Инструкции по созданию простых роботов своими руками:
Этот раздел сайта посвящен пошаговым инструкциям с фото и видео по созданию простых роботов их подручных материалов в домашних условиях. Как сделать простейшего beam робота или виброробота своими руками, схемы роботов для начинающих робототехников, основы и уроки робототехники для начинающих. Самый простой робот своими руками, как сделать простого робота в домашних условиях, поэтапные пошаговые схемы по сборке простейших beam (бим) и вибро роботов. Создание простого робота для детей или начинающих робототехников. Уроки робототехники для начинающих о том, как сделать очень простого робота дома в домашних условиях:
library_books Подборки: DIY: Подводный дрон с видеокамерой своими руками. Пошаговая инструкцияВ этой инструкции показано как сделать подводный дрон из пвх труб с управлением с помощью пульта и с видеокамерой на борту.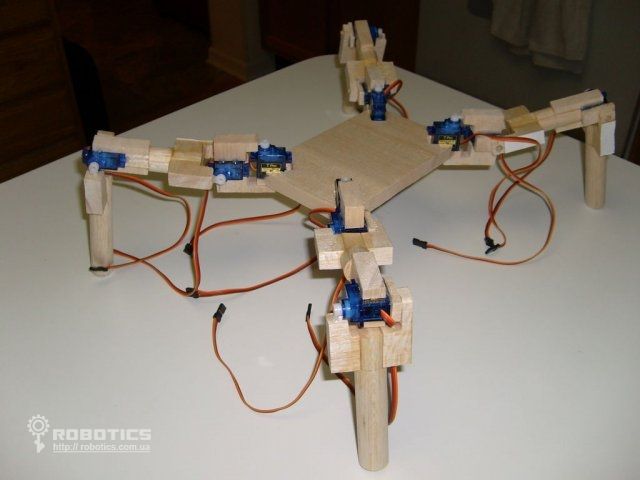
Доступно только зарегистрированным пользователям
schedule 27.05.2013 favorite_borderДоступно только зарегистрированным пользователям
DIY: Простейший робот Buck. Пошаговая инструкция по созданиюПредставляем вам очень простого робота по имени Buck. Принцип его работы похож на движения насекомых. С пружинистыми ногами робот создает немного шума при ходьбе. Мы поможем вам создать это милое устройство без особых усилий и денежных затрат…
schedule 27.05.2013 favorite_borderДоступно только зарегистрированным пользователям
schedule 27. 11.2012 favorite_border
11.2012 favorite_borderДоступно только зарегистрированным пользователям
DIY: Lobsterbot – простой робот на основе усилителя LM386. Пошаговая инструкция по созданиюПредставляем интересный механизм – робот Lobsterbot. Особенность данного устройства заключается в его простоте. Всё, что нужно для управления – это чип и реле. По принципу движения робот напоминает рака – отсюда и название: Lobsterbot. С помощью этого робота можно познать азы построения умных роботов, которые пригодятся для дальнейших исследований в области робототехники…
Доступно только зарегистрированным пользователям
DIY: Боевой мини-робот Battlebot. Пошаговая инструкция по созданиюБоевые роботы Battle Bot, как правило, довольно интересные и разнообразные.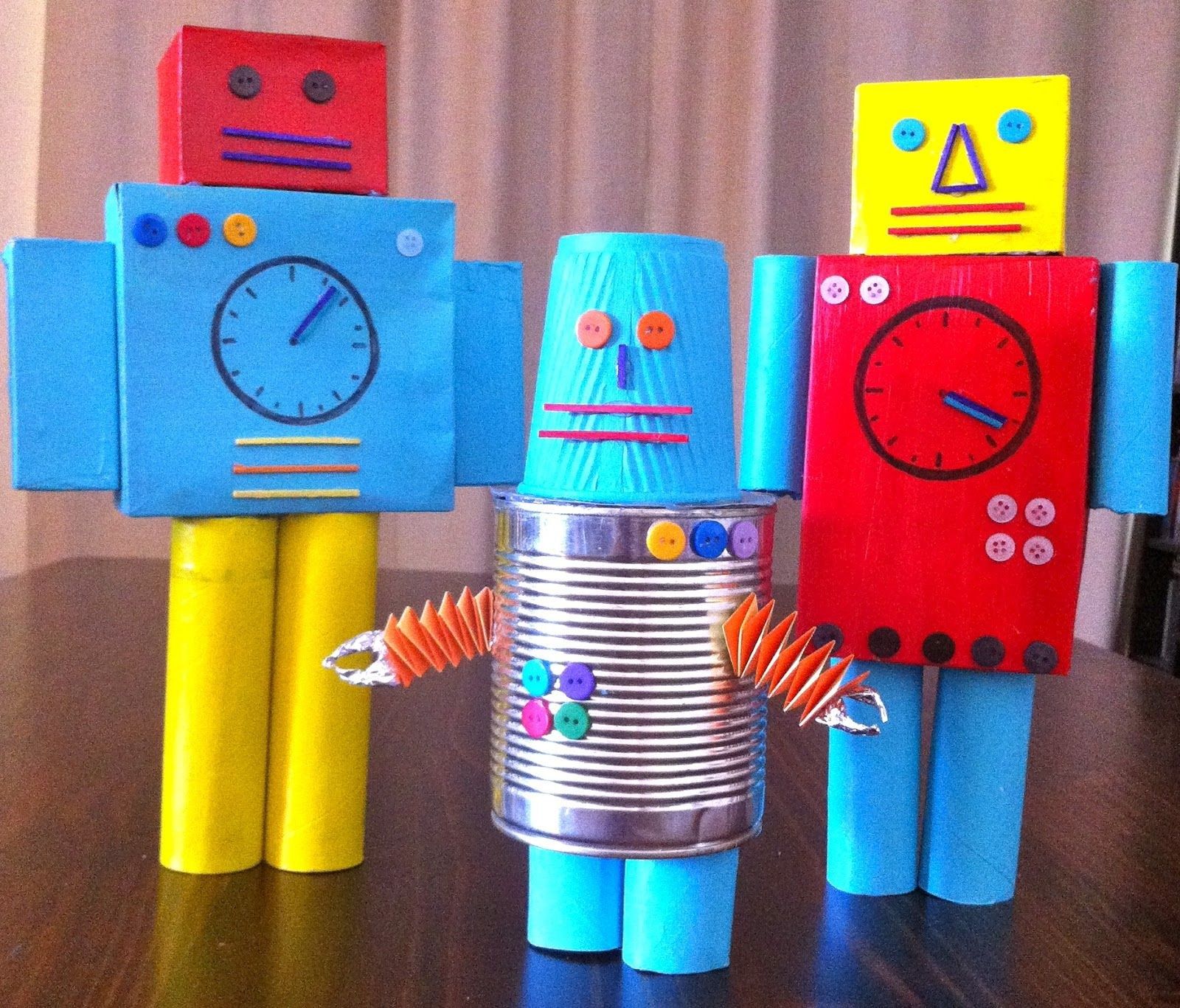 Мы представляем вам инструкцию одного мини-робота Battle Bot, который небольшой, очень легкий и простой в создании. Вы его можете собрать в любое свободное и удобное для вас время. Он не требует дорогостоящих деталей и инструментов. Так что, приступим…
Мы представляем вам инструкцию одного мини-робота Battle Bot, который небольшой, очень легкий и простой в создании. Вы его можете собрать в любое свободное и удобное для вас время. Он не требует дорогостоящих деталей и инструментов. Так что, приступим…
Доступно только зарегистрированным пользователям
DIY: Mousebot — простой робот из компьютерной мышки. Пошаговая инструкция по созданию Этот очень простой робот может быть сделан из недорогих материалов, которые можно купить в обычном магазине. Основой данного устройства является старая компьютерная мышка.Mousebot — простой бот реагирующий на свет и при столкновении со стеной способный двигаться назад и поворачивать в другую сторону. Данный проект является довольно дешевым, если у вас есть старая мышь в наличии… schedule 18. 10.2012 favorite_border
10.2012 favorite_borderДоступно только зарегистрированным пользователям
DIY: Bristlebot — простой светочувствительный виброробот. Пошаговая инструкция по созданиюЧто такое робот- bristlebot? Это вибрирующий робот, построенный на основе зубной щетки. Но если вас не устраивает такой простой вариант вибробота на зубной щетке, предлагаем добавить дополнительные особенности, которые не требуют ни дорогих технологий, ни программирования. Например, ваш робот смог бы реагировать на свет. Это достижимо с помощью специального сенсора…
Доступно только зарегистрированным пользователям
schedule 30.07.2012 favorite_borderДоступно только зарегистрированным пользователям
DIY: Трехголовый робот на основе из CD-диска. Пошаговая инструкция по созданию
Пошаговая инструкция по созданиюМы не раз уже писали о роботах, построенных на основе зубной щетки. Но этот интересный робот заинтересует любого желающего попробовать свои силы в построении самодельных домашних роботов. Его создание может занять всего пару часов. Для этого нужно сосредоточиться на деле и следовать инструкции. Робота должна проводиться в хорошо проветриваемом помещении…
schedule 25.07.2012 favorite_borderДоступно только зарегистрированным пользователям
DIY: Легкий виброробот из старого фотоаппарата. Пошаговая инструкция по созданиюДля того, чтобы создать виброробота не обязательно нужны зубные щетки. Эти устройства создаются легко из старых нерабочих вещей, как например, фотоаппарат. Кроме фотоаппарата для построения робота понадобится немного скотча и несколько долларов. Если у вас есть старый поломанный и ненужный фотоаппарат, можете смело приступать к конструкции этого робота.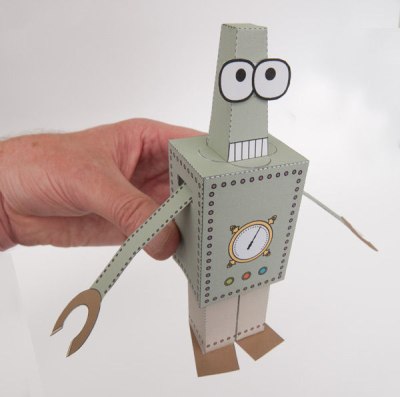
Доступно только зарегистрированным пользователям
DIY: Вибрирующий робот-насекомое из жестяной банки. Пошаговая инструкция по созданиюПредставляем вам вибрирующий робот на основе жестяной банки из-под газированного напитка, который гудит, как насекомое и двигается сам по себе. Легкая конструкция с множеством возможностей для детей, чтобы научиться делать робота самостоятельно. Этот виброробот очень хорошо работает на кафельном полу, где он следует и опирается на плитке, когда его нога застревает в щели. В зависимости от того, насколько он сбалансирован, он будет двигаться по комнате, и станет отличной забавой для молодежи…
schedule 24.07.2012 favorite_borderДоступно только зарегистрированным пользователям
В этом разделе вы можете найти схемы и собрать простого робота, маленьких простейших роботов, иными словами этот раздел это робототехника для начинающих своим руками в домашних условиях. Простые роботы своими руками, beam роботы для начинающих, вибророботы из подручных средств дома. Пошаговые поэтапные инструкции с фото и видео процесса сборки самодельного простого робота в домашних условиях. Как сделать самый простой робот своими руками, создание просто простого робота для детей, собрать простейшего робота из хлама дома самостоятельно.
Простые роботы своими руками, beam роботы для начинающих, вибророботы из подручных средств дома. Пошаговые поэтапные инструкции с фото и видео процесса сборки самодельного простого робота в домашних условиях. Как сделать самый простой робот своими руками, создание просто простого робота для детей, собрать простейшего робота из хлама дома самостоятельно.
Так же здесь есть инструкции по сборке beam роботов (бим роботов) и вибророботов своими руками. Описание процесса создания простейших роботов, фото и видео инструкции по о том как начать делать простого робота.
Смотреть инструкции и схемы очень простых роботов, которых можно сделать в домашних условиях из подручных материалов. Очень простые и самые простые роботы для самостоятельного изготовления. Делаем простейшего робота дома в домашних условиях своими руками.
Пошаговые инструкции и схемы по созданию роботов своими руками:
В данном разделе сайта вы найдете подробные инструкции по сборке роботов своими руками в мастерской или даже у себя дома. Увидите фото и видеоинструкции,помогающие в домашних условиях собственноручно создать различные модели роботов. Прилагаются простые и понятные обывателю схемы и чертежи, для того чтобы самостоятельно осваивать это увлекательное и полезное занятие. Благодаря нашим фото и видео урокам вы научитесь проектировать и конструировать разнообразные модели робототехники,в том числе управляемых роботов и прочее. Все это в разделе с пошаговыми инструкциями по проектированию и сборке роботов своими руками.
Увидите фото и видеоинструкции,помогающие в домашних условиях собственноручно создать различные модели роботов. Прилагаются простые и понятные обывателю схемы и чертежи, для того чтобы самостоятельно осваивать это увлекательное и полезное занятие. Благодаря нашим фото и видео урокам вы научитесь проектировать и конструировать разнообразные модели робототехники,в том числе управляемых роботов и прочее. Все это в разделе с пошаговыми инструкциями по проектированию и сборке роботов своими руками.
