то ошибка положения механизма равна Д5. [c.123]
Механизмы поворота классифицируют по различным признакам. По кинематической схеме привода их разделяют на две группы кривошипно-шатунные механизмы, имеющие эчень широкое распространение и многочисленные конструктивные варианты исполнения кулисные механизмы, имеющие ограниченное применение. Все рассмотренные выше конструкции рабочих колес относятся к кривошипно-шатунным.
[c.143]
По кинематической схеме привода их разделяют на две группы кривошипно-шатунные механизмы, имеющие эчень широкое распространение и многочисленные конструктивные варианты исполнения кулисные механизмы, имеющие ограниченное применение. Все рассмотренные выше конструкции рабочих колес относятся к кривошипно-шатунным.
[c.143]
Скелетная схема механизма кривошипно-шатунного типа представлена на рис. V.8, а. Здесь рычаг а, жестко связанный с цапфой лопасти в, при поступательном перемещении крестовины г, с которой он соединен серьгой б, поворачивается на некоторый угол и поворачивает лопасть. Так как крестовина связана со всеми лoпa тя ш, то, перемещаясь под действием силы сервомотора Рсср, она поворачивает все лопасти одновременно на одинаковый угол ф. [c.143]
| Рис. V.8. Скелетная схема кривошипно-шатунного механизма (а) и конструкция восмилопастного рабочего колеса с наклонной серьгой (б) |
 82 приведена принципиальная схема смазки газомотокомпрессора (данная схема смазки аналогична и для карбюраторных двигателей и дизелей). Масло из картера 24 через заборный фильтр 23 поступает в масляный шестеренчатый насос 7. Насос прокачивает масло через масляный холодильник 6 и фильтры грубой очистки 4 в распределительный трубопровод /6, из которого по трубкам 17 оно поступает в коренные подшипники 18. Из коренных подшипников по сверлениям в коленчатом валу масло поступает в мотылевые подшипники 20, оттуда по сверлению в прицепных шатунах 21 к поршневым пальцам 22, а затем в охлаждающие полости 19 поршней силовых цилиндров. Из охлаждающих полостей поршней силовых цилиндров по второму сверлению в прицепных шатунах масло возвращается в мотылевый подшипник, а из него по сверлению в коленчатом валу попадает в первый коренной подшипник и далее по сливным трубкам в сборную трубу. Из сборной трубы масло сливается в поддон двигателя. В процессе работы двигателя масло непрерывно циркулирует. Параллельно со смазкой кривошипно-шатунного механизма и охлаждением поршня масло под давлением подается
[c.
82 приведена принципиальная схема смазки газомотокомпрессора (данная схема смазки аналогична и для карбюраторных двигателей и дизелей). Масло из картера 24 через заборный фильтр 23 поступает в масляный шестеренчатый насос 7. Насос прокачивает масло через масляный холодильник 6 и фильтры грубой очистки 4 в распределительный трубопровод /6, из которого по трубкам 17 оно поступает в коренные подшипники 18. Из коренных подшипников по сверлениям в коленчатом валу масло поступает в мотылевые подшипники 20, оттуда по сверлению в прицепных шатунах 21 к поршневым пальцам 22, а затем в охлаждающие полости 19 поршней силовых цилиндров. Из охлаждающих полостей поршней силовых цилиндров по второму сверлению в прицепных шатунах масло возвращается в мотылевый подшипник, а из него по сверлению в коленчатом валу попадает в первый коренной подшипник и далее по сливным трубкам в сборную трубу. Из сборной трубы масло сливается в поддон двигателя. В процессе работы двигателя масло непрерывно циркулирует. Параллельно со смазкой кривошипно-шатунного механизма и охлаждением поршня масло под давлением подается
[c.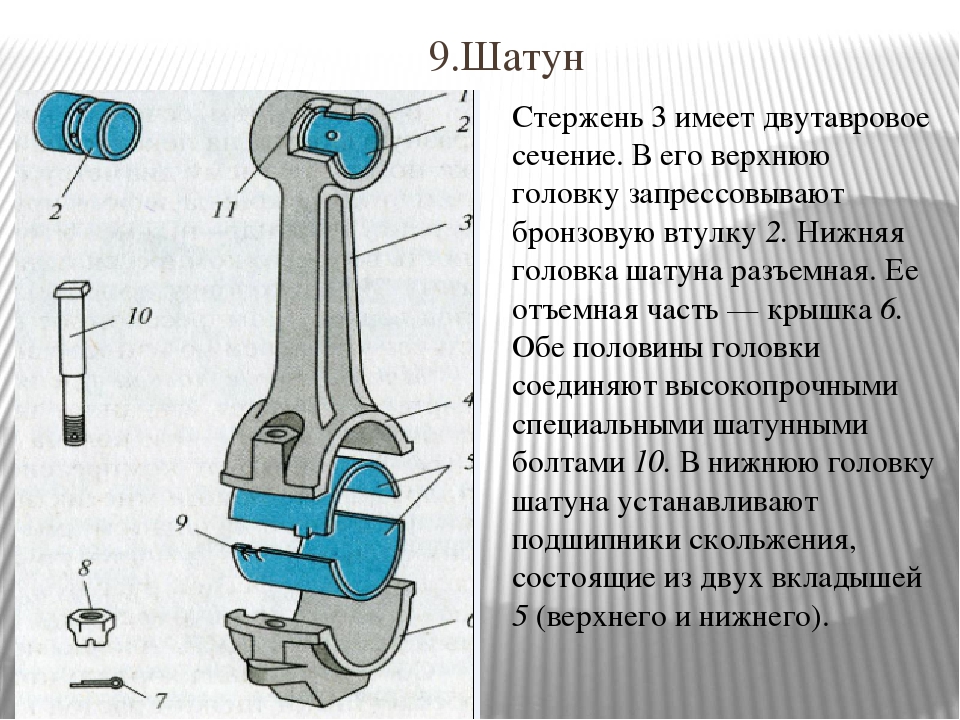 190]
190]Описываемая машина УМ-9 отличается от известных [1—3] тем, что она позволяет проводить испытания на изгиб плоских образцов больших размеров при охлаждении в интервале температур от 20 до минус 100° С, а также металлографические исследования, наблюдение за развитием трещин и измерение электрического сопротивления образца непосредственно в процессе низкотемпературных испытаний. Для экспериментирования используют плоские образцы 250X25X5 мм, имеющие в средней части зону размером 5X8 мм, за счет которой локализуется зона разрушения. Нагружение образца осуществляется от электродвигателя с помощью кривошипно-шатунного механизма. Кинематическая схема машины представлена на рис. 1. [c.39]
Динамика линейной консервативной системы с двумя степенями свободы, возмущенной импульсами. Многие машины ударного действия снабжены ударным механизмом, выполненным по схеме кривошипно-шатунного механизма и нагруженным силой импульсивного характеравблизи мертвого положения. [c.41]
[c.41]
В этих машинах работа механизма нитеводителя связана с программноинформационным управлением. Схема механизма игловодителя представлена на рис. XIV.33, а. На главном валу 1 установлен кривошип 2 кривошипно-шатунного механизма, который приводит к движение игловодитель 3. Игловодитель перемещается в направляющих 4, расположенных в рамке 6, качающейся вокруг оси 5. Качанием рамки управляет механизм, получающий движение от кулачка 7, который и является программоносителем. Для получения разных рисунков строчки применяются сменные кулачки. На рис. XIV.33, б представлены контуры профилей кулачков для различных фигурных строчек, а на рис. XIV.33, б—цикловая диаграмма швейной машины для зигзагообразной строчки. [c.305]
Различные горнзонтальноковочные машины и прессы, в которых сила сопротивления прикладывается к кривошипу в течение сотых долей секунды, когда кривошипно-шатунный механизм находится в мертвом положении, могут быть представлены механической моделью (а) и эквивалентной схемой (6), изображенными на фиг.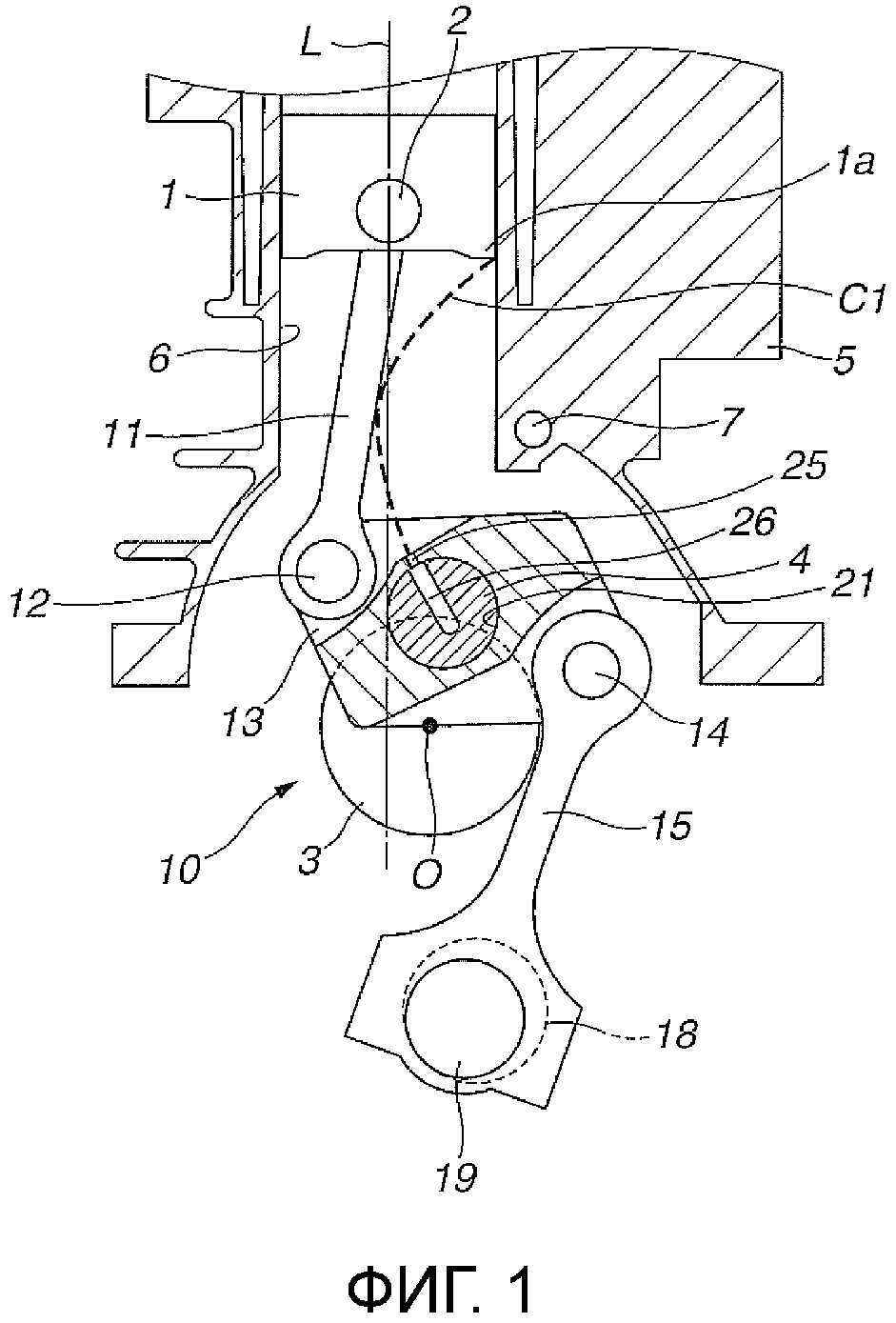 4 [4].
[c.10]
4 [4].
[c.10]
А можно ли сделать такой чривошипно-шатунный механизм, у которого ход ползуна был бы значительно больше, чем удвоенный радИус кривошипа Такие механизмы возможны. На рисунке 12 приведена схема сдвоенного кривошипно-шатунного механизма компрессора, у которого ползуны В и С перемещаются на 2 радиуса каждый. В конечном счете, общее относительное смещение ползунов будет равно 4 радиусам. Такие механизмы называют механизмами для [c.31]
Перейдем к установлению условий проворачиваемости для кривошипно-шатунного механизма. В производственных машинах с целью получить нерабочий ход менее продолжительный, чем рабочий (см. подробнее п. 9), этот механизм применяется в виде нецентральной схемы (рис. 130) с линией движения ползуна, смещенной относительно оси вращения кривошипа на величину так называемого дезаксиала, или эксцентриситета е. [c.84]
Общий вид подналадчика показан на рис. 6, а принципиальная схема — на рис. 7. Пруток при выходе из зоны обработки попадает на рольганг подналадчика, приводимый в движение от электродвигателя 13 (рис. 7), и перемещается по нему до упора. В конце хода пруток проходит антенну емкостного датчика 16 наличия прутка, который дает команду на включение электродвигателя 14, перемещающего через кривошипно-шатунный механизм штангу //. При движении штангн вверх (вид А) пруток 8, находящийся на рольганге, снимается с него наклонной плоскостью гребенки, закрепленной на штанге. При движении штанги вниз пруток остается в пазу неподвижной гребенки 12. В этом положении в одном сечении производится измерение диаметра прутка. Поскольку вес прутка весьма незначителен, а базировка его в пазу неподвижной гребенки достаточно точная, принята простая измерительная схема подналадчика с одним неподвижным базовым измерительным наконечником 3 и подвижным наконечником 2, поджимающим в момент измерения пруток к базовому за счет усилия пружины 6.
[c.243]
7. Пруток при выходе из зоны обработки попадает на рольганг подналадчика, приводимый в движение от электродвигателя 13 (рис. 7), и перемещается по нему до упора. В конце хода пруток проходит антенну емкостного датчика 16 наличия прутка, который дает команду на включение электродвигателя 14, перемещающего через кривошипно-шатунный механизм штангу //. При движении штангн вверх (вид А) пруток 8, находящийся на рольганге, снимается с него наклонной плоскостью гребенки, закрепленной на штанге. При движении штанги вниз пруток остается в пазу неподвижной гребенки 12. В этом положении в одном сечении производится измерение диаметра прутка. Поскольку вес прутка весьма незначителен, а базировка его в пазу неподвижной гребенки достаточно точная, принята простая измерительная схема подналадчика с одним неподвижным базовым измерительным наконечником 3 и подвижным наконечником 2, поджимающим в момент измерения пруток к базовому за счет усилия пружины 6.
