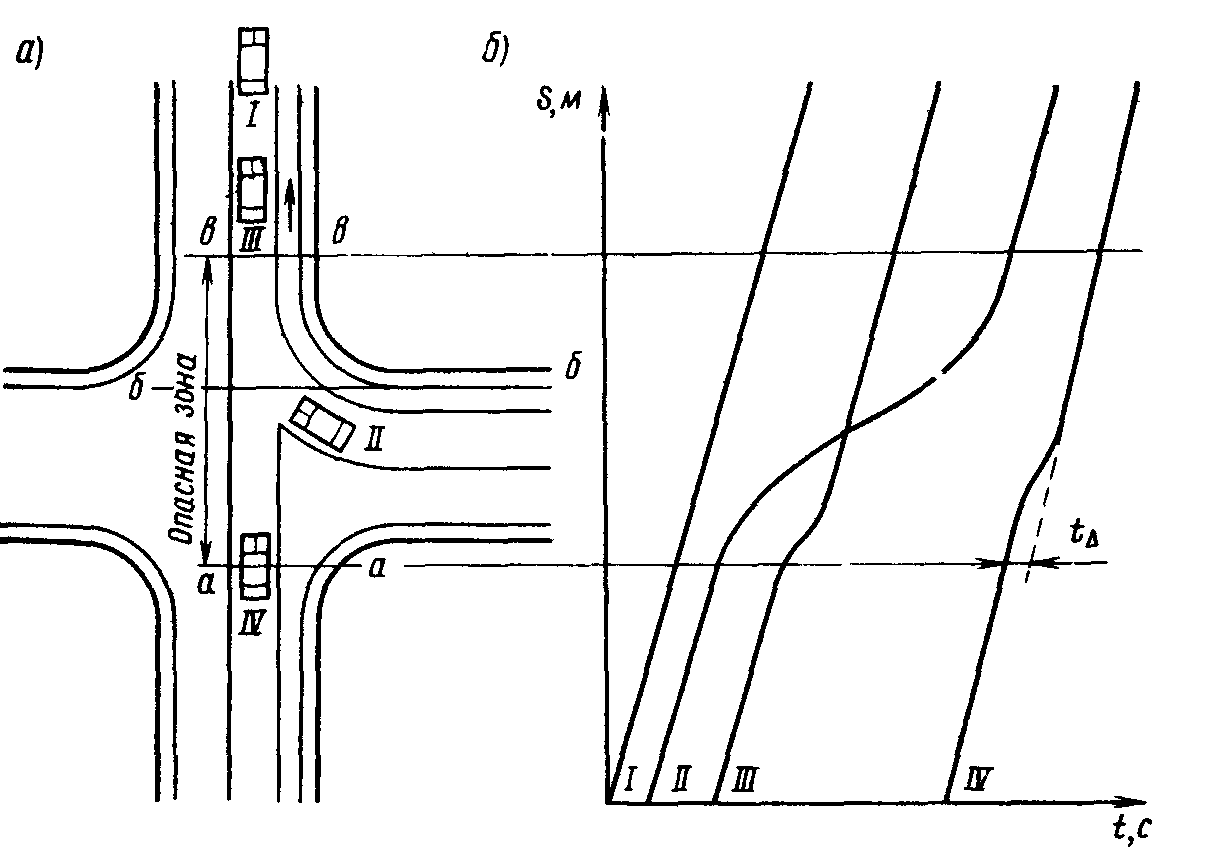
5.4.2 Определение конфликтных точек и конфликтных ситуаций
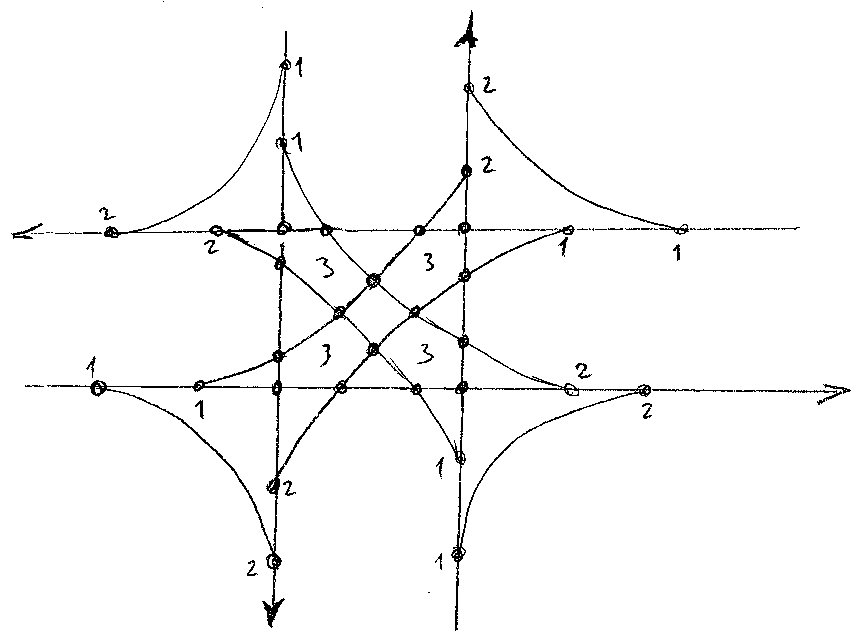
Для оценки степени сложности перекрестка и принятия решения о введении светофорного регулирования необходимо определить число конфликтных точек и степень их опасности (рисунок 5.4; 5.5; 5.6).
Показатель сложности перекрестка при пятибалльной оценки опасности конфликтных точек определятся по формуле:
(5.5)
где nо – число точек отклонения;
nс – число точек слияния;
nn – число точек пересечения.
Число указанных точек может быть определено по численной картограмме интенсивностей движения на перекрестке. По величине показателя m необходимо отнести перекресток к одному из видов сложности:
m<40 – простой;
40<m<80 – средней сложности;
80<m<150 – сложный;
m>15
– очень сложный.
Из формулы (5.5) получим:
m=8+3∙8+5∙16=112
Рисунок 5.2 – Анализ конфликтных ситуаций на нерегулируемом перекрестке ул. Строителей и ул. Плеханова
Можно сделать вывод о том, что перекресток относится к сложным перекресткам.
Конфликтные ситуации определяем по наиболее «слабым» конфликтующим потокам, опираясь на численную картограмму перекрестков.
Рассмотрим конфликтные ситуации для нерегулируемого перекрестка ул. Строителей – ул. Плеханова.
В численной подстановке:
Рассмотрим конфликтные ситуации для отклонения:
Рассмотрим конфликтные ситуации в точках слияния:
5.
 5 Мероприятия по совершенствованию организации дорожного движения
5 Мероприятия по совершенствованию организации дорожного движения5.5.1 Введение светофорного регулирования
К мероприятиям организационного характера относится управление дорожным движением с помощью светофорного регулирования, установки дорожных знаков, дорожной разметки. Светофор — устройство оптической сигнализации, предназначенное для регулирования движения людей, велосипедов, автомобилей и иных участников дорожного движения. Наиболее распространены светофоры с сигналами (обычно круглыми) трёх цветов: красного, жёлтого и зелёного.
Сигналы
могут быть расположены как вертикально
(при этом красный сигнал всегда
располагается сверху, а зелёный — снизу),
так и горизонтально
(при этом красный сигнал всегда
располагается слева, а зелёный — справа).
При отсутствии других, специальных
светофоров они регулируют движение
всех видов транспортных
средств
и пешеходов.
Практически повсеместно красный сигнал
светофора запрещает движение, жёлтый
запрещает выезд на охраняемый светофором
участок, но допускает завершение его
проезда, а зелёный — разрешает движение. Светофорную сигнализацию применяют
для упорядочения поочередного пропуска
транспортных средств и пешеходов на
пересечениях и суженных участках
дорог.Светофорная сигнализация позволяет
добиться: сокращения задержек и числа
дорожно-транспортных происшествий;
координирования управления движением
транспортных потоков на группе пересечений
в пределах магистрали или района;
эффективного использования потенциальной
пропускной способности улично-дорожной
сети [3].
Светофорную сигнализацию применяют
для упорядочения поочередного пропуска
транспортных средств и пешеходов на
пересечениях и суженных участках
дорог.Светофорная сигнализация позволяет
добиться: сокращения задержек и числа
дорожно-транспортных происшествий;
координирования управления движением
транспортных потоков на группе пересечений
в пределах магистрали или района;
эффективного использования потенциальной
пропускной способности улично-дорожной
сети [3].
Рисунок 5.3 – Этапы работы по установке и обслуживанию средств светофорной сигнализации
Установка
светофоров должна обеспечивать их
хорошую видимость и однозначное
истолкование сигналов. Светофоры
устанавливают на колонках, к опорам или
стенкам зданий, на специальных консольных
опорах и тросах-растяжках. Все светофоры
(кроме типов 7 и 8) располагают над проезжей
частью на высоте 4,5-5,5 м или сбоку около
проезжей части на высоте 2-3м. В последнем
случае расстояние от края проезжей
части до опоры составляет 0,5-2м. Для
предотвращения наезда на опоры их
располагают вне проезжей части или
защищают ограждениями. Минимальное
расстояние от створа установки светофора
до стоп — линии при установке светофора
сбоку от проезжей части составляет 1 м,
а над проезжей частью – 3 м. Основной
светофор (типа 1 или 2), если он не регулирует
движение левоповоротных потоков,
устанавливают справа перед перекрестком;
если он имеет секцию для левого поворота,
его располагают перед перекрестком на
разделительной полосе или островке
безопасности, а в случае их отсутствия
он может быть установлен справа. На
простых перекрестках при небольшой
ширине улиц и невысокой интенсивности
движения на пересечении дорог подвешивается
один светофор на тросах-растяжках.
Для
предотвращения наезда на опоры их
располагают вне проезжей части или
защищают ограждениями. Минимальное
расстояние от створа установки светофора
до стоп — линии при установке светофора
сбоку от проезжей части составляет 1 м,
а над проезжей частью – 3 м. Основной
светофор (типа 1 или 2), если он не регулирует
движение левоповоротных потоков,
устанавливают справа перед перекрестком;
если он имеет секцию для левого поворота,
его располагают перед перекрестком на
разделительной полосе или островке
безопасности, а в случае их отсутствия
он может быть установлен справа. На
простых перекрестках при небольшой
ширине улиц и невысокой интенсивности
движения на пересечении дорог подвешивается
один светофор на тросах-растяжках.
Пешеходные светофоры размещают с обеих сторон проезжей части на тротуарах, а при наличии островком безопасности или разделительных полос – также и на них [3].
На
проектируемом участке улицы Мира
основываясь на наблюдения и расчеты
следует ввести светофорное регулирование.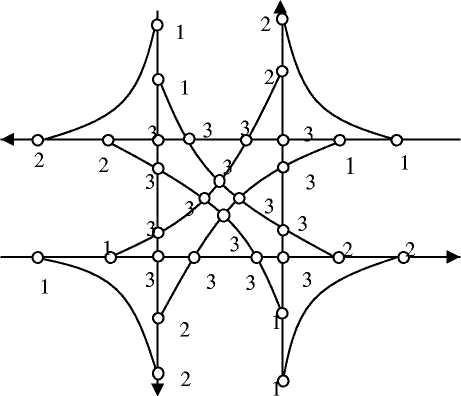
На участке улицы Строителей с пересечением улицы Плеханова находится вещевой рынок и общественные здания. И пешеходы, а в том числе это дети, переходя перекресток, пренебрегают знаками 5.16.1 и 5.16.2 «Пешеходный переход» и тем самым создают конфликтную ситуацию – наезд на пешехода. В связи с этим предлагаемые мероприятия по введению светофорного регулирования помогут предотвратить наезд на пешехода и уменьшить тяжесть последствий, и отрегулировать движения пешеходов и водителей автотранспортных средств.
Техническая
характеристика светофора представлена
в таблице 5.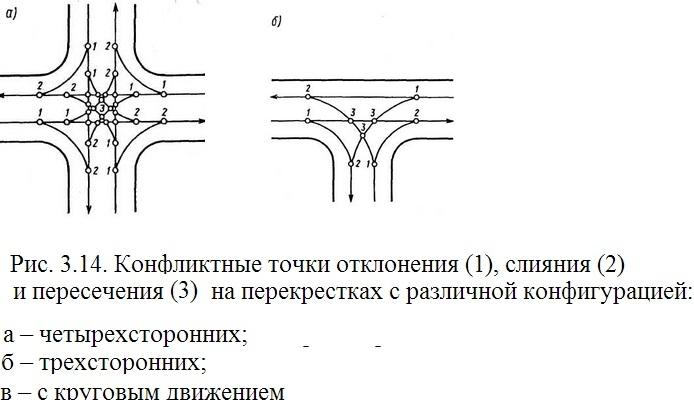 2.
2.
Таблица 5.2 – Техническая характеристика светофора
Внешний вид | |
Наименование | Светофор транспортный светодиодный |
Общие характеристики | Транспортный светофор (три секции) со светодиодными излучателями 300мм |
Продолжение таблицы 5.2
Корпус | Современный корпус из ударопрочного химически стойкого пластика типа ABS/поликарбонат, цвет корпуса черный. |
Электрические параметры | Рабочее напряжение 220В |
Срок службы | 13 лет |
Диапазон рабочих температур | от – 60 С до +60 С |
ОЦЕНКА БЕЗОПАСНОСТИ ДВИЖЕНИЯ МЕТОДОМ КОНФЛИКТНЫХ ТОЧЕК НА ПЕРЕКРЕСТКЕ ВОЗЛЕ ТОГУ
INNOVATIVE VIEWS OF YOUNG SCIENTISTS
SWorld 21-3 April 215 http://www. sworld.education/index.php/ru/conference/the-content-of-conferences/archives-of-individual-conferences/apr-215 INNOVATIVE VIEWS OF YOUNG SCIENTISTS 215 Безопасность Безопасность
sworld.education/index.php/ru/conference/the-content-of-conferences/archives-of-individual-conferences/apr-215 INNOVATIVE VIEWS OF YOUNG SCIENTISTS 215 Безопасность Безопасность
НОУ НП и ДПО Мурманская ОТШ ДОСААФ России
НОУ НП и ДПО Мурманская ОТШ ДОСААФ России Учебные планы по программам подготовки: Водителей ТС категории «A» базового цикла Основы законодательства в сфере дорожного движения. 42 30 12 Психофизиологические
ПодробнееЛегковые автомобили. Грузовые автомобили
Расчетно-графическая работа для гр. 4ЗбПп, 2ЗбПс. Дисциплина: «Транспортная инфраструктура» Тема: «Расчет основных технических нормативов автомобильной дороги» 1. Исходные данные: 1.1. Суммарная перспективная
ПодробнееФОРУМ МОЛОДЫХ УЧЕНЫХ 12(28)
УДК 656 Крюков С.
ЦЕЛЬ И ЗАДАЧИ ДИСЦИПЛИНЫ
ЦЕЛЬ И ЗАДАЧИ ДИСЦИПЛИНЫ 1.1.Цель преподавания дисциплины Эффективность работы автомобильного транспорта, затраты на осуществление транспортной работы, влияние на окружающую среду во многом определяется
ПодробнееФОРУМ МОЛОДЫХ УЧЕНЫХ 12(16)
УДК 656.11 Бурлуцкий А.А., канд. техн. наук, доцент кафедры «Автомобильные дороги» Томский государственный архитектурно-строительный университет Россия, г.томск Солдатов С.М., студент магистратуры, 2 курс,
ПодробнееРУБРИКА: АРХИТЕКТУРА И СТРОИТЕЛЬСТВО
Ходырева Э. В. Совершенствование организации дорожного движения на пешеходных переходах на примере участка свао г. Москвы ул. Широкая Грекова ул. // Академия педагогических идей «Новация». Серия: Студенческий
В. Совершенствование организации дорожного движения на пешеходных переходах на примере участка свао г. Москвы ул. Широкая Грекова ул. // Академия педагогических идей «Новация». Серия: Студенческий
СТАТИСТИКА ДТП ЗА 2018 ГОД.
СТАТИСТИКА ДТП ЗА 2018 ГОД. Только за 2018 год на территории Российской Федерации зафиксировано порядка 126 тыс. дорожно-транспортных происшествий в которых были зарегистрированы пострадавшие и погибшие.