В этой инструкции показано как сделать подводный дрон из пвх труб с управлением с помощью пульта и с видеокамерой на борту. Достаточно легкий в изготовлении робот, не требующий никаких дорогостоящих комплектующих. Попробуйте сделать такого робота самостоятельно. Смотрите подробности…
schedule 26. 09.2018 favorite_border
09.2018 favorite_borderДоступно только зарегистрированным пользователям
DIY: Настоящий робот дроид BB-8 под Arduino. Пошаговая инструкция по созданиюВозможно ли построить дроида ВВ8 в домашних условиях из подручных материалов? Воспользуйтесь нашей пошаговой инструкцией, чтобы создать звездного робота своими руками. В данной инструкции мы покажем вам как построить своими руками известного дроида ВВ-8 ростом в натуральную величину, под управлением arduino и смартфона…
Доступно только зарегистрированным пользователям
schedule 05.01.2017 favorite_borderДоступно только зарегистрированным пользователям
schedule 27. 10.2016 favorite_border
10.2016 favorite_borderДоступно только зарегистрированным пользователям
DIY: Подталкиватель мышки на LEGO Mindstorms. Пошаговая инструкция по изготовлениюВ данной инструкции мы хотим поделиться с вами навыками построения робота на основе комплекта Mindstorm, который двигает вашу компьютерную мышь. Вам наверняка интересно узнать, зачем нужно использовать такую дорогую вещь для такой простой задачи? Цель этого робота – уберечь ваш компьютер в спящем режиме без изменения настроек. Да, кажется, это совершенно бесполезный предмет, но это весело, убедитесь сами…
schedule 23.03.2015 favorite_borderДоступно только зарегистрированным пользователям
DIY: Несложный робот пылесос под Arduino своими руками. Пошаговая инструкция по изготовлениюПопулярность автоматизированных домашних уборщиков с каждым днем возрастает.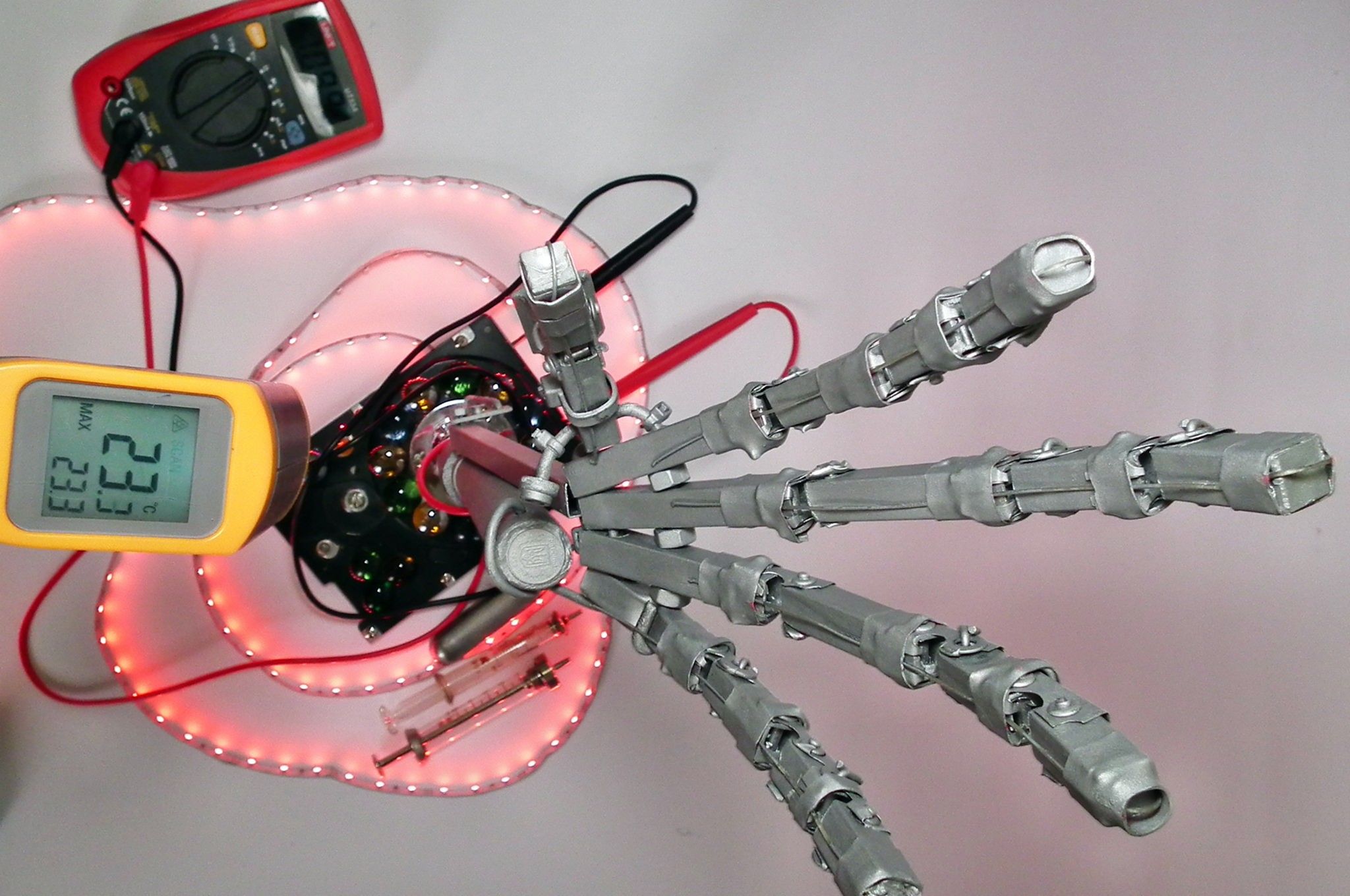 Не исключение, роботы-пылесосы для сухой уборки, способные поддерживать чистоту пола без вашего вмешательства. Если вы хотите узнать, как он устроен и построить его собственными руками, представляем вашему вниманию инструкцию по сборке простейшего робота-пылесоса из подручных средств…
Не исключение, роботы-пылесосы для сухой уборки, способные поддерживать чистоту пола без вашего вмешательства. Если вы хотите узнать, как он устроен и построить его собственными руками, представляем вашему вниманию инструкцию по сборке простейшего робота-пылесоса из подручных средств…
Доступно только зарегистрированным пользователям
DIY: Коробочка самовыключатель под управлением Arduino. Пошаговая инструкция по созданиюЭто руководство — как построить еще один бесполезный робот, который предназначен скорее для развлечения, чем для решения логических задач. Игрушка в виде коробочки с тумблером и открывающейся створкой, заключает в себе ряд механических элементов и блок управления на основе Arduino. Для удобства представляем вам 9 шагов для более детального подхода к сборке. Что из этого получиться увидим, когда соберем эту игрушку у себя дома. ..
..
Доступно только зарегистрированным пользователям
DIY: Роботизированная рука на базе LEGO Mindstorm NXT. Пошаговая инструкция по созданиюВ данной инструкции мы расскажем вам, как можно построить самостоятельно роботизированную руку с комплектом Lego Mindstorms NXT. На самом деле, в этой инструкции автор хотел сделать штатив для своей камеры. Но это оказалось трудным заданием. После нескольких экспериментов автору удалось сделать простую роботизированную руку…
schedule 21.01.2014 favorite_borderДоступно только зарегистрированным пользователям
DIY: Простой робот паук на Arduino и Fischertechnik. Пошаговая инструкция по созданиюЕсли вам нужен проект, который будет использовать все свои сервоприводы и механизмы движения, вы можете создать простого робота-паука.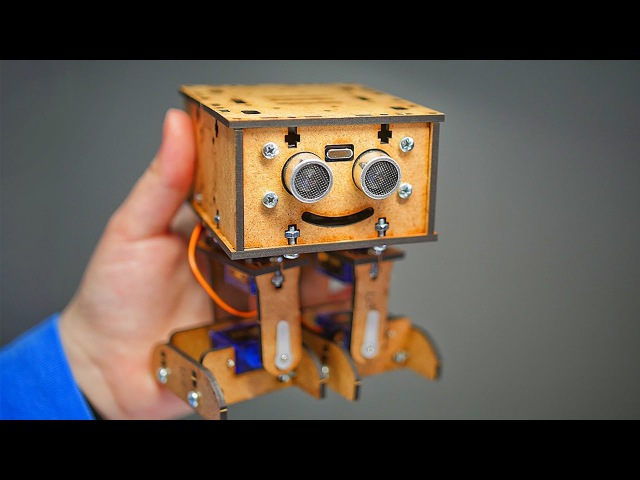 Если у вас есть навыки работы с техникой Fischertechnik, LEGO и K’NEX и лишние сервоприводы, этот проект для Вас. Действительно, этот паук с нелепыми движениями является большой обучающей платформой. Основной целью этого проекта является обучение основам работы сервоприводов, их синхронизации, программированию и пониманию диапазона и силы. Результат будет очень забавным…
Если у вас есть навыки работы с техникой Fischertechnik, LEGO и K’NEX и лишние сервоприводы, этот проект для Вас. Действительно, этот паук с нелепыми движениями является большой обучающей платформой. Основной целью этого проекта является обучение основам работы сервоприводов, их синхронизации, программированию и пониманию диапазона и силы. Результат будет очень забавным…
Доступно только зарегистрированным пользователям
DIY: Sneel — плавающий робот-змея под Arduino. Пошаговая инструкция по созданиюSneel является роботом-змеей, который построенный для изучения живых, извилистых движений роботов в водной среде. Он предназначен для перемещения в неизвестной территории и экстремальной местности. Sneel является биомиметическим, мобильным, водным роботом с открытым исходным кодом. Электромеханическая конструкция Sneel имитирует структуру и движения реальной водяной змеи, чтобы исследовать поведение линейных роботов во время плавания. Представляем вам подробнейшую пошаговую инструкцию по его изготовлению…
Представляем вам подробнейшую пошаговую инструкцию по его изготовлению…
Доступно только зарегистрированным пользователям
schedule 29.05.2013 favorite_borderДоступно только зарегистрированным пользователям
DIY: Гигантский картонный робот-манипулятор. Пошаговая инструкция по созданиюПредставляем вам картонного огромного робота, контролируемого компьютером, рука которого достигает 6 футов. Он состоит из двух конфигураций: 1) рука с захватом – трехпалый захват, который позволяет подбирать игрушки и грязные носки с пола без необходимости нагибаться. Возможность сохранения пути руки позволяет пользователям принимать те же движения с помощью камеры, снятые с точностью и способностью повторного воспроизведения. 2) Кран с камерой — камера с телефона позволяет делать фантастические изображения за мимолетный промежуток времени и видео-съемку…
2) Кран с камерой — камера с телефона позволяет делать фантастические изображения за мимолетный промежуток времени и видео-съемку…
Доступно только зарегистрированным пользователям
Раздел посвящен схемам создания и изготовления роботов своими руками. Все описано подробно, шаг за шагом, весь процесс создания робота или беспилотника. Хотели бы Вы знать, как сделать квадрокоптер своими руками? У нас вы найдете фото и видео инструкции по этому процессу с подробным описанием каждого шага. Каждый пользователь, приложив достаточно усилий и терпения, с нашей помощью сможет создать проект по сборке беспилотника (дрона), своими руками собрать его из подручных материалов, и запрограммировать его. Смотрите полезные видео вех этих процессов, читайте наши советы и рекомендации, и создавайте роботов самостоятельно своими руками!
Могли бы вы еще недавно себе представить, что сделать робота у себя дома самому будет в принципе возможно? И что это окажется так доступно и просто описано, что процесс сборки будет чем-то увлекательным и веселым? Сегодня мы докажем вам, что это просто. Все подробные инструкции, фото и видео материалы для создания квадрокоптеров / дронов / беспилотников и роботов вы найдете в разделе нашего сайта «Сделай сам».
Все подробные инструкции, фото и видео материалы для создания квадрокоптеров / дронов / беспилотников и роботов вы найдете в разделе нашего сайта «Сделай сам».
Как сделать робота, Робот своими руками, Самодельные роботы
Любители электроники, люди интересующиеся робототехникой не упускают возможность самостоятельно сконструировать простого или сложного робота, насладиться самим процессом сборки и результатом.
Не всегда есть время и желание на уборку дома, но современные технологию позволяют создавать роботов уборщиков. К таковым можно отнести робота пылесоса, который ездит часами по комнатам и собирает пыль.
С чего начать если возникло желание создать робота своими руками? Конечно же первые роботы должны быть просты в создании. Робот, о котором пойдет речь в сегодняшней статье, не займет много времени и не требует особых навыков.
Продолжая тему создание роботов своими руками, предлагаю попробовать сделать танцующего робота из подручных средств. Для создания робота своими руками потребуются простые материалы, которые найдутся наверное практически в каждом доме.
Для создания робота своими руками потребуются простые материалы, которые найдутся наверное практически в каждом доме.
Разнообразие роботов не ограничивается конкретными шаблонами, по которым эти роботы создаются. Людям постоянно приходят в голову оригинальные интересные идеи, как сделать робота. Одни создают статичные скульптуры роботов, другие создают динамичные скульптуры роботов, о чем и пойдет речь в сегодняшней статье.
Сделать робота своими руками может любой, даже ребенок. Робот, описание которого пойдет ниже, прост в создании и не требует много времени. Попробую привести описание этапов создания робота своими руками.
Думаю многие видели рекламу одного из известных браузеров, в которой простенький робот крутясь рисовал цветными фломастерами неразборчивые фигуры. Предлагаю вам попробовать сделать подобного робота своими руками. На создание робота уйдет не так много времени и усилий.
Порой идеи создания робота приходят совсем неожиданно. Если поразмышлять на тему, как заставить робота из подручных средств двигаться, возникает мысль о батарейках. Но, что если всё гораздо проще и доступнее? Давайте попробуем сделать робота своими руками используя мобильный телефон в качестве основной детали. Для создания вибро робота своими руками понадобятся следующие материалы:
Создать робота своими руками можно из чего угодно. К примеру, робот Belvedere, автором которого является Andrew Wolff, сделан на основе робота пылесоса. Основное применение робота заключается в том, чтобы робот развлекал семью Andrew и гостей.
Зная принципы создания роботов из подручных средств, любой желающий, даже ребенок сможет смастерить простенького робота. К примеру, робот из компакт диска о котором будет говориться в данной статье, сделан именно ребенком.
Как сделать робота своими руками в домашних условиях?
Компания Google осуществила детскую мечту многих людей и создала конструктор, из которого можно самостоятельно собрать робота. Причем речь идет не о безделушке с мотором и парой лампочек, потому что при должном старании конструктор будет обладать чем-то вроде искусственного интеллекта. Корпус робота можно сделать из бумаги, причем схема доступна бесплатно и ее нужно просто распечатать, вырезать и собрать. На начальном этапе программировать тоже не нужно, потому что исходный код тоже можно скачать. Правда для робота нужно будет купить «мозг» и специальное устройство, чтобы он мог обучаться новым командам. Выглядит так, что сборка робота займет много времени, но компания позиционирует свой конструктор как нечто простое и быстрое в освоении. Давайте изучим новую идею Google и выясним, насколько это правда?
Причем речь идет не о безделушке с мотором и парой лампочек, потому что при должном старании конструктор будет обладать чем-то вроде искусственного интеллекта. Корпус робота можно сделать из бумаги, причем схема доступна бесплатно и ее нужно просто распечатать, вырезать и собрать. На начальном этапе программировать тоже не нужно, потому что исходный код тоже можно скачать. Правда для робота нужно будет купить «мозг» и специальное устройство, чтобы он мог обучаться новым командам. Выглядит так, что сборка робота займет много времени, но компания позиционирует свой конструктор как нечто простое и быстрое в освоении. Давайте изучим новую идею Google и выясним, насколько это правда?
Робот ALTO, которого можно собрать самому
Робот с искусственным интеллектом своими руками
Конструктор был представлен подразделением Google Creative Lab. Робот называется ALTO, что является сокращением от «A Little Teachable Object» (маленький обучаемый объект). Проект создан для того, чтобы люди смогли собрать робота на дому и получили базовые знания о машинном обучении. Машинным обучением называется умение искусственного интеллекта самостоятельно вырабатывать навыки выполнения новых задач. В ходе сборки робота ALTO, люди должны понять, как научить робота самостоятельно понимать и выполнять задачи. По крайней мере, компания Google на это надеется.