[c.243]
Кривошипно-шатунные механизмы центральные 9 — 82 Кулачки — Разметка 9 — 109 Кулачковые механизмы 9 — 102 — Выбор оптимального угла давления 9 —103 — Конструктивные схемы 9—107 — Конструкции 9—107 — К. п. д. 9—104 — КЙчление 9 — 108 — Кулачки — Конструкции 9—108 — Кривые 9 — 104 — Производство 9 — 109 — Рабочий ход — Кривые 9—103 — Толкатели — Башмаки 9 — 108 — Регулировка величины хода 9—108 — Холостой ход — Кривые 9 — 103 — Характеристика 9 — 106 Кулачковые механизмы эталонные—К. п. д. 9—105
[c.147]
п. д. 9—104 — КЙчление 9 — 108 — Кулачки — Конструкции 9—108 — Кривые 9 — 104 — Производство 9 — 109 — Рабочий ход — Кривые 9—103 — Толкатели — Башмаки 9 — 108 — Регулировка величины хода 9—108 — Холостой ход — Кривые 9 — 103 — Характеристика 9 — 106 Кулачковые механизмы эталонные—К. п. д. 9—105
[c.147]
Аналогично уравновешиванию четырёхшарнирных механизмов и для кривошипно-шатунного механизма можно подобрать массы звеньев и их центров тяжести так, чтобы главные векторы h образовали фигуру, подобную кривошипно-шатунному механизму. В отличие от ранее рассмотренных схем общий центр тяжести механизма будет в этом механизме не неподвижен, а будет двигаться по прямой, параллельной оси ползуна. Очевидно, что в этом случае в механизме останутся неуравновешенными силы [c.61]
Кривошипно-шатунный механизм. Расчет кривошипно-шатунного механизма.
В кривошипных прессах в качестве главного исполнительного механизма применяется кривошипно-шатунный механизм (КШМ).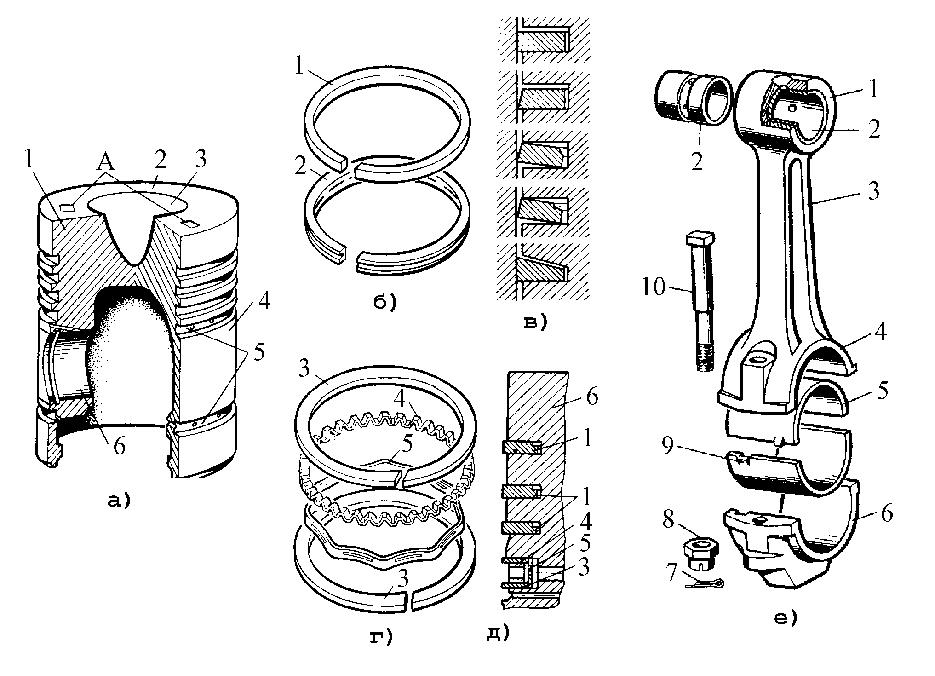 Он относится к четырехзвенным плоским механизмам с одной степенью подвижности. Механизм состоит из ведущего кривошипа и двухповодковой группы – шатун — ползун. КШМ применяется в двух модификациях: в виде аксиального (центрального) и дезаксиального, который, как наиболее общий случай, представлен на рисунке.
Он относится к четырехзвенным плоским механизмам с одной степенью подвижности. Механизм состоит из ведущего кривошипа и двухповодковой группы – шатун — ползун. КШМ применяется в двух модификациях: в виде аксиального (центрального) и дезаксиального, который, как наиболее общий случай, представлен на рисунке.
Кривошипные прессы. Общие сведения.
Кривошипно-шатунный механизм
Исходной величиной при выборе размеров звеньев КШМ является величина полного хода ползуна, заданная стандартом или по техническим соображениям для тех типов машин, у которых максимальная величина хода ползуна не оговаривается (ножницы, автоматы и др.).
КШМ используется также и в ГКМ — Горизонтально-ковочная машина. ГКМ.
На рисунке введены следующие обозначения: dО, dА, dВ – диаметры пальцев в шарнирах; е – величина эксцентриситета; R – радиус кривошипа; L – длина шатуна; ω – угловая скорость вращения главного вала; α – угол недохода кривошипа до КНП; β – угол отклонения шатуна от вертикальной оси; S – величина полного хода ползуна.
По заданной величине хода ползуна S (м) определяется радиус кривошипа:
R = S/2 (м)
Для аксиального кривошипно-шатунного механизма функции перемещения ползуна S, скорости V и ускорения j от угла поворота кривошипного вала α определяются следующими выражениями:
S = R [1 — cosα + (λ/4)(1 — cos2α)], (м)
V = ω R [sinα + (λ/2)(sin2α)], (м/с)
j = ω2 R [cosα + λ cos2α], (м/с2)
Для дезаксиального кривошипно-шатунного механизма функции перемещения ползуна S, скорости V и ускорения j от угла поворота кривошипного вала α соответственно:
S = R [1 — cosα + (λ/4)(1 — cos2α) + k ? sinα + 0,5 (k2 λ2)/(1+ λ)], (м)
V = ω R [sinα + (λ/2)(sin2α) + k λ cosα], (м/с)
j = ω2 R [cosα + λ cos2α — k λ sinα], (м/с2)
где λ – коэффициент шатуна, значение которого для универсальных прессов определяется в пределах 0,08…0,014;
ω– угловая скорость вращения кривошипа, которая оценивается, исходя из числа ходов ползуна в минуту (с-1):
ω = (π n) / 30
У кривошипного пресса номинальное усилие не выражает действительного усилия, развиваемого при помощи привода, а представляет собой предельное по прочности деталей пресса усилие, которое может быть приложено к ползуну. Номинальное усилие соответствует строго определенному углу поворота кривошипного вала. Для кривошипных прессов простого действия с односторонним приводом за номинальное принимается усилие, соответствующее углу поворота α = 15…20о, считая от нижней мертвой точки.
Номинальное усилие соответствует строго определенному углу поворота кривошипного вала. Для кривошипных прессов простого действия с односторонним приводом за номинальное принимается усилие, соответствующее углу поворота α = 15…20о, считая от нижней мертвой точки.
Кривошипно-шатунный механизм / Руководства по эксплуатации, техническому обслуживанию и ремонту. Двигатели КамАЗ 740.11-240, 740.13-260, 740.14-300, 740.30-260, 740.50-360, 740.51-320, 740.50-3901001 КД / Техсправочник / Кама-Автодеталь
КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ
Коленчатый вал (рис. Коленчатый вал) изготовлен из высококачественной стали и имеет пять коренных и четыре шатунные шейки, закаленных ТВЧ, которые связаны между собой щеками и сопрягаются с ними переходными галтелями. Для равномерного чередования рабочих ходов расположение шатунных шеек коленчатого вала выполнено под углом 90°.
К каждой шатунной шейке присоединяются два шатуна: один для правого и один для левого рядов цилиндров (рис. Шатун).
Шатун).
1 — противовес коленчатого вала передний; 2 — противовес коленчатого вала задний; 3 — шестерня привода масляного насоса; 4 — шестерня привода газораспределительного механизма; 5,6- шпонка; 7 -штифт; 8- жиклер; 9 — облегчающие отверстия; 10 — отверстия подвода масла в коренных шейках 11-отверстия подвода масла к шатунным шейкам.
Подвод масла к шатунным шейкам производится от отверстий в коренных шейках 10 прямыми отверстиями 11.
Для уравновешивания сил инерции и уменьшения вибраций коленчатый вал имеет шесть противовесов, отштампованных заодно со щеками коленчатого вала. Кроме основныхпротивовесов, имеются два дополнительных съемных противовеса 1 и 2, напрессованных на вал, при этом их угловое расположение относительно коленчатого вала определяется шпонками 5 и 6 (рис.Коленчатый вал).
В расточку хвостовика коленчатого вала запрессован шариковый подшипник 5 (рис.Установка упорных полуколец и вкладышей подшипников коленчатого вала).
Установка упорных полуколец и вкладышей подшипников коленчатого вала: 1 — полукольцо упорного подшипника коленчатого вала верхнее: 2- полукольцо упорного подшипника коленчатого вала нижнее 3- вкладыш подшипника коленчатого вала верхний; 4- вкладыш подшипника коленчатого вала нижний; 5- блок цилиндров 6 — крышка подшипника коленчатого вала задняя 7 — коленчатый вал.
В полость переднего носка коленчатого вала ввернут жиклер 8,через калиброваное отверстие которого осуществляется смазка шлицево валика отбора мощности на привод гидромуфты.
От осевых перемещений коленчатый вал зафиксирован двумя верхними полукольцами 1 и двумя нижними полукольцами 2 (рис.Установка упорных полуколец и вкладышей подшипников коленчатого вала), установленными в проточках задней коренной опоры блока цилиндров,так,что сторона с канавками прилегает к упорным торцам вала. На переднем и заднем носках коленчатого вала (рис. Коленчатый вал) установлены шестерня 3 привода масляного насоса и ведущая шестерня 4 привода распределительного вала. Задний торец коленчатого вала имеет восемь резьбовых отверстий для болтов крепления маховика, передний носок коленчатого вала имеет восемь отверстий для крепления гасителя крутильных колебаний.
Уплотнение коленчатого вала осуществляется резиновой манжетой 8 (рис. Установка маховика и манжеты уплотнения коленчатого вала), с дополнительным уплотняющим элементом — пыльником 9. Манжета размещена в картере маховика 4. Манжета изготовлена из фторкаучука по технологии формования рабочей уплотняющей кромки непосредственно в прессформе.
Манжета размещена в картере маховика 4. Манжета изготовлена из фторкаучука по технологии формования рабочей уплотняющей кромки непосредственно в прессформе.
Установка маховика и манжеты уплотнения коленчатого вала: 1 — маховик; 2- блок цилиндров; 3- коленчатый вал; 4 — картер маховика; 5- подшипник первичного вала коробки передач; 6- шайба; 7- болт крепления маховика; 8- манжета уплотнения коленчатого вала; 9- пыльник манжеты; 10 — штифт установочный маховика
Диаметры шеек коленчатого ваш: коренных 95+0.011 мм, шатунных 80±0,0095 мм.
Для восстановления двигателя предусмотрены восемь ремонтных размеров вкладышей. Обозначение вкладышей подшипников коленчатого вала, диаметр коренной шейки коленчатого вала, диаметр отверстия в блоке цилиндров под эти вкладыши указаны в приложении 1.
Обозначение вкладышей нижней головки шатуна, диаметр шатунной шейки коленчатого вала, диаметр отверстия в нижней головке шатуна под эти вкладыши указаны в приложении 2.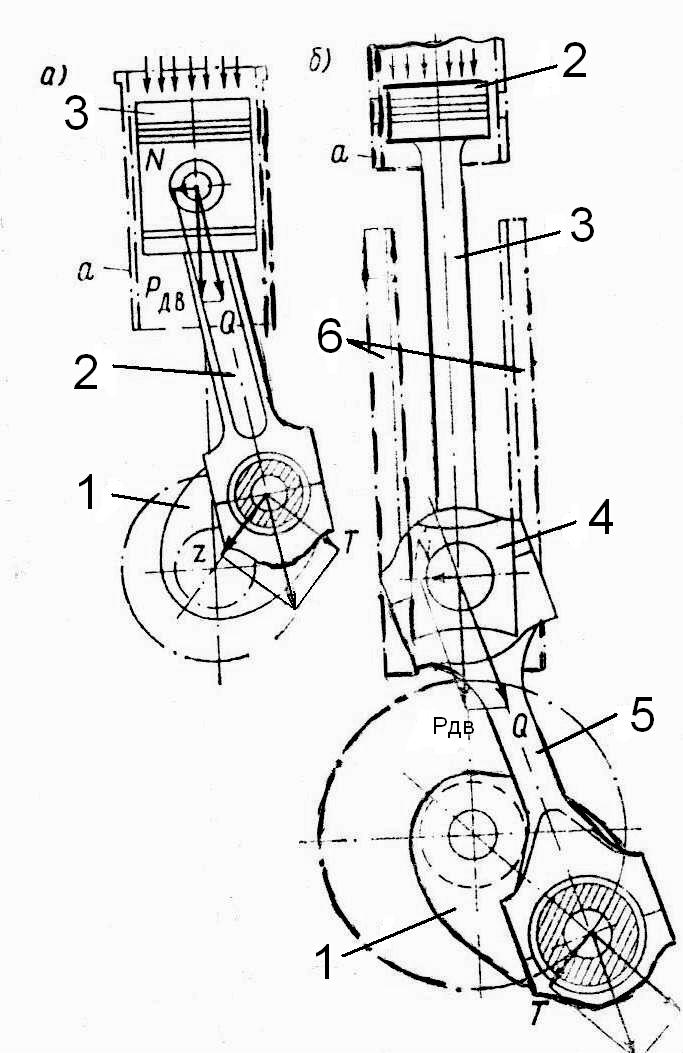
Вкладыши 7405.1005170 Р0, 7405.1005171 Р0, 7405.1005058 Р0 применяются при восстановлении двигателя без шлифовки коленчатого вала. При необходимости шейки коленчатого вала заполировываются. Допуски на диаметры шеек коленчатого вала, отверстий в блоке цилиндров и отверстий в нижней головке шатуна при проведении ремонта двигателя должны быть такими же, как у номинальных размеров новых двигателей.
Коренные и шатунные подшипники изготовлены из стальной ленты, покрытой слоем свинцовистой бронзы толщиной 0.3 мм, слоем свинцовооловянистого сплава толщиной 0.022 мм и слоем олова толщиной 0.003 мм. Верхние 3 (рис.Установка упорных полуколец и вкладышеи подшипников коленчатого вала) и нижние 4 вкладыши коренных подшипников не взаимозаменяемы. В верхнем вкладыше имеется отверстие для подвода масла и канавка для его распределения. Оба вкладыша 4 нижней головки шатуна взаимозаменямы. От проворачивания и бокового смещения вкладыши фиксируются выступами (усами), входящими в пазы, предусмотренные в постелях блока, крышках подшипников и в постелях шатуна. Вкладыши имеют конструктивные отличия, направленные на повышение их работоспособности при форсировке двигателя турбонаддувом, при этом изменена маркировка вкладышей на 7405.1004058 (шатунные), 7405.1005170 и 7405.1005171 (коренные). Поэтому при проведении ремонтного обслуживания не рекомендуется замена вкладышей на серийные с маркировкой 740.100.., так как при этом произойдет существенное сокращение ресурса двигателя.