ПодробнееЭКОНОМИКА ДОРОЖНОГО ДВИЖЕНИЯ
Т.В. Коновалова, М.А. Науменко ЭКОНОМИКА ДОРОЖНОГО ДВИЖЕНИЯ Учебное пособие Краснодар 2011 УДК 656.131.05:33 (075.8) ББК 39.3:65 я 73 К 647 Рецензенты: А.Н. Домбровский, первый заместитель главы Муниципального
ПодробнееМУНИЦИПАЛЬНАЯ ЦЕЛЕВАЯ ПРОГРАММА
Утверждена постановлением Главы администрации города Кировска от 25.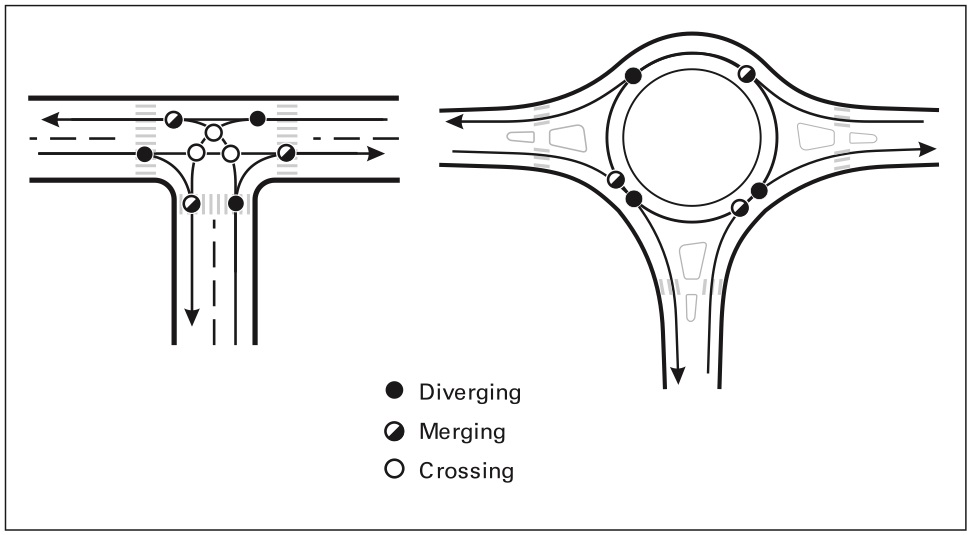 11.2008 422 МУНИЦИПАЛЬНАЯ ЦЕЛЕВАЯ ПРОГРАММА «ПОВЫШЕНИЕ БЕЗОПАСНОСТИ ДОРОЖНОГО ДВИЖЕНИЯ И СНИЖЕНИЕ ДОРОЖНО-ТРАНСПОРТНОГО ТРАВМАТИЗМА В
11.2008 422 МУНИЦИПАЛЬНАЯ ЦЕЛЕВАЯ ПРОГРАММА «ПОВЫШЕНИЕ БЕЗОПАСНОСТИ ДОРОЖНОГО ДВИЖЕНИЯ И СНИЖЕНИЕ ДОРОЖНО-ТРАНСПОРТНОГО ТРАВМАТИЗМА В
СРЕДНЯЯ ОБЩЕОБРАЗОВАТЕЛЬНАЯ ШКОЛА
Комитет по образованию Санкт-Петербурга Государственное бюджетное общеобразовательное учреждение СРЕДНЯЯ ОБЩЕОБРАЗОВАТЕЛЬНАЯ ШКОЛА 564 Адмиралтейского района Санкт-Петербурга 90 005, Санкт-Петербург, улица
ПодробнееОТЗЫВ ОФИЦИАЛЬНОГО ОППОНЕНТА
ОТЗЫВ ОФИЦИАЛЬНОГО ОППОНЕНТА Сильянова Валентина Васильевича на диссертацию Шешера Николая Геннадьевича «Повышение безопасности дорожного движения на основе усовершенствованной методики коэффициентов аварийности
ПодробнееКак вид человеческой деятельности
Сезонная устойчивость характеристик автотранспортной аварийности на примере Тюмени А. И. Петров, канд. техн. наук, доцент кафедры «Эксплуатация автомобильного транспорта» Тюменского государственного нефтегазового
И. Петров, канд. техн. наук, доцент кафедры «Эксплуатация автомобильного транспорта» Тюменского государственного нефтегазового
МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ
Государственное образовательное учреждение высшего профессионального образования «Тихоокеанский государственный университет» МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ Методические указания и варианты заданий по выполнению
ПодробнееОСНОВЫ ЭКСПЛУАТАЦИИ АВТОМОБИЛЬНЫХ ДОРОГ
СЫКТЫВКАРСКИЙ ЛЕСНОЙ ИНСТИТУТ КАФЕДРА ДОРОЖНОГО, ПРОМЫШЛЕННОГО И ГРАЖДАНСКОГО СТРОИТЕЛЬСТВА ОСНОВЫ ЭКСПЛУАТАЦИИ АВТОМОБИЛЬНЫХ ДОРОГ Сборник описаний лабораторных работ для подготовки дипломированных специалистов
ПодробнееПоложение о конкурсе Перекресток»
Положение о конкурсе Перекресток» Организаторы конкурса: отделение Государственной инспекции безопасности дорожного движения Отдела МВД России по городу Бердску, Л. А. Цорн. Цель конкурса: ликвидировать
А. Цорн. Цель конкурса: ликвидировать
URBAN PASSENGER TRAFFIC SAFETY TRANSPORT IN YEKATERINBURG
УДК 656.13 БЕЗОПАСНОСТЬ ДВИЖЕНИЯ ГОРОДСКОГО ПАССАЖИРСКОГО ТРАНСПОРТА В Г. ЕКАТЕРИНБУРГЕ Алексеева О. В., Сидоров Б. А., Чернышев О. Н. ФГБОУ ВПО «Уральский государственный лесотехнический университет»,
ПодробнееБезопасность дорожного движения
УДК 656.13.08:656.142 Грибанова Анна Александровна, студент, гр. 2мПД2, МАДИ, Россия, 125319, Москва, Ленинградский пр., 64, [email protected] АНАЛИЗ АВАРИЙНОСТИ В Г. МОСКВЕ С УЧАСТИЕМ ПЕШЕХОДОВ Аннотация.
ПодробнееПРАВИТЕЛЬСТВО РОССИЙСКОЙ ФЕДЕРАЦИИ
ПРАВИТЕЛЬСТВО РОССИЙСКОЙ ФЕДЕРАЦИИ П О С Т А Н О В Л Е Н И Е от 16 ноября 2018 г. 1379 МОСКВА Об утверждении Правил определения основных параметров дорожного движения и ведения их учета В соответствии
ПодробнееОценка безопасности движения на пересечениях автомобильных дорог
Библиографическое описание:Титова, А.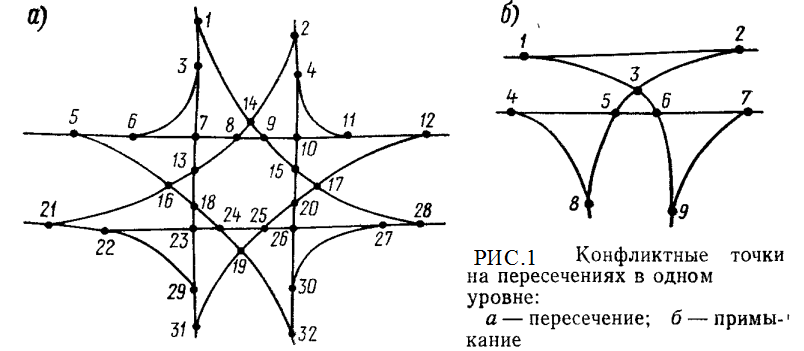 А. Оценка безопасности движения на пересечениях автомобильных дорог / А. А. Титова, В. Ю. Ивлев, П. А. Титова. — Текст : непосредственный // Технические науки в России и за рубежом : материалы IV Междунар. науч. конф. (г. Москва, январь 2015 г.). — Москва : Буки-Веди, 2015. — С. 72-74. — URL: https://moluch.ru/conf/tech/archive/124/6999/ (дата обращения: 10.02.2021).
А. Оценка безопасности движения на пересечениях автомобильных дорог / А. А. Титова, В. Ю. Ивлев, П. А. Титова. — Текст : непосредственный // Технические науки в России и за рубежом : материалы IV Междунар. науч. конф. (г. Москва, январь 2015 г.). — Москва : Буки-Веди, 2015. — С. 72-74. — URL: https://moluch.ru/conf/tech/archive/124/6999/ (дата обращения: 10.02.2021).
Ежегодно увеличивается количество автомобилей во всем мире, растет объем перевозок. Это способствует увеличению интенсивности движения. В условиях городов с исторически сложившейся застройкой это в свою очередь приводит к возникновению транспортной проблемы.
Особенно остро транспортная проблема проявляется в узловых пунктах улично-дорожной сети, т. е. на перекрестках. Из статистических данных видно, что около 40 % дорожно-транспортных происшествий происходит на перекрестках.
В городах России давно сложилась историческая планировка улично-дорожной сети. Из-за увеличения количества транспорта возникает перенасыщение улично-дорожной сети, что не отвечает требованиям современного дорожного движения.
Из-за всего этого образуются очереди, увеличиваются транспортные задержки и заторы. Это приводит к снижению скорости сообщения, неоправданному перерасходу топлива и повышенному изнашиванию узлов и агрегатов транспортных средств.
Все это влияет на снижение эффективности использования транспортных средств, скорость движения автомобилей. Снижение скорости транспорта из-за простоя у перекрестков приводит к повышению уровня шума, увеличению загазованности воздушного бассейна города и перерасходу горюче-смазочных материалов.
Частые остановки, переменный режим движения, скопления автомобилей на перекрестках являются причинами загрязнения воздуха в городах. Так же увеличивается шумовое воздействие.
Для того чтобы обеспечить быстрое и безопасное движение в городах необходимо применить комплекс архитектурно-планировочных и организационных мероприятий. Сюда можно отнести реконструкцию существующих и строительство новых улиц, а также строительство пешеходных переходов (подземных и надземных), транспортных развязок, объездных дорог и т.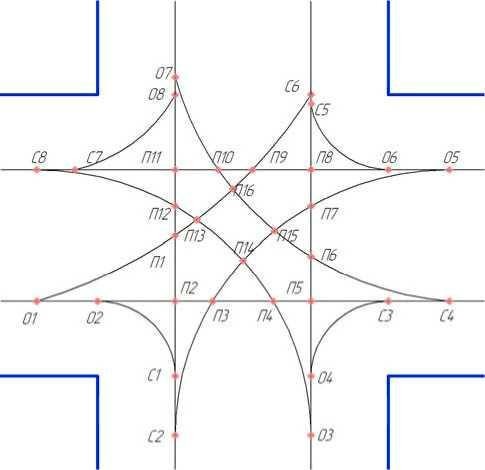 д.
д.
Безопасность дорожного движения — состояние данного процесса, отражающее степень защищенности его участников от дорожно-транспортных происшествий и их последствий. [4]
Дорожно-транспортное происшествие — событие, возникшее в процессе движения по дороге транспортного средства и с его участием, при котором погибли или ранены люди, повреждены транспортные средства, сооружения, грузы либо причинен иной материальный ущерб. [4]
Обеспечение безопасности дорожного движения — деятельность, направленная на предупреждение причин возникновения дорожно-транспортных происшествий, снижение тяжести их последствий. [4]
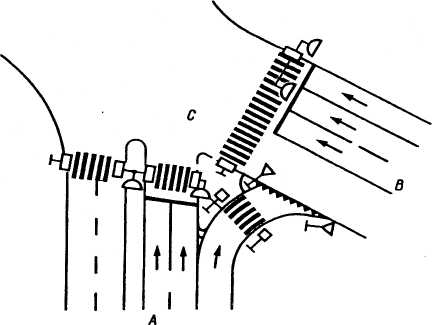
Как показывают исследования, большинство дорожно-транспортных происшествий происходит в «конфликтных точках», т. е. в местах, где на одном уровне пересекаются траектории движения транспортных средств или транспортных средств и пешеходов, а также в местах слияния и отклонения транспортных потоков (рисунок 1). Чаще всего такие ситуации возникают на пересечениях дорог, где встречаются потоки различных направлений. Также, часть конфликтов происходит на перегонах дорог при перестроениях автомобилей в рядах маневрировании и при переходе проезжей части пешеходами вне перекрестков.
Также, часть конфликтов происходит на перегонах дорог при перестроениях автомобилей в рядах маневрировании и при переходе проезжей части пешеходами вне перекрестков.
Рис. 1. Конфликтные точки
Наиболее часто такое взаимодействие участников дорожного движения возникает на пересечениях дорог, где встречаются потоки различных направлений (рисунок 2). [3]
Рис. 2. Пример расположения конфликтных точек на перекрестке: 1 — отклонения; 2 — слияния; 3 — пересечения
Для того чтобы рассчитать показатель безопасности движений, который характеризует число дорожно-транспортных происшествий на данном перекрестке, применяют следующую формулу:
, (1)
где М — число конфликтных точек, N — интенсивность движения конфликтующих транспортных потоков, — коэффициент относительной опасности каждой конфликтной точки
Таблица 1
Значение коэффициентов относительной опасности для наиболее характерных случаев конфликтных точек
|
Условия движения |
Направление движение автомобилей |
Характеристика пересечения |
Значения ki |
|
1. |
Правый поворот
Левый поворот |
R<15 м R≥15 м
R<10 м 10<R<25 м |
0,025 0,004
0,032 0,025 |
|
2. Разделение потоков |
Правый поворот
Левый поворот |
R<15 м R≥15 м
R<10 м 10<R<25 м |
0,02 0,006
0,03 0,004 |
|
3. |
Пересечение под углом |
α ≤ 300 500 ≤ α < 750 900 ≤ α < 1200 1500 ≤ α < 1800 |
0,008 0,036 0,012 0,035 |
 Слияние потоков
Слияние потоков Пересечение потоков
Пересечение потоков
В зависимости от значения ka каждый перекресток по степени опасности может быть: [2]
ka < 3 — неопасным
3 < ka < 8 — малоопасным
8 < ka < 12 — опасным
ka > 12 — очень опасным
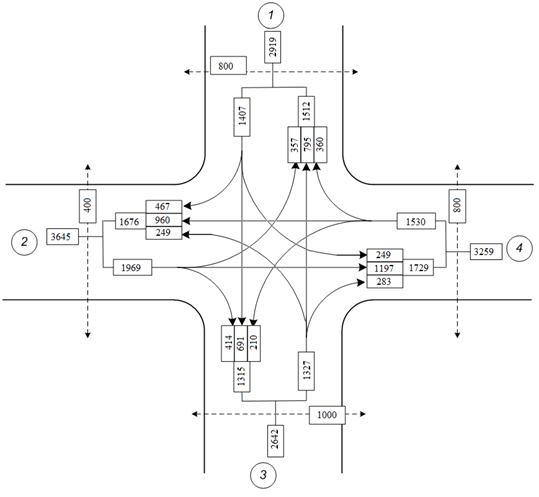
В данной работе мы определили степень опасности перекрестка ул.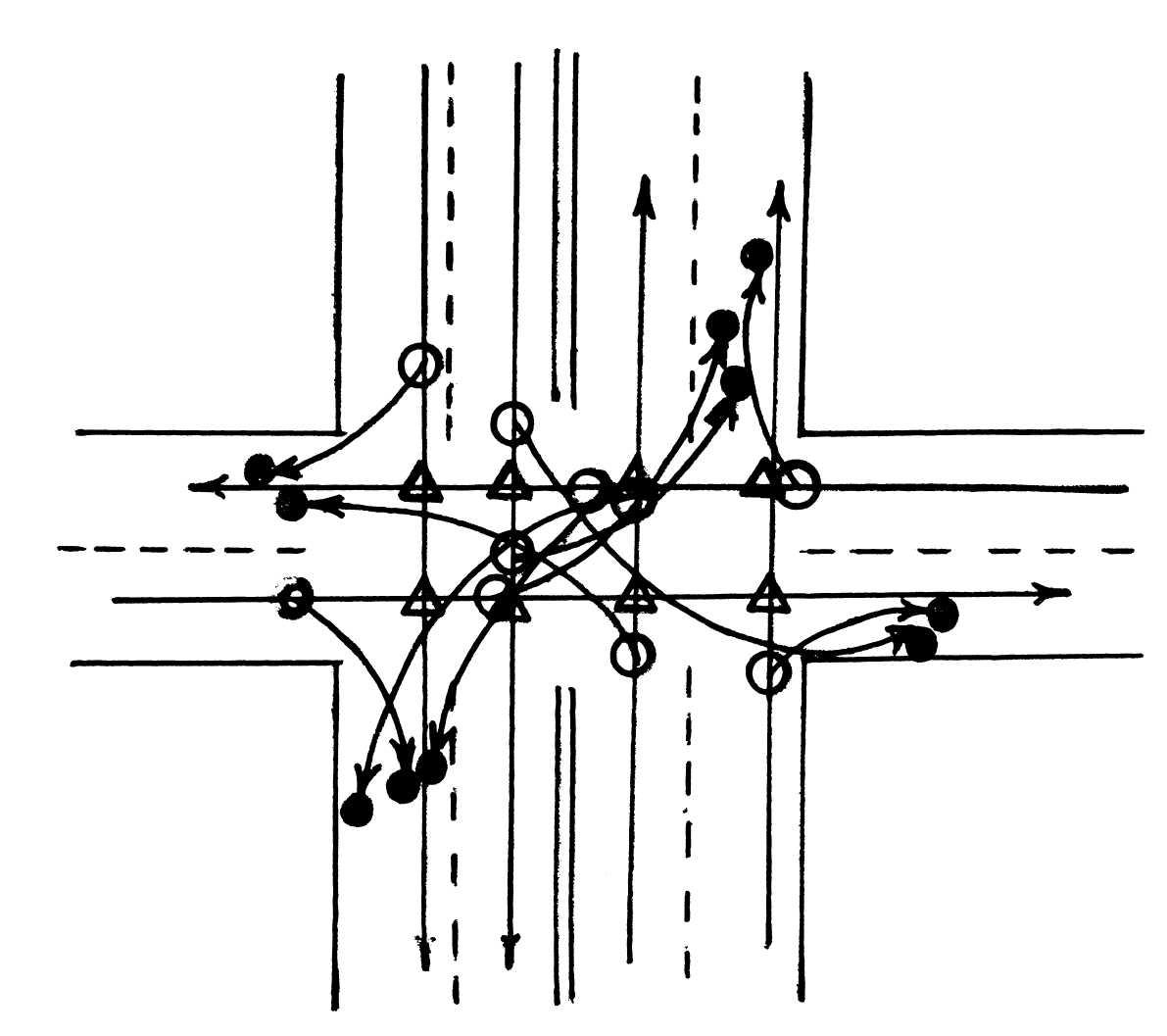 Карла Маркса и ул. Державинская города Тамбова с учетом всех возможных направлений движения транспортных потоков и интенсивности движения.