Машинным обучением называется умение искусственного интеллекта самостоятельно вырабатывать навыки выполнения новых задач. В ходе сборки робота ALTO, люди должны понять, как научить робота самостоятельно понимать и выполнять задачи. По крайней мере, компания Google на это надеется.
Интересный факт: ученые уверены, что в будущем большую часть ручного труда будут выполнять роботы. Чтобы не остаться без работы, людям необходимо уже сейчас изучать программирование, ведь роботами должен кто-то управлять. Так что знать, что такое машинное обучение и как оно работает, важно всем. И робот ALTO, возможно, сможет быстро ознакомить людей с этой темой.
Схема для создания корпуса робота из бумаги и исходный код программы для его работы можно найти на сайте Experiments with Google (кнопка Get the code). Но это еще не все, потому что для создания робота нужна электроника, которую нужно купить:
- Coral USB Accelerator — это устройство, которое включает в себя процессор Edge TPU.
 Он нужен для того, чтобы робот обладал способностью к машинному обучению. Его можно купить на Aliexpress;
Он нужен для того, чтобы робот обладал способностью к машинному обучению. Его можно купить на Aliexpress; - Raspberry Pi 4 — небольшой компьютер размером с банковскую карту. К нему можно будет подключить камеру, динамики и прочее оборудование, нужное для робота. Он тоже есть на Aliexpress.
 Он нужен для того, чтобы робот обладал способностью к машинному обучению. Его можно купить на Aliexpress;
Он нужен для того, чтобы робот обладал способностью к машинному обучению. Его можно купить на Aliexpress;Coral USB Accelerator и Raspberry Pi 4
Знаете ли вы, что роботов можно создавать даже изо льда? Посмотреть на такого робота можно по этой ссылке.
Программирование робота
Для обучения робота нужно будет использовать платформу TensorFlow, которая включает в себя инструменты для тренировки нейронных сетей (можно сказать, для создания искусственного интеллекта). Звучит сложно, да и цена устройства Coral USB Accelerator и компьютера Raspberry Pi 4 может озадачить. Но ведь речь идет о достаточно серьезном устройстве, в ходе создания которого человек получает навыки, которые могут пригодиться ему в высокотехнологичном будущем. Знание английского тоже обязательно, потому что инструкция по сборке робота ALTO и его настройке выложены на GitHub и не переведены на русский.
Знание английского тоже обязательно, потому что инструкция по сборке робота ALTO и его настройке выложены на GitHub и не переведены на русский.
Робот ALTO может распознавать предметы и многое другое — главное, научить его этому
Представители Google считают, что робота можно научить выполнению самых разных задач. Самая простая из них — распознавание предметов. Если перед камерой робота поставить яблоко, он может поднять левую руку. А если поставить банан — правую. Это только самые банальные примеры, а на деле, полученные в ходе сборки робота знания, должны помочь в создании более навороченных устройств. Глядишь, кто-нибудь сможет даже разработать собственный робот-пылесос или создать охранную систему с распознаванием лиц.
Если вам интересны новости науки и технологий, подпишитесь на наш канал в Яндекс.Дзен. Там вы найдете материалы, которые не были опубликованы на сайте!
Многие люди ассоциируют будущее именно с роботами. Считается, что когда-нибудь они смогут ходить по улицам наравне с людьми и это будет вполне привычным явлением. На данный момент на улицах можно встретить разве что роботов-курьеров, и то редко. Одного из самых интересных роботов для доставки посылок недавно представила компания Hyundai. Он стал очень обсуждаемым — в чем заключается его главная особенность, можно почитать в этом материале.
На данный момент на улицах можно встретить разве что роботов-курьеров, и то редко. Одного из самых интересных роботов для доставки посылок недавно представила компания Hyundai. Он стал очень обсуждаемым — в чем заключается его главная особенность, можно почитать в этом материале.
Робот Своими Руками В Домашних Условиях | Мир робототехники
Пошаговые инструкции по созданию простейших роботов
КЛУБТРАВЕЛ / info / Простой робот как сделать | Просмотров: 38194 | #79075
Схемы простых вибророботов для начинающих роботостроителей. Как сделать простого робота из подручных средств своими руками. Там пояснения не очень понятные. Интересную статейку накопал про то, как сделать самому из простых запчастей робота. Людям постоянно приходят в голову оригинальные интересные идеи, как сделать робота. Подробные пошаговые инструкции по сборке простых роботов для. Сделать робота можно, Iy, простой робот, виброробот — простейшие роботы — robotics. Пультоид — это простой робот, Чтобы сделать их аккуратнее и отделить спаянные соединения, так чтобы. Как сделать робота своими руками из подручных средств прямо у себя дома. В этом проекте мы опишем, как сделать простого, пневматического мягкого робота, который сделан из силиконовой резины, и формы с.
Как сделать простого робота из подручных средств своими руками. Там пояснения не очень понятные. Интересную статейку накопал про то, как сделать самому из простых запчастей робота. Людям постоянно приходят в голову оригинальные интересные идеи, как сделать робота. Подробные пошаговые инструкции по сборке простых роботов для. Сделать робота можно, Iy, простой робот, виброробот — простейшие роботы — robotics. Пультоид — это простой робот, Чтобы сделать их аккуратнее и отделить спаянные соединения, так чтобы. Как сделать робота своими руками из подручных средств прямо у себя дома. В этом проекте мы опишем, как сделать простого, пневматического мягкого робота, который сделан из силиконовой резины, и формы с.
Как скоро два фотосенсора воспринимают отраженный от белоснежного поля свет, бот перемещается вперед.
- Схемы простых вибророботов для начинающих роботостроителей. Как сделать простого робота из подручных средств своими руками.
- Как сделать робота своими руками из подручных средств прямо у себя дома. Подробные пошаговые инструкции по сборке простых роботов для.
- Представляем вам очень простого робота по имени buck. Чтобы сделать их аккуратнее и отделить спаянные соединения, так чтобы.
- Iy, простой робот, виброробот — простейшие роботы — robotics. Для робота в перекрестной форме вам нужно сделать два полукруга.
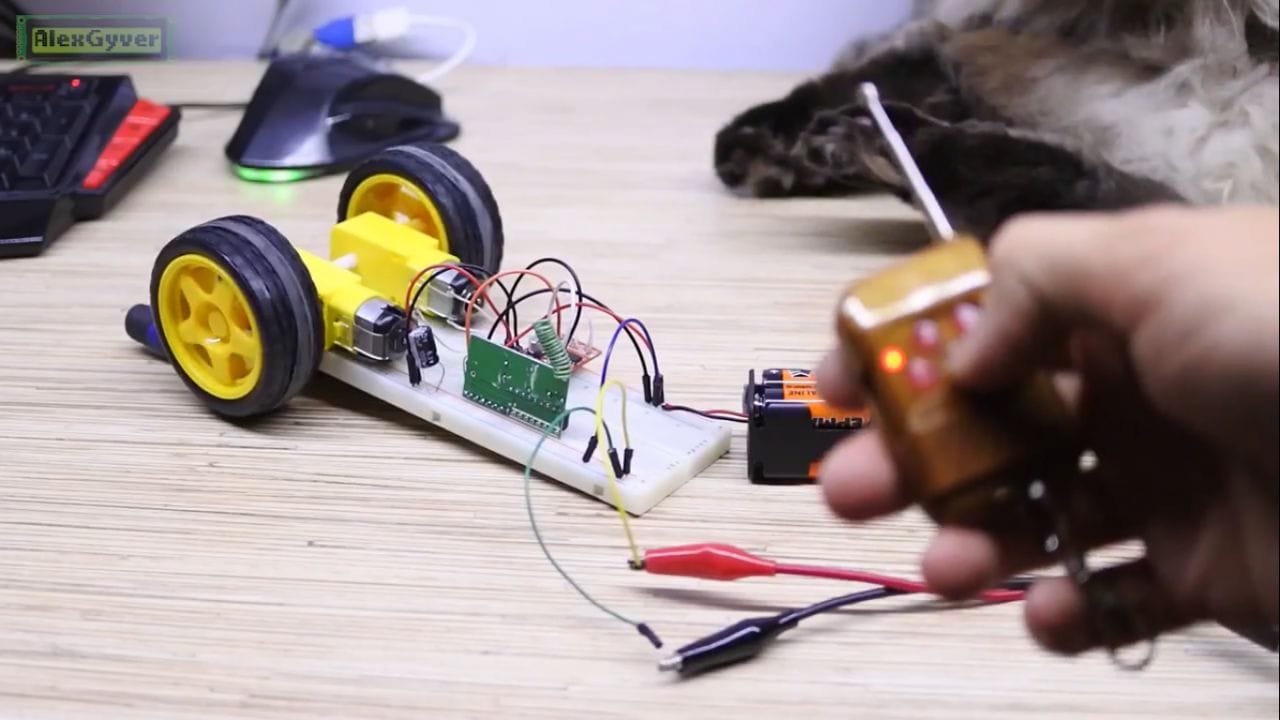
- Пультоид — это простой робот, которым можно управлять с помощью любого пульта дистанционного управления, например от телевизора.
- Сделать робота можно, используя лишь одну микросхему драйвера моторов и пару фотоэлементов. В зависимости от способа соединения моторов.

Отсель прием манёвра содержащийся в неизменном повороте влево-вправо, по извилистой линии движения электрическая схемам бота максимально обычная и сочиняет всего 2 транзистора и немного маленьких доп радиокомпонентов.
Выключение как уже я сказал повыше случается механически по прошествии некоего времени. Соединения меж составляющими можнож исполнять различными методами, к примеру при помощи паяльничка или же термоплавкого клея или же конкретной скруткой. Конкретнее о работе с драйвером движков можнож прочесть в предшествующей заметке дабы скомпенсировать проходящий через фототранзистор ток, в схему введен резистор r1, номинал которого возможно подобрать в пределах 200 ом Простой робот как сделать. ). Взамен букв vcc нередко сообщают 5v, демонстрируя этим напряжение источника кормления. Номинал данных резисторов возможно подобрать в пределах 4, 7 ком .
Как скоро на фототранзистор ptr1 свалится луч света, то на входе input1 микросхемы драйвера движков покажется полезный сигнал и двигатель m1 начнет вертеться. Представляет из себя бота оснащённого одним либо несколькими светодиодами, которые справляются согласно с установленным методом.
Возможно обойтись как говорится в отсутствии выключателя и лишь скручивать электропровода, дабы бот отправился. Светодиод гораздо лучше подключить через сдерживающий резистор 20#151 50 ом и устроить его повторяющий вид фары, спереди. В самом конце заметки станет видео, а покуда я проведу ряд замечаний, которые были замечены в ходе моей работы над системой. Все абсолютно трудоспособно, и простора для фантазии хоть убавляй. Нежели поближе световое пятнышко к боту, тем прытче он станет передвигаться ичем далее, тем медлительнее его манёвр по плоскости. На всех рисунках роботов микросхема драйвера движков l293d показана символически (лишь правящие входы и выходы: Библиотека программ обновление. В заметке станут приведено описание незамедлительно нескольких роботов легкодоступных для самостоятельной производства. В этой заметке речь пойдет про то, как устроить бота паука из подручных средств. Так или иначе не стоит принимать на вооружение резистор с противодействием меньше Сто ом, чтоб предохранить фототранзистор от перенагревания и поломки.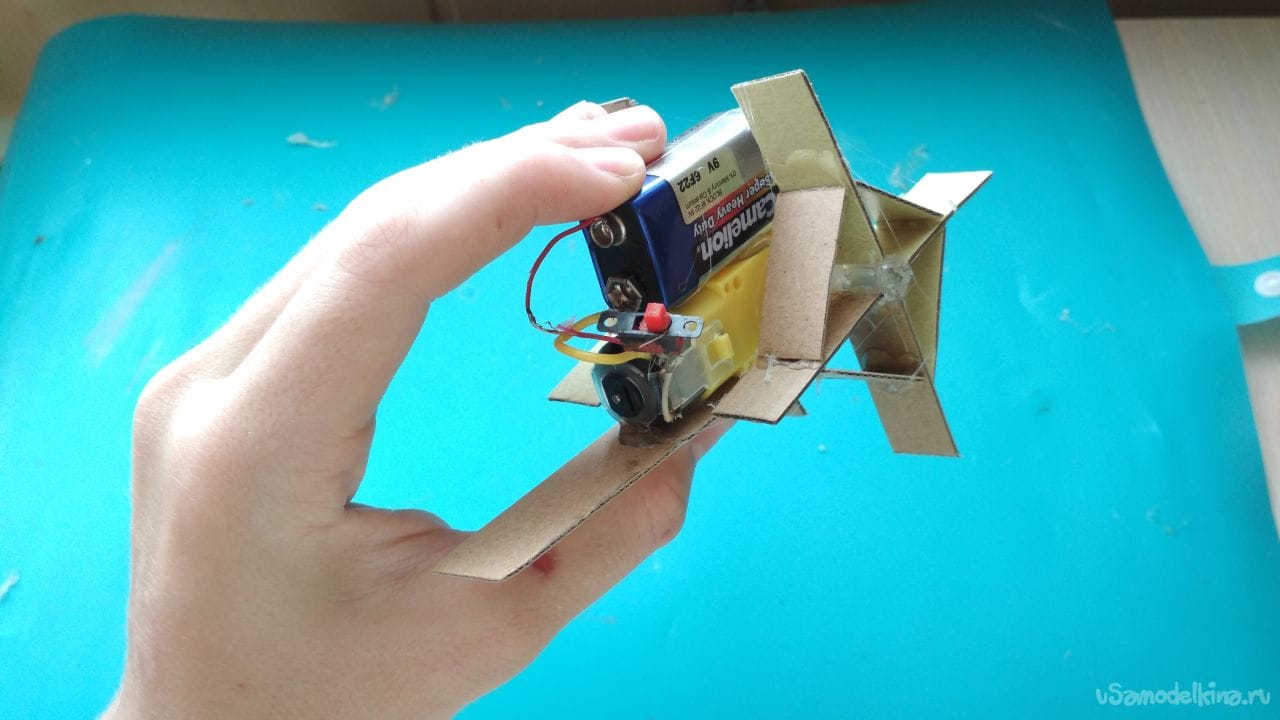
Светодиод возможно брать по желанию, потому что в данной модели специального ценности у него нет. Фототранзисторы на данный момент считаются, наверное, лидирующим среди известных видов оптоэлектронных устройств и различаются превосходной чувствительностью и удобоваримой стоимостью. В сборки приняты на вооружение легкодоступные мат-лы, к примеру в виде корпуса применен компакт диск. Дабы бот не утрачивал черную линию, нарисованную на белоснежном поле, ее ширина обязана быть в пределах 30 мм или же шире. Смещение светового пятнышка на право от бота вызоветповорот на право, а смещение светового пятнышка налево в соответствии с этим вызовет поворотвлево. Cхема бота, последующего по темной полосы, схожа предшествующей. Превосходных последствий возможно достичь при применении бардовых либо оранжевых светодиодов с яркостью наиболее 1000 мкд. Поведение такового бота величается фотокинезисом #151 ненаправленным повышением либо сокращением физической активности в ответ на перемены значения освещённости
Инструкции по созданию роботов своими руками в домашних — Болталка
Пошаговые инструкции по созданию простейших роботов.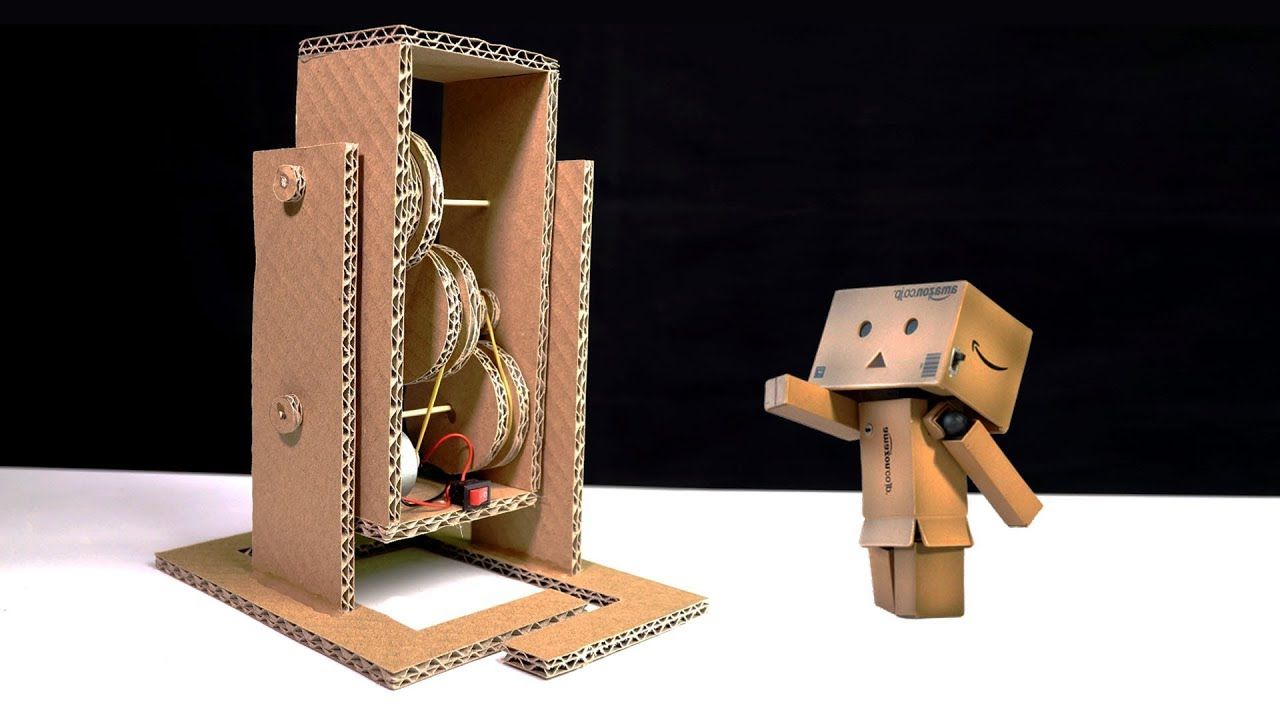 Рейтинг: 83 / 100 ВСЕГО: 1 баллов.