Вкладыши имеют конструктивные отличия, направленные на повышение их работоспособности при форсировке двигателя турбонаддувом, при этом изменена маркировка вкладышей на 7405.1004058 (шатунные), 7405.1005170 и 7405.1005171 (коренные). Поэтому при проведении ремонтного обслуживания не рекомендуется замена вкладышей на серийные с маркировкой 740.100.., так как при этом произойдет существенное сокращение ресурса двигателя.
Крышки коренных подшипников (рис.Установка крышек подшипников коленчатого вала) изготовлены из высокопрочного чугуна марки ВЧ50. Крепление крышек осуществляется с помощью вертикальных и горизонтальных стяжных болтов 3, 4, 5, которые затягиваются по определенной схеме регламентированным моментом (см. приложение 8).
Шатун (рис.Шатун) стальной, кованый, стержень 1 имеет двутавровое сечение. Верхняя головка шатуна неразъемная, нижняя выполнена с прямым и плоским разъемом. Шатун окончательно обрабатывают в сборе с крышкой 2, поэтому крышки шатунов невзаимозаменяемы. В верхнюю головку шатуна запрессована сталебронзовая втулка 3, а в нижнюю установлены сменные вкладыши 4. Крышка нижней головки шатуна крепится с помощью гаек 6, навернутых на болты 5, предварительно запрессованные в стержень шатуна. Затяжка шатунных болтов осуществляется по схеме, определенной в приложении 8. На крышке и стержне шатуна нанесены метки спаренности — трехзначные порядковые номера. Кроме того на крышке шатуна выбит порядковый номер цилиндра.
В верхнюю головку шатуна запрессована сталебронзовая втулка 3, а в нижнюю установлены сменные вкладыши 4. Крышка нижней головки шатуна крепится с помощью гаек 6, навернутых на болты 5, предварительно запрессованные в стержень шатуна. Затяжка шатунных болтов осуществляется по схеме, определенной в приложении 8. На крышке и стержне шатуна нанесены метки спаренности — трехзначные порядковые номера. Кроме того на крышке шатуна выбит порядковый номер цилиндра.
Маховик1 (рис.Маховик) закреплен восемью болтами 7 (рис.Установка маховика и манжеты уплотнения коленчатого вала), изготовленными из легированной стали с двенадцатигранной головкой, на заднем торце коленчатого вала и точно зафиксирован двумя штифтами 10 и установочной втулкой 3 (рис.Маховик).
С целью исключения повреждения поверхности маховика под головки болтов устанавливается шайба 6 (рис.Установка маховика и манжеты уплотнения коленчатого вала). Величина моментов затяжки болтов крепления маховика указана в приложении 8. На обработанную цилиндрическую поверхность маховика напрессован зубчатый венец 2, с которым входит в зацепление шестерня стартера при пуске двигателя (рис.Маховик ).
На обработанную цилиндрическую поверхность маховика напрессован зубчатый венец 2, с которым входит в зацепление шестерня стартера при пуске двигателя (рис.Маховик ).
При выполнении регулировочных работ по установке угла опережения впрыска топлива и величин тепловых зазоров в клапанах маховик фиксируется при помощи фиксатора (рис.Положения ручки фиксатора маховика).
Положения ручки фиксаторамаховика: а)- при эксплуатации, б) — при регулировке,в зацеплении с маховиком
При этом конструкция имеет следующие основные отличия от серийной:
-изменен угол расположения паза под фиксатор на наружной поверхности маховика;
-увеличен диаметр расточки для размещения шайбы под болты крепления маховика.
Рассматриваемые двигатели могут комплектоваться различными типами сцеплений. На рис. Маховик показан маховик для диафрагменного сцепления.
Установка гасителя крутильных колебаний коленчатого вала: 1 — гаситель; 2 — болт крепления гасителя; 3 — полумуфта отбора мощности; 4 — болт крепления полумуфты; 5 — шайба; 6 — коленчатый вал; 7 — блок цилиндров.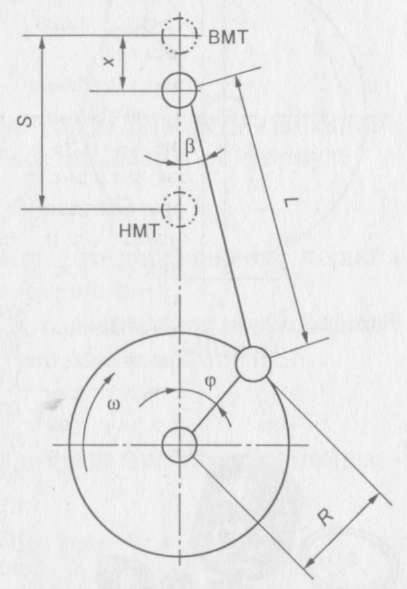
Гаситель крутильных колебании закреплен восемью болтами 2 (рис.Установка гасителя крутильных колебании коленчатого вала) на переднем носке коленчатого вала. С целью исключения повреждения поверхности корпуса гасителя под болты устанавливается шайба 5. Гаситель состоит из корпуса (см. рисунок) в который установлен с зазором маховик. Снаружи корпус гасителя закрыт крышкой. Герметичность обеспечивается закаткой (сваркой) по стыку корпуса гасителя и крышки. Между корпусом гасителя и маховиком находится высоковязкостная силиконовая жидкость, дозированно заправленная перед заваркой крышки. Центровка гасителя осуществляется шайбой, приваренной к корпусу(рис. Гаситель крутильных колебаний коленчатого вала). Гашение крутильных колебаний коленчатого вала происходит путем торможения корпуса гасителя, закрепленного на носке коленчатого вала, относительно маховика в среде силиконовой жидкости. При этом энергия торможения выделяется в виде теплоты. При проведении ремонтных работ категорически запрещается деформировать корпус и крышку гасителя. Гаситель с деформированным корпусом или крышкой к дальнейшей эксплуатации не пригоден.
Гаситель с деформированным корпусом или крышкой к дальнейшей эксплуатации не пригоден.
Поршень 1 (рис.Поршень с кольцами в сборе с шатуном) отлит из алюминиевого сплава со вставкой из износостойкого чугуна под верхнее компрессионное кольцо.
В головке поршня выполнена тороидальная камера сгорания с вытеснителем в центральной части, она смещена относительно оси поршня в сторону от выточек под клапаны на 5 мм.
Боковая поверхность представляет собой сложную овально-бочкообразную форму с занижением в зоне отверстий под поршневой палец. На юбку нанесено графитовое покрытие.
Поршень с шатуном и кольцами в сборе: 1 — поршень; 2 — маслосъемное кольцо; 3 — поршневой палец; 4, 5 — компрессионные кольца; 6 — стопорное кольцо.
В нижней ее части выполнен паз, исключающий при правильной сборке контакт поршня с форсункой охлаждения при нахождении в НМТ.
Поршень комплектуется тремя кольцами, двумя компрессионными и одним маслосъемным. Отличительной его особенностью является уменьшенное расстояние от днища до нижнего торца верхней канавки, которое составляет 17 мм. На двигателях, с целью обеспечения топливной экономичности и экологических показателей, применен селективный подбор поршней для каждого цилиндра по расстоянию от оси поршневого пальца до днища. По указанному параметру поршни разбиты на четыре группы 10, 20, 30 и 40. Каждая последующая группа от предыдущей отличается на 0,11 мм. В запасные части поставляются поршни наибольшей высоты, поэтому во избежание возможного контакта между ними и головками цилиндров в случае замены необходимо контролировать надпоршневой зазор. Если зазор между поршнем и головкой цилиндра после затяжки болтов ее крепления будет менее 0,87 мм необходимо подрезать днище поршня на недостающую до этого значения величину. Поршни двигателей 740.11, 740.13 и 740.14 отличаются друг от друга формой канавок под верхнее компрессионное и маслосъемное кольца, (см. разделы компрессионное и маслосъемное кольца). Установка поршней с двигателей КАМАЗ 740.10 и 7403.10 недопустима. Допускается установка поршней с поршневыми кольцами двигателей 740.
На двигателях, с целью обеспечения топливной экономичности и экологических показателей, применен селективный подбор поршней для каждого цилиндра по расстоянию от оси поршневого пальца до днища. По указанному параметру поршни разбиты на четыре группы 10, 20, 30 и 40. Каждая последующая группа от предыдущей отличается на 0,11 мм. В запасные части поставляются поршни наибольшей высоты, поэтому во избежание возможного контакта между ними и головками цилиндров в случае замены необходимо контролировать надпоршневой зазор. Если зазор между поршнем и головкой цилиндра после затяжки болтов ее крепления будет менее 0,87 мм необходимо подрезать днище поршня на недостающую до этого значения величину. Поршни двигателей 740.11, 740.13 и 740.14 отличаются друг от друга формой канавок под верхнее компрессионное и маслосъемное кольца, (см. разделы компрессионное и маслосъемное кольца). Установка поршней с двигателей КАМАЗ 740.10 и 7403.10 недопустима. Допускается установка поршней с поршневыми кольцами двигателей 740. 13 и 740.14 на двигатель 740.11.
13 и 740.14 на двигатель 740.11.
Компрессионные кольца (рис. Поршень с кольцами в сборе с шатуном) изготавливаются из высокопрочного, а маслосъемное из серого чугунов. На двигателе 740.11 форма поперечного сечения компрессионных колец односторонняя трапеция, при монтаже наклонный торец с отметкой «верх» должен располагаться со стороны днища поршня. На двигателях 740.13 и 740.14 верхнее компрессионное кольцо имеет форму сечения двухсторонней трапеции с выборкой на верхнем торце, который должен располагаться со стороны днища поршня.
Рабочая поверхность верхнего компрессионного кольца 4 покрыта молибденом и имеет бочкообразную форму. На рабочую поверхность второго компрессионного 5 и маслосъемного колец 2 нанесен хром. Ее форма на втором кольце представляет собой конус с уклоном к нижнему торцу, по этому характерному признаку кольцо получило название «минутное». Минутные кольца применены для снижения расхода масла на угар, их установка в верхнюю канавку не допустима.
Маслосъемное кольцо коробчатого типа с пружинным расширителем, имеющим переменный шаг витков и шлифованную наружную поверхность.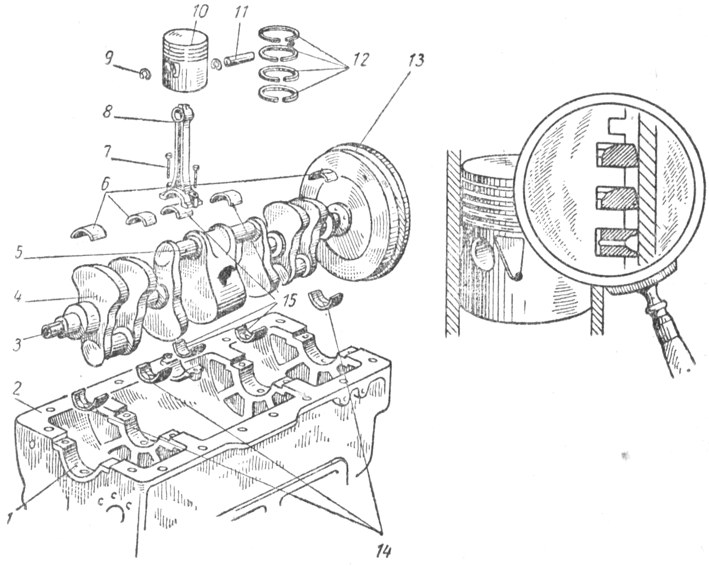 Средняя часть расширителя с меньшим шагом витков при установке на поршень должна располагаться в замке кольца. На двигателе модели 740.11 высота кольца — 5 мм, а на двигателях 740.13 и 740.14 высота кольца — 4 мм.
Средняя часть расширителя с меньшим шагом витков при установке на поршень должна располагаться в замке кольца. На двигателе модели 740.11 высота кольца — 5 мм, а на двигателях 740.13 и 740.14 высота кольца — 4 мм.
Установка поршневых колец с других моделей двигателей КАМАЗ может привести к увеличению расхода масла на угар.
Для исключения возможности применения не взаимозаменяемых деталей цилиндро-поршневой группы при проведении ремонтных работ рекомендуется использовать ремонтные комплекты:
-7405.1000128-42 — для двигателя 740.11-240;
-740.13.1000128 и 740.30-1000128 — для двигателей 740.13-260 и 740.14-300.
В ремонтный комплект входят:
-поршень;
-поршневые кольца;
-поршневой палец;
-стопорные кольца поршневого пальца;
-гильза цилиндра;
-уплотнительные кольца гильзы цилиндра.
Форсунки охлаждения (рис. Установка гильзы и форсунка охлаждения поршня) устанавливаются в картерной части блока цилиндров и обеспечивают подачу масла из главной масляной магистрали при достижении в ней давления 0,8 — 1,2 кг/см2 (на такое давление отрегулирован клапан, расположенный в каждой из форсунок) во внутреннюю полость поршней.
При сборке двигателя необходимо контролировать правильность положения трубки форсунки относительно гильзы цилиндра и поршня. Контакт с поршнем недопустим.
Поршень с шатуном (рис. Поршень с кольцами в сборе с шатуном) соединены пальцем 3 плавающего типа, его осевое перемещение ограничено стопорными кольцами 6. Палец изготовлен из хромоникелевой стали, диаметр отверстия 22 мм. Применение пальцев с отверстием 25 мм недопустимо, так как это нарушает балансировку двигателя.
назначение и устройство, обслуживание и ремонт
Двигатель – пожалуй, самый ответственный агрегат в автомобиле. Именно он вырабатывает крутящий момент для дальнейшего движения машины. В основе конструкции ДВС лежит кривошипно-шатунный механизм. Назначение и устройство его будет рассмотрено в нашей сегодняшней статье.
Конструкция
Итак, что это за элемент в двигателе?
Данный механизм воспринимает энергию давления газов и преобразует его в механическую работу. КШМ двигателя внутреннего сгорания объединяет в себе несколько составляющих, а именно:
- поршень;
- шатун;
- коленчатый вал со вкладышами;
- кольца и втулки.
В совокупности они образуют цилиндро-поршневую группу. Каждая деталь кривошипно-шатунного механизма делает свою работу. При этом элементы взаимосвязаны между собой. Каждая деталь имеет свое устройство и назначение. Кривошипно-шатунный механизм должен выдерживать повышенные ударные и температурные нагрузки. Это обуславливает надежность силового агрегата в целом. Далее мы подробно расскажем о каждой из перечисленных выше составляющей.
Поршень
Данная деталь кривошипно-шатунного механизма воспринимает давление расширяющихся газов после воспламенения горючей смеси в камере. Поршень изготавливается из сплавов алюминия и осуществляет возвратно-поступательные движения в гильзе блока. Конструкция поршня объединяет в себя головку и юбку. Первая может иметь разную форму: вогнутую, плоскую или выпуклую.