Карла Маркса и ул. Державинская города Тамбова с учетом всех возможных направлений движения транспортных потоков и интенсивности движения.
Далее представим расчет необходимого числа полос движения, представленных на рисунке 3:
Рис. 1. Перекресток ул. Карла Маркса и ул. Державинская города Тамбова
I. СЛИЯНИЕ ПОТОКОВ:
II. ОТВЕТВЛЕНИЕ ПОТОКОВ:
III. ПЕРЕСЕЧЕНИЕ ПОТОКОВ:
Из расчетов сделаем вывод, что степень опасности перекрестка ул. Карла Маркса и ул. Державинская с учетом всех возможных направлений движения транспортных потоков и интенсивности движения составляет 4,14. Из этого следует, что данный участок является малоопасным.
Литература:
1. Бабков В. Ф. Дорожные условия и безопасность движения. — М. : Транспорт, 1982. — С. 110.
: Транспорт, 1982. — С. 110.
2. Клинковштейн Г. И., Афанасьев М. Б. Организация дорожного движения. [Электронный ресурс]. — Режим доступа: URL: http://gendocs.ru/v33022/клинковштейн_г.и._организация_дорожного_движения?page=14 (дата обращения: 15 декабря 2014).
3. Конфликтные точки [Электронный ресурс]. — Режим доступа: URL: http://lektsiopedia.org/lek-9910.html (дата обращения: 15 декабря 2014).
4. ФЗ от 10 декабря 1995 г. № 196-ФЗ «О безопасности дорожного движения» [Электронный ресурс]. — Режим доступа: URL: http://base.consultant.ru/cons/cgi/online.cgi?req=doc;base=LAW;n=156600 (дата обращения: 15 декабря 2014).
Основные термины (генерируются автоматически): перекресток, улично-дорожная сеть, карла Маркса, интенсивность движения, дорожное движение, город Тамбова, Левый поворот, опасность перекрестка, относительная опасность, III, пересечение дорог, ПЕРЕСЕЧЕНИЕ ПОТОКОВ, поток, правый поворот, происшествие, СЛИЯНИЕ ПОТОКОВ, средство, транспортная проблема, возможное направление движения.
Дороги России XXI века 03 (2019)
Дороги России | № 3 (111) | 2019
67
БЕ ЗОП АСНОС Т Ь Н А ДОР ОГА Х
кругового перекрестка не падает, поскольку здесь
зачастую нет светофоров и транспортный поток
постоянен. При соблюдении правил маневриро-
вания на перекрестке движение по самому кругу
происходит быстрее.
При этом круговой перекресток допускает уста-
новку светофоров для дополнительного распре-
деления потоков, если движение в определенные
часы слишком напряженное. Их можно отключать
в условиях невысокого трафика.
Движение на кольцевых пересечениях имеет не-
сколько недостатков: водители вынуждены сни-
жать скорость даже при низкой загруженности
перекрестка, усложняется организация движения
пешеходов и велосипедистов, возникают сложно-
сти с размещением пешеходных переходов.
Исследование Федерального дорожного управ-
ления США года подтвердило, что на обыч-
ных перекрестках существует потенциально
опасных участка, на которых происходят стол-
кновения. При этом на перекрестках с движени-
ем, организованным по системе раундэбаут, их
всего восемь. На территории России действует
На территории России действует
ОДМ ..– «Методические рекоменда-
ции по проектированию кольцевых пересечений
при строительстве и реконструкции автомобиль-
ных дорог», рекомендованный Распоряжением
Федерального дорожного агентства от ..
№ -р, который устанавливает всего кон-
фликтных точек на перекрестках с круговым дви-
жением, и — на обычных перекрестках.
Круг или раундэбаут?
Чем отличается обычный перекресток с круговым
движением от перекрестка, организованного по си-
стеме раундэбаут? Обычное кольцо работает как
клеверная развязка, где машины с прилегающих
улиц как бы вливаются в поток на кольце, пере-
страиваясь в желаемом направлении.
На перекрестках, организованных по системе
раундэбаут, водители обязаны уступать транс-
порту, движущемуся по кольцу (на каждом выез-
де на такой перекресток устанавливается знак .
«Уступите дорогу»), и въезжают на круг только
при полном отсутствии машин. Перестраиваться
на таких перекрестках нельзя, и водители долж-
ны выбирать нужную полосу движения заранее.
Более того, полосы движения могут быть огра-
ничены разделителями, которые пресекут пе-
рестроения водителей на круге, или содержать
дополнительные изгибы, снижающие скорость
проезда по перекрестку. Так движение становит-
Так движение становит-
ся еще более безопасным.
При этом само кольцо при такой организации
занимает меньше пространства, как и подъезды
к перекрестку. Как правило, примыкающие до-
роги изгибаются перед примыканием к кольцу
и спрямляются на съездах с таких перекрестков.
За счет этого скорость на подъезде к перекрест-
ку постепенно снижается, сохраняется во время
движения по кольцу и увеличивается на съезде
с перекрестка.
Y
Количество потенци-
ально опасных участ-
ков на перекрестках
по данным Научно-
исследовательского
совета по транспорту
Национальной академии
наук США
V
Количество потен-
циально опасных
участков на перекре-
сках в соответствии
с ОДМ 218. 2.071–2016
2.071–2016
Разветвление потоков
Слияние потоков
Пересечение потоков
32 конфликтные точки «авто — авто»
24 конфликтные точки «авто — пешеход»
8 конфликтных точек «авто — авто»
8 конфликтных точек «авто — пешеход»
Моделирование транспортных и пешеходных потоков на перекрестке ул. Старцева и Бульвар Гагарина
Объектом исследования является перекресток ул. Старцева с Бульваром Гагарина. На исследуемом перекрестке движение транспортных потоков организованно в одном уровне. Маневры левого поворота со всех направлений осуществляются через отложенные развороты на ул. Старцева.
Рис. 1. Фрагмент перекрестка ул. Старцева и Бульвара Гагарина
Основная проблема, возникающая в настоящий момент на рассматриваемом пересечении – затруднен маневр левого поворота с западного направления ул. Чкалова в северном направлении Б.Гагарина, в данном направлении наблюдается большая интенсивность транспортного потока. При существующей организация движения на исследуемом перекрестке через один отложенный поворот совершается не только маневр левого поворота с западного направления ул. Старцева в северном направлении Б.Гагарина, но и маневр левого поворота с южного направления Б.Гагарина на западное направление ул. Старцева, что увеличивает нагрузку на данный отложенный поворот.
Чкалова в северном направлении Б.Гагарина, в данном направлении наблюдается большая интенсивность транспортного потока. При существующей организация движения на исследуемом перекрестке через один отложенный поворот совершается не только маневр левого поворота с западного направления ул. Старцева в северном направлении Б.Гагарина, но и маневр левого поворота с южного направления Б.Гагарина на западное направление ул. Старцева, что увеличивает нагрузку на данный отложенный поворот.
Чтобы облегчить данный маневр для транспортных средств, на отложенном повороте были установлены блоки для выделения крайней левой полосы для упрощения маневра. Однако данное решение имеет ряд недостатков. Установленные блоки изменяют траекторию движения для транспортных средств, движущихся прямо по ул. Старцева со стороны Восточного обхода, вынуждая данный поток перестраиваться из трех рядов в два. Это изменение траектории движения транспортных средств существенно влияет на безопасность осуществления рассматриваемого маневра. Кроме того, водители, следующие через отложенный поворот, предпочитают пропускать движущийся со стороны Восточного обхода транспорт, а не выезжать в левый ряд, чтобы затем перестроиться в средний для совершения правого поворота на Бульвар Гагарина.
Кроме того, водители, следующие через отложенный поворот, предпочитают пропускать движущийся со стороны Восточного обхода транспорт, а не выезжать в левый ряд, чтобы затем перестроиться в средний для совершения правого поворота на Бульвар Гагарина.
Для устранения данных проблем были предложены несколько вариантов организации дорожного движения на пересечении ул. Старцева и Бульвара Гагарина. Оценить данные варианты и выбрать наиболее оптимальный было решено с помощью микромоделирования данных вариантов в программном комплексе PTV Vision Vissim.
Сбор исходных данных
Необходимые для микромоделирования интенсивности транспортных потоков были получены из транспортной модели г. Перми. Для калибровки транспортной модели были использованы натурные данные об интенсивностях транспортных потоков. Сбор натурных данных проводился в утреннее и вечернее пиковое время. С утра с 8-30 до 9-30 часов; вечером с 18-00 до 19-00 часов. Итоговые картограммы интенсивности транспортных потоков для утреннего и вечернего часов пик приведены на рисунках 2 и 3.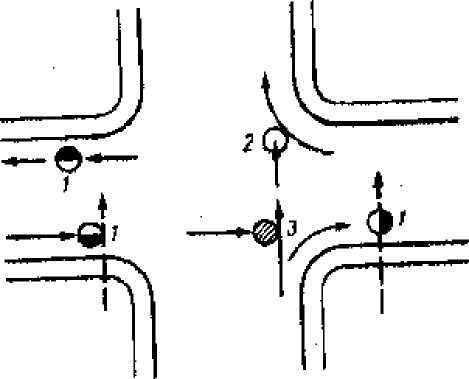
Рис.2. Картограмма интенсивности транспортных потоков. Утренний час пик, авт/час
Рис.3. Картограмма интенсивности транспортных потоков. Вечерний час пик, авт/час.
Проектные предложения
Изначально для моделирования было предложено 3 варианта изменения организации движения на исследуемом перекрестке.
Вариант 1. Предусмотрен дополнительный съезд для транспортных средств, движущихся с запада по ул. Старцева и совершающих маневр «поворот налево». Дополнительный съезд расположен справа от проезжей части и вливается в крайнюю правую полосу на ул. Лихвинская.
Рис.4. Организация дорожного движения для варианта 1.
Вариант 2. Проектный вариант 2 отличается от варианта 1 тем, что в нем предусмотрен дополнительный съезд с ул. Лихвинской направо в восточном направлении ул. Старцева. Отложенным съездом будут пользоваться транспортные средства, движущиеся с ул. Лихвинской по ул. Старцева как в восточном направлении, так и в западном (через существующий отложенный поворот). Предложенный вариант снижает нагрузку на перекресток в его юго-восточной части, так как исчезает конфликтная точка в месте пересечения съезда с ул. Старцева и ул. Лихвинская.
Лихвинской по ул. Старцева как в восточном направлении, так и в западном (через существующий отложенный поворот). Предложенный вариант снижает нагрузку на перекресток в его юго-восточной части, так как исчезает конфликтная точка в месте пересечения съезда с ул. Старцева и ул. Лихвинская.
Рис.5. Организация дорожного движения для варианта 2.
Вариант 3. Предложенный вариант предусматривает обустройство отложенного разворота транспортных средств на ул. Лихвинской для совершения левого поворота с западной части ул. Старцева в северном направлении Б.Гагарина.
Рис.6. Организация дорожного движения для варианта 3.
Микромоделирование вариантов 1-3
Для предложенных вариантов было проведено микромоделирование в программном комплексе PTV Vision Vissim. Исходными данными для моделирования были интенсивности транспортных и пешеходных потоков, полученные на транспортной модели города Перми. Предварительно модель была откалибрована с использованием данных натурных замеров интенсивностей транспортных потоков. Используемые при моделировании интенсивности для утреннего и вечернего часов пик приведены на рисунках 2 и 3 соответственно.
Предварительно модель была откалибрована с использованием данных натурных замеров интенсивностей транспортных потоков. Используемые при моделировании интенсивности для утреннего и вечернего часов пик приведены на рисунках 2 и 3 соответственно.
Вариант 1.
Моделирование рассматриваемого варианта для утреннего часа пик показывает, что в южной части исследуемого перекрестка на ул. Лихвинской образуются заторы. Конфликтная точка для рассматриваемого варианта – это перестроения на первой и второй полосе на ул. Лихвинской с южного направления. Первый ряд выезжает с дополнительного съезда на вторую полосу, чтобы совершать движение прямо, а второй ряд перестраивается в первую полосу, чтобы совершить правый поворот. Конфликт приводит к затору, который формируется до конца зоны моделирования, т.е. до перекрестка ул. Лихвинская и ул. Самаркандская.