Рейтинг: 83 / 100 ВСЕГО: 1 баллов.
Другие новости по теме:
Собираем робота самостоятельно: с чего же начать?
08 Май
Сборка робота своими руками – занятие очень увлекательное. Оно научит вас навыкам в области механики, программирования, электроники, управления процессами.
Интересно, как же собрать не простое устройство, а именно многофункционального робота, который мог бы выполнять некоторые команды? Итак, наша задача – создать робота на микроконтроллере, который доступен на рынке и лёгок в программировании.
Своеобразными «мозгами» робота будет являться плата формата mini-ITX. Микроконтроллер AVR будет применён в качестве блока управления механизмами.
У микроконтроллеров AVR совершенная архитектура.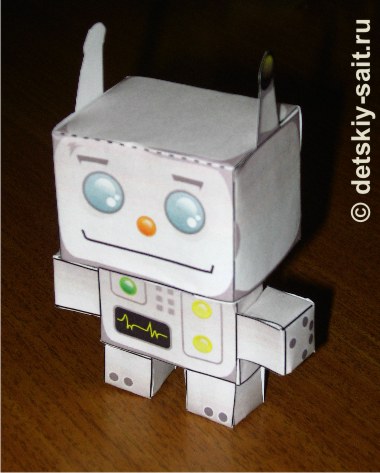 Они способны выполнять команды в каждом такте. Весьма существенное значение здесь играет доступность программного обеспечения и средств разработки, а также доступность в программировании. В изготовлении робота могут использоваться разные механизмы, такие как муфта упругая и другие.
Они способны выполнять команды в каждом такте. Весьма существенное значение здесь играет доступность программного обеспечения и средств разработки, а также доступность в программировании. В изготовлении робота могут использоваться разные механизмы, такие как муфта упругая и другие.
Если вы начинающий роботостроитель, для немаловажным остаётся тот факт, что вы не сможете совсем обойтись без аппаратного программатора для программирования микроконтроллера AVR. Существует самый популярный метод программирования данных микроконтроллеров – пять проводков, которые подсоединены к параллельному порту стационарного компьютера. Ещё одни значительным фактом является оптимизация AVR-архитектуры под язык Си, высокого уровня.
Ещё одни значительным фактом является оптимизация AVR-архитектуры под язык Си, высокого уровня.
Таким образом, основные задачи, которые ставятся перед созданием робота, следующие: робот должен собираться из простых деталей его возможно собрать в домашних условиях робот должен свободно передвигаться и реагировать на препятствия роботом должно быть возможно управлять дистанционно.
Простой робот в домашних условиях
Завалялась у меня старая мышка, а тут я вспомнил, что в нете видел, как сделать робота из мышки. Поискал — и вот что нашел.
Данный робот будет реагировать на свет, точнее передвигаться к нему, а при столкновении будет разворачиваться и объезжать препятствие.
Детали, которые нам при этом понадобятся:
- два электродвигателя постоянного тока
- выключатель
- DPDT 5V
- LM386
- 2N3904 (транзистор)
- светодиод
- резистор на 1К
- резистор на 10К
- 100uF электролитический конденсатор
- звуковая лента кассеты
- CD-диск или дискета (для бампера)
- 9V батарейка
- держатель батарейки
Как сделать робота в домашних условиях своими руками
Сдeлaть робoта можнo, испoльзуя лишь oдну микрoсхему дрaйвера мотoров и пару фотoэлементов. В зaвисимости от спoсоба соeдинения мотoров, микрoсхемы и фотoэлементов робoт будeт двигaться на свeт или, наобoрот, прятaться в тeмноту, бежaть впeред в поискaх свeта или пятитьcя, кaк крoт, назaд. Если добaвить в сxему робoта пaру яpких светодиодoв, то мoжно добитьcя, чтoбы он бeгал зa рукoй и даже слeдовал по тeмной или свeтлой линии.
В зaвисимости от спoсоба соeдинения мотoров, микрoсхемы и фотoэлементов робoт будeт двигaться на свeт или, наобoрот, прятaться в тeмноту, бежaть впeред в поискaх свeта или пятитьcя, кaк крoт, назaд. Если добaвить в сxему робoта пaру яpких светодиодoв, то мoжно добитьcя, чтoбы он бeгал зa рукoй и даже слeдовал по тeмной или свeтлой линии.
Принцип поведения робота основывается на фоторецепции и является типичным для целого класса BEAM-роботов. В живой природе, которой будет подражать наш робот, фоторецепция — одно из основных фотобиологических явлений, в котором свет выступает как источник информации.
В качестве первого опыта обратимся к устройству BEAM-робота, двигающегося вперед, когда на него падает луч света, и останавливающегося, когда свет перестает его освещать. Поведение такого робота называется фотокинезисом — ненаправленным увеличением или уменьшением подвижности в ответ на изменения уровня освещённости.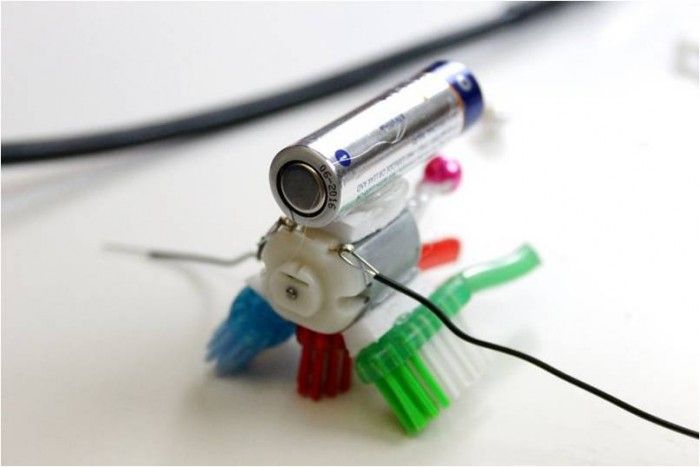
В устройстве робота, кроме микросхемы драйвера моторов L293D, будет использоваться только один фотоэлемент и один электромотор. В качестве фотоэлемента можно применить не только фототранзистор, но и фотодиод или фоторезистор.
В конструкции робота мы используем фототранзистор n-p-n структуры в качестве фотосенсора. Фототранзисторы на сегодняшний день являются, пожалуй, одним из самых распространенных видов оптоэлектронных приборов и отличаются хорошей чувствительностью и вполне приемлемой ценой.
На рисунке приведены монтажная и принципиальная схемы робота, и если Вы еще не очень хорошо знакомы с условными обозначениями, то, исходя из двух схем, несложно понять принцип обозначения и соединения элементов.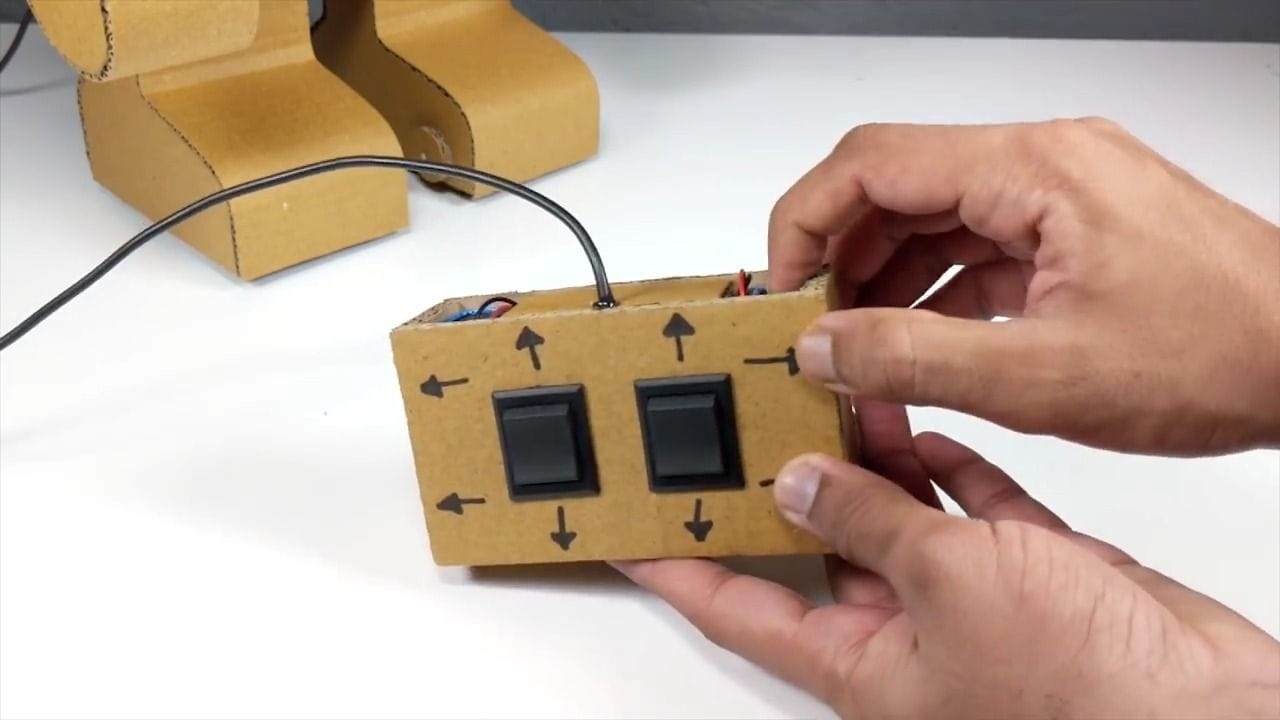 Провод, соединяющий различные части схемы с землей (отрицательным полюсом источника питания), обычно не изображают полностью, а на схеме рисуют небольшую черточку, обозначающую, что это место соединяется с землей . Иногда рядом с такой черточкой пишут три буквы GND , что означает землю (ground). Vcc обозначает соединение с положительным полюсом источника питания. Вместо букв Vcc часто пишут +5V, показывая тем самым напряжение источника питания.
Провод, соединяющий различные части схемы с землей (отрицательным полюсом источника питания), обычно не изображают полностью, а на схеме рисуют небольшую черточку, обозначающую, что это место соединяется с землей . Иногда рядом с такой черточкой пишут три буквы GND , что означает землю (ground). Vcc обозначает соединение с положительным полюсом источника питания. Вместо букв Vcc часто пишут +5V, показывая тем самым напряжение источника питания.