На 16-клапанных двигателях ВАЗ зачастую используются поршни с выемками. Они служат для предотвращения столкновения головки поршня с клапанами в случае обрыва ремня ГРМ.
Кольца
Также в конструкции есть кольца:
- маслосъемное;
- компрессионные (две штуки).
Последние препятствуют утечкам газов в картер двигателя. А первые служат для удаления излишков масла, что остается на стенках цилиндра при осуществлении хода поршня. Чтобы поршень соединился с шатуном (о нем мы расскажем ниже), в его конструкции также предусмотрены бобышки.
Шатун
Работа кривошипно-шатунного механизма не обходится без этого элемента. Шатун передает толкательные усилия от поршня на коленвал. Данные детали машин и механизмов имеют шарнирное соединения. Обычно шатуны изготавливаются путем ковки или штамповки. Но на спортивных двигателях используются титановые литые элементы. Они более устойчивы к нагрузкам и не деформируются в случае большого толчка. Каково устройство и назначение кривошипно-шатунного механизма? Конструктивно шатун состоит из трех частей:
- верхней головки;
- стрежня;
- нижней головки.
Вверху данный элемент соединяется с поршнем при помощи пальца. Вращение детали осуществляется в тех самых бобышках. Такой тип пальца называется плавающим. Стержень у шатуна имеет двутавровое сечение. Нижняя часть является разборной. Это нужно для того, чтобы производить его демонтаж с коленчатого вала в случае неисправностей. Нижняя головка соединяется с шейкой коленчатого вала. Устройство последнего мы рассмотрим прямо сейчас.
Коленчатый вал
Данный элемент является основной составляющей в устройстве кривошипно-шатунного механизма. Назначение его в следующем. Коленчатый вал воспринимает нагрузки от шатуна. Далее он преобразует их в крутящий момент, который впоследствии передается на коробку через механизм сцепления. На конце вала закреплен маховик. Именно он является заключительной частью в конструкции двигателя. Может быть одно- и двухмассовым. На конце имеет зубчатый венец. Он нужен для зацепления с шестерней стартера в случае запуска двигателя. Что касается самого вала, он изготавливается из высокопрочных сортов стали и чугуна. Элемент состоит из шатунных и коренных шеек, что соединяются «щеками». Последние вращаются во вкладышах (подшипники скольжения) и могут быть разъемными. Внутри щек и шеек есть отверстия для подачи масла. Смазка проникает под давлением от 1 до 5 Бар, в зависимости от нагруженности ДВС.
Во время работы двигателя может возникать дисбаланс вала. Чтобы его предотвратить, в конструкции предусмотрен гаситель крутильных колебаний. Он являет собой два металлических кольца, что соединяются через упругую среду (моторное масло). На внешнем кольце гасителя имеется ременной шкив.
Типы ЦПГ
На данный момент существует несколько разновидностей цилиндропоршневой группы. Наиболее популярная – рядная конструкция. Она применяется на всех 4-цилиндровых двигателях. Также есть рядные «шестерки» и даже «восьмерки». Данная конструкция предполагает размещение оси цилиндров в одной плоскости. Рядные двигатели отличаются высокой сбалансированностью и малой вибрацией.
Существует также и V–образная конструкция, которая пошла от американцев. Схема кривошипно-шатунного механизма V-8 представлена ниже на фото.
Как видите, здесь цилиндры располагаются в двух плоскостях. Обычно они находятся под углом от 75 до 90 градусов относительно друг друга. Благодаря такой конструкции, можно существенно сэкономить место в подкапотном пространстве. Примером могут послужить 6-цилиндровые моторы от «Опель» С25ХЕ. Этот V-образный двигатель без проблем размещается под капотом поперечно. Если взять рядную «шестерку» от переднеприводного «Вольво», она будет заметно скрадывать место под капотом.
Но за компактность приходится платить меньшей виброустойчивостью. Еще одна схема размещения цилиндров – оппозитная. Практикуется на японских автомобилях «Субару». Оси цилиндров размещены тоже в двух плоскостях. Но в отличие от V-образной конструкции, здесь они находятся под углом 180 градусов. Основные плюсы – низкий центр тяжести и отличная балансировка. Но такие двигатели очень дорогие в производстве.
Ремонт и обслуживание кривошипно-шатунного механизма
Обслуживание любого КШП предполагает лишь регулярную замену масла в двигателе. В случае ремонта уделяется внимание следующим элементам:
- Кольцам поршней. При залегании они меняются на новые.
- Вкладышам коленчатого вала. При существенной выработке или проворачивании подшипника скольжения – замена на новый.
- Поршневым пальцам. Они тоже имеют выработку.
- Самим поршням. При детонации возможен прогар головки, что влечет за собой снижение компрессии, троение, жор масла и прочие неполадки с двигателем.
Зачастую подобные неисправности возникают при несвоевременной замене масла и фильтра, а также при использовании низкооктанового бензина. Также ремонт КШМ может понадобится при постоянных нагрузках и при высоком пробеге. Детали машин и механизмов обычно имеют высокий запас прочности. Но есть случаи, когда вкладыши проворачивало уже на 120 тысячах километров, прогорали клапаны и поршни. Все это является следствием несвоевременного обслуживания силового агрегата.
Итак, мы выяснили, что являет собой кривошипно-шатунный механизм, из каких элементов он состоит.
Автомобиль УАЗ-469 — характеристики, устройство, ремонт
Автомобиль УАЗ-469 — характеристики, устройство, ремонтК сожалению, запрашиваемая вами страница не найдена. Почему?
Вероятные варианты:
Cсылка, по которой вы пришли — невернаНеверно указан путь или название страницы в адресной строке
Страница была удалена или переименована, но ещё существует в индексе поисковиков (закладках браузера)
- Техническая характеристика УАЗ-469, УАЗ-469Б Характерситики двигателя (41416, 414) УАЗ-469, УАЗ-469Б
- Органы управления УАЗ-469
- Подготовка к работе УАЗ-469
- Подвеска двигателя УАЗ-469
- Кривошипно-шатунный механизм двигателя УАЗ-469
- Газораспределительный механизм двигателя УАЗ-469
- Система смазки УАЗ-469
- Система вентиляции картера двигателя УАЗ-469
- Система питания двигателя УАЗ-469 Карбюратор К-129В
- Система выпуска газов двигателя УАЗ-469
- Система охлаждения двигателя УАЗ-469
- Предпусковой подогреватель двигателя УАЗ-469
- Неисправности двигателя УАЗ-469
- Сцепление УАЗ-469 Привод управления сцеплением УАЗ-469
- Коробка передач УАЗ-469 Неисправности коробки передач, механизма переключения УАЗ-469
- Раздаточная коробка УАЗ-469 Возможные неисправности раздаточной коробки УАЗ-469
- Карданная передача УАЗ-469 Неисправности карданного вала УАЗ-469
- Передний ведущий мост УАЗ-469 Техническое обслуживание переднего моста УАЗ-469
- Рама УАЗ-469
- Подвеска УАЗ-469 Амортизатор УАЗ-469
- Рулевое управление УАЗ-469
- Тормоза УАЗ-469 Техническое обслуживание тормозов УАЗ-469
- Электрика УАЗ-469
- Генератор УАЗ-469
- Регулятор напряжения РР132
- Аккумуляторная батарея УАЗ-469
- Система зажигания УАЗ-469 Возможные неисправности приборов системы зажигания УАЗ-469
- Стартер УАЗ-469
- Система освещения, световой и звуковой сигнализации УАЗ-469 Звуковой сигнал УАЗ-469
- Контрольно-измерительные приборы УАЗ-469
- Инструменты и принадлежности УАЗ-469
- Кузов УАЗ-469 Тент УАЗ-469
- Маркировка УАЗ-469
- Техническое обслуживание УАЗ-469
Первое техническое обслуживание (ТО-1) УАЗ-469
Смазка автомобиля УАЗ-469 - Смазочные материалы УАЗ-469 и УАЗ-469Б
Двигатель УАЗ-469, УАЗ-469Б
Трансмиссия УАЗ-469, УАЗ-469Б
Ходовая часть, подвеска, системы управления УАЗ-469, УАЗ-469Б
Электрооборудование УАЗ-469, УАЗ-469Б
Кузов УАЗ-469, УАЗ-469Б
Регулировочные данные УАЗ-469, УАЗ-469Б
Заправочная вместимость УАЗ-469, УАЗ-469Б
Техническое обслуживание системы питания двигателя УАЗ-469
Возможные неисправности сцепления УАЗ-469
Задний мост УАЗ-469
Задний мост УАЗ-469Б
Возможные неисправности заднего моста УАЗ-469Б
Колеса и шины УАЗ-469
Возможные неисправности колес, шин и ступиц УАЗ-469
Возможные неисправности рабочих тормозов УАЗ-469
Стояночный тормоз УАЗ-469
Вентиляция кузова УАЗ-469
Установка санитарных носилок в кузове УАЗ-469
2.2 Кривошипно-шатунный механизм. История появления, механизмы, устройства и принцип работы швейной машины
Похожие главы из других работ:
Виды механизмов и их структурные схемы
2. Кривошипно-ползунный механизм
Этот механизм (рис. 2) служит для преобразования вращательного движения кривошипа в возвратно-поступательное движение ползуна, если начальным звеном является кривошип, и, наоборот, возвратно-поступательного движения во вращательное…
Виды передач и их основные характеристики
Кривошипно-шатунные механизмы
Кривошипно-шатунные механизмы (Рисунок 4) служат для преобразования вращательного движения в возвратно-поступательное и наоборот. Основными деталями кривошипно-шатунного механизма являются: кривошипный вал, шатун и ползун…
История появления, механизмы, устройства и принцип работы швейной машины
2.2 Кривошипно-шатунный механизм
Кривошипно-шатунный механизм (рис.1) — это один из типовых механизмов швейной машины (механизм иглы). Механизм очень распространен в различных машинах. В одних случаях этот механизм получает движение от поршня к валу (в любом поршневом двигателе)…
Кинематический анализ кривошипно-ползунного механизма
1.1 Исходные данные для проведения исследования кривошипно-ползунного механизма
К исходным данным относят: — кинематическая схема кривошипно-ползунного механизма; — размеры звеньев механизма; — частоту и направление вращения ведущего звена; — силу полезного сопротивления; — масса частей механизма. 1…
Обладнання для буріння свердловини
4.1 Визначення зусиль, діючих в елементах кривошипно-шатунного механізму насоса
Зусилля діючі в елементах кривошипно-шатунних механізмів, виникають від сил тиску рідини, сил тертя і сил інерції мас, що обертаються, і мас, які здійснюють зворотно-поступальний рух. Сили інерції враховувати не будемо…
Проект модернізації конструкції шатуну автомобільного двигуна
2.2.4 Кінематика кривошипно-шатунного механізму
Розрахунок кінематики кривошипно-шатунного механізму зводиться до визначення шляху, швидкості та прискорення поршня. При цьому приймається…
Проект модернізації конструкції шатуну автомобільного двигуна
2.2.5 Динаміка кривошипно-шатунного механізму
Динамічний розрахунок кривошипно — шатунного механізму заключається у визначенні сумарних сил та моментів, виникаючих від тиску газів та сил інерції. По цим силам розраховують основні деталі на міцність та знос…
Проект организации технического обслуживания тракторов с разработкой пункта диагностики в условиях ФХ «Сапфир» Хомутовского Курской области
2.9.3 Диагностирование кривошипно-шатунного механизма тракторы Т-150К
Диагностирование проводится при 3 техническом обслуживании. 1. Запускаем двигатель и устанавливаем номинальную частоту вращения коленвала. 2…
Проектирование бензинового двигателя
4.2 Приведение масс частей кривошипно-шатунного механизма
Для упрощения динамического расчета действительный кривошипно-шатунный механизм заменяется динамически эквивалентной системой сосредоточенных масс, состоящей из массы , сосредоточенной в точке А и имеющей возвратно-поступательное движение…
Проектирование бензинового двигателя
4.4 Суммарные силы, действующие в кривошипно-шатунном механизме
Суммарные силы, действующие в кривошипно-шатунном механизме, определяем алгебраическим сложением сил давления газов и сил возвратно-поступательно движущихся масс: (4…
Проектирование часового механизма
4. Стрелочный механизм и механизм завода пружины и перевода стрелок
…
Расчет автотракторного двигателя внутреннего сгорания (прототип СМД-62)
4.2 Динамический расчет кривошипно-шатунного механизма
…
Ремонт деталей поршневых и кривошипно-шатунных механизмов
1. Ремонт деталей поршневых и кривошипно-шатунных механизмов
…
Ремонт деталей поршневых и кривошипно-шатунных механизмов
1. Ремонт деталей поршневых и кривошипно-шатунных механизмов
…
Тракторний дизель потужністю 85 кВт на базі дизеля СМД-17
2.3 Кривошипно-шатунний механізм
Кривошипно-шатунний механізм служить для перетворення прямолінійного зворотно — поступального руху поршня в обертовий рух колінчатого вала. Основними деталями кривошипно-шатунного механізму є поршні з поршневими кільцями й пальцями, шатуни…
Кинематика кривошипно-шатунного механизма — диаграммы скорости и ускорения
В первом руководстве этой серии, посвященном кривошипным механизмам. мы сначала нашли из геометрии выражение для смещения x ползунок как функция угла поворота коленчатого вала θ и отношения n (= L / R), а затем дифференцированные по времени, чтобы получить выражения для скорость и линейное ускорение также как функции θ и n.
Этот анализ дал необходимую информацию для слайдера, но не скорость и ускорение шатуна, движение который представляет собой комбинацию поступательного и вращательного движения.Этот информацию можно получить из диаграмм скорости и ускорения. Мы рассмотрим эти методы в этом руководстве.
В качестве введения мы рассмотрим некоторые общие принципы и техники.
Диаграммы скорости и ускорения
Диаграммы скорости и ускорения построены в масштабе с использованием известных количества и неизвестные значения, затем измеренные прямо с готовых схем. Также возможно получаем неизвестные значения из геометрии диаграмм, и мы принимаем это подход ниже.(В третьем уроке серии мы получаем эквивалентную информацию из векторных уравнений).
Ключевым моментом при построении диаграмм скорости и ускорения является различие между абсолютным и относительных шт. Рассмотреть возможность диаграммы скоростей ниже, которые представляют, скажем, два шарнирных соединения в механизм, обозначенный как a и b . Стрелки v a и v b обозначают направление и величина абсолютных скоростей точек а и b соответственно относительно o , которые обозначает «точку заземления» в общей системе координат.
Для создания диаграмм скоростей v a и v b соединены в их общей контрольной точке o и диаграмма закрыта третьей стрелкой. В (i) стрелка направление представляет собой относительную скорость v b / a означает скорость точки b относительно точки а . В (ii) стрелка v a / b представляет скорость точки a относительно точка б .