Для вечернего часа пик ситуация усугубляется тем, что интенсивность движения по дополнительному съезду увеличивается.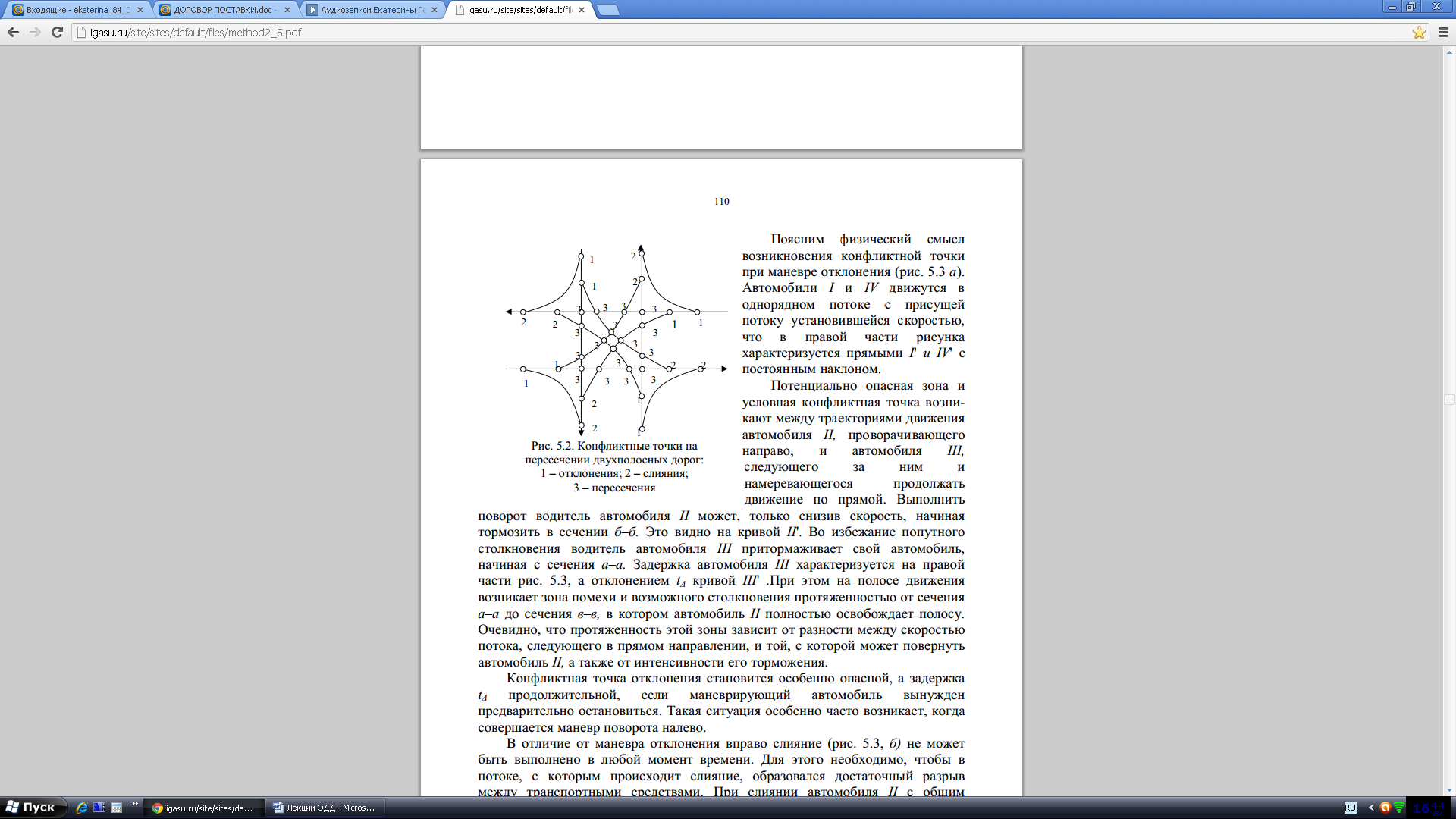 Вследствие этого задержки на данной конфликтной точке существенно увеличиваются. Затор возникает также на ул. Старцева с западного направления. Транспортные средства, которые хотят повернуть направо, перекрывают первую и вторую полосы движения при перестроении в крайний правый ряд.
Вследствие этого задержки на данной конфликтной точке существенно увеличиваются. Затор возникает также на ул. Старцева с западного направления. Транспортные средства, которые хотят повернуть направо, перекрывают первую и вторую полосы движения при перестроении в крайний правый ряд.
Рис.7. Фрагмент участка моделирования варианта 1 (374 секунда имитации. Вечерний час пик).
Вариант 2
Моделирование проектного варианта 2 показало, что существенных задержек для утреннего и вечернего часов пик не возникает. При данном варианте организации движения транспортные потоки строго разделены, количество конфликтных точек доведено до минимума. Имитационное моделирование показывает, что заторов при моделировании пиковых нагрузок не возникает.
Рис.8. Фрагмент участка моделирования варианта 2 (828 секунда имитации. Вечерний час пик).
Вариант 3
При моделировании 3-го варианта проектных предложений существенные заторы возникают на ул. Лихвинской. Транспортный поток, совершающий через данный отнесенный поворот маневр левого поворота с западного направления ул. Старцева на Бульвар Гагарина, сдерживает транспортные средства, которые движутся в прямом направлении с бульвара Гагарина на ул. Лихвинскую, вследствие чего появляются дополнительные задержки на бульваре Гагарина.
Лихвинской. Транспортный поток, совершающий через данный отнесенный поворот маневр левого поворота с западного направления ул. Старцева на Бульвар Гагарина, сдерживает транспортные средства, которые движутся в прямом направлении с бульвара Гагарина на ул. Лихвинскую, вследствие чего появляются дополнительные задержки на бульваре Гагарина.
Рис. 9. Фрагмент участка моделирования варианта 3 (756 секунда имитации. Вечерний час пик).
Сравнительный анализ проектных вариантов
Сравнительный анализ вариантов проводился отдельно для утреннего и вечернего часа пик. Основными параметрами сравнительного анализа являются: – средняя скорость движения в зоне моделирования – ведется подсчет средней скорости движения каждого транспортного средства; – среднее время задержки – для всех транспортных средств рассчитывается время которое они затратили на прохождение зоны моделирования сверх того времени за которое они бы могли проехать в свободной сети. Далее это время усредняется для каждого транспортного средства; – количество выехавших транспортных средств (пропускная способность перекрестка).
Далее это время усредняется для каждого транспортного средства; – количество выехавших транспортных средств (пропускная способность перекрестка).
Таблица 1.
Параметры моделирования для утреннего часа пик.
| Параметр | Вариант 1 | Вариант 2 | Вариант 3 |
| Полное время в пути [ч] | 151,428 | 115,957 | 222,659 |
| Общее время задержки [ч] | 79,376 | 40,906 | 164,808 |
| Время задержки до вставки [ч] | 50,336 | 0,188 | 176,565 |
| Общее время остановок [ч] | 48,19 | 22,476 | 96,861 |
| Количество невведенных ТС | 151 | 0 | 471 |
| Количество остановок | 7536 | 4555 | 14663 |
| Количество транспортных средств в сети | 168 | 113 | 323 |
| Количество выехавших транспортных средств | 4944 | 5152 | 3967 |
| Общий отрезок пути [км] | 3405,781 | 3551,918 | 2710,502 |
| Среднее время простоя транспортного средства [с] | 33,937 | 15,368 | 81,282 |
| Cреднее число остановок транспортного средства | 1,474 | 0,865 | 3,418 |
| Средняя скорость [км/ч] | 22,491 | 30,631 | 12,173 |
| Среднее время задержки транспортного средства [с] | 55,899 | 27,97 | 138,301 |
Таблица 2.
Параметры моделирования для вечернего часа пик.
| Параметр | Вариант 1 | Вариант 2 | Вариант 3 |
| Полное время в пути [ч] | 221,234 | 111,989 | 274,226 |
| Общее время задержки [ч] | 167,134 | 43,146 | 217,869 |
| Время задержки до вставки [ч] | 96,356 | 0,091 | 405,587 |
| Общее время остановок [ч] | 121,296 | 25,504 | 130,479 |
| Количество невведенных ТС | 699 | 0 | 977 |
| Количество остановок | 11025 | 4557 | 18346 |
| Количество транспортных средств в сети | 394 | 118 | 435 |
| Количество выехавших транспортных средств | 3654 | 4651 | 3918 |
| Общий отрезок пути [км] | 2520,238 | 3222,651 | 2634,795 |
| Среднее время простоя транспортного средства [с] | 107,872 | 19,252 | 107,908 |
| Cреднее число остановок транспортного средства | 2,724 | 0,956 | 4,215 |
| Средняя скорость [км/ч] | 11,392 | 28,776 | 9,608 |
| Среднее время задержки транспортного средства [с] | 148,637 | 32,57 | 180,181 |
Сравнительный анализ результатов моделирования показывает, что наиболее оптимальным вариантом является вариант 2.
Средняя скорость для варианта 2 в утренний час пик в 2 раза выше, чем для варианта 3 и в 3 раза выше, чем для варианта 2. Для вечернего часа пик средняя скорость также выше по сравнению с остальными вариантами.
Среднее время задержки, приходящееся на одно транспортное средство, для утреннего часа пик для варианта 2 на 87 сек меньше, чем для варианта 3 и на 164 сек меньше, чем для варианта 1. Для вечернего часа пик среднее время задержки для варианта 2 также является наименьшим.
По всем показателям качества функционирования существенный приоритет у варианта 2. Однако данный вариант является наиболее затратным для реализации, так как предусматривает большой объем нового строительства, а также большой объем выкупа земли.
Для обсуждения результатов проведенного моделирования было организованно совещание с представителями Министерства транспорта Пермского края. На совещании было принято решение о доработке проектных предложений с целью уменьшения стоимости проекта. За основу для нового варианта было решено взять вариант 2. Новому варианту присвоили номер 4. Кроме варианта 4, было проведено микромоделирование для существующей схемы организации движения на исследуемом перекрестке. Кроме того, для обоих вариантов был проведен сравнительный анализ параметров качества функционирования перекрестка.
Новому варианту присвоили номер 4. Кроме варианта 4, было проведено микромоделирование для существующей схемы организации движения на исследуемом перекрестке. Кроме того, для обоих вариантов был проведен сравнительный анализ параметров качества функционирования перекрестка.
Дополнительный анализ вариантов. Сравнительный анализ существующей схемы и проектного варианта 4
Существующая ситуация
На рисунке 10 приведен фрагмент картограммы с обозначениями движения транспортных потоков по полосам и организации дорожного движения. Для существующей ситуации все маневры, связанные с левыми поворотами осуществляются через отложенные развороты. Развороты находятся на ул. Старцева. В настоящее время перестроение из крайней левой полосы в правую затруднено, так как наблюдается большая интенсивность потока, движущегося в прямом направлении.
Рис.10. Организация дорожного движения для существующего варианта.
Вариант 4
Вариант 4 является доработкой варианта 2. Отличием проектного варианта 4 от варианта 2 является организация правого поворота с западного направления ул. Старцева на ул. Лихвинскую через уширение ул. Старцева непосредственно перед перекрестком вместо съезда, аналогичного съезду с ул. Лихвинская на ул. Старцева. На рисунке 11 приведен фрагмент участка улично-дорожной сети с организацией дорожного движения для проектного варианта 4. Длина уширения составляет 120 м.
Рис.11. Организация дорожного движения для варианта 4.
Микромоделирование существующей ситуации и варианта 4
Микромоделирование существующей ситуации показывает, что основные задержки в движении транспортных потоков возникают на ул. Старцева при подъезде к перекрестку с западного направления, на ул. Лихвинской с южного направления и на отложенном развороте в восточной части ул. Старцева. На рисунке 12 приведен фрагмент участка моделирования для существующей ситуации.
Рис.12. Фрагмент участка моделирования существующей схемы организации движения (850 секунда имитации. Вечерний час пик).
На рисунке 13 приведен фрагмент участка моделирования для проектного варианта 4. В данном варианте не образуется заторов, так как все потоки разнесены по направлениям и отсутствует конфликтная точка в южной части перекрестка на ул. Лихвинская.
Рис.13. Фрагмент участка моделирования варианта 4 (830 секунда имитации. Вечерний час пик).
Сравнительный анализ существующей ситуации и варианта 4
Сравнительный анализ результатов дополнительного исследования был проведен для трех вариантов:
1) существующая ситуация;
2) вариант 2;
3) вариант 4.
В сравнительном анализе использовались те же параметры, что и при сравнении вариантов 1, 2 и 3. В таблицах 3 и 4 приведены результаты сравнительного анализа для утреннего и вечернего часа пик соответственно.
Таблица 3.
Результаты сравнительного анализа существующей ситуации,
варианта 2 и 4. Утренний час пик.
Параметр | Существ. | Вариант 2 | Вариант 4 |
Полное время в пути [час] | 235,795 | 115,957 | 112,192 |
Общее время задержки [час] | 172,06 | 40,906 | 37,708 |
Время задержки до вставки [час] | 65,814 | 0,188 | 0,181 |
Общее время остановок [час] | 107,343 | 22,476 | 20,159 |
Кол. | 348 | 0 | 0 |
Кол. остановок | 16435 | 4555 | 4376 |
Количество транспортных средств в сети | 299 | 113 | 111 |
Количество выехавших транспортных средств | 4407 | 5152 | 5152 |
Общий отрезок пути [км] | 2996,896 | 3551,918 | 3557,497 |
Среднее время простоя транспортного средства [с] | 82,115 | 15,368 | 13,789 |
Среднее число остановок транспортного средства | 3,492 | 0,865 | 0,831 |
Средняя скорость [км/ч] | 12,71 | 30,631 | 31,709 |
Среднее время задержки транспортного средства [с] | 131,622 | 27,97 | 25,793 |
 не введенных ТС
не введенных ТСТаблица 4.
Результаты сравнительного анализа существующей ситуации,
варианта 2 и 4. Вечерний час пик.
| Параметр | Существующий вариант | Вариант 2 | Вариант 4 |
| Полное время в пути [ч] | 154,449 | 111,989 | 105,826 |
| Общее время задержки [h] | 87,032 | 43,146 | 37,86 |
| Время задержки до вставки [ч] | 2,17 | 0,091 | 0,091 |
| Общее время остановок [ч] | 40,692 | 25,504 | 21,074 |
| Количество невведенных ТС | 31 | 0 | 0 |
| Количество остановок | 9135 | 4557 | 4325 |
| Количество транспортных средств в сети | 230 | 118 | 112 |
| Количество выехавших транспортных средств | 4583 | 4651 | 4643 |
| Общий отрезок пути [км] | 3172,452 | 3222,651 | 3221,671 |
| Среднее время простоя транспортного средства [с] | 30,437 | 19,252 | 15,955 |
| Cреднее число остановок транспортного средства | 1,898 | 0,956 | 0,91 |
| Средняя скорость [км/ч] | 20,54 | 28,776 | 30,443 |
| Среднее время задержки транспортного средства [с] | 65,098 | 32,57 | 28,664 |
Сравнительный анализ результатов микромоделирования показал, что вариант 4 имеет лучшие значения показателей качества функционирования, чем остальные варианты. Так, вариант 4 имеет меньшее время задержки ТС по сравнению с вариантом 2 и существующей ситуацией и наибольшую среднюю скорость.
Так, вариант 4 имеет меньшее время задержки ТС по сравнению с вариантом 2 и существующей ситуацией и наибольшую среднюю скорость.
Результаты моделирования варианта 4 и сравнительный анализ вариантов были представлены специалистам Министерства транспорта в ходе очередного совещания. В ходе совещания было решено остановиться на варианте 4 как наиболее оптимальном с точки зрения параметров качества функционирования.
По результатам совещания для более детальной проработки варианта 4 были сформулированы две задачи:
• с помощью микромоделирования оценить возможность обустройства остановки общественного транспорта в восточной части ул. Старцева,
• оценить изменение параметров качества функционирования исследуемого перекрестка на 2016 и 2030 годы в связи с изменением параметров подвижности населения, а также развитием жилого микрорайона «Ива».
Моделирование варианта 4 с обустройством остановочного пункта в восточной части ул. Старцева
На рисунке 10 приведен фрагмент картограммы с обозначениями движения транспортных потоков по полосам и организации дорожного движения.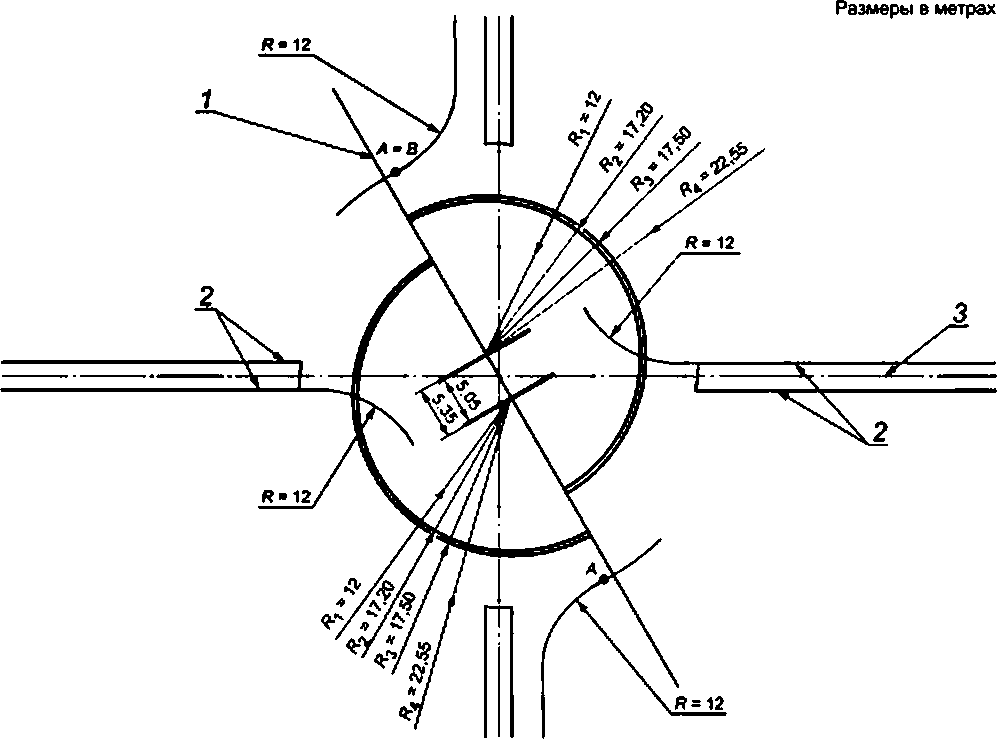 Остановка ОТ обустроена в восточной части ул. Старцева в направлении движения к Восточному обходу.