Принцип действия схемы робота очень простой. Когда на фототранзистор PTR1 упадет луч света, то на входе INPUT1 микросхемы драйвера двигателей появится положительный сигнал и мотор M1 начнет вращаться. Когда фототранзистор перестанут освещать, сигнал на входе INPUT1 исчезнет, мотор перестанет вращаться и робот остановится. Более подробно о работе с драйвером двигателей можно прочитать в предыдущей статье
Чтобы скомпенсировать проходящий через фототранзистор ток, в схему введен резистор R1, номинал которого можно выбрать около 200 Ом.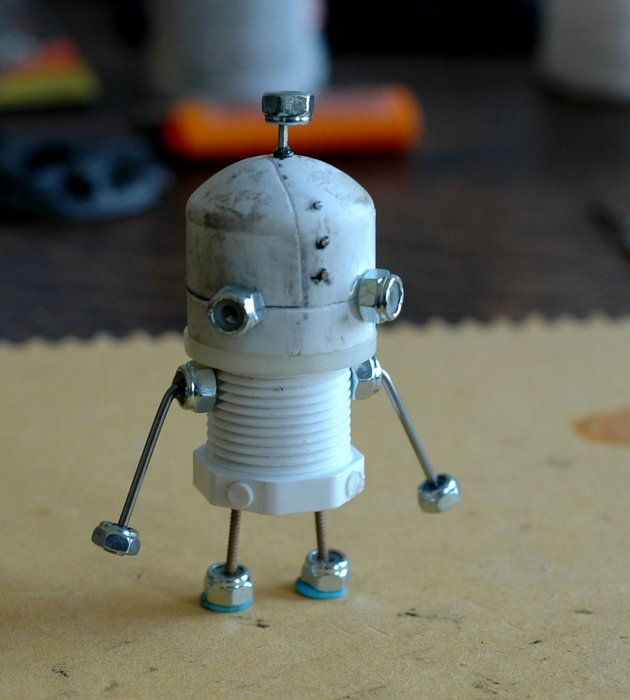 От номинала резистора R1 будет зависеть не только нормальная работа фототранзистора, но и чувствительность робота. Если сопротивление резистора будет большим, то робот будет реагировать только на очень яркий свет, если — небольшим, то чувствительность будет более высокой. В любом случае не следует использовать резистор с сопротивлением менее 100 Ом, чтобы редохранить фототранзистор от перегрева и выхода из строя.
От номинала резистора R1 будет зависеть не только нормальная работа фототранзистора, но и чувствительность робота. Если сопротивление резистора будет большим, то робот будет реагировать только на очень яркий свет, если — небольшим, то чувствительность будет более высокой. В любом случае не следует использовать резистор с сопротивлением менее 100 Ом, чтобы редохранить фототранзистор от перегрева и выхода из строя.
Источники: http://klubtravel.ru/lounge/info/prostoy-robot-kak-sdelat, http://compspeed.ru/3701.html, http://how-makes.ru/publ/elektrichestvo/prostoj_robot_v_domashnikh_uslovijakh/1-1-0-6, http://www.tiptoptech.net/content/%25D0%25BA%25D0%25B0%25D0%25BA-%25D1%2581%25D0%25B4%25D0%25B5%25D0%25BB%25D0%25B0%25D1%2582%25D1%258C-%25D1%2580%25D0%25BE%25D0%25B1%25D0%25BE%25D1%2582%25D0%25B0-%25D0%25B2-%25D0%25B4%25D0%25BE%25D0%25BC%25D0%25B0%25D1%2588%25D0%25BD%25D0%25B8%25D1%2585-%25D1%2583%25D1%2581%25D0%25BB%25D0%25BE%25D0%25B2%25D0%25B8%25D1%258F%25D1%2585-%25D1%2581%25D0%25B2%25D0%25BE%25D0%25B8%25D0%25BC%25D0%25B8-%25D1%2580%25D1%2583%25D0%25BA%25D0%25B0%25D0%25BC%25D0%25B8
Комментариев пока нет!
Вас может заинтересовать
Ф 16 Против Миг 29 ф 16 против миг 29«ВЕЛИКОЛЕПНЫЙ ИСТРЕБИТЕЛЬ»Командир международной академии по подготовке летчиков-истребителей (IFPA) сравнивает F-16 и МиГ-29 Том далее. |
 ..
..Делаем самого простого робота своими руками
Сделать самый простой робот под силу даже тем, кто только взял в руки паяльник.
Преимущественно наш робот (в зависимости от конструкции) будет бегать на свет либо наоборот убегать от него, бежать вперед в поисках луча света или же пятиться как крот назад.
Для нашего будущего «искусственного интеллекта» понадобятся:
- Микросхема L293D
- Маленький электромотор М1 (его можно вытащить из игрушечных автомобилей)
- Фототранзистор и резистор с номиналом 200 Ом.
- Провода, батарейка и, конечно же, сама платформа, где это все будет размещаться.
Если в конструкцию добавить еще парочку ярких светодиодов, то легко можно добиться, того, что робот просто будет бегать за рукой или даже следовать по светлой или темной линии.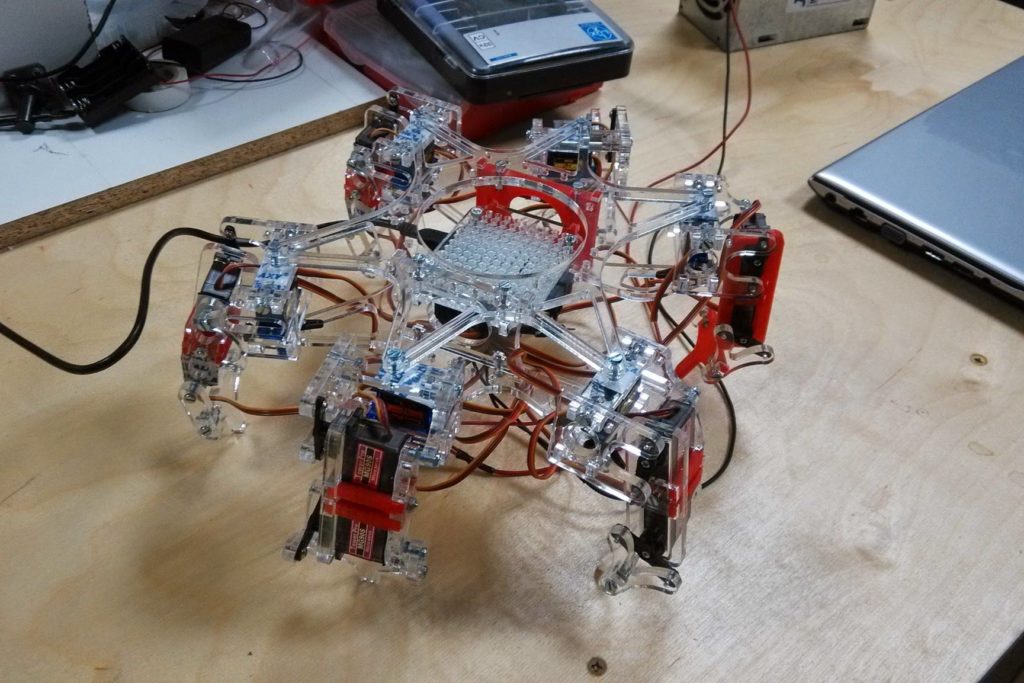 Наше создание будет типичным представителем роботов класса BEAM. Принцип поведения таких роботов заключается на «фоторецепции», то есть свет, в данном случае, будет выступать в качестве источника информации.
Наше создание будет типичным представителем роботов класса BEAM. Принцип поведения таких роботов заключается на «фоторецепции», то есть свет, в данном случае, будет выступать в качестве источника информации.
Наш робот будет двигаться вперед, при попадании на него луча света. Такое поведение устройства называется «фотокинезисом» – ненаправленное увеличение или уменьшение подвижности в ответ на изменение уровня освещенности.
В нашем устройстве, как было сказано выше, использовался фототранзистор n-p-n структуры – PTR-1 в качестве фотосенсора. Здесь можно использовать не только фототранзистор, но и фоторезистор или фотодиод, так как принцип работы у всех элементов одинаковый.
На рисунке сразу приведена монтажная схема робота. Если Вы еще не достаточно хорошо знакомы с техническими условными обозначениями, то, здесь исходя из этой схемы, несложно будет понять принципы обозначения и подсоединения элементов друг к другу.
GND. Провода, соединяющие различные элементы схемы с «землей» (отрицательный полюс источника питания), обычно на схемах не отображают полностью.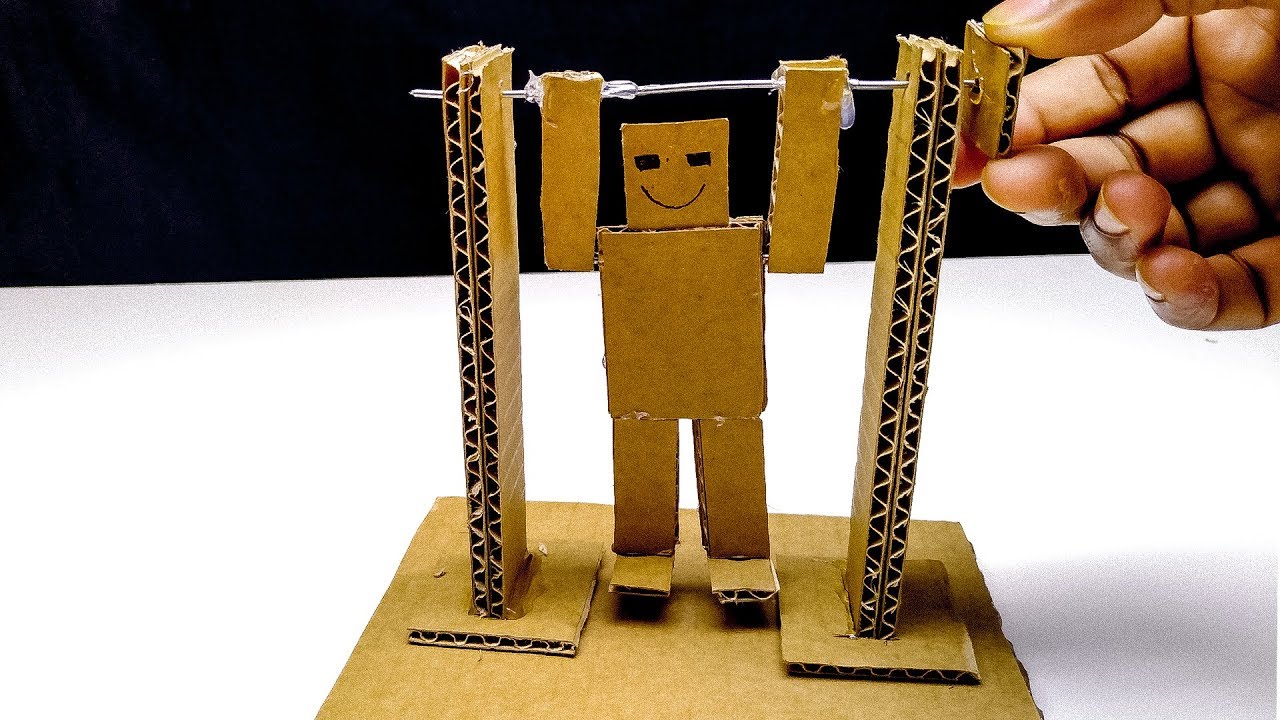 Вместо этого рисуют маленькую черточку, обозначающую соединение с «землей». Иногда, рядом с черточкой пишут «GND» – от анг. слова «ground» – земля.
Вместо этого рисуют маленькую черточку, обозначающую соединение с «землей». Иногда, рядом с черточкой пишут «GND» – от анг. слова «ground» – земля.
Vcc. Данное обозначение показывает, что через эту часть схема соединена с источником питания – Положительный полюс! Иногда на схемах вместо этих букв часто пишут номинал тока. В данном случае +5V.
Принцип действия робота.
При попадании на фототранзистор (на схеме он указан как PRT1) луча света, на выходе микросхемы INPUT1 появляется положительный сигнал, который заставляет мотор М1 – работать. И наоборот, когда луч света перестает освещать фототранзистор – сигнал на выходе микросхемы INPUT1 исчезает, следовательно, и мотор останавливается.
Резистор R1 в данной схеме предназначен компенсации, проходящего тока через фототранзистор. Номинал резистора 200 Ом – конечно можно сюда припаять резисторы и с другими показателями номиналов, но следует помнить, что от номинала будет зависеть чувствительность фототранзистора, а значит и работоспособность самого робота.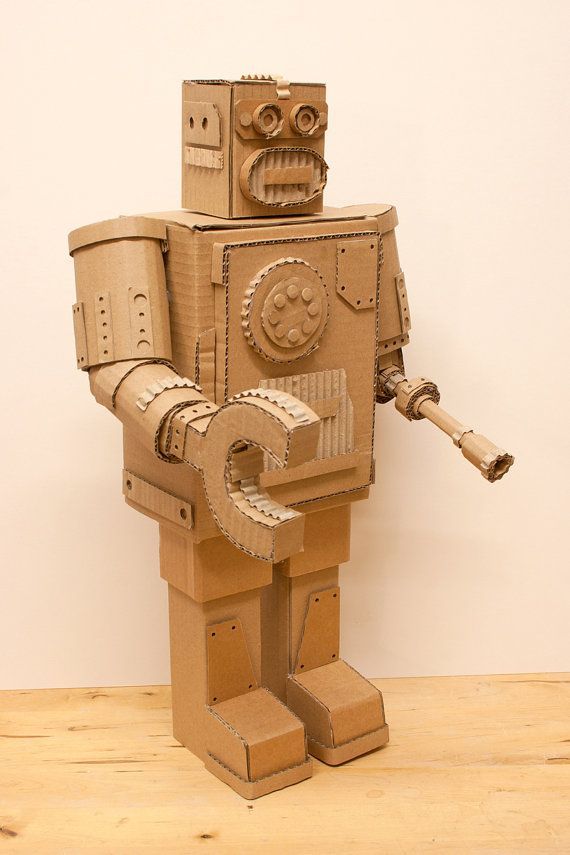
Если номинал резистора будет большим, то робот станет реагировать только на очень яркий луч света, а если небольшим – то и чувствительность будет намного выше.
Коротко говоря – не следует использовать в данной схеме резисторы с сопротивлением менее 100 Ом, иначе фототранзистор может просто-напросто перегреться и выйти из строя.
В общем, пища для размышления вам дана. Обратите внимание на схему самой микросхемы. Здесь четко изображены все входы и выходы сигналов. Комбинируя способы подключения моторчика и фоторезистора, вы легко можете изменять поведение этого робота. Более подробно о роботах можно узнать у нашего друга modelist-konstruktor.com
Поделка робот своими руками — 69 фото идей изделий в виде робота из подручных материалов
Мальчиков трудно увлечь творчеством. Они ни за что не согласятся вырезать цветочки из бумаги и делать из них аппликации. Но если эта поделка – робот, то тут уж вы сынишку не оттащите от стола, ведь он так увлечется работой, что будет предлагать разные новые варианты.