Построение диаграммы скоростей аналогично, но не совсем так. то же, что и обычные векторные диаграммы, показанные ниже. В обоих случаях величина и направление результирующих скоростей равны идентичный.
В векторе (i) v a вычитается из вектор v b дающий результирующий вектор в б / у что представляет собой скорость точки b относительно скорость точки a .В (ii) вектор v b вычитается из вектор v a дающий результирующий вектор v a / b что представляет собой скорость точки относительно до скорости точки b .
Диаграммы ускорения построены аналогично диаграммы скоростей с учетом того, что направления скорости и ускорение для точки не обязательно одинаково. Диаграммы ускорения также должны учитывать, что вращательные движение любой точки всегда имеет радиальную составляющую ускорения, направленную в сторону центр вращения и тангенциальный компонент ускорения, когда точка подвержены угловому ускорению. На диаграмме ниже показан диаграмма ускорения шатунной цапфы вращающегося шатуна.
На этой диаграмме точка A вращается вокруг точки O с угловым ускорение α. a Ar — радиальный (центростремительный) ускорение точки A относительно точки O в направлении от A в сторону О.a На — тангенциальное ускорение точка A относительно точки O в результате углового ускорения α. a A — результирующее ускорение точки A относительно точка О. Обратите внимание, что диаграмма представляет собой снимок для удельный угол поворота коленвала и угловая скорость ω, которая постоянно изменяется за счет углового ускорения α.
В этом примере диаграмма ускорения такая же, как вектор диаграмма, поскольку все ускорения относятся к одной точке O.В качестве ниже мы увидим, что это не так для всего кривошипа. механизм.
Плоское движение твердого тела
Когда мы исследуем движение кривошипа и шатуна в кривошипно-шатунный механизм, с которым мы имеем дело, кинематика твердого тела движется в двухмерной плоскости. Подходы классической теории это как комбинация продольного поступательного движения и вращения представлен в пример ниже.
Диаграмма представляет собой моментальный снимок векторов скорости в один момент времени в несколько точки вдоль продольной оси жесткого стержня, движущегося в двух размерная плоскость.В продольная составляющая скорости во всех точках вдоль этого ось должна иметь одинаковую величину, иначе тело будет расширение или сокращение. Если абсолютные скорости при двух точки на оси известны (в этом примере конечные точки A и B), соответствующие поперечные скорости, перпендикулярные линии на точки A и B определяют чистое вращательное движение с центром вращение по продольной оси в точке C *. Этот принцип применим к любому произвольному линия на твердом плоском теле.Выбираем продольную ось здесь просто для удобства.
* Точку C, определенную здесь, нельзя путать с мгновенным центром вращения или полюс скорости описан ниже, хотя как мы увидим, что эти две точки связаны. Я принимаю описание «центр вращения на продольной оси» на основание, что для любого практического примера эта ось явно определенный.
Отметим также, что величина скорости вращения для центр вращения на продольной оси, полученный из этой конструкции, такой же какую бы произвольную линию ни выбрали за продольную ось твердого тела.
Мгновенный центр вращения (полюс скорости)
Это следует из принципа совмещенного поступательного и вращательное движение твердого тела, что будет точка в плоскость движения, где тангенциальная скорость, возникающая при вращении равна и противоположна продольной скорости. Эта точка нулевой скорости должен быть центром вращения для этого момент, когда каждая точка тела находится в чистом вращении вокруг этого точка.Точка называется мгновенным центром вращения или полюс скорости и показан на диаграмме ниже. Примечание что полюс скорости не обязательно лежит на самом теле.
Полюс скорости можно найти двумя способами.
- Ось проходит перпендикулярно продольной оси на тело через центр вращения С. Продольный скорость (синий вектор) постоянна во всех положениях на этом перпендикулярная ось.Касательная скорость, возникающая из вращение тела (красный вектор) также перпендикулярно этому оси, но в противоположном направлении и различается по величине. Дело в эта перпендикулярная ось, на которой продольная и тангенциальная скорости равны равной величины и, таким образом, сокращение — это полюс скорости.
- Если направления абсолютных скоростей двух точек на тела известны, линии, перпендикулярные этим направлениям, могут быть нарисованы из соответствующих точек.Точка пересечения этих перпендикулярных линий является полюс скорости. Это простой и полезный строительство, как мы вскоре увидим. Диаграмма выше ясно показывает, как абсолютная скорость каждой точки на тело (зеленый вектор) касается линии, идущей от скорости полюс, указывая на чистое вращение вокруг полюса скорости при этом мгновенный.
Диаграмма скоростей кривошипно-шатунного механизма
Построим диаграмму скоростей кривошипно-шатунного механизма. ниже, исходя из угла поворота кривошипа θ = 50 °.Угол между соединительный стержень и горизонтальная ось обозначены φ, который мы использовать в последующих расчетах. Смещения в метрах.
Диаграмма скорости состоит из трех компонентов:
- скорость точки A относительно O (земли) обозначена v A / O
- скорость точки B относительно точки A обозначена v B / A
- скорость точки B относительно обозначенной точки O (земли). v B / O
Нам известно следующее:
- Линия действия v A / O перпендикулярна к шатуну с величиной ω x (OA) = (2 π) x (1) = 2 π.РС. В шатун вращается против часовой стрелки, что определяет направление v A / O
- Предполагая, что шатун жесткий, движение точки B относительно точки A должно быть чисто вращательным. Таким образом линия действия v B / A перпендикулярна AB.
- Движение ползунка B ограничено по горизонтали. плоскость, определяющая линию действия v B / O
На диаграмме ниже показаны линии действия этих скоростей.
Теперь построим диаграмму скоростей. Сначала рассчитаем величина v A / O и нарисуйте стрелку для масштабирования вдоль линия действий. Острие стрелки представляет точку A относительно точки O на хвосте. Теперь нарисуйте линию действия v B / A через точку A и линию действия v B / O через точку О. Точка пересечения этих двух прямых определяет величину и направление v B / A и v B / O
Завершенная диаграмма скоростей показана ниже.Обратите внимание, что направления v B / A и v B / O разрешаются в этой конструкции острие стрелки, обозначающей скорость в этой точке относительно точки на хвосте.
Значения, рассчитанные по хорошо составленным скоростным диаграммам, достаточно точен для практических целей. В качестве альтернативы скорости могут рассчитываться непосредственно по диаграмме.
Сначала вычисляем угол φ, упомянутый ранее:
Показать угол φ на диаграмме скоростей с горизонтальной осью и ось шатуна продолжена до пересечения в точке P .
Теперь довольно просто найти стороны AB и BO треугольник ABO, если мы знаем, что AO = v A / O = 2π м / с и угол φ = 14,79 °
Из треугольника AOP угол PAO = 180 ° — (140 ° + 14,79 °) = 25,21 °
Таким образом, в треугольнике ABO угол BAO = (90 ° — 25,21 °) = 64,79 °
и угол ABO = 180 ° — (40 ° + 64,79 °) = 75,21 °
дает BO = v B / O = 5,88 м / с
Это идентичное значение скорости ползунка. для угла поворота кривошипа θ = 50 °, полученного в предыдущем уроке дифференцированием по времени, а именно.
Соответственно рассчитываем v A / B следующим образом:
дает AB = v B / A = 4,18 м / с
Воспользуемся этим результатом, чтобы найти скорость вращения ω AB шатуна длиной 3 м в момент, когда угол поворота коленвала 50 °.
Полюс скорости шатуна
На схеме ниже показано построение мгновенного полюс скорости шатуна в нашем примере механизма, где угол поворота коленвала = 50 °.
Построение диаграммы полюсов скорости очень простой. Сначала стержень AB нарисован в масштабе на правильное угловое положение. В этом случае мы знаем направление скоростей v A / O и v B / O , таким образом, скорость полюс P — это пересечение прямых, перпендикулярных этим направлениям продлен из точек A и B.
Принимая во внимание, что полюс скорости представляет центр чистое вращательное движение стержня скорость вращения стержня ω AB находится путем масштабирования длины AP, которая является радиус поворота для точки А.Сверху мы знаем, что v A / O = 6,28 м / с. Таким образом, ω AB = 6,28 / AP и соответственно путем масштабирования длины BP из графика скорости v B / O = ω AB х БП.
Радиусы от полюса скорости до точек A и B могут быть легко вычисляется, учитывая, что мы уже знаем угол φ на диаграмма и AB = 3 м ..
Использование идентификатора триггера:
, подтверждающее значение ω AB , полученное из диаграмма скоростей в предыдущем разделе.
, подтверждающий значение v B / O , полученное из диаграмма скоростей в предыдущем раздел.
Центр вращения по продольной оси
Находим центр вращения на продольной оси шатун прямо из диаграммы полюса скорости. Одинокий нижние индексы указывают абсолютные скорости в точках стержня.
Линия PD, перпендикулярная AB в точке D, проходит через полюс скорости P — радиус вращения точки D на продольная ось стержня.Таким образом, направление вектора скорости v D должен точно совпадать с продольной осью. Точка D — это мгновенный центр вращения на этой оси и является единственной точкой на оси, не имеющей поперечной составляющей скорости.
Рассчитываем v D со ссылкой на диаграмму как следует.
Из предыдущей диаграммы полюсов скорости: AP = 4,51 м
5,68 м / с — продольная составляющая скорости в каждой точке на оси стержня.Мы можем проверить это в точке B где мы знаем v B = 5,88 м / с по горизонтальной оси.
Диаграмма ускорения кривошипно-шатунного механизма
Диаграмма ускорения для примера механизма имеет компоненты перечислено ниже. Показаны линии действия этих ускорений. на диаграмме выше.
- Точка A имеет центростремительное ускорение, обозначенное как rA / O , действующее радиально вдоль ось кривошипа по направлению к его центру вращения, точка O, который также является опорной точкой для схемы.Поскольку шатун вращается с постоянной угловой скоростью ω нет тангенциальная составляющая ускорения в точке А. В нашем Например, a rA / O = ω 2 (AO) = (2π) 2 (1) = 39,44 м / с 2
- Точка B имеет центростремительное ускорение относительно точки A обозначен как rB / A , действующий радиально вдоль оси шатун в направлении точки A, которая является центром вращения в этом случае. В нашем примере механизм a rB / A = ω 2 AB .(AB) = (1,39) 2 (3) = 5,80 м / с 2
- Мы знаем скорость вращения шатуна ω AB непостоянна и поэтому имеет угловую ускорение α AB Следовательно, точка B имеет тангенциальное ускорение относительно точки A обозначено как tB / A с линией действия, перпендикулярной стержню. Величина и направление на линию действий неизвестно.
- Точка B имеет ускорение относительно точки O обозначен как B / O , действующий горизонтально.Величина и направление действия неизвестны.
Построим диаграмму ускорения, начиная с известные количества.
Сначала нарисуйте A / O от точки O до точки. обозначенный A на своей линии действия с направлением от точки A в точку O, показанную на физической схеме механизма, при θ = 50 ° (см. Выше). Важно отметить, что относительный положения A и O на диаграмме ускорения противоположны позиции на физической схеме.
Затем нарисуйте rB / A на его линии действия из точки A. в точку, обозначенную B /, с указанием направления этого центростремительного ускорения к его центр вращения, который в данном случае находится от точки B до точки A на физическая диаграмма. Зная, что тангенциальное ускорение в точке B относительно точки A также существует, мы обозначим точку как B /, которая может быть считается промежуточной точкой между точками A и B.
Теперь проведите линию действия tB / A через точку B / и линия действия B / O через точку O.В пересечение этих линий определяет точку B. a tB / A нарисован из точки B / в точку B, а B / O нарисовано из точки O в точку B. Завершенное ускорение диаграмма показана ниже.
Значения B / O и tB / A из масштабированной диаграммы являются удовлетворительными для практических целей. Тем не мение. как мы это сделали для диаграммы скоростей. мы можем рассчитать значение B / O из диаграммы и сравните со значением полученный ранее из выражения, полученного при дифференцировании относительно времени в предыдущем руководство.
Расчет немного сложнее, чем для скорости диаграмма. Мы знаем все углы в треугольниках PBO и PB / A и нам известны длины OA и AB /. Затем мы находим сторону AP в треугольнике PB / A, что дает сторону OP = OA + AP в треугольнике PBO, из которого находим сторону OB. Расчет дает B / O = 23,4 м / с 2 , что соответствует полученное ранее значение.
Из этих треугольников мы также вычисляем tB / A = 29.72 м / с 2 . По этой величине определяем угловое ускорение шатуна α BA от отношение a tB / A = AB x α BA где AB = 3 м, что дает α BA = 9,91 рад / с 2
Жду отзывов по адресу:
Глава 5. Планарные рычаги
Yi Zhangс
Susan Finger
Stephannie Behrens
Содержание
5.1 Введение
5.1.1 Что такое механизмы связи?
Вы когда-нибудь задумывались, какой механизм вызывает появление ветрового стекла? стеклоочиститель на передней вдове автомобиля для качания (рис. 5-1а)? Механизм, показанный на рисунке 5-1b, преобразует вращательное движение двигателя в колебательное движение стеклоочистителя.
Рисунок 5-1 Стеклоочиститель
Сделаем простой механизм с похожим поведением. Возьми немного картона и сделайте четыре полоски, как показано на рисунке 5-2а.
Возьмите 4 штифта и соберите их, как показано на рисунке. 5-2b.
Теперь держите 6 дюймов. полоса, чтобы он не мог двигаться и повернуть 3 дюйма полоска. Вы увидите, что 4in. полоска колеблется.
Рисунок 5-2 Самостоятельный четырехзвенный рычажный механизм
Четырехзвенная связь — это самый простой и часто самый полезный механизм. Как мы упоминали ранее, механизм, состоящий из твердых тел и нижние пары называются связкой (Охота 78). В планарных механизмах есть только два вида нижние пары — революционные пары и призматические пары.
Простейшая связь с замкнутым контуром — это четырехзвенная связь, которая имеет четыре стержня, три подвижных звена, одно фиксированное звено и четыре штифта суставы. Связь, имеющая хотя бы одно фиксированное звено, является механизмом. Следующий пример соединения с четырьмя стержнями был создан в SimDesign в simdesign / fourbar.sim
Рисунок 5-3 Четырех стержневой рычажный механизм в SimDesign
Этот механизм имеет три подвижных звена. Две ссылки прикреплены к кадр, который не показан на этом рисунке. В SimDesign ссылки могут быть прибитыми к фону, тем самым превратив их в рамку.
Сколько степеней свободы у этого механизма? Если мы хотим, чтобы у него был только один, мы можем наложить одно ограничение на связь, и он будет иметь определенное движение. Четыре стержня рычага это самый простой и полезный механизм.
Напоминание: механизм состоит из твердых тел и нижних пар. называемые связями (Хант 78). В В планарных механизмах всего два вида нижних пар: поворотные пары и призматические. пары.