Остановка ОТ обустроена в восточной части ул. Старцева в направлении движения к Восточному обходу.
По результатам моделирования обустройство остановочного пункта не приведет к ухудшению параметров функционирования исследуемого перекрестка. Для автобусов, которые останавливаются на данном остановочном пункте, также отсутствуют затруднения при движении. В связи с этим, решено включить данные остановочный пункт в состав варианта 4.
Рис. 14. Схема участка моделирования варианта 4 с обустройством остановки ОТ в восточной части ул. Старцева.
Моделирование варианта 4 на 2016 и 2030 годы
Для микромоделирования варианта 4 на 2016 и 2030 годы на транспортной модели г. Перми был проведен расчет прогнозных интенсивностей на данные периоды. Значения параметров, определяющих рост интенсивности (уровень автомобилизации, количество транспортных корреспонденций) были рассчитаны в ходе подготовки проекта Генерального плана г. Перми на основе статистических данных по крупным городам Германии и Италии.
Перми на основе статистических данных по крупным городам Германии и Италии.
В результате построения последовательности статистических моделей, описывающих характер использования индивидуального и общественного транспорта, были получены прогнозные значения подвижности населения крупных городов на примере города Перми (см. таблицу).
| Параметр | ||||
| уровень автомобилизации, авт./тыс. жителей | общее количество корреспонденций | доля корреспонденций ИТ | количество корреспонденций ИТ | |
| 2009 | 206 | 1995000 | 0,55 | 1 097 250 |
| 2016 | 308 | 2048865 | 0,612 | 1 253 905 |
| 2022 | 391 | 2105202 | 0,593 | 1 248 385 |
| 2030 | 509 | 2283611 | 0,607 | 1 386 152 |
| источник | данные по Германии | данные по Италии | данные по Италии | вычисление |
| способ получения | соответствие по годам | экстраполяция данных, пропорциональное изменение данных для Перми | экстраполяция данных | произведение доли корреспонденций ИТ общего кол-ва корреспонденций |
Таким образом, к 2016 году рост количества корреспонденций на индивидуальном транспорте в городе Перми составит 14,2% относительно 2011 года. До 2022 года количество корреспонденций на индивидуальном транспорте останется примерно на том же уровне, после чего к 2030 году вырастет примерно до уровня 26,3% относительно 2011 года.
До 2022 года количество корреспонденций на индивидуальном транспорте останется примерно на том же уровне, после чего к 2030 году вырастет примерно до уровня 26,3% относительно 2011 года.
Также при прогнозировании учитывалось изменение расселения жителей вследствие строительства жилого комплекса «Грибоедовский» в м/р Ива. По предварительным данным в данном жилом комплексе планируется проживание около 5000 человек. Соответствующие изменения были внесены в транспортную модель г. Перми. В результате были получены прогнозные значения интенсивностей транспортных потоков (рисунок 15,16)
Рис. 15. Прогнозные интенсивности на 2016 год. Утренний час пик, авт/час.
Рис. 16 Прогнозные интенсивности на 2016 год. Вечерний час пик, авт/час.
Рис.17. Прогнозные интенсивности на 2030 год. Утренний час пик, авт/час.
Рис. 18. Прогнозные интенсивности на 2030 год. Вечерний час пик, авт/час.
18. Прогнозные интенсивности на 2030 год. Вечерний час пик, авт/час.
Для имитационных моделей с прогнозными значениями интенсивностей транспортных потоков также был проведен анализ параметров качества функционирования. Результаты анализа приведены в таблице.
| параметр | утренний час пик | вечерний час пик | ||
| 2016-2022 Вариант 4 | 2030 Вариант 4 | 2016-2022 Вариант 4 | 2030 Вариант 4 | |
| Полное время в пути [ч] | 119,572 | 146,915 | 135,893 | 155,231 |
| Общее время задержки [ч] | 40,563 | 62,414 | 51,582 | 63,989 |
| Время задержки до вставки [ч] | 0,524 | 3,316 | 0,179 | 1,238 |
| Общее время остановок [ч] | 21,227 | 32,815 | 28,227 | 32,539 |
| Количество невведенных ТС | 0 | 0 | 0 | 0 |
| Количество остановок | 4629 | 6416 | 5600 | 6676 |
| Количество транспортных средств в сети | 125 | 184 | 147 | 206 |
| Количество выехавших транспортных средств | 5525 | 5931 | 5871 | 6397 |
| Общий отрезок пути [км] | 3786,347 | 4077,582 | 4067,369 | 4428,774 |
| Среднее время простоя транспортного средства [с] | 13,525 | 19,319 | 16,885 | 17,74 |
| Cреднее число остановок транспортного средства | 0,819 | 1,049 | 0,931 | 1,011 |
| Средняя скорость [км/ч] | 31,666 | 27,755 | 29,931 | 28,53 |
| Среднее время задержки транспортного средства [с] | 25,846 | 36,744 | 30,856 | 34,887 |
Таким образом, по результатам анализа параметров качества функционирования перекрестка вариант 4 будет функционировать лучше, чем существующий вариант организации движения до 2030 года.
Моделирование вариантов 5 и 6
Результаты моделирования вариантов 1-4, а также результаты моделирования для прогнозных интенсивностей на 2016 и 2030 годы для варианта 4 были представлены представителям Министерства транспорта. По итогам совещания было решено разбить реализацию варианта 4 на два этапа:
1. Оставить существующую организацию дорожного движения, но перенести отложенный разворот в восточной части ул. Старцева на 120 м восточнее от перекрестка с Б.Гагарина (рис. 15). Данный вариант получил порядковый номер 5. Предполагается, что это решение позволит транспорту накапливаться после перекрестка с Б.Гагарина, а не перед ним, что позволит решить проблему заторов вследствие выезда на перекресток автомобилей с западной стороны ул. Старцева.
Рис. 19. Схема организации движения для варианта 5.
2. Добавить к варианту 5 изменения из варианта 4: остановка ОТ в восточной части ул. Старцева, организовать поворот с ул. Чкалова на Б.Гагарина через отложенный правый поворот на ул. Лихвинская, организовать правый съезд с ул. Лихвинской на ул. Старцева. Данный вариант получил порядковый номер 6.
Чкалова на Б.Гагарина через отложенный правый поворот на ул. Лихвинская, организовать правый съезд с ул. Лихвинской на ул. Старцева. Данный вариант получил порядковый номер 6.
Рис. 20. Схема организации движения для варианта 6.
По результатам моделирования вариантов 5 и 6 была также проведен анализ параметров качества функционирования перекрестка. Результаты анализа вариантов 5 и 6 приведены в таблицах.
Таблица 7. Результаты моделирования для вариантов 5 и 6. Утренний час пик.
| Параметр | Вариант 5 | 2016-2022 Вариант 5 | 2030 Вариант 5 | Вариант 6 | 2016-2022 Вариант 6 | 2030 Вариант 6 |
| Полное время в пути [час] | 159,79 | 183,243 | 299,422 | 123,658 | 130,975 | 153,741 |
| Общее время задержки [час] | 74,878 | 96,004 | 223,102 | 38,29 | 40,374 | 56,946 |
| Время задержки до вставки [час] | 0,56 | 100,312 | 145,812 | 0,19 | 0,535 | 1,006 |
| Общее время остановок [час] | 37,776 | 52,366 | 146,501 | 20,621 | 21,245 | 30,701 |
| Количество невведенных ТС | 0 | 247 | 617 | 0 | 0 | 0 |
| Количество остановок | 8115 | 9352 | 17205 | 4492 | 4664 | 6072 |
| Количество транспортных средств в сети | 160 | 200 | 455 | 115 | 137 | 165 |
| Количество выехавших транспортных средств | 5112 | 5241 | 4605 | 5159 | 5529 | 5961 |
| Общий отрезок пути [км] | 4102,676 | 4225,878 | 3682,708 | 4123,623 | 4388,988 | 4715,867 |
| Среднее время простоя транспортного средства [с] | 25,795 | 34,648 | 104,23 | 14,076 | 13,498 | 18,042 |
| Среднее число остановок транспортного средства | 1,539 | 1,719 | 3,4 | 0,852 | 0,823 | 0,991 |
| Средняя скорость [км/ч] | 25,675 | 23,062 | 12,299 | 33,51 | 33,347 | 30,674 |
| Среднее время задержки транспортного средства [с] | 51,131 | 63,52 | 158,729 | 25,653 | 26,136 | 33,465 |
Таблица 8.![]() Результаты моделирования для вариантов 5 и 6. Вечерний час пик.
Результаты моделирования для вариантов 5 и 6. Вечерний час пик.
| Параметр | Вариант 5 | 2016-2022 Вариант 5 | 2030 Вариант 5 | Вариант 6 | 2016-2022 Вариант 6 | 2030 Вариант 6 |
| Полное время в пути [час] | 124,661 | 189,021 | 319,92 | 113,371 | 152,874 | 163,945 |
| Общее время задержки [час] | 46,804 | 92,23 | 230,838 | 37,338 | 56,824 | 58,962 |
| Время задержки до вставки [час] | 0,275 | 1,058 | 139,691 | 0,092 | 0,281 | 0,239 |
| Общее время остановок [час] | 23,807 | 40,438 | 131,021 | 20,724 | 29,511 | 30,579 |
| Количество невведенных ТС | 0 | 0 | 776 | 0 | 0 | 0 |
| Количество остановок | 5248 | 9083 | 18780 | 4286 | 6013 | 6447 |
| Количество транспортных средств в сети | 157 | 251 | 487 | 109 | 194 | 172 |
| Количество выехавших транспортных средств | 4611 | 5784 | 5368 | 4650 | 5844 | 6441 |
| Общий отрезок пути [км] | 3736,582 | 4719,281 | 4336,386 | 3639,898 | 4676,185 | 5141,761 |
| Среднее время простоя транспортного средства [с] | 17,975 | 24,122 | 80,559 | 15,677 | 17,595 | 16,647 |
| Среднее число остановок транспортного средства | 1,101 | 1,505 | 3,208 | 0,901 | 0,996 | 0,975 |
| Средняя скорость [км/ч] | 29,974 | 24,967 | 13,555 | 32,106 | 31,363 | 30,589 |
| Среднее время задержки транспортного средства [с] | 35,339 | 55,017 | 141,933 | 28,245 | 32,098 | 33,88 |
По результатам анализа результатов моделирования можно сделать следующие выводы. Вариант 5 по основным параметрам (средняя скорость, среднее время задержки ТС) до 2022 года функционирует оптимальнее, чем существующее состояние (существующий вариант организации дорожного движения на исследуемом перекрестке с существующими на 2011 год потоками). Однако к 2030 году параметры функционирования исследуемого перекрестка становятся хуже, чем для существующего состояния. Так, к 2030 году для варианта 5 средняя скорость падает до 13,55 км/ч, то есть становится в 1,5 раза меньше, чем для существующей ситуации. Среднее время задержки к 2030 году становится равным 141,993, что в 2 раза больше, чем для существующей ситуации. Таким образом, после 2022 года на основе варианта 5 необходимо начинать реализацию варианта 6, то есть строительство отнесенных поворотов.
Вариант 5 по основным параметрам (средняя скорость, среднее время задержки ТС) до 2022 года функционирует оптимальнее, чем существующее состояние (существующий вариант организации дорожного движения на исследуемом перекрестке с существующими на 2011 год потоками). Однако к 2030 году параметры функционирования исследуемого перекрестка становятся хуже, чем для существующего состояния. Так, к 2030 году для варианта 5 средняя скорость падает до 13,55 км/ч, то есть становится в 1,5 раза меньше, чем для существующей ситуации. Среднее время задержки к 2030 году становится равным 141,993, что в 2 раза больше, чем для существующей ситуации. Таким образом, после 2022 года на основе варианта 5 необходимо начинать реализацию варианта 6, то есть строительство отнесенных поворотов.
Выводы
В ходе работ было выполнено микромоделирование движении транспортных потоков для существующей схемы организации движения на исследуемом перекрестке, а также для 3 проектных вариантов. Для каждого варианта организации движения на исследуемом перекрестке был проведен сравнительный анализ параметров качества функционирования перекрестка. В результате проведенного анализа наиболее оптимальным признан вариант 2. На его основе были разработан проектный вариант 4.
Для каждого варианта организации движения на исследуемом перекрестке был проведен сравнительный анализ параметров качества функционирования перекрестка. В результате проведенного анализа наиболее оптимальным признан вариант 2. На его основе были разработан проектный вариант 4.
Для проектного варианта 4 было выполнено моделирование с использованием как существующих, так и прогнозных интенсивностей транспортных потоков на 2016, 2022 и 2030 годы. Прогнозные интенсивности были рассчитаны на транспортной модели г. Перми на основе статистических моделей, построенных по данным крупных городов Европы. Моделирование показало большой запас пропускной способности для данного варианта вплоть до 2030 года. С целью удешевления данного варианта было решено разбить его реализацию на 2 этапа. Первый этап реализации варианта 4 получил порядковый номер 5, второй этап – номер 6.
Для вариантов 5 и 6 также было выполнено моделирование с использованием как существующих, так и прогнозных интенсивностей транспортных потоков на 2016, 2022 и 2030 годы с целью определить запас пропускной способности данных вариантов организации движения. В результате проведенного анализа параметров качества функционирования был сделан вывод о том, что после 2022 года вариант 5 начинает работать хуже, чем существующая схема организации движения с потоками на 2011 год, и необходимо начинать реализацию варианта 6.
В результате проведенного анализа параметров качества функционирования был сделан вывод о том, что после 2022 года вариант 5 начинает работать хуже, чем существующая схема организации движения с потоками на 2011 год, и необходимо начинать реализацию варианта 6.
Таким образом, в ходе работы был проведен анализ предлагаемых вариантов организации движения на исследуемом перекрестке, из них был выбран наиболее оптимальный вариант (вариант 4). Далее для данного варианта было проведено исследование запаса его пропускной способности и разработан план его реализации – путем реализации сначала малозатратного варианта 5 и дальнейшей реализации на его основе варианта 6 по мере исчерпания вариантом 5 запаса пропускной способности.
Велики блог — LiveJournal
Некоторое время назад я устроил в некотором роде провокационный опросик в некой соцсети. Спрашивал велосипедистов и автолюбителей нашего города, какой из вариантов организации одного перекрестка им кажется более удобным и безопасным.Задавать такие вопросы неспециалистам может показаться бесполезным. Но я ведь и сам неспециалист. Мне было интересно проверить, как к одним и тем же неудобствам относятся более защищенные участники дорожного движения и более уязвимые. Было интересно найти в обсуждениях опросов какие-то подтверждения своим наблюдениям и идеям, умную критику и вещи, которые я сам не заметил.
Посмотреть результаты опроса и почитать комментарии можно по этим ссылкам:
— в сообществе велосипедистов,
— в сообществе автоводителей.
А я расскажу, чем плоха нынешняя ситуация, и какие дилетантские и не очень, варианты улучшений у нас есть.
Перекресток это вполне реальный. Пересечение улиц Курчатова и Жака Дюкло. Вот он на Яндекс.панорамах.
Нынешняя ситуация
Вот схема, наглядно показывающая существующее положение дел на этом перекрестке:
Дороги, уходящие направо и налево — это улица Курчатова, а улица, приходящая сверху — Жака Дюкло. Припаркованные на проезжей части и на тротуарах машины — реалии жизни.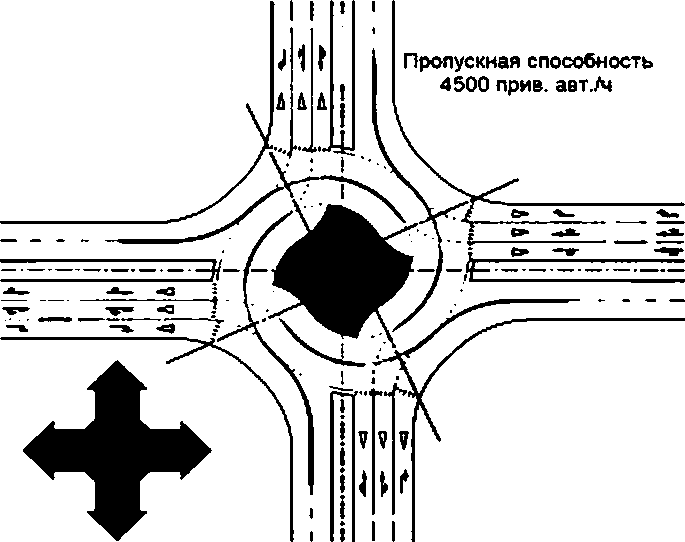 Трогательно было видеть в “велосипедных” комментариях заботу об этих парковщиках.