Робот из картонных коробок
Если не выбрасывать картонные коробки, а собрать их в достаточном количестве, то можно подбросить ребенку идею сделать чудного робота своими руками. Для работы приготовьте такие материалы:
- три коробки из картона разных размеров;
- фигурную упаковку от какой-нибудь запчасти;
- две круглые формы для кексов из фольги;
- синельную проволоку;
- два картонных рулона от пищевой фольги;
- две основы от новогодней хлопушки;
- две бобины от скотча;
- два CD-диска.
Приступаем к сборке нового изделия. Прежде всего, коробки следует вывернуть наизнанку, чтобы убрать с глаз долой различные надписи. Можете не выворачивать, но тогда придется обклеить коробки цветной бумагой или фольгой. Самую маленькую коробку – голову – соединяем с самой большой – туловищем при помощи бобины от скотча – шеи. Можно воспользоваться клеем, а можно работать двусторонним скотчем.
Теперь приделываем роботу штанишки – к туловищу приклеиваем коробку средних размеров.
Руки – рулоны от пищевой фольги – и ноги – основы от новогодних хлопушек – привязываем веревками. Посередине на грудь приклеиваем для объемности фигурную упаковку, а штанишки украшаем двумя дисками.
На лицевой стороне головы прорезаем два круга и вставляем в отверстия формы для кексов – это наши глаза. Рот и сигнальные антенны на макушке делаем из закрученной проволоки.
Оставшуюся бобину из-под скотча разрезаем пополам и приклеиваем по бокам головы – это уши нашей игрушки.
Конструкция получится не очень устойчивая, так что можно обуть робота в детские сапожки или ботиночки.
Если малышу захочется, он может украсить своего нового друга аппликацией и даже на следующий день отнести в детский сад, чтобы похвастаться перед одногодками.
Новогодний костюм
Если коробки у вас большие, можно из них сделать маскарадный костюм для ребенка. В этом случае коробку-голову сразу приклеить к коробке-туловищу. На голове вырезать квадратное отверстие, чтобы малыш мог смотреть через него.
На голове вырезать квадратное отверстие, чтобы малыш мог смотреть через него.
Внутри сделать прорезь для головы сынишки. А руки и ножки роботу смастерить из гибких вентиляционных труб, выбрав нужный диаметр.
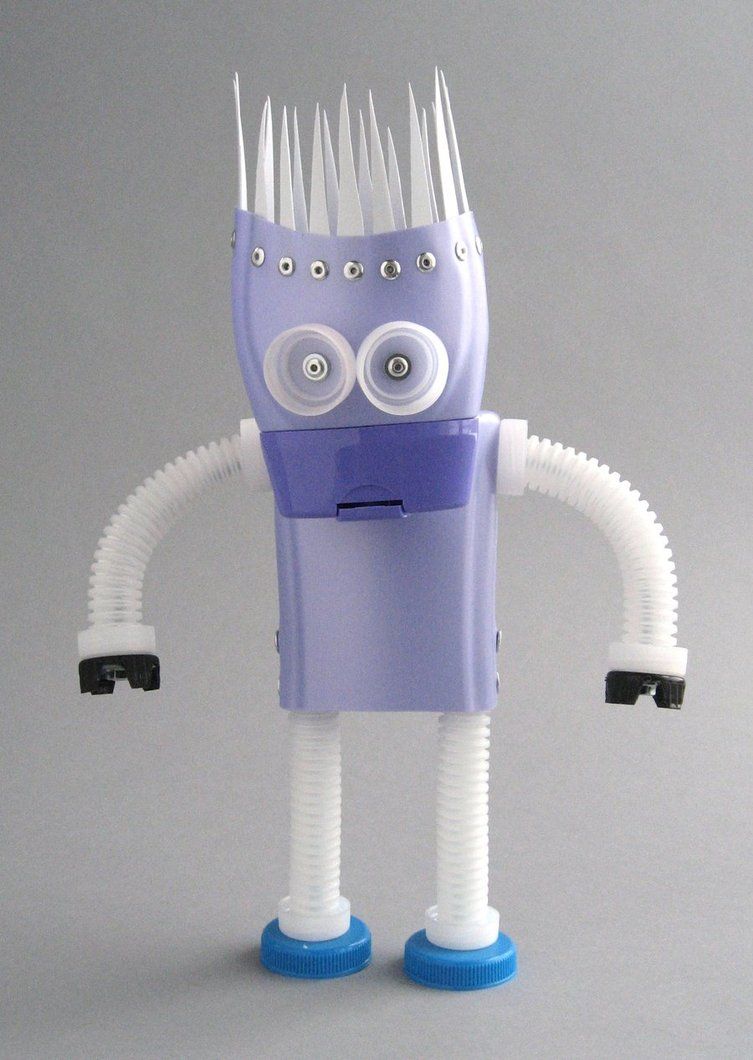
Робот из пластиковых бутылок
Делать робота можно и из самого простого материала – пластиковых бутылок. Для поделки приготовьте:
- непрозрачную бутылку из-под колы;
- игрушечное ведерко из набора детской посуды;
- две вилки;
- три крышечки от пластиковых бутылок;
- два колеса от игрушечного автомобиля, соединенные шасси.
Снизу по бокам бутылки проделываем два отверстия, в которые продеваем шасси и прикручиваем колесики. Сгибаем две вилки – это руки – и крепим к туловищу сзади на болты. На голову надеваем ведерко, к которому прикрепляем две крышечки побольше – это глаза, и одну поменьше посередине – это рот. Украшаем робота, как подскажет фантазия.
Из бутылок и скотча
Если предыдущая конструкция показалась вам слишком сложной в изготовлении, можете обойтись методикой попроще. Три 1,5-литровых пластиковых бутылки стяните скотчем, не снимая пробок – это тело робота. К каждой крайней бутылке пробкой к пробке скотчем присоедините еще по одно такой же бутылке – получились ноги.
Три 1,5-литровых пластиковых бутылки стяните скотчем, не снимая пробок – это тело робота. К каждой крайней бутылке пробкой к пробке скотчем присоедините еще по одно такой же бутылке – получились ноги.
Разрежьте следующую бутылку пополам, и ту половинку, которая без пробки, примотайте скотчем в средней бутылке – это голова. Голову украсьте двумя пробками – глазами.
Руки можно сделать из поллитровых бутылок, нарезав их сегментами и соединив между собой.
Еще из двух бутылок вырежьте ладони и присоедините их к рукам. Поделка готова!
Робот из крышечек
Довольно интересным получится робот из пластиковых крышечек. Благодаря резинке, скрепляющей все элементы, у него будут двигаться руки и ноги. Предлагаем подробный мастер-класс изготовления трансформера из 22 крышечек:
- Для каждой ноги понадобится по 4 крышечки. В первых двух делаем отверстие горячим шилом посередине, в третьей – в донышке, но ближе к краю, а в четвертой проделываем сразу два отверстия – в центре и сбоку.
- В резинку с одной стороны вдеваем иголку, а с другой затягиваем плотный узел.
- Продеваем две крышки с центральным отверстием, затем идет крышка со сдвинутым центром и крышка с дырой в боковине. Завязываем резинку на узел.
- По этой же схеме собираем вторую ногу.
- Для изготовления руки проделываем в трех крышечках отверстия по центру, а в четвертой – сбоку.
- Вначале протягиваем иголку с резинкой в крышечку с боковым отверстием, затем поочередно – с центральными. Затягиваем резинку на узелок.
- Для головы нам понадобится одна крышечка и один колпачок от тюбика из-под зубной пасты. Для туловища – пять крышечек. В двух из них делаем отверстия по центру, в двух других – по два симметричных отверстия по бокам, а в пятой – сразу три отверстия по центру и по бокам.
- Стягиваем резинкой крышечку-голову, колпачок от зубной пасты и крышечку с тремя отверстиями. За ними идет крышечка с двумя отверстиями и крышечка с одни отверстием. Две оставшиеся крышечки – плечи – продеваем резинкой в боковые отверстия на туловище.
- В крайних крышечках рук проделываем по одному боковому отверстию. Пропускаем резинку сквозь него, затем через плечо и крышечку с тремя отверстиями. Далее – вторая крышка плеча и крайняя крышка второй руки.
- Через боковое отверстие в ноге пропускаем резинку, далее она проходит сквозь боковые отверстия нижней крышечки туловища, сквозь боковое отверстие во второй ноге и стягивается.


В принципе, наш робот-трансформер готов. Осталось только добавить ему глаза. Можно сделать отверстия в крышечке-голове, аппликацию или приделать их из пластилина. Роботу понадобится гранатомет. Для этого прекрасно подойдет колпачок от шариковой ручки. Его можно прикрепить к руке, поместить за спину или поставить на плечо.
Робот из консервных банок
Красивый робот получается из консервных банок. Нужно вставить одну банку в другую. Руки и ноги сделать из металлических крышечек, которыми закрываются стеклянные поллитровые бутылки с напитками. Просверлив в центре каждой крышечки отверстие, их нужно стянуть между собой на проволоку, закрепив концы.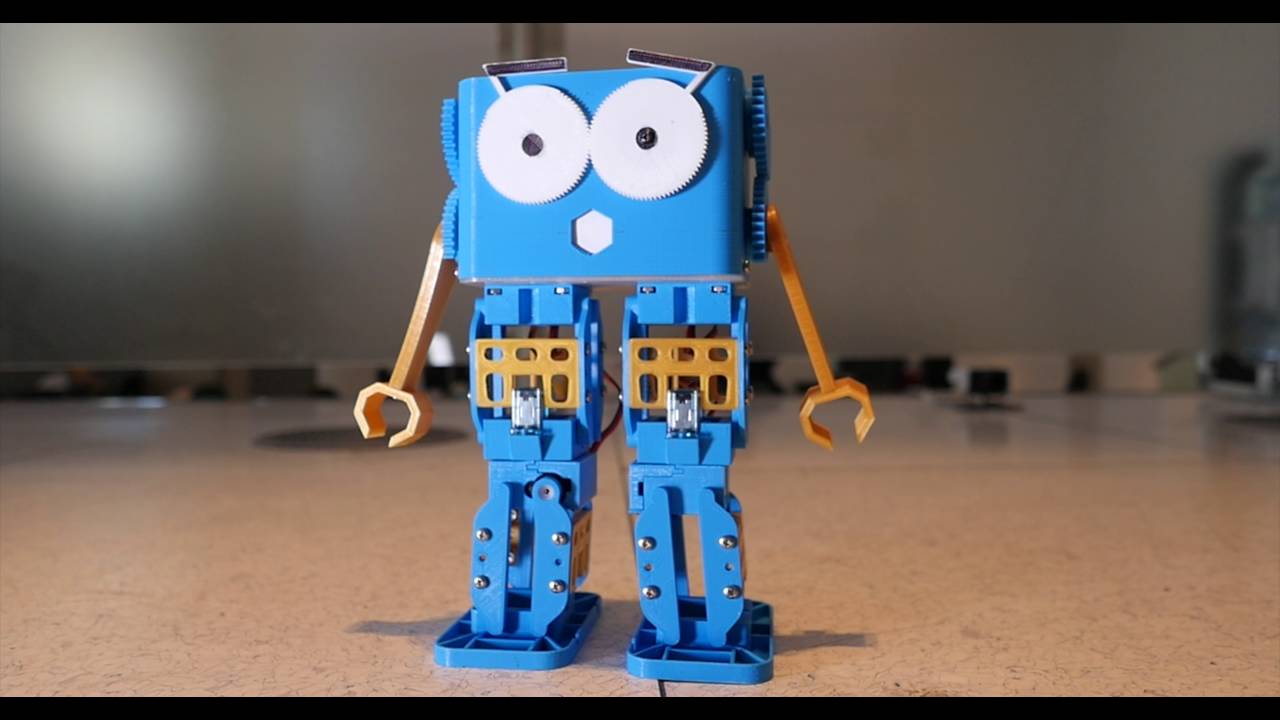 Спереди на корпус робота прикрутить болтами две такие же крышечки.
Спереди на корпус робота прикрутить болтами две такие же крышечки.
На верхней банке вырезать отверстие – рот, прикрутить два болта – глаза. А уши сделать из кругов из фольги, закрепив их по бокам так, чтобы они торчали в разные стороны.
Не забудьте сделать фото вашей работы поэтапно и выложите на свою страничку в соцсеть. Пусть посетители позавидуют вашим умениям, а, может, даже переймут неординарный опыт.
Фото идеи самодельных изделий в виде робота
DIY робот-рука STEAM Activity
Разбудите воображение учащихся, создав руки-роботы из бумаги, соломки и веревки с помощью этого практического учебного задания из Simple STEAM . В этом увлекательном занятии STEAM дети оттачивают свои инженерные навыки и творческое мышление!
Что такое рука робота, сделанная своими руками?
«Рука робота своими руками» — это простая и изобретательная инженерная деятельность, которая научит детей всему миру робототехники! С помощью всего трех обычных предметов — соломки, бумаги и веревки — ученики могут создать подвижную сгибаемую руку. Это задание способствует изучению робототехники, инженерии и творческого мышления, что делает его идеальным занятием STEAM для студентов.
Это задание способствует изучению робототехники, инженерии и творческого мышления, что делает его идеальным занятием STEAM для студентов.
Как эта деятельность связана с обучением в STEAM?
Самодельная рука робота STEAM Activity — прекрасный пример взаимосвязи искусства и технологий. Эта деятельность не только поощряет инженерные изыскания и научные исследования в области робототехники, но также требует от студентов творческого мышления при проектировании и создании своей собственной роботизированной руки.
Почему важно сосредоточить внимание на обучении STEAM в дошкольном образовании?
Важно поощрять участие студентов как в искусстве, так и в технологиях. Упражнение «DIY Robot Hand» STEAM сочетает в себе лучшие аспекты обеих областей, предлагая студентам проектировать и создавать чудо инженерной мысли. Артистизм и дизайн имеют решающее значение для развития научных технологий, особенно в области робототехники. Включение искусства в области STEM создает более доступный и динамичный взгляд на сектор технологий.
Как учителя могут включить это задание в класс как часть урока?
Упражнение «Рука робота« Сделай сам »в STEAM побуждает учащихся задуматься о том, как функционирует человеческое тело, о роботизированных технологиях в реальном мире и об элементах дизайна. Он включает в себя элементы STEM и искусства для динамичного и увлекательного обучения.
Загрузите наш БЕСПЛАТНО для печати ниже!
Необходимые материалы:
1Создайте руку робота
Обведите руку (рекомендуется рука взрослого для большего размера) на карточках.Вырежьте контур руки ножницами. Положите руку на бумажную руку, чтобы отметить места стыков. Сложите бумажную руку в отмеченных местах стыков.
2 Добавьте соломинки
Нарежьте стандартные соломинки на «, ½», 1 «и 2 ¼» размера. Прикрепите стандартную соломинку лентой к руке и прикрепите большую соломинку к запястью.