5.1.2 Функции рычагов
Функция рычажного механизма состоит в том, чтобы производить вращение, колебание,
или возвратно-поступательное движение от вращения кривошипа или тисков наоборот (Ham et al. 58). Заявленные более конкретно связи могут использоваться для преобразования:
- Непрерывное вращение в непрерывное вращение с постоянным или постоянным вращением. переменное отношение угловой скорости.
- Непрерывное вращение в колебательное или возвратно-поступательное движение (или обратный), с постоянным или переменным соотношением скоростей.
- Колебание в колебание или возвратно-поступательное движение в возвратно-поступательное движение, с постоянным или переменным соотношением скоростей.
Связи выполняют множество различных функций, которые можно классифицировать.
в соответствии с основной задачей механизма:
- Генерация функции : относительное движение между звеньями подключен к раме,
- Создание пути : путь точки трассировки, или
- Генерация движения : движение соединительного звена.
5.2 Четырехзвенный механизм
Один из простейших примеров ограниченной связи — это механизм четырехзвенный . Разнообразные полезные механизмы могут
быть сформированным из четырехзвенного механизма с помощью небольших изменений, таких как
как изменение характера пар, пропорций ссылок, и т. Д. . Кроме того, многие сложные механизмы связи представляют собой комбинации
двух и более таких механизмов. Большинство четырехзвенных механизмов
попадают в один из следующих двух классов:
- четырехзвенный рычажный механизм и
- кривошипно-шатунный механизм.
5.2.1 Примеры
Механизм параллелограмма
В параллелограммной четырехзвенной навеске ориентация муфты не меняется во время движения. На рисунке изображен загрузчик. Очевидно, что поддержание параллелизма важно в погрузчик. Ковш не должен вращаться при подъеме и опускании. Соответствующий файл SimDesign — simdesign / loader.sim.
Рисунок 5-4 Механизм фронтального погрузчика
Кривошипно-шатунный механизм
Механизм с четырьмя стержнями имеет особые конфигурации, созданные создание одной или нескольких ссылок бесконечной длины.Ползунок-кривошип (или кривошипно-ползунковый) механизм, показанный ниже, представляет собой четырехзвенный рычажный механизм с слайдер, заменяющий бесконечно длинную выходную ссылку. Соответствующие Файл SimDesign — simdesign / slider.crank.sim.
Рисунок 5-5 Кривошипно-ползунковый механизм
Эта конфигурация переводит вращательное движение в поступательное. один. Большинство механизмов приводится в движение двигателями, а кривошипы-ползунки часто используется для преобразования вращательного движения в линейное движение.
Кривошипно-поршневой
Вы также можете использовать ползунок в качестве входной ссылки, а рукоятку — в качестве выходная ссылка.В этом случае механизм передает трансляционные движение во вращательное движение. Поршни и кривошип во внутреннем двигатель внутреннего сгорания является примером этого типа механизма. В соответствующий файл SimDesign — simdesign / сжигание.sim.
Рисунок 5-6 Кривошип и поршень
Вы можете спросить, почему слева есть еще один слайдер и ссылка. У этого механизма есть две мертвые точки. Слайдер и ссылка слева помогите механизму преодолеть эти мертвые точки.
Устройство подачи блоков
Одно интересное применение ползунка-кривошипа — это устройство подачи блоков.В Файл SimDesign можно найти в simdesign / block-feeder.sim
.Рисунок 5-7 Устройство подачи блоков
5.2.2 Определения
В ряду планарных механизмов простейшая группа нижней пары механизмы представляют собой четырехзвенные связи. A четырехзвенный рычажный механизм состоит из четырех стержневых звеньев и четырех поворотных пар, как показано на Рисунке 5-8.
Рисунок 5-8 Четырех стержневой рычажный механизм
Ссылка напротив рамки называется соединительное звено , и звенья шарнирно прикреплены к раме называются боковыми звеньями .Ссылка, которую можно свободно перемещать 360 градусов по отношению ко второму звену будет сказано вращает относительно второго звена (не обязательно Рамка). Если возможно, чтобы все четыре бара стали одновременно выровнено, такое состояние называется точкой изменения .
Некоторые важные концепции в механизмах ссылок:
- Кривошип : Боковое звено, которое вращается относительно рамы, назвал кривошип .
- Коромысло : Любое звено, которое не вращается, называется коромыслом .
- Кривошипно-качающийся механизм : в четырехзвенном рычаге, если более короткое боковое звено вращается, а другое качается (, т.е. , колеблется), она называется кривошипно-коромысла .
- Двухкривошипный механизм : в четырехшарнирном рычаге, если оба боковые звенья вращаются, это называется двухкривошипным механизмом .
- Механизм с двумя коромыслами : В четырехзвенной рычажной системе, если обе Боковые звенья рок-н-ролла, он называется двухкамерным механизмом .
5.2.3 Классификация
Перед тем как классифицировать четырехстержневые связи, нам необходимо ввести некоторые основная номенклатура.
В соединении с четырьмя стержнями мы имеем в виду отрезок линии между петли на заданном звене как стержень , где:
- s = длина самого короткого стержня
- l = длина самого длинного стержня
- p, q = длина промежуточного стержня
Теорема Грасгофа утверждает, что четырехзвенный механизм имеет при не менее одно вращающееся звено, если
s + l(5-1)
и все три мобильных ссылки будут качаться, если
s + l> p + q(5-2)
Неравенство 5-1 составляет критерий Грасгофа .
Все механизмы с четырьмя стержнями попадают в одну из четырех категорий, перечисленных в Таблица 5-1:
| Чемодан | л + с исп. р + д | Самый короткий стержень | Тип |
|---|---|---|---|
| 1 | Рама | Двухкривошипная | |
| 2 | Сторона | Коромысло | |
| 3 | Муфта | Двойной рокер | |
| 4 | = | Любая | Изменить точку |
| 5 | > | Любая | Двойной рокер |
Из Таблицы 5-1 видно, что для механизма, имеющего кривошип, сумма длины его самого короткого и самого длинного звеньев должна быть меньше, чем или равна сумме длин двух других ссылок.Тем не мение, это условие необходимо, но недостаточно. Механизмы, удовлетворяющие это состояние делится на следующие три категории:
- Когда самая короткая ссылка — боковая, механизм — кривошипно-качающийся. Кратчайший звено — кривошип в механизме.
- Когда самое короткое звено — это рамка механизм, механизм — двухкривошипный.
- Когда самая короткая ссылка — сцепное звено, механизм — двухклавишный.
5.2.4 Угол передачи
На рисунке 5-11, если AB является входным звеном, сила, приложенная к выходному звену, CD , передается через соединительное звено BC . (То есть нажатие на ссылку CD прикладывает усилие к звену AB , которое передается по ссылке BC .) Для достаточно медленных движений (незначительные силы инерции), сила в соединительном звене чисто растяжение или сжатие (незначительное изгибающее действие) и направлено вдоль г. до н.э. г.Для заданной силы в соединительном звене крутящий момент передаваемый на выходной стержень (около точки D ) максимален при угол между соединительная планка BC и выходная планка CD составляет / 2. Следовательно, угол BCD равен называется угол передачи .
(5–3)
Рисунок 5-11 Угол передачи
Когда угол передачи значительно отклоняется от / 2, крутящий момент на выходном стержне уменьшается и может оказаться недостаточным для преодоления трения в система.По этой причине угол отклонения = | / 2- | не должно быть слишком большим. В На практике нет определенного верхнего предела для, поскольку существование силы инерции могут устранить нежелательные силовые отношения который присутствует в статических условиях. Тем не менее следующие критерию можно следовать.5.2.5 Мертвая точка
Когда боковое звено, такое как AB на Рисунке 5-10, выравнивается с соединительным звеном BC , оно может только сжиматься или удлиняется муфтой.В этой конфигурации крутящий момент, приложенный к звено на другой стороне, CD , не может вызвать вращение звена AB . Поэтому считается, что эта ссылка находится в мертвой точке (иногда называется точкой переключения ).
Рисунок 5-10 Мертвая точка
На рисунке 5-11, если AB — кривошип, он может быть выровнен с BC в полное выдвижение по линии AB 1 C 1 или в сгибание с AB 2 в сложенном состоянии В 2 С 2 .Обозначим угол АЦП через и угол DAB на. Мы используем индекс 1 для обозначают расширенное состояние и 2 для обозначения изогнутого состояния ссылок AB и BC . В расширенном состоянии ссылка CD не может вращать по часовой стрелке, не растягивая и не сжимая теоретически жесткая линия AC 1 . Поэтому ссылку CD нельзя перейти в запретную зону ниже C 1 D , и должен быть на одном из двух крайние позиции; Другими словами, ссылка CD находится в экстремуме.А Второй экстремум звена CD происходит с = 1 .
Обратите внимание, что крайние положения бокового звена возникают одновременно. с мертвыми точками противоположного звена.
В некоторых случаях мертвая точка может быть полезна для таких задач, как работа. крепление (рисунок 5-11).
Изображение 5-11 Рабочее приспособление
В других случаях мертвая точка должна быть преодолена с помощью момент инерции звеньев или при несимметричном развертывании механизм (рисунок 5-12).
Рисунок 5-12 Преодоление мертвой точки асимметричным развертывание (V-образный двигатель)
5.2.6 Ползунок кривошипно-шатунный механизм
Кривошипно-ползунный механизм, широко известный в двигателей, является частным случаем кривошипно-коромысла механизм. Обратите внимание, что если качелька 3 на рис. 5-13а очень длинный, можно заменить блокировкой, скользящей в изогнутую прорезь или направляющую, как показано. Если длина качельки бесконечна, направляющей и колодки больше нет изогнутый. Скорее, они кажутся прямыми, как показано на рис. 5-13b, а связь принимает форму обычный кривошипно-ползунковый механизм .
Рисунок 5-13 Кривошипно-ползунковый механизм
5.2.7 Переворачивание шатунно-ползункового механизма
Инверсия — термин, используемый в кинематике для реверсирования или взаимообмен формы или функции применительно к кинематическим цепям и механизмам. Для Например, взяв другое звено в качестве фиксированного звена, ползунок-кривошип механизм, показанный на рисунке 5-14a, можно перевернуть в механизмы, показанные на рис. 5-14b, c и d. Другой примеры можно найти в применении этих механизмов.Для Например, механизм насосного устройства на рисунке 5-15 такой же, как на рисунке 5-14b.
Изображение 5-14 Инверсии кривошипно-скользящего механизма
Рисунок 5-15 Насосное устройство
Помните, что переворот механизма не меняет движения его звеньев относительно друг друга, но не изменяет их абсолютные движения.
Содержание
- Полное содержание
- 1 Физические принципы
- 2 Механизмы и простые машины
- 3 Подробнее о машинах и механизмах
- 4 Основная кинематика жестких тел с ограничениями
- 5 планарных рычагов
- 5.1. Введение
- 5.1.1 Что такое механизмы связи?
- 5.1.2 Функции рычагов
- 5.2 Четырехзвенные механизмы
- 5.2.1 Примеры
- 5.2.2 Определения
- 5.2.3 Классификация
- 5.2.4 Угол передачи
- 5.2.5 Мертвая точка
- 5.2.6 Ползунок кривошипно-шатунный механизм
- 5.2.7 Переворачивание шатунно-ползункового механизма
- 5.2.2 Определения
- 5.1.1 Что такое механизмы связи?
- 6 кулачков
- 7 передач
- 8 Прочие механизмы
- Индекс
- Ссылки
- 1 Физические принципы
sfinger @ ri.cmu.edu
Принципиальная схема кривошипно-ползункового механизма, иллюстрирующая силы …
Контекст 1
… r — радиус кривошипа, λ = r / L стержень с L-стержнем — длина шатуна (см. Также рисунок 1 ), а θ — угол поворота коленчатого вала. Дифференцируя вышеупомянутое уравнение относительно времени, мы получаем мгновенную скорость поршня …
Контекст 2
… более точное вычисление крутящего момента двигателя (инерции), настоящая исследовательская группа разработала подробный модель шатуна на основе динамики твердого тела (Rakopoulos et al., 2007). Здесь мы анализируем сложное эллиптическое движение центра тяжести стержня (CG), которое создается его возвратно-поступательным и вращательным движением, обеспечивая систему алгебраических уравнений 3 на 3, которую можно решить для неизвестных сил F thr, F 3 и F 4 (рисунок 1). Сила F thr — это инерционная составляющая силы тяги, действующей со стороны поршня на боковую стенку цилиндра. …
Контекст 3
… в результате этой медленной реакции относительное воздушно-топливное соотношение во время ранних циклов переходного процесса принимает очень низкие значения (даже ниже стехиометрических), что ухудшает сгорание и что приводит к медленной реакции двигателя (крутящий момент и скорость), длительному периоду восстановления и выбросу твердых частиц, газов и шума (Rakopoulos and Giakoumis, 2009).На рисунке 10 показано развитие максимальной и средней деформации за каждый цикл двигателя для нагрузки на маховик и для положения между кривошипами 2 и 3 цилиндров для типичного переходного процесса увеличения нагрузки на 10-80%, начиная с частоты вращения двигателя. 1180 об. / мин. Изначально деформация незначительна из-за малой нагрузки двигателя. …
Контекст 4
… деформация незначительна из-за низкой нагрузки двигателя. По мере того как регулятор реагирует на падение частоты вращения двигателя, вызванное резким увеличением нагрузки, заправка также увеличивается (правая часть диаграммы на Рисунке 10), что приводит к более высоким давлениям газа pg (θ) и крутящим моментам на протяжении всего цикла в соответствии с уравнением ( 8).Это приводит к увеличению максимальных и средних деформаций за цикл двигателя (см. Рисунок 6). …
Контекст 5
… оценить важность схемы дифференциального уравнения из 9 частей (уравнение (6)) по сравнению с упрощенным членом из двух частей (уравнение (5)), приведен рисунок 11 . Неудивительно, что аналитическая процедура деформации дает дифференцированные мгновенные и средние значения из-за гораздо более подробной формулировки крутильного поведения коленчатого вала….
Контекст 6
… факт оправдывает решение изучить это динамическое явление на детальной основе ºCA, чтобы иметь возможность в конечном итоге оценить «истинное» максимальное напряжение, которое испытывает каждая часть двигателя во время переходное событие увеличения нагрузки. Результаты переходных процессов расширены на Рисунке 12, показывая «волну» нарастания деформации (кривошипного) вала в течение нескольких циклов одного и того же переходного процесса. Более подробное рассмотрение кривых на Рисунке 12 показывает, что увеличение нагрузки / заправки в конечном итоге приводит также к большим внутрицикловым колебаниям деформации….
Контекст 7
… результаты переходных процессов расширены на Рисунке 12, показывая «волну» нарастания деформации (кривошипного) вала для нескольких циклов одного и того же переходного события. Более подробное рассмотрение кривых на Рисунке 12 показывает, что увеличение нагрузки / заправки в конечном итоге приводит также к большим внутрицикловым колебаниям деформации. Довольно медленное развитие переходного процесса из-за большого момента инерции массы нагрузки двигателя отражается на медленном нарастании деформации во время первых циклов 1-5….