Трогательно было видеть в “велосипедных” комментариях заботу об этих парковщиках.
Итак, проблемы существующей планировки. Сначала тезисно.
- Неопределенные траектории движения — способствуют возникновению дополнительных конфликтных точек, понижают безопасность движения. Особенно для транспортных средств, поворачивающих налево. Особенно для велосипедистов.
- Припаркованные на перекрестке автомобили ограничивают водителям обзор как пешеходов на переходах, так и приближающихся с других направлений автомобилей.
- Большие радиусы закруглений края проезжей части и большая площадь самого перекрестка делают возможным движение через перекресток на большой скорости.
- Отсутствует переход рядом с остановкой на ул. Курчатова (в правой части схемы).
Начнем с самых уязвимых участников движения — пешеходов.
В той части ул. Курчатова, что уходит с перекрестка направо, в направлении Политехнической ул. , рядом с автобусной остановкой нет пешеходного перехода. Вероятно, потому, что в этом месте все равно почти никто не переходит дорогу. Ну кроме людей, которым надо попасть на остановку. А так у всех, кто идет от (м) Политехническая, есть целых 250 метров от поворота к метро до этой остановки, чтобы перейти улицу.
, рядом с автобусной остановкой нет пешеходного перехода. Вероятно, потому, что в этом месте все равно почти никто не переходит дорогу. Ну кроме людей, которым надо попасть на остановку. А так у всех, кто идет от (м) Политехническая, есть целых 250 метров от поворота к метро до этой остановки, чтобы перейти улицу.
А те два перехода, что на перекрестке есть, для пешеходов еще более небезопасны. Припаркованные перед ними автомобили не позволяют водителям, приближающимся к перекрестку, заблаговременно заметить пешеходов на переходе. Ну и пешеходам из-за машин тоже не сразу видны приближающиеся машины.
Велосипедистам перекресток помогает не расслабляться и оставаться в тонусе. Особенно при повороте налево. У перекрестка нет выраженного центра или обозначенных направлений движения. Угадать, кто по какой траектории поедет, непросто. Кроме того, неудобства и опасность представляют автомобили, обгоняющие велосипедистов на самом перекрестке, причем как правило на большой скорости, что становится возможным вследствие чрезмерной площади перекрестка и большим радиусам поворотов.
Трудности для автоводителей заключаются, в первую очередь, в неопределенности траекторий движения на перекрестке — непонятно, и как самому тут надо ехать, и где останавливаться, чтобы пропустить “помеху справа”, и еще более неясно, как поедут другие. Ограниченная видимость пешеходных переходов, хотя и представляет бОльшую опасность для пешеходов, но мешает при этом скорее движению автотранспорта.
Чуть было не забыл про преимущества существующей планировки. Буду краток. Никаких положительных сторон в существующей планировке я не вижу.
Как видно, большинство проблем вызваны слишком большой площадью этого перекрестка. Но в то же время этот простор позволяет легко изменить его планировку, не затрагивая прилежагающие земельные участки. И у нас есть два альтернативных варианта планировки, оба из которых вписываются в границы существующей проезжей части. Любой из них, если вдруг будут сомнения, можно сначала опробовать в “мягком” и дешевом варианте — за счет применения разметки и временных дорожных ограждений, а потом уже «отлить в асфальте».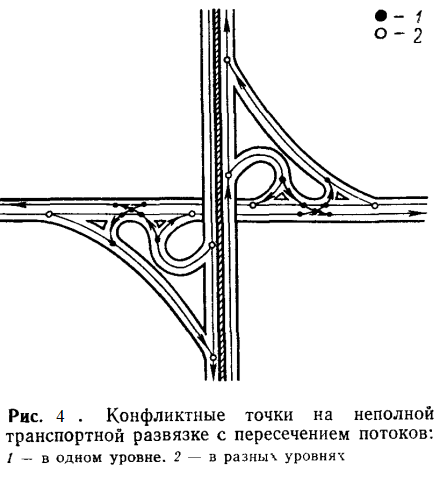
Вариант с круговым движением
Перекрестки с круговым движением — самый безопасный способ организации нерегулируемого пересечения. На круговых перекрестках минимально количество конфликтных точек, и к тому же, из всех возможных типов конфликтов — отклонения, слияния и пересечения, здесь нет самых опасных — точек пересечения направлений движений.
В варианте, когда на кольце имеется только одна полоса движения, такие перекрестки наиболее безопасны и для велосипедистов при смешанном движении. Также круговые перекрестки обладают и большей пропускной способностью по сравнению с обычными нерегулируемыми перекрестками.
Для большей пропускной способности и безопасности движения рекомендуется предоставить преимущество транспортным средствам, движущимся по кольцу.
Преимущества:
- Минимальное количество конфликтных точек, причем наиболее опасные конфликтные точки — точки пересечения, исключены вовсе.
- Снижает скорость движения на перекрестке (успокоение трафика).

- Повышает пропускную способность нерегулируемого пересечения.
- Круговой перекресток с одной полосой движения — один из самых безопасных видов перекрестков для движения велосипедистов.
Возможные минусы:
- Сложность реорганизации контактной сети троллейбусов.
- Для увеличения пропускной способности и безопасности велосипедного движения преимущество должно быть у транспорта, движущегося по кругу.
- При наличии на перекрестке более одной полосы движения (в том числе, и в случае, если вторая полоса — велосипедная) аварийность с участием велосипедистов сильно повышается.
Преимущества:
- Привычный и узнаваемый способ организации примыкания улиц.
- Становятся проще условия движения — один из левых поворотов преобразуется в проезд прямо.
- Малый радиус закруглений и локализованный изгиб ул. Курчатова способствует снижению скорости при проезде перекрестка, что повышает безопасность движения.
- Требует меньших изменений троллейбусной контактной сети. Схема движения троллейбусов сохраняется.

Что дальше?
Дальше с помощью Святослава Данилова (СПБ.АВТО) эти предложения пойдут в Дирекцию по организации дорожного движения (ДОДД). СПБ.АВТО очень любит всякие дорожные эксперименты. Надеюсь, им удастся сподвигнуть на это и ДОДД.
Спасибо, кстати, Святославу и за параллельный опрос в автомобильном сообществе. И раз дело дошло до благодарностей, не могу не сказать, что наглядные и понятные картинки, и половина идей обязаны своим появлением Леониду Андрухову, а вариант Т-образного перекрестка, о котором мы даже не задумывались, появился в списке благодаря Сергею Давыдову. За что я им обоим очень благодарен.
А что же с опросом?
Опрос показал ,что подавляющее большинство велосипедистов (более 90%) считают, что нынешняя планировка перекрестка уступает по удобству и безопасности обоим предлагаемым вариантам реорганизации движения. При этом перекресток с круговым движением представляется более удобным и безопасным большему числу велосипедистов. В автомобильном сообществе предпочтения распределились не столь контрастно, но большинство автолюбителей так же считает перекресток с круговым движением более более удобным и безопасным.
При этом перекресток с круговым движением представляется более удобным и безопасным большему числу велосипедистов. В автомобильном сообществе предпочтения распределились не столь контрастно, но большинство автолюбителей так же считает перекресток с круговым движением более более удобным и безопасным.
Вот результаты за первые сутки опросов (велосипедисты слева, автоводители справа):
P.S. Если вдруг среди читателей этого поста есть специалисты по дорожному проектированию, транспортному планированию или градостроительству, желающие поучаствовать в деле велосипедизации Санкт-Петербурга, давайте дружить. Напишите мне. Вместе мы сможем добиться большего.
Двигаться по кругу станет проще: на дорогах «нарисуют» турбоперекрёстки
Круговой перекрёсток нового типа в 2019 году появится в столице России. Более конкретные сроки пока не называются.
Москва – не только столица России, но и главный город для проведения различных дорожных экспериментов. Так что местным водителям приходится довольно оперативно привыкать к новшествам во время движения. В скором времени здесь будут тестировать так называемое «турбокольцо» – это круговой перекресток нового типа. Объект появится в 2019 году на пересечении улиц Красного Маяка и Чертановской.
Так что местным водителям приходится довольно оперативно привыкать к новшествам во время движения. В скором времени здесь будут тестировать так называемое «турбокольцо» – это круговой перекресток нового типа. Объект появится в 2019 году на пересечении улиц Красного Маяка и Чертановской.
«Турбокольцо» отличается от кругового перекрёстка тем, что большинство направлений выводится по оптимальной траектории, с этим помогает направляющая разметка. По данным Центра организации дорожного движения (ЦОДД), на которые ссылается РБК, это позволит реализовать принцип, согласно которому те, кто едут направо, не должны перестраиваться (он действует на обычных перекрёстках).
На кольцах нового вида меньше «конфликтных точек», то есть мест, где водители могут не поделить дорогу. В итоге пропускная способность на этих участках предположительно увеличится на 20-30%. Следствием должно стать и сокращение числа ДТП на круговых перекрёстках.
В рамках эксперимента ЦОДД будет следить за ситуацией на таких перекрёстках в режиме реального времени с помощью камер. Чтобы новая разметка не стала неожиданностью для водителей, сообщения о приближении к «турбокольцу» появятся на информационных щитах. Помимо этого, сведения о круговом перёкрестке нового типа появятся в сервисе «Яндекс.Навигатор».
Чтобы новая разметка не стала неожиданностью для водителей, сообщения о приближении к «турбокольцу» появятся на информационных щитах. Помимо этого, сведения о круговом перёкрестке нового типа появятся в сервисе «Яндекс.Навигатор».
На самом деле «турбокольцо» в Москве не будет первым в России. Сейчас как минимум есть действующий объект в Чебоксарах (столица Чувашской республики). Движение по нему открыли ещё летом 2018 года. По словам администрации региона, это помогло увеличить пропускную способность на этом круговом перекрёстке. Проведение эксперимента в Москве, в случае успеха, распространит эту практику по всей стране.
На фото: «турбокольцо» в ЧебоксарахИзвестно, что больше всего «турбоколец» насчитывается в Нидерландах, Польше и Германии. Они есть и в других государствах Европы, в странах Северной и Южной Америки, а также в ЮАР. Власти Чувашии же взяли пример с республики Беларусь.
Напомним, правила проезда перекрёстков с круговым движением изменили в ноябре 2017 года. Был введён единый принцип «на круге – главный». Речь о том, что при отсутствии знаков приоритета те, кто въезжают на кольцо, должны уступать дорогу водителям, которые едут по нему. Такой принцип и раньше действовал во многих российских городах, но для этого устанавливался специальный знак, согласно которому, кольцо – это главная дорога.
Был введён единый принцип «на круге – главный». Речь о том, что при отсутствии знаков приоритета те, кто въезжают на кольцо, должны уступать дорогу водителям, которые едут по нему. Такой принцип и раньше действовал во многих российских городах, но для этого устанавливался специальный знак, согласно которому, кольцо – это главная дорога.
Это нововведение весной прошлого года пытался оспорить житель Калининграда, сославшийся на Венскую конвенцию о дорожном движении, которой новые российские ПДД якобы противоречат. Со своим иском он дошёл до Верховного суда, однако тот не нашёл несоответствий и признал нормы законными.
точек конфликта на пересечении | Как посчитать число?
Точки конфликта — это точки, в которых две машины потенциально могут столкнуться друг с другом. Мы можем определить количество конфликтных точек в зависимости от типа пересечения.
Дорожные маневры
Давайте разберемся, какие существуют различные типы транспортных маневров, которые помогут нам найти потенциальные конфликтные точки на перекрестке.
Тип конфликта может возникнуть из-за
расходится
Объединение
Переход
Ткачество
Пересекающий конфликт — серьезный конфликт и опасный, остальные — второстепенные конфликты.Плетение — это комбинация слияния и расхождения, обычно происходит при вращении.
Как нарисовать и узнать количество конфликтных точек?
Проведите перекресток; Затем нарисуйте движение с одной стороны дороги, затем с другой и так далее. В этом процессе отметьте точки конфликта
расхождения, слияния, пересечения и переплетения.Для трехстороннего перекрестка существует 9 конфликтов транспортных средств, как показано на рисунке выше.
Для 4-х стороннего перекрестка будет 24 конфликтов транспортных средств и 8 конфликтов пешеходов.
APSEd
APSEd — это платформа электронного обучения для гражданского строительства, разработанная выпускниками IIT-B. Получите доступ ко всему в одном месте!
Получите доступ ко всему в одном месте!
У нас учатся более 600 человек. Присоединяйтесь к ним и учитесь вместе с нами для оптимального обучения.
Привет! Я Адитья, соучредитель APSEd с Паланиаппаном.
Наш мозг может до определенной степени накапливать и запоминать вещи. Когда он перегружен, некоторые факты и формулы, которые вы запомнили, со временем исчезают.
Все становится проще, если мы понимаем концепцию и знаем, как ее применять. Это то, чего мы стремимся достичь с помощью наших курсов.
Наши курсы + ваши усилия = успехи на экзаменах!
На стандартном перекрестке с контролируемой остановкой или сигнализацией транспортные средства пересекают друг друга. Это создает сеть потенциальных столкновений, которые инженеры называют «точками конфликта».
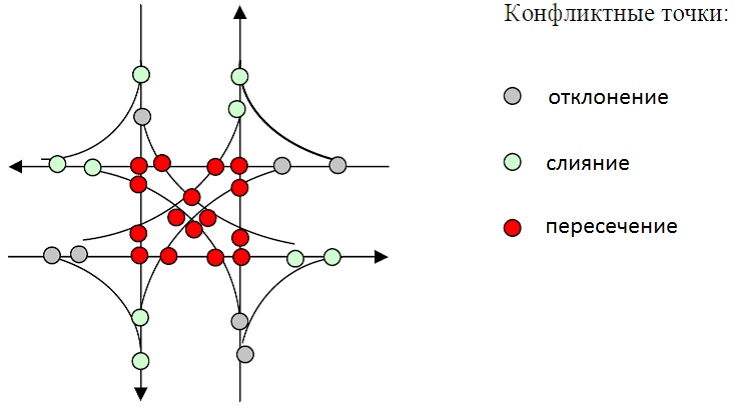
Эта диаграмма из Круговых перекрестков: информационное руководство, второе издание (опубликовано как отчет NCHRP 672) иллюстрирует разницу в конфликтных точках между обычным четырехсторонним перекрестком и эквивалентным однополосным перекрестком с круговым движением.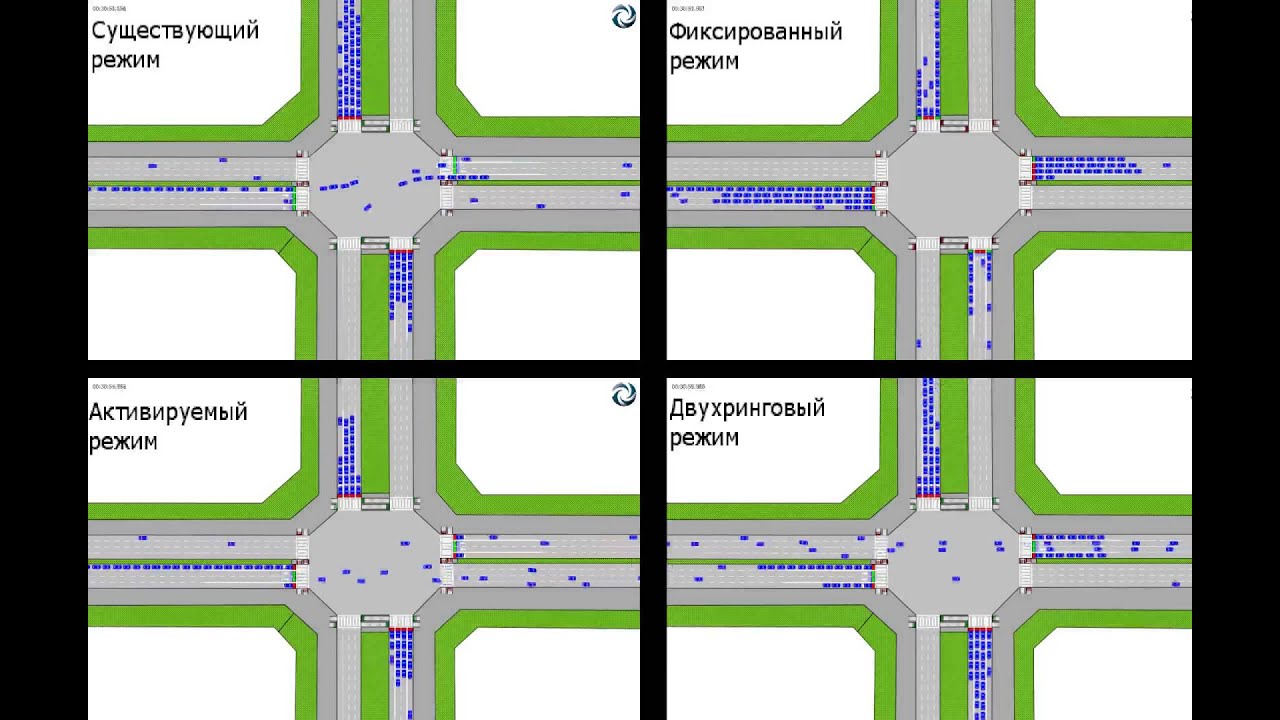 Есть 32 конфликтных точки, связанных с обычным перекрестком: 8 сливающихся (или соединяющихся), 8 расходящихся (или разделяющихся) и 16 пересекающихся. Напротив, на эквивалентном круговом перекрестке всего 8 точек конфликта — 4 слияния и 4 расходящихся. Мало того, что конфликтные точки уменьшаются вдвое с обходным движением, типы конфликтов, которые остаются, имеют одинаковое направление, что приводит к значительно меньшей серьезности и, как следствие, меньшей вероятности травм.