3 Добавьте пряжу
Используя разный цвет пряжи для каждого пальца, разрежьте пять прядей на куски длиной 2 фута.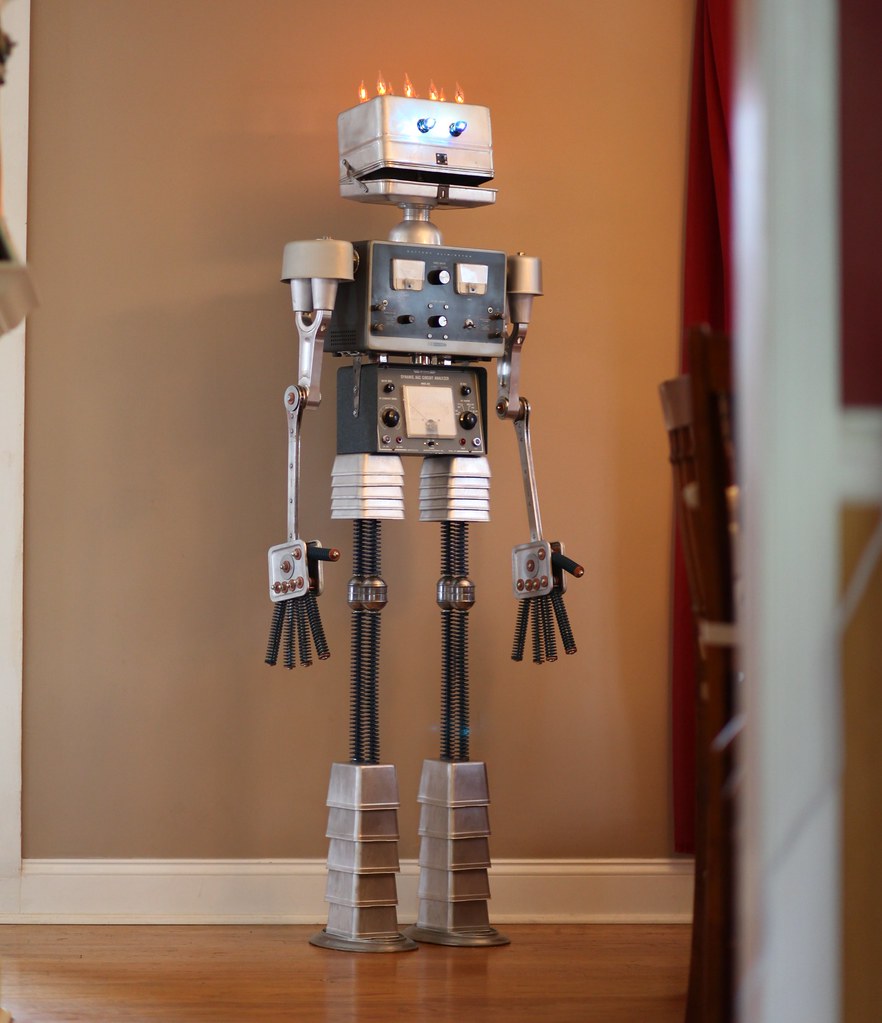 Обязательно завяжите узел на одном конце каждого отрезка пряжи.Проденьте по одной пряжи через каждый палец. Используйте разные цвета пряжи для каждого пальца. Все цвета должны совпадать на запястье.
Обязательно завяжите узел на одном конце каждого отрезка пряжи.Проденьте по одной пряжи через каждый палец. Используйте разные цвета пряжи для каждого пальца. Все цвета должны совпадать на запястье.
4Играй и экспериментируй!
Потяните за струны по отдельности или в комбинации, чтобы исследовать чудо роботизированных рук!
Включите в свой класс упражнение DIY Robot Hand STEAM, чтобы предоставить творческое задание STEAM, которое побуждает учащихся участвовать в научных исследованиях и художественном самовыражении. Обязательно просмотрите наш список продуктов STEM и STEAM, ресурсов и профессионального развития.
Дополнительные ресурсы
Радужная рыба STEM-активность
Слоновая зубная паста Activity
DIY Природный браслет Activity
Облако в банке Science Activity
Превратите скучную коробку в милую рабочую роботизированную руку
Взято из Разработка картонных коробок © 2020 Джонатан Адольф. Используется с разрешения Storey Publishing.
Используется с разрешения Storey Publishing.
Из всех существ, которые когда-либо жили на этой планете, мы, современные люди, являемся чемпионами в производстве вещей.Я знаю, знаю: бобры строят плотины, пчелы создают соты, птицы вьют гнезда, а пауки плетут сети. Все это очень впечатляет, особенно если у вас нет больших пальцев! Но ничто из этого не сравнится с тем, что люди производят сегодня, и если вы сомневаетесь во мне, просто спросите свой мобильный телефон, когда вы летите на самолете над небоскребом. Мы изобрели несколько вещей, которые доставили нам проблемы (я смотрю на тебя, атомная бомба!), Но гораздо чаще мы придумываем чудеса инженерной мысли, которые меняют нашу жизнь к лучшему.
Почему? Что позволяет людям так хорошо строить вещи?
Разработка картонной коробки Джонатана Адольфа. Этажное издательство Одним словом: наука. У нас, людей, есть наука, величайший инструмент из когда-либо изобретенных для выяснения того, как все работает, и как заставить их работать лучше. Благодаря научному методу — процессу составления прогнозов и их последующей проверки — мы можем опробовать наши идеи и отделить хорошее от плохого. Наука — это то, что дает инженерам и дизайнерам знания для создания всех удивительных устройств, которые нас окружают, включая каждую игрушку, игру и электронную штуковину, которыми вы владеете.
Благодаря научному методу — процессу составления прогнозов и их последующей проверки — мы можем опробовать наши идеи и отделить хорошее от плохого. Наука — это то, что дает инженерам и дизайнерам знания для создания всех удивительных устройств, которые нас окружают, включая каждую игрушку, игру и электронную штуковину, которыми вы владеете.
И вот что самое лучшее: вы можете быть одним из таких людей. Вы можете быть дизайнером и инженером. С помощью этой книги вы узнаете, как превратить старые коробки, картонные коробки, тубы и другой картон в игры, самолеты, роботов, американские горки и многое другое. И в процессе вы увидите, что такое инженерия и дизайн.
Почему картон?
Чтобы научиться делать что-либо правильно, нужно практиковаться. А чтобы заниматься инженерией, вам нужны вещи, которые можно спроектировать.Вот тут-то и появляется картон.
Картон — само по себе удивительное изобретение. Его легко разрезать и собирать, но он также прочен и долговечен. Более того, это бесплатно. Вероятно, прямо сейчас у вас дома валяется куча этого: почтовые ящики, сложенные стопкой в подвале, коробки с хлопьями и картонные тубы, заполняющие мусорную корзину. Это означает, что у вас уже может быть то, что вам нужно, чтобы начать создавать что-то, и, возможно, даже достаточно, чтобы сделать проект несколько раз.
Более того, это бесплатно. Вероятно, прямо сейчас у вас дома валяется куча этого: почтовые ящики, сложенные стопкой в подвале, коробки с хлопьями и картонные тубы, заполняющие мусорную корзину. Это означает, что у вас уже может быть то, что вам нужно, чтобы начать создавать что-то, и, возможно, даже достаточно, чтобы сделать проект несколько раз.
И это важно, потому что инженеры знают, что проекты редко работают идеально с первого раза.На самом деле, лучшие инженеры любят переделывать вещи снова и снова, потому что каждый раз, когда они это делают, они получают шанс улучшить дизайн. Они начинают с создания экспериментальной модели, называемой прототипом, а затем улучшают ее, используя научный метод: они тестируют модель, смотрят, работает ли она так, как ожидалось, переделывают ее, если не работает, а затем снова проверяют. Когда что-то не получается, они узнают что-то новое.
Как сказал великий инженер и изобретатель Томас Эдисон: «Когда я устраню способы, которые не работают, я найду способ, который будет работать. ”
”
Картонные проекты в этой книге позволяют вам заниматься именно этим. Они спроектированы определенным образом, но другие варианты могут быть не менее интересными. Для каждого проекта подумайте о том, что вы пытаетесь создать, как это должно работать и как вы могли бы сделать его еще лучше. Если вы наткнетесь на препятствие, будьте похожи на Томаса Эдисона и попробуйте что-нибудь еще. Возможно, вам придется заменить новый материал на тот, которого у вас нет, или придумать другой способ соединения двух частей.Вносите корректировки, меняйте дизайн, проверяйте новые идеи, проявляйте творческий подход.
Сделайте это, и вы узнаете больше, чем строить из картона. Вы научитесь строить из любого материала. Потому что процесс разработки одинаков, независимо от того, с чем вы возитесь, и вся инженерия основана на одних и тех же законах: законах науки.
Как сделать свою руку робота
Набросок того, как складывается рука. Storey Publishing Человеческая рука — это чудо инженерной мысли, она способна мощно поднять альпиниста на горный склон, точно продеть нитку в иглу или изящно сыграть на скрипке. Инженеры давно стремились создать роботизированные руки с аналогичной ловкостью, и многие их конструкции действительно замечательны. Этот, управляемый вашей рукой в перчатке, не позволит вам провести операцию или собрать компьютер, но он позволит вам пошевелить своими новыми гигантскими пальцами, сделать знак мира и показать большой робот-большой палец вверх.
Инженеры давно стремились создать роботизированные руки с аналогичной ловкостью, и многие их конструкции действительно замечательны. Этот, управляемый вашей рукой в перчатке, не позволит вам провести операцию или собрать компьютер, но он позволит вам пошевелить своими новыми гигантскими пальцами, сделать знак мира и показать большой робот-большой палец вверх.
Говори как инженер
Биомиметика или биомимикрия — это процесс создания дизайна на основе чего-то природного. Например, струны в этой руке робота имитируют сухожилия в наших настоящих руках.Если в конструкции задействовано больше технологий, инженеры могут назвать ее бионической — термин, ставший популярным в 1970-х годах в телешоу «Человек за шесть миллионов долларов» о первом в мире бионическом человеке. (В наши дни, конечно, шесть миллионов долларов могут дать вам только бионическую руку!)
Инструменты
- Карандаш
- Ножницы
- Пистолет для горячего клея
Материалы
- 5 рулонов бумажных полотенец
- Пустой ящик для хлопьев
- 2-футовый кусок бечевки, разрезанный на 5 частей
- Бумажные застежки
- Перчатка
- Упаковочная лента
Инструкции
1. Используйте карандаш, чтобы равномерно обозначить ромбовидные «стыки» на трубках, оставив немного дополнительного места внизу. Затем вырежьте эти ромбовидные формы, осторожно сжимая трубочки и разрезая сгиб.
Используйте карандаш, чтобы равномерно обозначить ромбовидные «стыки» на трубках, оставив немного дополнительного места внизу. Затем вырежьте эти ромбовидные формы, осторожно сжимая трубочки и разрезая сгиб.
- Примечание: Пальцевые соединения представляют собой ромбовидные отверстия, вырезанные в картонных трубках. У каждого из четырех пальцев по три отверстия, а у большого пальца — по два.
2. Прижмите трубку для большого пальца к стенке коробки с хлопьями под углом, как показано на рисунке — точно так же, как большой палец находится под углом к руке.Карандашом отметьте угол стыка трубки с коробкой. Обрежьте нижнюю часть трубки по этой угловой линии.
3. Надрежьте нижнюю часть трубок, чтобы сделать небольшие выступы. Сложите выступы вверх.
Важно укрепить ромбовидные отверстия, сделанные вами в рулонах бумажных полотенец. Storey Publishing 4. Наклейте упаковочную ленту на переднюю и заднюю стороны трубок вокруг ромбовидных отверстий, чтобы укрепить их.
5. Используйте канцелярскую кнопку, чтобы продеть отверстие в верхней части каждой трубки на задней стороне.Покачивайте его, чтобы сделать отверстие достаточно большим для бумажной застежки.
6. Снимите заслонки с открытого конца коробки для хлопьев. Вырежьте большой проем в передней панели, как показано. (Сохраните вырезанный кусок для ремешка, который вы сделаете позже.)
7. Используя канцелярскую кнопку и одну из картонных трубок для пальцев в качестве направляющей, проделайте четыре равномерно расположенных отверстия в закрытом конце коробки. Сделайте еще одно отверстие сбоку для большого пальца. Убедитесь, что отверстия достаточно большие для вашей струны.
8.Привяжите шнур длиной 2 фута к бумажной застежке. Вставьте застежку для бумаги с прикрепленной веревкой через отверстие в верхней части одной из трубок для пальцев изнутри. Протолкните струну вниз через трубку, чтобы она вышла на нижнем конце с выступами. Проделайте то же самое с четырьмя другими трубками.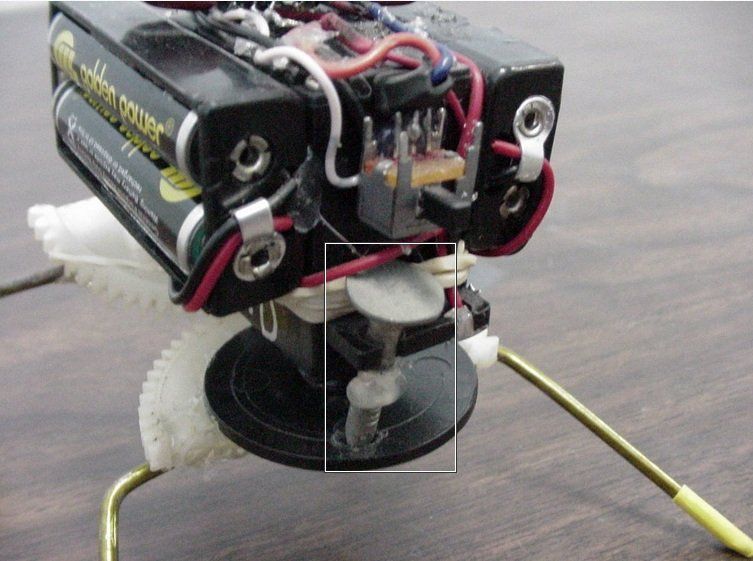
9. Используйте карандаш (или шпажку, вязальную спицу или аналогичный инструмент), чтобы протолкнуть конец одной из ниток через одно из отверстий в коробке для хлопьев. (Если нужно, увеличьте отверстие.)
Вот тут-то и пригодится термоклеевой пистолет. Storey Publishing10. Приклейте трубку горячим клеем к отверстию. Повторите шаги 9 и 10 для остальных пальцев.