Контекст 8
… предыдущий анализ показал, что, в принципе, основными параметрами, влияющими на профиль и величины крутильных деформаций (коленчатого) вала, являются приложенная нагрузка двигателя и жесткость вала. Влияние нагрузки во время переходных процессов дополнительно демонстрируется на верхней поддиаграмме рисунка 13. Чем выше приложенная нагрузка, тем выше дефицит крутящего момента во время ранних циклов переходного процесса. …
Контекст 9
… Вышеупомянутое явление усиливается, чем жестче сопротивление, подключенное к двигателю (меньшие значения показателя степени в уравнении (10)). Два других интересных параметра исследуются на рисунке 13, а именно график изменения нагрузки переходного события ∆t load и изоляция стенок цилиндра. Как обсуждалось ранее (примечания к рисунку 10), профиль крутильной деформации точно соответствует своему топливному аналогу (не показан), и, по-видимому, на него значительно влияет график нагрузки-времени (нижняя поддиаграмма рисунка 13)….
Контекст 10
… другие интересные параметры исследуются на рисунке 13, а именно график изменения нагрузки переходного события ∆t load и изоляция стенок цилиндра. Как обсуждалось ранее (примечания к рисунку 10), профиль крутильной деформации точно соответствует своему топливному аналогу (не показан), и, по-видимому, на него значительно влияет график нагрузки-времени (нижняя поддиаграмма рисунка 13). Согласно инженерной интуиции, условия конечного равновесия практически одинаковы для всех рассмотренных случаев….
Контекст 11
… другие интересные параметры исследуются на рисунке 13, а именно график изменения нагрузки переходного события ∆t load и изоляция стенок цилиндра. Как обсуждалось ранее (примечания к рисунку 10), профиль крутильной деформации точно соответствует своему топливному аналогу (не показан), и, по-видимому, на него значительно влияет график нагрузки-времени (нижняя поддиаграмма рисунка 13). Согласно инженерной интуиции, условия конечного равновесия практически одинаковы для всех рассмотренных случаев….
Контекст 12
… очень интересный случай с изолированными стенками цилиндра, напоминающий двигатель с низким тепловыделением (LHR), также исследуется на верхней под-диаграмме рисунка 13 для случая, когда цилиндр Стена покрыта 1 мм циркониевым покрытием Plasma Spray Zirconia (PSZ). Целью двигателя LHR является минимизация потерь тепла на стенки цилиндра, устраняя, таким образом, необходимость в системе охлаждения. …
Контекст 13
… Сообщается, что влияние изоляции на переходную характеристику двигателя и турбокомпрессора довольно ограничено, за исключением выбросов NO (Borman and Nishiwaki, 1987; Rakopoulos et al., 2008). Поскольку на крутильную деформацию в основном влияет давление газа, а не температура, двигатель с изолированной стенкой цилиндра PSZ на Рисунке 13 демонстрирует в целом лишь немного более высокие крутильные деформации по сравнению с неизолированной работой. …
Кривошип и ползунок — это лабораторный отчет — ШАТУНКА И СЛАЙДЕРНЫЙ МЕХАНИЗМ Название Цель Для получения
это лабораторный отчет
Текст для предварительного просмотра
ШАТУН И СЛАЙДЕР МЕХАНИЗМ Заголовок Задача Чтобы получить диаграмму перемещения, скорости и ускорения для движения кривошипно-шатунного узла.Постановка задачи В этой лабораторной работе мы исследуем кинематику некоторых простых механизмов. используется для преобразования вращательного движения в колебательное линейное движение и наоборот. Этот настольный прибор демонстрирует преобразование плавного вращательного движения в возвратно-поступательное движение. Входной угол установлен на шарикоподшипнике, установленном поверните диск и считайте показания на шкале измерения угла, встроенной в основание пластина. Радиус кривошипа и длину шатуна можно регулировать, каждый иметь три позиции. Простая вставка болта позволяет поворачивать блокируемый цилиндр, т.е. кривошипно-шатунный привод с фиксированным или колеблющимся цилиндр может быть продемонстрирован.Аппарат Кривошипно-шатунный аппарат. Подключение стержень Кривошип Поршень аппарат Теория Есть три типа плоского движения твердого тела. Перевод: Этот тип движения возникает, когда линия тела остается параллельной его исходная ориентация на протяжении всего движения. Когда пути движения для любого две точки на теле — параллельные линии, движение называется прямолинейным перевод. Если пути движения проходят по изогнутым линиям, которые равноудаленное движение называется криволинейным переносом.Вращение вокруг фиксированной оси: Когда твердое тело вращается вокруг фиксированной оси, все частицы тела, кроме тех, которые лежат на оси вращения, движутся по круговым траекториям. Общее движение плоскости: Когда тело подвергается общему плоскому движению, оно испытывает сочетание перевода и вращения. Перевод происходит в пределах плоскости отсчета, а вращение происходит вокруг оси, перпендикулярной плоскости отсчета. базовая плоскость. Теоретически Смещение поршня определяется выражением Х = г (1 — соз θ) + L (грех 2 θ) / (2n2) Скорость поршня определяется выражением V = ωr [(sin θ + (sin 2 θ) / 2 n)] Где r — радиус кривошипа, L — длина звена, n — отношение звена к радиусу кривошипа.Кривошипный механизм: Кривошипно-ползунковый механизм представляет собой простой четырехзвенный механизм, в котором коромысло заменено на слайдер. Таким образом, четыре звена в кривошипно-скользящем механизме: кривошип, муфта / шатун, Ползунок и ссылка Земля. Ниже показан простой кривошипно-ползунковый механизм: Графики смещения Графики Excel Смещение — График 6 Смещение 5 4 3 2 1 0 0 50 100 150 200 250 угол График программного обеспечения Граф смещения Смещение 300 350 400 Анализ графа смещения Смещение на этом графике похоже на линейное.Поскольку график смещения имеет нулевое значение и старт, но при дальнейшем движении рукоятки оно меняется. Но в верхняя часть графика смещения показывает, что рукоятка максимальна точка. Это похоже на движение поршня. Из этого графика легко понять вся концепция движения поршня. одна точка на этом графике — это то, что мы через минуту смотрите на прогресс всей нашей системы. Итак, этот график объясняет, в чем пропорциональное вращательное движение преобразуется в возвратно-поступательное движение. Описание смещения при вращении кривошипа.Тип перемещения при вращении кривошипа — возвратно-поступательное движение, также называется взаимным. Это повторяющиеся движения вверх-вниз или назад-вперед. линейное движение. Он присутствует в широком спектре механизмов, в том числе поршневые двигатели и насосы. Два противоположных движения, составляющих одиночный цикл возвратно-поступательного движения называется ходом. Кривошип может использоваться для преобразования круговое движение в возвратно-поступательное движение, или наоборот повернуть возвратно-поступательное движение движение в круговое движение. Например, внутри двигателя внутреннего сгорания (тип поршневого двигатель), расширение горящего топлива в цилиндрах периодически выталкивает поршень вниз, который через шатун проворачивает коленчатый вал.Продолжающееся вращение коленчатого вала заставляет поршень снова подниматься, готовый к работе. следующий цикл. Поршень совершает возвратно-поступательное движение, т.е. преобразуется в круговое движение коленчатого вала, что в конечном итоге приводит в движение автомобиль или выполняет другую полезную работу. Вибрация ощущается при включенном двигателе. бег являются побочным эффектом возвратно-поступательного движения поршней, так как кривошип и шатун обычно не закрываются. Возвратно-поступательное движение близко к синусоидальному простому, но отличается от него. гармоническое движение.Точка на распредвале, которая соединяет соединительный стержень плавно вращается с постоянной скоростью по кругу. Таким образом, горизонтальный смещение этой точки действительно точно синусоидальное. Однако во время цикл, угол шатуна изменяется непрерывно. Так что горизонтальное смещение & amp; amp; quot; far & amp; amp; quot; конец шатуна отличается от синусоидальный График программного обеспечения 1.1 Скоростной график 1,2 Вел Анализ графика скорости На этом графике отчетливо видно, что увеличение скорости в некоторой степени, но после некоторого углового смещения скорость увеличивается и достигает максимума при наибольшем значении смещения, но в следующем с просто какое-то смещение оно уменьшится и станет нулевым.это означает, что при изменении происходит смещение, тогда возникает скорость. на графике вы видите, что разница между угловым перемещением и угловой скоростью. Причина этого так Просто скорость создается в направлении смещения. Итак, благодаря этому график скорость очень похожа на смещение. Графики ускорения График Excel График ускорения 0,03 Ускорение 0,02 0,02 0,01 0,01 0 0 50 100 150 200 -0,01 Угол 250 300 350 400 График программного обеспечения График ускорения Ускорение Анализ графика ускорения Четко сказано, что при изменении скорости ускорение это форма.Как вы знаете, ускорение — это скорость изменения скорости во времени. На этом графике мы видим, что при изменении скорости и ее уменьшении возникает производят отрицательное ускорение, которое называется задержка или замедление. Этот график показывает в разных точках, каким образом ускорение изменения. На старте скорость равна нулю, и ускорение также равно нулю, но с интервал некоторой угловой скорости изменяется так, ускорение также изменения. еще важнее то, что этот график находится между углом и Обсуждение Объясните, как работает система кривошипа и ползуна.Этот механизм состоит из трех важных частей. Кривошип, который вращающийся диск, ползунок, скользящий внутри трубки, и соединительный стержень, который соединяет части вместе. Когда ползунок перемещается вправо, шатун толкает колесо на первые 180 градусов колеса вращение. Когда ползунок начинает возвращаться в трубку, соединительный стержень вращает колесо, чтобы завершить вращение Когда ползунок перемещается вправо, шатун толкает колесо по кругу. за первые 180 градусов поворота колеса.Когда ползунок начинает двигаться обратно в трубку, еще один механизм, который очень широко используется в Конструкция машины — кривошипно-шатунный механизм. В основном используется для преобразования вращательное движение к возвратно-поступательному движению или наоборот. Ползунок-кривошип показан механизм и параметры, которые используются для определения углов и длины звеньев даны. Как и в четырехстворчатом механизме, расширенный и сложенная мертвая точка — это когда кривошип и муфта коллинеарный (звено муфты обычно называют шатун в кривошипе ползунка). механизмы).Полное вращение кривошипа возможно, если эксцентриситет c равен меньше, чем разница между длиной шатуна и кривошипа и длина кривошипа меньше длины шатуна. Шатун поворачивает колесо, чтобы завершить вращение. Кривошип — это рычаг, прикрепленный под прямым углом к вращающемуся валу посредством какое возвратно-поступательное движение сообщается валу или принимается от него. это используется для преобразования кругового движения в возвратно-поступательное или наоборот. В рычаг может быть изогнутой частью вала или отдельным рычагом или диском, прикрепленным к Это.К концу кривошипа с помощью стержня прикреплен стержень, обычно называемый шатун. Конец стержня, прикрепленный к кривошипу, перемещается по круговое движение, в то время как другой конец обычно вынужден двигаться в линейное скользящее движение. В этом случае рука или нога человека служит шатун, прикладывая возвратно-поступательное усилие к кривошипу. Обычно бывает штанга перпендикулярна другому концу руки, часто с возможностью свободного вращения прикреплена ручка или педаль. Прокомментируйте или предложите любую причину ошибок Разрешение прибора (случайное) Все инструменты имеют конечную точность, которая ограничивает возможность разрешения небольших различия в измерениях.Один из лучших способов получить более точную измерений заключается в использовании метода нулевой разности вместо измерения количество напрямую. Методы обнуления или баланса включают использование инструментов для измерить разницу между двумя одинаковыми величинами, одна из которых известно очень точно и регулируется. Регулируемое контрольное количество варьировались до тех пор, пока разница не уменьшилась до нуля. Затем две величины сбалансирован, а величина неизвестной величины может быть найдена с помощью сравнение с эталонным образцом.При использовании этого метода проблемы источника нестабильность устранена, а измерительный прибор может быть очень чувствителен и даже не нуждается в шкале Отказ откалибровать (систематический) По возможности следует проверять калибровку прибора. перед взятием данных. Если эталон калибровки недоступен, точность прибор следует проверить путем сравнения с другим прибором это, по крайней мере, так же точно, или ознакомившись с техническими данными, предоставленными производитель. Параллакс (систематический или случайный) Эта ошибка может возникнуть всякий раз, когда есть некоторое расстояние между измерительная шкала и индикатор, который использовался для получения измерения.Если глаз наблюдателя не совмещен с указателем и шкалой прямо, показания может быть слишком высоким или низким. Практическое применение кривошипно-скользящего механизма. Поршневой двигатель Роторный двигатель Лебедка Ручной насос Уравнения движения поршня Солнечная и планетарная передача Ничего болгарка ЗаключениеВиртуальные лаборатории
Динамический анализ механизма кривошипа ползуна
ВВЕДЕНИЕ
Целей обучения:
- Определите все силы, действующие на все звенья кривошипа ползуна.
- Объясните значение параметра и выберите переменную соответственно. Параметр — скорость, ускорение и сила. Переменными являются длина звеньев, масса звеньев, угловая скорость и крутящий момент.
- Рассчитайте скорость, ускорение и силу, действующую на каждое звено.
- Изучите рассчитанные значения с результатами моделирования
- Оцените, как изменение длины, угла и движущей силы приводит к изменению ускорения, скорости и работы, выполняемой механизмом
Теория
Кривошипно-шатунный механизм — одна из самых основных форм механизмов с замкнутым контуром, это модификация базовой четырехзвенной цепи.Он имеет одну степень свободы и часто используется для преобразования вращательного движения в линейное движение путем изменения длины звеньев. Обычно он находится в поршневом механизме парового двигателя. С точки зрения приложения очень важно понимать динамику такой системы. Кинематика системы во многом определяется длиной звена, как и динамика системы. [1]
В процессе моделирования можно понять, как рассчитать силы на каждом звене для постоянной угловой скорости в качестве входных данных.Динамический анализ кривошипно-шатунного механизма ползуна рассматривается после понимания кинематического анализа, поскольку ускорение звеньев требуется для расчета сил, действующих на звено. [1]
Уравнения / формулы:
Кривошипно-шатунный механизм ползуна показан на рис. (А). Пусть P — сила, действующая на поршень, вызванная давлением газа, и известна угловая скорость звена 2. Точки ,, и являются центрами масс звеньев 2, 3 и 4. Нам интересно найти крутящий момент, который кривошип 2 оказывает на коленчатый вал, и силу качания.