Есть 32 конфликтных точки, связанных с обычным перекрестком: 8 сливающихся (или соединяющихся), 8 расходящихся (или разделяющихся) и 16 пересекающихся. Напротив, на эквивалентном круговом перекрестке всего 8 точек конфликта — 4 слияния и 4 расходящихся. Мало того, что конфликтные точки уменьшаются вдвое с обходным движением, типы конфликтов, которые остаются, имеют одинаковое направление, что приводит к значительно меньшей серьезности и, как следствие, меньшей вероятности травм.Круговые перекрестки резко сокращают количество конфликтных точек:
- 4-полосные перекрестки имеют 32 конфликтных точки
- Однополосные кольцевые перекрестки имеют только восемь конфликтных точек .
«Часто в часы с высокой загруженностью шесть транспортных средств одновременно подъезжают к перекрестку [возле моего дома]», — сказал житель Колумбии Дэвис Коннетт. «Шестерым людям очень сложно договориться о порядке перехода, особенно когда водители не обращают внимания».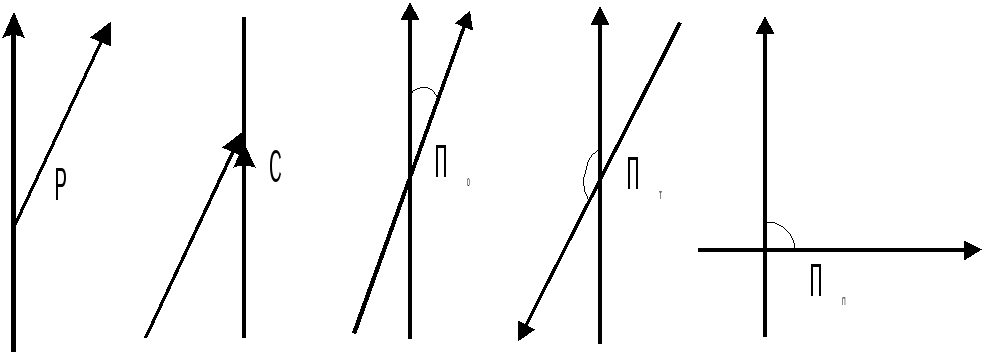
Согласно исследованию Федерального управления шоссейных дорог и Страхового института дорожной безопасности, круговое движение снижает количество аварий на 37 процентов, количество аварий с травмами на 75 процентов и количество аварий со смертельным исходом на 90 процентов.
Хотя никто не утверждает, что аварии не происходят на круговых перекрестках, природа этих столкновений сильно отличается. По данным Национальной администрации безопасности дорожного движения, с 2007 по 2011 год 63 американца в месяц умирали только в авариях на красный свет. Поскольку люди едут с круговым движением медленнее и не пытаются обогнать свет, большинство аварий менее серьезны.
«Круговые перекрестки обычно перемещают сходящийся транспортный поток через перекресток с более стабильной скоростью, чем знаки остановки и стоп-сигналы», — сказал Ричард Стоун, технический директор общественных работ.«Люди, как правило, просто текут более равномерно, вместо того, чтобы останавливаться и уходить».
Есть еще больше конфликтных точек, когда вы включаете немоторизованный транспорт, например пешеходов, велосипедистов и людей с ограниченными возможностями. Тогда на самом деле существует 56 конфликтных точек на четырехстороннем перекрестке по сравнению с 16 на кольцевом перекрестке. Фактически, использование кольцевых развязок сокращает столкновение с пешеходами на 40 процентов.
«Некоторые люди все еще могут расстраиваться из-за других водителей, которые могут или не могут правильно использовать круговую развязку», — сказал Стоун.«Главное — уступить дорогу автомобилистам, уже находящимся на кольцевой развязке, как если бы они ехали по прямой дороге».
Образовательные страницы: Видеоуроки: Ресурсы:
| Конфликтные точки на типичном двухполосном перекрестке с четырьмя полосами движения или проезжей части. | ||||||||||||||
 ..
.. ТРИЗ, также известная как теория решения изобретательских задач, представляет собой алгоритмический подход к решению технических проблем и генерации идей [Fey and Rivin, 2005].Части теории, используемые здесь, — это разрешение противоречий и закон идеальности. Обе теории направлены на разработку более совершенных систем, избегая конфликтов [Yang and Zhang, 2000]. Успех различных проектов перекрестков в рамках этой работы оценивается тремя способами. Во-первых, традиционные методы конфликтов трафика [USDOT] используются для определения количества и типа конфликтов трафика в системе. Во-вторых, рассматриваются функциональные требования и конструктивные параметры системы, а также обсуждаются изменения, внесенные в процессе перепроектирования перекрестка.Наконец, матрица гибридного проектирования, использующая как AD, так и теорию конфликта трафика, используется для определения характера связи в системе. Первый пример взят из серии примеров в Руководствах по городскому дизайну штата Айова.
ТРИЗ, также известная как теория решения изобретательских задач, представляет собой алгоритмический подход к решению технических проблем и генерации идей [Fey and Rivin, 2005].Части теории, используемые здесь, — это разрешение противоречий и закон идеальности. Обе теории направлены на разработку более совершенных систем, избегая конфликтов [Yang and Zhang, 2000]. Успех различных проектов перекрестков в рамках этой работы оценивается тремя способами. Во-первых, традиционные методы конфликтов трафика [USDOT] используются для определения количества и типа конфликтов трафика в системе. Во-вторых, рассматриваются функциональные требования и конструктивные параметры системы, а также обсуждаются изменения, внесенные в процессе перепроектирования перекрестка.Наконец, матрица гибридного проектирования, использующая как AD, так и теорию конфликта трафика, используется для определения характера связи в системе. Первый пример взят из серии примеров в Руководствах по городскому дизайну штата Айова. [SUDAS] Представлены три варианта перепроектирования типового нерегулируемого 4-стороннего перекрестка (рисунок 1) с использованием трех различных типов приподнятых медиан. Каждый вариант предназначен для уменьшения количества конфликтных точек на перекрестке. Для удобства предположим, что каждое пересечение выровнено по сторонам света (север, юг, восток и запад.Традиционные методы разрешения конфликтов выявляют 32 конфликта, связанных с типовым 4-полосным перекрестком. [SUDAS] В это число входят 16 пересечений, 8 расходящихся конфликтов и 8 конфликтов слияния. В части 1 этой работы мы продемонстрировали, что для этого перекрестка можно определить 12 функциональных требований, связанных с навигацией (рисунок 2), и построить гибридную матрицу проектирования (рисунок 3). На первом альтернативном перекрестке, представленном в руководстве по проектированию, используется непрерывная приподнятая медиана для разделения транспортных потоков восток-запад и запад-восток.Модернизированный перекресток позволяет каждой полосе движения выезжать или въезжать с .
[SUDAS] Представлены три варианта перепроектирования типового нерегулируемого 4-стороннего перекрестка (рисунок 1) с использованием трех различных типов приподнятых медиан. Каждый вариант предназначен для уменьшения количества конфликтных точек на перекрестке. Для удобства предположим, что каждое пересечение выровнено по сторонам света (север, юг, восток и запад.Традиционные методы разрешения конфликтов выявляют 32 конфликта, связанных с типовым 4-полосным перекрестком. [SUDAS] В это число входят 16 пересечений, 8 расходящихся конфликтов и 8 конфликтов слияния. В части 1 этой работы мы продемонстрировали, что для этого перекрестка можно определить 12 функциональных требований, связанных с навигацией (рисунок 2), и построить гибридную матрицу проектирования (рисунок 3). На первом альтернативном перекрестке, представленном в руководстве по проектированию, используется непрерывная приподнятая медиана для разделения транспортных потоков восток-запад и запад-восток.Модернизированный перекресток позволяет каждой полосе движения выезжать или въезжать с . ..
.. Для решения этой задачи авторы предлагают использовать хорошо откалиброванную имитационную модель и суррогатные меры безопасности вместо фактических данных о дорожном движении и полевой безопасности. В качестве испытательного стенда они использовали 5-ти перекрестный сегмент 3500 South, городской коридор в Солт-Лейк-Сити, Юта. Набор различных сценариев синхронизации сигналов (например, тайминги поля в сравнении с оптимизированными таймингами для фиксированных и задействованных операций контроллера) был протестирован с помощью GLOSA в имитационной модели VISSIM. После того, как файлы траектории движения транспортного средства извлечены из VISSIM, они подвергаются последующей обработке в суррогатной модели оценки безопасности (SSAM) FHWA для генерации различных конфликтов транспортных средств в качестве суррогатов показателей полевой безопасности.Результаты SSAM анализируются статистически, и делаются выводы. GLOSA уменьшает количество общих конфликтов, но только если время сигнала заранее определено (фиксировано).
Для решения этой задачи авторы предлагают использовать хорошо откалиброванную имитационную модель и суррогатные меры безопасности вместо фактических данных о дорожном движении и полевой безопасности. В качестве испытательного стенда они использовали 5-ти перекрестный сегмент 3500 South, городской коридор в Солт-Лейк-Сити, Юта. Набор различных сценариев синхронизации сигналов (например, тайминги поля в сравнении с оптимизированными таймингами для фиксированных и задействованных операций контроллера) был протестирован с помощью GLOSA в имитационной модели VISSIM. После того, как файлы траектории движения транспортного средства извлечены из VISSIM, они подвергаются последующей обработке в суррогатной модели оценки безопасности (SSAM) FHWA для генерации различных конфликтов транспортных средств в качестве суррогатов показателей полевой безопасности.Результаты SSAM анализируются статистически, и делаются выводы. GLOSA уменьшает количество общих конфликтов, но только если время сигнала заранее определено (фиксировано). Даже в этом случае преимущества более заметны, если также оптимизировать сигналы. GLOSA последовательно сокращает количество внутренних конфликтов и увеличивает количество конфликтов при смене полосы движения по сравнению со сценариями без GLOSA. Для многих сценариев синхронизации сигналов кажется, что лучше всего либо полностью применять GLOSA (100% степень проникновения), либо вообще не применять.Смешанный флот создает больше сбоев и конфликтов, чем «эксклюзивные» сценарии; это особенно актуально, если синхронизация сигнала не оптимальна. Когда дело касается потенциальной остроты конфликтов, GLOSA мало помогает. Количество конфликтов GLOSA с более высокой разницей в скоростях конфликтующих транспортных средств и количеством близких инцидентов выше, чем если бы GLOSA не применялась. GLOSA действительно перемещает конфликты дальше от перекрестков, что может быть связано с тем, что в сценариях GLOSA возникает больше конфликтов при смене полосы движения крейсерских транспортных средств.Дальнейшие исследования должны более тщательно изучить влияние GLOSA на различные конфликты транспортных средств.
Даже в этом случае преимущества более заметны, если также оптимизировать сигналы. GLOSA последовательно сокращает количество внутренних конфликтов и увеличивает количество конфликтов при смене полосы движения по сравнению со сценариями без GLOSA. Для многих сценариев синхронизации сигналов кажется, что лучше всего либо полностью применять GLOSA (100% степень проникновения), либо вообще не применять.Смешанный флот создает больше сбоев и конфликтов, чем «эксклюзивные» сценарии; это особенно актуально, если синхронизация сигнала не оптимальна. Когда дело касается потенциальной остроты конфликтов, GLOSA мало помогает. Количество конфликтов GLOSA с более высокой разницей в скоростях конфликтующих транспортных средств и количеством близких инцидентов выше, чем если бы GLOSA не применялась. GLOSA действительно перемещает конфликты дальше от перекрестков, что может быть связано с тем, что в сценариях GLOSA возникает больше конфликтов при смене полосы движения крейсерских транспортных средств.Дальнейшие исследования должны более тщательно изучить влияние GLOSA на различные конфликты транспортных средств.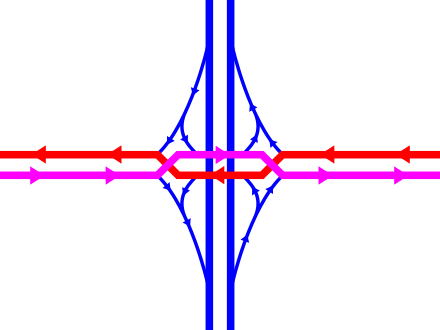 2 КЛЮЧЕВЫЕ СЛОВА Суррогатные меры безопасности; GLOSA, SSAM, Системы контроля скорости, Технология подключенных транспортных средств. ВВЕДЕНИЕ Один из способов уменьшить частые остановки и остановки движения по городским улицам — оптимизировать время сигнала (Barth, M., and Boriboonsomsin, K., 2008.). Совсем недавно новые методы оптимизации сигналов светофора включали изменения в поведение водителей для достижения оптимальной производительности на сигнальных перекрестках.Технология Connected Vehicles (CV) обеспечивает среду двусторонней беспроводной связи, обеспечивая связь между транспортными средствами и транспортными средствами с инфраструктурой, которые могут использоваться для различных приложений мобильности и безопасности. Одно из таких приложений называется GLOSA-Green Light Optimized Speed Advisory (Stevanovic et al., 2013.), которое представляет собой систему, которая использует своевременную и точную информацию о времени светофора и местонахождении светофора, чтобы направлять водителей (через связь между инфраструктурой и транспортным средством).
2 КЛЮЧЕВЫЕ СЛОВА Суррогатные меры безопасности; GLOSA, SSAM, Системы контроля скорости, Технология подключенных транспортных средств. ВВЕДЕНИЕ Один из способов уменьшить частые остановки и остановки движения по городским улицам — оптимизировать время сигнала (Barth, M., and Boriboonsomsin, K., 2008.). Совсем недавно новые методы оптимизации сигналов светофора включали изменения в поведение водителей для достижения оптимальной производительности на сигнальных перекрестках.Технология Connected Vehicles (CV) обеспечивает среду двусторонней беспроводной связи, обеспечивая связь между транспортными средствами и транспортными средствами с инфраструктурой, которые могут использоваться для различных приложений мобильности и безопасности. Одно из таких приложений называется GLOSA-Green Light Optimized Speed Advisory (Stevanovic et al., 2013.), которое представляет собой систему, которая использует своевременную и точную информацию о времени светофора и местонахождении светофора, чтобы направлять водителей (через связь между инфраструктурой и транспортным средством). ) с рекомендациями по скорости для более равномерной поездки с меньшим временем остановок на светофоре.Недавние результаты [2] показали, что система GLOSA работает эффективно только в том случае, если известно точное время начала и окончания зеленых фаз (например, возможно только с сигналами с фиксированным временем). Если в систему не поступает точная информация о времени (например, как в случае сработавших сигналов), или приблизительное время выхода из режима ожидания приблизительно соответствует историческим записям, системы GLOSA могут работать не оптимально. В то время как GLOSA и аналогичные подходы «Зеленый сигнал» или «Эко-сигнал» были протестированы на предмет их преимуществ в области мобильности и энергосбережения / эффективности (исследования GLOSA и другие, которые показывают преимущества с точки зрения задержки и расхода топлива ), влияние таких подходов на безопасность еще не исследовано.Известно, что хорошо скоординированные светофоры обеспечивают хорошее движение по основным транспортным потокам, тем самым сокращая количество необходимых остановок и вероятность наезда сзади.