Сначала строятся многоугольники скорости и ускорения, как показано на рис. (B) и (c) соответственно. Звенья 3 и 4, объединенные в свободное тело, показаны на рис. (D). Неизвестными являются величины и. Взяв моменты о B, мы получим
или
Сила может быть найдена суммированием сил, действующих на тела 3 и 4 вместе как на свободное тело. Многоугольник сил показан на рис. (E)
.(а) Схема конфигурации
Рис.1 Статический анализ и анализ сил инерции кривошипно-шатунного механизма
Схема свободного тела для звена 2 показана на рис. (F), где
Крутящий момент, прилагаемый валом к кривошипу 2 при O 2 , составляет
Крутящий момент, прилагаемый кривошипом к коленчатому валу, равен T. [2]
Патент США на кривошипно-шатунный механизм с L-образным шатуном Патент (Патент № 9,194,468, выдан 24 ноября 2015 г.)
ПЕРЕКРЕСТНАЯ ССЫЛКА НА СООТВЕТСТВУЮЩИЕ ПРИЛОЖЕНИЯНет.
ОБЛАСТЬ ИЗОБРЕТЕНИЯОбласть этого изобретения относится к проблеме мертвых точек в кривошипно-ползунковом механизме, когда он используется для преобразования линейного движения во вращательное, и к способам их предотвращения.
ИСТОРИЯ ВОПРОСАКривошипно-скользящий механизм — это древний и проверенный метод преобразования вращательного движения в линейное, при котором кривошипно можно вращать многократно и непрерывно, поскольку нет мертвых точек. Однако результирующее линейное движение является возвратно-поступательным, как в поршневом насосе с возвратно-поступательным движением.
Когда тот же механизм используется в обратном направлении для преобразования линейного движения во вращательное, он, однако, прерывается мертвыми точками, которые ограничивают вращение до 180 градусов. ИНЖИР. 1 показаны названия основных частей кривошипно-ползункового механизма, как показано в Британской энциклопедии. ИНЖИР. 2 и фиг. 3 показан кривошипно-ползунковый механизм с обычным прямым шатуном, показывающий мертвые точки в положении «3 часа» и «9 часов».
Исторически проблема мертвых зон была адекватно решена в промышленных приложениях, включая, например, использование вспомогательных или вторичных стержней в паровозе, или использование импульса, создаваемого эффектом маховика, или использование нескольких ползунно-кривошипные механизмы, в которых каждый стержень работает на отдельной фазе вращения.Однако использование этих методов неизбежно делает устройство в целом больше и сложнее и, следовательно, не подходит для миниатюрного использования.
Для миниатюрного использования кривошипно-ползунковый механизм должен иметь более простой метод исключения мертвых точек, который в настоящее время отсутствует. Любой кривошипно-ползунковый механизм для преобразования линейного во вращательное движение, не ограниченный мертвыми точками, может найти применение в ручных инструментах, гаджетах или роботах или в любой ситуации, когда размер и пространство ограничены. Единственным ограничивающим фактором в этом случае будет диаметр вращающегося элемента, но не длина ползуна или толкателя.
КРАТКОЕ ОПИСАНИЕНастоящее изобретение представляет собой устройство и способ исключения мертвых точек в линейно-кривошипно-ползунковом механизме, используемом для преобразования линейного движения во вращательное, с использованием L-образного шатуна с двумя отклоняющими стойками с короткой боковой рычаг L-образного шатуна, перемещающийся между двумя стойками, при этом передний край короткого бокового рычага сталкивается с приближающейся стойкой за долю миллиметра непосредственно перед тем, как он достигнет своего максимального расстояния перемещения, в результате в кривошипно-шатунном штифте на другом конце шатуна, отклоняясь от мертвой точки, без использования какого-либо другого вторичного механизма, и с отклонением, происходящим непосредственно перед прекращением линейного движения и происходящим без остановки , как составная часть линейного движения.Когда L-образный шатун с двумя стойками объединяется с помощью пружины сжатия, линейное движение, вызванное толчком стержня, приведет к плавному и полному вращению вращающегося элемента. Это краткое изложение не предназначено для определения ключевых изобретательских концепций заявленного предмета изобретения и не предназначено для определения объема предмета изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙИмеется 7 листов чертежей и 13 фигур. Фигуры представляют собой примерные конструкции и не предназначены для ограничения объема изобретения.
РИС. 1 представляет собой схему кривошипно-ползункового механизма, показывающую различные части, как показано в Британской энциклопедии. Это предоставлено только с целью объяснения.
Цифровые примечания относятся к техническим названиям различных частей:
- 1 обозначает коленчатый вал, 2 — кривошип, 3 — шатун, 4 — шатун, который является прямым, 5 — штифт, 6 — ползун, 7 — шток или плунжер поршня, 8 — платформа скольжения, а 9 — круг вращения шатунной шейки 3 .
РИС. 2 представляет собой схему, показывающую настоящее устройство с прямым соединительным стержнем в горизонтальном положении с положением верхней мертвой точки в положении «9 часов».
РИС. 3 представляет собой схему, показывающую настоящее устройство с прямым соединительным стержнем с положением нижней мертвой точки в положении «3 часа». Обратите внимание, что если бы все устройство было размещено в вертикальном положении, мертвая точка была бы в 12 и 6 часах.
РИС. 4 представляет собой схему, показывающую настоящее устройство с L-образным шатуном с коротким боковым плечом шатуна, только касающимся стойки с левой стороны, непосредственно перед отклонением.
РИС. 5 представляет собой схему, показывающую настоящее устройство с L-образным шатуном с коротким боковым плечом шатуна, только касающимся стойки с правой стороны, непосредственно перед отклонением.
РИС. 6 — диаграмма, показывающая отклонение шатунной шейки от 9 до 10 часов после приложения максимальной силы к плунжеру, в данном случае автоматически пружиной сжатия.
РИС. 7 представляет собой диаграмму, показывающую отклонение шатунной шейки от 3 футов до 4 часов после того, как на плунжер было приложено максимальное давление большим пальцем или пальцем.
РИС. 8 — вид в перспективе скользящей платформы, показывающий направляющую скольжения, положения двух отклоняющих стоек и углубленную область для размещения вращающегося диска.
РИС. 9 — вид сверху выдвижной платформы, показывающий положение двух стоек.
РИС. 10 — вид сбоку выдвижной платформы, показывающий положение двух стоек.
РИС. 11 — вид конца платформы, где плунжер входит в туннель, показывающий направляющую скольжения непосредственно над туннелем и сообщающуюся с ним, а также вид ближайшей опоры.
РИС. 12 представляет собой трехмерный вид в перспективе всего собранного устройства.
РИС. 13 представляет собой перспективный трехмерный вид устройства с пространственным разделением деталей с числовыми примечаниями к деталям и функциям.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯЦелью настоящего изобретения является устранение мертвых точек в кривошипно-ползунном механизме, когда он используется для преобразования линейного движения во вращательное.
Ссылаясь на чертежи, основным корпусом настоящего устройства является выдвижная платформа 8 , показанная на фиг.1. Различные виды выдвижной платформы показаны на фиг. 8, 9 , 10 и 11 , и физически он размером с мизинец. Тонкий срез его верхней поверхности 101 имеет углубление, так что после установки вращающегося диска 2 верхняя поверхность диска 2 будет на одном уровне с верхней поверхностью платформы 121 . Внешняя форма основного корпуса, несущего платформу, является прямоугольной, но это сделано в целях демонстрации и может иметь любую другую форму, например, полуцилиндрическую.
Вращающийся диск 2 имеет центральное отверстие 109 для установки винта с буртиком 1 , вставляемого в резьбовое отверстие 104 на углубленной части платформы. Головка винта с буртиком 1 войдет в зенковку 112 на диске 2 . Вращающийся диск 2 также имеет периферийное отверстие 108 для установки меньшего винта с буртиком 3 для установки отверстия 107 на прямом конце L-образного шатуна 4 , далее именуемого как L-образный стержень.Вращающийся диск, как показано на рисунке, предназначен для демонстрации и может быть заменен цилиндрическим зубчатым колесом или любым круглым предметом.
L-образный стержень тонкий, плоский и узкий, с отверстиями на каждом конце, 106 и 107 . Его плоская нижняя поверхность скользит по верхней поверхности 111 платформы 8 . На скользящем конце L-образного стержня находится короткий боковой рычаг 105 , который расположен между отклоняющими стойками 10 и 11 .Боковой рычаг L-образной штанги, как показано, имеет прямые края, но эти края могут иметь любую форму.
Маленький винт с буртиком 5 проходит через отверстие 106 на L-образном стержне 4 , чтобы присоединиться к резьбовому отверстию 110 на конце плунжера 6 . Винт 5, действует как шпилька на ФИГ. 1, и скользит по дорожке 103 . Плунжер 7 действует как толкатель для L-образного стержня 4 и скользит внутрь и наружу из туннеля 102 .
Пружина сжатия 12 установлена на валу плунжера 7 и удерживается на месте кнопкой 9 , которая установлена на внешнем конце плунжера 7 . Толкающее действие обеспечивается снаружи большим пальцем или пальцем, а возвратное или тянущее действие обеспечивается пружиной сжатия.
Применяя концепции на фиг. 1 — фиг. 13, винт с буртиком 1 действует как коленчатый вал; корпус вращающегося диска 2, действует как кривошип; малый винт с буртиком 3 действует как шатунная шейка; прямая часть шатуна 4 действует на шатун; винт с буртиком 5 действует как штифт; внутренний наконечник плунжера 6, действует как ползун; корпус плунжера , 7, выполняет роль толкателя; корпус основной части действует как выдвижная платформа 8 .
Описанное здесь устройство имеет две особенности, которые считаются отличительными. Во-первых, шатун вместо того, чтобы быть обычно прямым, имеет L-образную форму, как показано на фиг. 4 и фиг. 5. К скользящему концу шатуна добавлен короткий боковой рычаг 105 . Во-вторых, две отклоняющие стойки 10 и 11 стратегически размещены на пути движения бокового рычага, причем по одной на каждом конце, непосредственно перед тем, как каждый передний край бокового рычага достигает конца своего хода.
В этой конфигурации, как на фиг. 4 и 5, боковой рычаг перемещается между двумя стойками. Ширина боковины, размер и расположение стоек взаимосвязаны, имеют решающее значение и должны быть точно определены. В любом направлении движения передняя кромка бокового рычага 105 расположена так, чтобы контактировать с соответствующей стойкой на доли миллиметра, чуть меньше ее полного хода, заставляя конец шатунной шейки шатуна мгновенно отклоняться. с мертвой точки, как показано на фиг.6 и фиг. 7.
Определение точного размера и точного расположения столбов требует терпения и усилий. Нет простой формулы из-за множества факторов. Самый простой практический метод — сначала собрать все части, кроме столбов, и оставить их напоследок. Затем, поместив шатунный конец шатуна в верхнюю мертвую точку, отметьте положение передней кромки бокового рычага 105 на платформе 1 . Повторите то же самое для положения нижней мертвой точки, но обратите внимание, что противоположный край бокового рычага теперь становится передним краем.Затем, используя разметку в качестве ориентира и зная внешний диаметр используемых столбов, определите центральные положения установки столбов на платформу, как описано выше, чтобы результирующее вмешательство любой из стоек было минимальным и ровно настолько, чтобы вызвать отклонение, но не слишком сильно, чтобы предотвратить полный диапазон движения толчка или тяги. Стойки, конечно, должны иметь круглую внешнюю поверхность и не должны устанавливаться вне досягаемости боковых рычагов.
Принцип работы этого устройства объясняется ниже.В целях иллюстрации предположим, что кривошипно-ползунковое устройство находится в горизонтальном положении, как показано на чертежах, и обращено к считывателю с ползунком на левой стороне считывателя и вращающимся диском на правой стороне считывающего устройства, как на фиг. . 4 и 5. Верхняя мертвая точка будет на отметке 9 часов на диске, а нижняя мертвая точка будет на отметке 3 часа. В настоящем устройстве с L-образной штангой в конце хода толкателя шатунная шейка будет вынуждена оставаться в положении «4 часа» вместо обычных 3 часов, как на фиг.7. В конце хода тяги или обратного хода шатунная шейка будет вынуждена остановиться в положении «10 часов» вместо обычного положения «9 часов», как на фиг. 6.
Непосредственно перед самым концом любого направления движения при толчке или натяжении боковая штанга сталкивается со стойкой. В этот момент дальнейшее продолжение тяги или толчка до максимума приведет к тому, что боковой рычаг будет вращаться вокруг стойки, что приведет к отклонению конца шатунной шейки шатуна из положений мертвой точки 9 часов и 3. час.Следовательно, в конце хода толкателя шатунная шейка будет находиться в положении «4 часа», как на фиг. 7, а в конце рабочего хода шатунная шейка будет находиться в положении «10 часов», как на фиг. 6. В любом положении он автоматически готов к следующему ходу или следующему обратному ходу.
В этом устройстве нажатие выполняется вручную большим пальцем или пальцем на кнопке 6 , а вытягивание или возврат выполняется с помощью пружины сжатия 5 , но это можно изменить.
Отклонение всегда в одном направлении.В этом случае это по часовой стрелке, а вращение всегда по часовой стрелке в одном и том же направлении. Изменение направления отклонения или вращения на обратное невозможно в данной конструкции, но возможно, если расположение бокового рычага и стоек перевернуто на противоположную сторону шатуна. Однако можно иметь боковые рычаги и стойки с обеих сторон шатуна, но с одной стороной, работающей одновременно, чтобы иметь возможность изменять направление вращения диска по желанию.
Простота L-образного соединительного стержня позволяет сделать любое устройство, использующее его, маленьким и одноразовым, или разместить внутри трубки путем придания внешней форме указанной платформы полуцилиндрической формы, или разместить на конце удлиненной канюли. или включены в более крупную часть любого описания для любых целей, таких как робот или ручной инструмент, избегая использования сложных методов или использования электричества, кабелей или батарей для преобразования линейного движения во вращательное движение.
Четырехзвенные рычаги
Модель полной навески
Геометрия представленной ниже модели связи может быть установлена либо с помощью длины звеньев ($ g $, $ a $, $ b $, $ f $) или по превышению количества ($ T_1 $, $ T_2 $, $ T_3 $). Каждый из $ T_i $ положительные или отрицательные, определяют тип ввода и выход (кривошип, коромысло и т. д.). Например, если $ T_3 $ равен отрицательное, тогда $ T_3 = f + b — g — a <0 $, что означает $ g + а> f + b $.\ circ $ (связь «Grashof»), а если $ G \ lt 0 $ тогда обратным будет только самая короткая ссылка (ссылка «Не-Грасгоф»). Если $ V \ lt 0 $, то соединение невозможно, поскольку самая длинная ссылка длиннее, чем общая длина остальные три ссылки.
анимация
сброс настроек
Переменные \ (s \) и \ (l \) самые короткие и самые длинные. длины сторон соответственно, а \ (p \) и \ (q \) — оставшиеся две стороны. Тип входных и выходных ссылок определяется тем, каждое из $ T_1 $, $ T_2 $ и $ T_3 $ положительно, равно нулю или отрицательный. Полная таблица возможностей приведена ниже.
|