) с рекомендациями по скорости для более равномерной поездки с меньшим временем остановок на светофоре.Недавние результаты [2] показали, что система GLOSA работает эффективно только в том случае, если известно точное время начала и окончания зеленых фаз (например, возможно только с сигналами с фиксированным временем). Если в систему не поступает точная информация о времени (например, как в случае сработавших сигналов), или приблизительное время выхода из режима ожидания приблизительно соответствует историческим записям, системы GLOSA могут работать не оптимально. В то время как GLOSA и аналогичные подходы «Зеленый сигнал» или «Эко-сигнал» были протестированы на предмет их преимуществ в области мобильности и энергосбережения / эффективности (исследования GLOSA и другие, которые показывают преимущества с точки зрения задержки и расхода топлива ), влияние таких подходов на безопасность еще не исследовано.Известно, что хорошо скоординированные светофоры обеспечивают хорошее движение по основным транспортным потокам, тем самым сокращая количество необходимых остановок и вероятность наезда сзади. Связь между частотой ДТП и потенциальными причинами относительно низка, даже если эти причины (например, погода, геометрический дизайн дорог и наличие рабочих зон) оказывают гораздо большее влияние на безопасность движения, чем время, установленное диспетчерами сигналов, и другие меры управления движением. Во-вторых, в отличие от других показателей трафика, которые отражают мобильность и топливную эффективность транспортных операций, воздействия на безопасность традиционно не оценивались с помощью инструментов моделирования.
Связь между частотой ДТП и потенциальными причинами относительно низка, даже если эти причины (например, погода, геометрический дизайн дорог и наличие рабочих зон) оказывают гораздо большее влияние на безопасность движения, чем время, установленное диспетчерами сигналов, и другие меры управления движением. Во-вторых, в отличие от других показателей трафика, которые отражают мобильность и топливную эффективность транспортных операций, воздействия на безопасность традиционно не оценивались с помощью инструментов моделирования.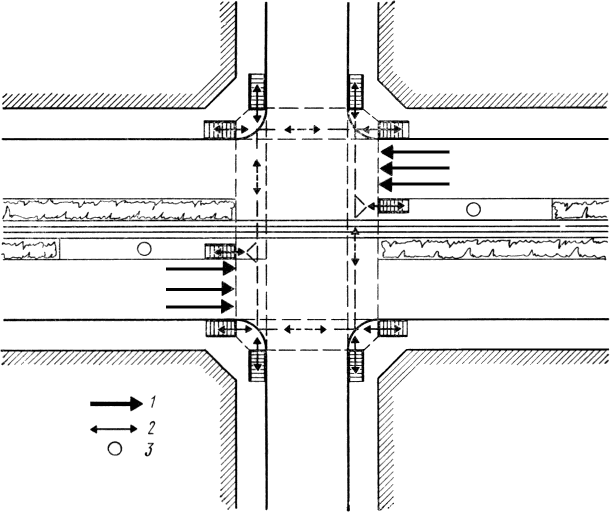
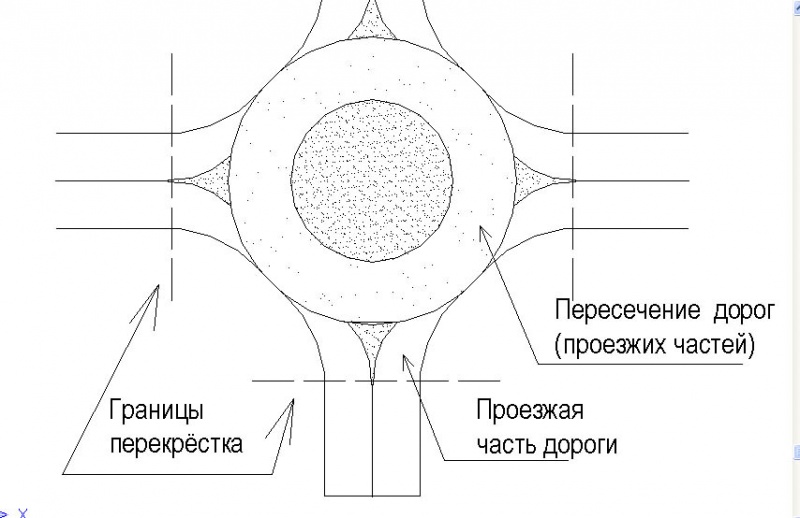 Поэтому мы представляем алгоритм скользящего горизонта, чтобы распространить этот метод на большее количество транспортных средств. Результаты показывают, что оптимальные назначения резервирования от AIM ∗ значительно сокращают задержки по сравнению с предыдущими протоколами. Кроме того, решения с подвижным горизонтом имеют задержки, аналогичные фиксированному горизонту, что обеспечивает эффективный метод реализации AIM ∗.
Поэтому мы представляем алгоритм скользящего горизонта, чтобы распространить этот метод на большее количество транспортных средств. Результаты показывают, что оптимальные назначения резервирования от AIM ∗ значительно сокращают задержки по сравнению с предыдущими протоколами. Кроме того, решения с подвижным горизонтом имеют задержки, аналогичные фиксированному горизонту, что обеспечивает эффективный метод реализации AIM ∗.
Что такое двойной круговой перекресток?
- Конструкция, в которой все съезды на автостраду начинаются или заканчиваются на одном из двух круговых перекрестков
- Кольцевые развязки представляют собой кольцевые развязки без сигналов, на которых движение движется против часовой стрелки вокруг центрального острова
Когда это следует учитывать?
- С тяжелым левым поворотом на съезды на автостраду
- Там, где между съездами на съездах имеется ограниченное пространство для автомобилей, ожидающих на светофоре
- На сильно загруженных развязках вне рамп, где автомобили имеют тенденцию выезжать на шоссе
Преимущества
- Повышенная безопасность: Уменьшает количество точек пересечения транспортных средств и устраняет вероятность столкновения под прямым углом и лобового столкновения
- Повышенная эффективность: Уменьшает задержку для трафика на рампе и устраняет координацию сигналов между двумя терминалами рампы
- Непрерывный поток: Конструкция с контролируемой доходностью сводит к минимуму резервное копирование на автостраде, снижая вероятность высокоскоростных задних аварий
- Экономически выгодно: Позволяет использовать более узкий мост, поскольку исключает минимум две полосы поворота.
Как перемещаться
Ниже показано, как ориентироваться на развязке с двойным круговым движением.Щелкните изображение, чтобы просмотреть его в увеличенном виде или посмотреть видео.
точек конфликта
Количество конфликтных точек (мест пересечения путей движения транспортных средств) — это показатель, который можно использовать для оценки безопасности инновационного перекрестка или развязки.
Есть три категории: пересечение, слияние и расхождение.
В целом, слияние и расхождение конфликтных точек, когда транспортные средства движутся в одном направлении, связаны с менее серьезными типами аварий, чем пересечение конфликтных точек, когда транспортные средства движутся в противоположных направлениях.
На приведенных ниже схемах сравниваются возможные движения транспортного средства и связанные с ними конфликтные точки на обычной ромбовидной развязке и на двойной кольцевой развязке.
Эти диаграммы представляют собой общий случай с одной полосой движения в каждом направлении и не учитывают движения пешеходов или велосипедистов на перекрестках или развязках.
По сравнению с обычной алмазной развязкой, двойная кольцевая развязка имеет на шесть меньше конфликтных точек.
Обычная алмазная биржа: точки конфликта
| |||||||||||||||
Двойной круговой перекресток: точки конфликта
| |||||||||||||||
Ресурсы
Департамент транспорта штата Вирджиния
Последнее изменение страницы: ноя. 17, 2020
17, 2020
Конфликты транспортных средств — Engineer-Educators.com
Однополосные круги с круговым движениемНа рисунке 5-1 представлена диаграмма точек конфликта транспортных средств для традиционного трехстороннего («Т») перекрестка и трехколесного перекрестка. . Как показано на рисунке, количество точек конфликта между транспортными средствами и транспортными средствами для круговых перекрестков уменьшается с девяти до шести для трехколесных перекрестков. Обратите внимание, что эти диаграммы не принимают во внимание возможность разделения конфликтов в пространстве (за счет использования отдельных полос левого или правого поворота) или во времени (за счет использования устройств управления движением, таких как знаки остановки или светофоры).
Приложение 5-1. Точки конфликта автомобилей на Т-образных перекрестках с однополосным подъездом. Приложение 5-2 представляет аналогичные диаграммы для традиционного четырехэтапного перекрестка («X» или «крест») и четырехколесного перекрестка с круговым движением.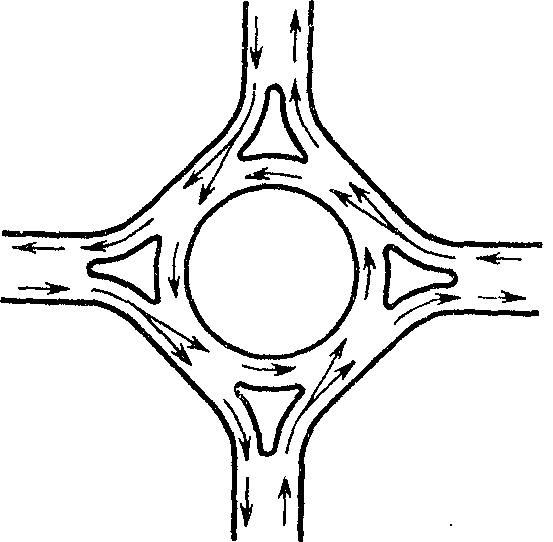 Как показано на рисунке, количество точек конфликта между транспортными средствами и транспортными средствами для перекрестков с круговым движением уменьшается с 32 до 8 для перекрестков с четырьмя ветками.
Как показано на рисунке, количество точек конфликта между транспортными средствами и транспортными средствами для перекрестков с круговым движением уменьшается с 32 до 8 для перекрестков с четырьмя ветками.
Конфликты можно разделить на три основные категории, степень серьезности которых варьируется, а именно:
- Конфликты в очередях. Эти конфликты вызваны автомобилем, который на подходе попадает в очередь за автомобилем. Конфликты такого типа могут возникать в конце очереди на проход или когда машины, поворачивающие налево, выстраиваются в очередь в ожидании пропусков. Эти конфликты обычно являются наименее серьезными из всех конфликтов, потому что столкновения затрагивают наиболее защищенные части транспортного средства, а относительная разница в скорости между транспортными средствами меньше, чем в других конфликтах.
- Конфликты слияния и расхождения. Эти конфликты вызваны объединением или разделением двух потоков трафика. Наиболее распространенные типы сбоев из-за конфликтов слияния — это боковые и задние аварии. Конфликты слияния могут быть более серьезными, чем конфликты расхождения, из-за более высокой вероятности столкновения с боковой стороной транспортного средства, которая обычно менее защищена, чем передняя и задняя части транспортного средства.
- Перекрестные конфликты. Эти конфликты вызваны пересечением двух транспортных потоков.Это самые серьезные конфликты из всех, которые, скорее всего, повлекут за собой травмы или смерть. Типичными типами столкновений являются крушения под прямым углом и лобовые столкновения.
 Эти конфликты вызваны объединением или разделением двух потоков трафика. Наиболее распространенные типы сбоев из-за конфликтов слияния — это боковые и задние аварии. Конфликты слияния могут быть более серьезными, чем конфликты расхождения, из-за более высокой вероятности столкновения с боковой стороной транспортного средства, которая обычно менее защищена, чем передняя и задняя части транспортного средства.
Эти конфликты вызваны объединением или разделением двух потоков трафика. Наиболее распространенные типы сбоев из-за конфликтов слияния — это боковые и задние аварии. Конфликты слияния могут быть более серьезными, чем конфликты расхождения, из-за более высокой вероятности столкновения с боковой стороной транспортного средства, которая обычно менее защищена, чем передняя и задняя части транспортного средства. Как показывают примеры 5-1 и 5-2, круговая развязка уменьшает конфликты транспортных средств как на трех-, так и на четырехколесных перекрестках, преобразуя все движения в правые повороты. Опять же, отдельные полосы поворота и управление движением (знаки остановки или сигнализация) часто могут уменьшить, но не устранить количество конфликтов на традиционном перекрестке, разделяя конфликты в пространстве и / или во времени. Однако наиболее серьезные аварии на сигнальных перекрестках происходят, когда происходит нарушение устройства управления дорожным движением, предназначенного для разделения конфликтов по времени (например, столкновение под прямым углом из-за проезда на красный свет и столкновения транспортного средства с пешеходом). Таким образом, было продемонстрировано, что возможность однополосных кольцевых развязок уменьшать конфликты за счет физических геометрических особенностей более эффективна, чем зависимость от устройств управления движением, подчиняющихся водителю.
Однако наиболее серьезные аварии на сигнальных перекрестках происходят, когда происходит нарушение устройства управления дорожным движением, предназначенного для разделения конфликтов по времени (например, столкновение под прямым углом из-за проезда на красный свет и столкновения транспортного средства с пешеходом). Таким образом, было продемонстрировано, что возможность однополосных кольцевых развязок уменьшать конфликты за счет физических геометрических особенностей более эффективна, чем зависимость от устройств управления движением, подчиняющихся водителю.
В целом, двухполосные круги с круговым движением имеют некоторые из тех же характеристик безопасности, что и их более простые однополосные аналоги.Однако из-за наличия дополнительных полос въезда и сопутствующей необходимости обеспечить более широкие объездные дороги и выездные проезды, двухполосные кольцевые развязки создают дополнительные конфликты, которых нет на однополосных круговых. Это делает важным использование минимально необходимого количества полос въезда, движения и выезда с учетом соображений пропускной способности. Например, согласно моделям дорожно-транспортных происшествий с круговым движением в Соединенном Королевстве, для 10 000 человек, входящих в среднесуточный трафик (ADT), расширение ширины въезда с одной до двух полос может увеличить количество ДТП с травмами на 25 процентов (8).
Это делает важным использование минимально необходимого количества полос въезда, движения и выезда с учетом соображений пропускной способности. Например, согласно моделям дорожно-транспортных происшествий с круговым движением в Соединенном Королевстве, для 10 000 человек, входящих в среднесуточный трафик (ADT), расширение ширины въезда с одной до двух полос может увеличить количество ДТП с травмами на 25 процентов (8).
Количество точек конфликтов для транспортных средств и пешеходов как на обычных перекрестках, так и на кольцевых развязках значительно возрастает, когда к ним добавляются дополнительные полосы подъезда. Дизайнеру рекомендуется графически определять конфликты для конкретного места, поскольку эта информация может повысить осведомленность о проблемах дизайна и может быть полезна в публичных презентациях.
Типы конфликтов, присутствующие на круговых перекрестках с несколькими полосами движения, которые не существуют на круговых перекрестках с одним движением, возникают, когда водители используют неправильную полосу движения или делают неправильный поворот. Эти типы конфликтов изображены на рис. 5-3 и 5-4 соответственно. Хотя эти типы конфликтов могут также присутствовать в других формах перекрестков, они могут быть распространены среди водителей, которые не знакомы с круговым движением. Конфликты, изображенные на Рисунке 5-4, в частности, могут быть созданы из-за отсутствия надлежащей геометрии конструкции, которая позволяет транспортным средствам двигаться бок о бок по всей кольцевой развязке (см. Главу 6). ДТП в результате обоих типов конфликтов также можно уменьшить за счет надлежащего обучения водителей.
Эти типы конфликтов изображены на рис. 5-3 и 5-4 соответственно. Хотя эти типы конфликтов могут также присутствовать в других формах перекрестков, они могут быть распространены среди водителей, которые не знакомы с круговым движением. Конфликты, изображенные на Рисунке 5-4, в частности, могут быть созданы из-за отсутствия надлежащей геометрии конструкции, которая позволяет транспортным средствам двигаться бок о бок по всей кольцевой развязке (см. Главу 6). ДТП в результате обоих типов конфликтов также можно уменьшить за счет надлежащего обучения водителей.
Как и в случае кольцевых развязок с однополосным движением, наиболее серьезные конфликты при пересечении транспортных средств устраняются и заменяются менее серьезными конфликтами при объединении.