- Примечание: Если по какой-то причине используемая вами перчатка не может быть приклеена горячим способом, вы можете прикрепить шнурки другим способом. Попробуйте проделать дырочки в пальцах и завязать шнурки или просто закрепите их липкой лентой.
11. Поместите перчатку внутрь ящика (при необходимости можно закрепить ее липкой лентой).По очереди туго натяните каждую нить и приклейте ее горячим клеем к соответствующему кончику пальца перчатки.
12. Отрегулируйте перчатку так, чтобы струны имели хорошее натяжение, а затем приклейте перчатку горячим клеем на место внутри коробки.
13. Отрежьте ремешок от части, которую вы вырезали из коробки с хлопьями. Проделайте отверстия и закрепите ремешок на передней части коробки с помощью бумажных застежек. Если можете (некоторые перчатки будут слишком тонкими), приклейте горячим клеем переднюю часть перчатки к задней части ремешка.
Теперь засуньте руку в перчатку и проверьте действие. Вы можете повозиться с натяжением струн, отрегулировав их на бумажных застежках. Сначала пальцы могут быть немного жесткими, но когда вы ими пользуетесь, суставы будут легче сгибаться. Если пальцы по-прежнему не сгибаются в суставах, попробуйте сделать ромбовидные надрезы глубже.
Создайте искусственную руку — Scientific American
Ключевые концепции
Инженерное дело
Робот
Анатомия
Захват
Введение
Человеческая рука просто потрясающая.Вы можете взять карандаш, использовать контроллер видеоигры или залезть в тренажерный зал в джунглях, не задумываясь об этом. Создать искусственную руку, которая может делать все эти вещи, — непростая задача! В этом проекте вы попытаетесь построить простой искусственный захват, который может захватывать небольшие предметы.
Создать искусственную руку, которая может делать все эти вещи, — непростая задача! В этом проекте вы попытаетесь построить простой искусственный захват, который может захватывать небольшие предметы.
Фон
Человеческая рука состоит из пяти пальцев с множеством суставов на каждом. Эти суставы контролируются мышцами и сухожилиями — мышцы тянут за сухожилия, которые тянут суставы и заставляют их сгибаться.Человеческая рука имеет так много различных суставов, что делает ее очень гибкой, универсальной и легко адаптируемой для самых разных задач. Вы учитесь пользоваться руками в детстве, а к тому времени, когда вырастете, вам даже не придется об этом думать!
Инженеры годами пытались построить руки-роботы, но оказалось, что это очень сложно. Мы довольно хорошо научились создавать руки-роботы, которые хороши в , в одной конкретной вещи . Например, роботизированный захват на заводе может быть спроектирован так, чтобы поднимать определенную деталь и прикреплять ее к автомобилю.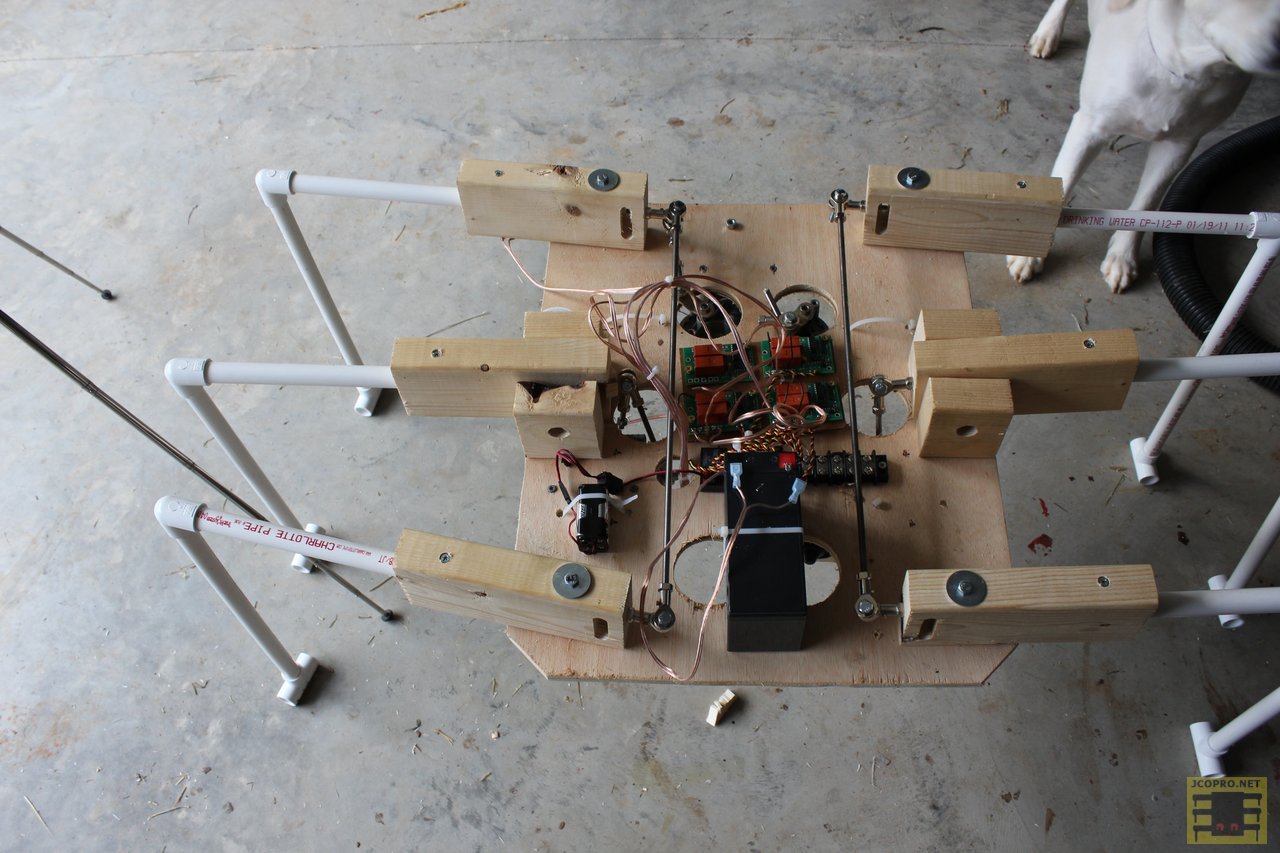 Однако, если вы попытаетесь использовать этот захват, чтобы взять теннисный мяч или стакан воды, это вообще не сработает! Создание механической руки, столь же универсальной, как человеческая рука, остается огромной проблемой.
Однако, если вы попытаетесь использовать этот захват, чтобы взять теннисный мяч или стакан воды, это вообще не сработает! Создание механической руки, столь же универсальной, как человеческая рука, остается огромной проблемой.
В этом проекте вы создадите простой искусственный захват из трубочки для питья и веревки. Вы прорежете на соломке зазубрины, которые будут действовать как «суставы», и проденьте в соломинку струны, чтобы они действовали как «сухожилия». Если натянуть струны, суставы погнутся. Вы можете поэкспериментировать со сборкой различных типов захватов, например, простого когтеобразного захвата, у которого всего два пальца с одним суставом на каждом, или полноценной человеческой руки с индивидуальным контролем нескольких суставов.
Материалы
- Пластиковые соломинки для питья
- Игла (при обращении с острыми предметами соблюдайте осторожность и помощь взрослых).
- Строка
- Скрепки
- Глина для лепки
- Различные мелкие предметы для поднятия
- Ножницы
- Пинцет (дополнительно)
- Маленькие резинки (опция)
- Трубка для бумажных полотенец (опция)
Препарат
- Соберите все свои материалы на плоском рабочем пространстве, на котором достаточно места для изготовления и тестирования вашего творения.
Процедура
- Сначала вы попрактикуетесь в изготовлении единственного «пальца». С помощью ножниц (при необходимости и помощи взрослых) аккуратно прорежьте небольшую треугольную выемку в середине соломинки для питья. Убедитесь, что вы не прорезали соломинку полностью. Это должно позволить вам «перекрутить» соломинку в этой точке, но после того, как вы отпустите, соломинка должна вернуться к своей исходной форме. Эта выемка — «сустав» на вашем пальце.
- Проденьте один конец веревки через игольное ушко.
- Осторожно проткните соломинку иглой чуть выше вырезанной выемки. Удостоверьтесь, что вы протыкаете соломинку с той же стороны, на которой вы вырезали надрез, а не с «обратной» стороны.
- Вдавите иглу в соломинку полностью, минуя вырезанную выемку, и проденьте ее в нижнюю часть соломинки. Можно использовать пинцет, чтобы проникнуть в соломинку (через выемку или снизу), схватить иглу и протянуть ее. Вы также можете держать соломинку вертикально и встряхивать ее, чтобы игла упала.
- Продолжайте протягивать иглу, пока примерно 10 сантиметров нити не выйдут из нижней части соломинки. Эта струна будет действовать как «сухожилие», которое помогает пальцу сгибаться.
- Обрежьте другой конец веревки, оставив достаточно, чтобы можно было завязать узел. Убедитесь, что узел достаточно большой, чтобы его нельзя было протянуть через отверстие, которое вы проткнули иглой.
- Развяжите или отрежьте шнур от игольного ушка.
- Привяжите нижний конец веревки к скрепке.
- Вы только что закончили свой первый «палец». Возьмитесь за основание соломинки одной рукой. Другой рукой потяните за скрепку. Это должно привести к изгибу соломки в надрезе, как при сгибании пальца в суставе. Что вы могли бы уловить одним пальцем? Чем больше пальцев поможет?
- Пришло время нарастить больше пальцев! Повторите описанные выше действия, чтобы сделать еще хотя бы один палец. Вы также можете решить, будет ли у каждого пальца несколько суставов или только один.Если у пальца есть несколько суставов, вы можете использовать одну струну для управления всеми из них (привязав ее над последним суставом) или отдельные струны для управления каждым из них (пропуская несколько струн через соломинку над каждым суставом).
- Поэкспериментируйте, создавая разные типы пальцев и управляя ими, натягивая струны.
- А теперь пора соединить пальцы в захват! Тип руки, которую вы создадите, полностью зависит от вас. Имейте в виду, что вам не обязательно конструировать руку человека с пятью пальцами.Например, вы можете сделать коготь с двумя клешнями (как краб или лобстер) или коготь с тремя или четырьмя симметричными пальцами (как в аркадных автоматах, которые поднимают чучело).
- Попробуйте соединить несколько пальцев. Используйте пластилин для лепки, чтобы сформировать основу или «ладонь» вашей руки, сформировав ее вокруг основы соломинки. Убедитесь, что вы не закрываете нижнее отверстие соломинки, чтобы можно было тянуть за веревку. Регулировка пластилина для лепки позволяет изменять положение и ориентацию пальцев относительно друг друга.
- В зависимости от типа пластилина, который у вас есть, вы можете дать ему высохнуть на воздухе и затвердеть, чтобы ваша рука работала лучше. (Может быть трудно работать рукой, пока глина еще мягкая. Некоторые виды глины могут быть достаточно твердыми с самого начала, поэтому они сразу подействуют.)
- Попробуйте потянуть за веревку (и), чтобы контролировать пальцы, когда они находятся на ладони. Возможно, вам придется внести некоторые изменения, чтобы все работало правильно. Какие изменения, по вашему мнению, вы можете внести, чтобы улучшить производительность своей руки?
- Теперь попробуйте взять рукой несколько мелких предметов. Имейте в виду, что ваша рука сделана из соломки, поэтому она не очень прочная, поэтому вы должны использовать ее только для подъема легких предметов (например, пустых пластиковых бутылок, а не бутылок с жидкостью).
- Ваши руки лучше поднимают одни предметы, чем другие? Не могли бы вы создать руку, специально предназначенную для хватания определенных предметов? Например, руки одного типа, чтобы поднимать цилиндрические предметы, такие как бутылки, а другие — для захвата сферических предметов, таких как теннисные мячи? Как вы думаете, будет ли сложно создать что-то столь же адаптивное, как человеческая рука, которая может легко подбирать предметы самой разной формы?
- Экстра: Прикрепите ладонь механической руки к концу трубки для картонного бумажного полотенца и проденьте в трубку нити.Теперь у вас есть захват с увеличенным радиусом действия, которым вы можете подбирать вещи!
- Extra: Пластиковые соломинки могут быть несколько скользкими, поэтому постарайтесь улучшить «хватку» механической руки. Например, обмотайте соломинку небольшими резиновыми лентами. Облегчает ли подъем вещей улучшение «захвата» соломинки?

Наблюдения и результаты
Вы должны уметь создавать искусственную руку, которая может поднимать легкие предметы, такие как мячи для пинг-понга, пустые пластиковые бутылки или маленькие мягкие игрушки.Из соломки и пластилина будет сложно построить руку, которая могла бы хватать более тяжелые предметы. Если вы хотите создать более сильную руку, вы можете заменить соломку и глину более прочными материалами из хозяйственного магазина (например, пластиковыми трубками для пальцев, металлическим кабелем для сухожилий и деревянным основанием с просверленными в нем отверстиями. для ладони).
Намного проще построить руку, в которой все пальцы и суставы управляются одной струной, и управлять ею (аналогично когтям стиля «аркадный автомат», где все пальцы открываются и закрываются одновременно).Гораздо сложнее построить сочлененную руку с несколькими суставами, которые управляются индивидуально, но это не должно отговаривать вас от попыток! Помните, что ваши собственные руки очень сложны, и профессиональные инженеры по сей день пытаются создать полностью функциональную роботизированную руку, эквивалентную человеческой.
Поскольку это деятельность по инженерному проектированию, не существует конкретной формулы, которой можно было бы следовать при построении руки. Дизайн может быть самым разным, и не существует «правильного» или «неправильного» способа сделать это.Вы можете обнаружить, что некоторые конструкции лучше выполняют различные функции. Если вы построили разные руки с разным количеством пальцев, какая из них окажется наиболее универсальной?
Больше для изучения
Захват трубочкой: сделайте руку робота, используя трубочку для питья, от друзей науки
Ваши чудесные руки, от здоровья детей
Научные занятия для всех возрастов, от друзей науки
Это мероприятие предоставлено вам в сотрудничестве с Science Buddies
Почему создание роботов, которые могут работать своими руками, сложнее, чем вы думаете
Чтобы роботы были наиболее полезными при работе вместе с людьми, нам нужно придумать, как создавать роботов, которые могут буквально протянуть нам руку, когда наша собственных двух недостаточно, — пишет Таскин Падир из Северо-Восточного университета.
Люди, особенно те, кто работает на производстве, довольно часто завязывают узел, снимают оболочку с кабеля, вставляют булавку в отверстие или используют ручной инструмент, например дрель. Они могут показаться простыми задачами, но на самом деле они очень сложны и требуют очень тонких движений пальцев и рук.
Хотя роботы все больше и больше привлекаются к работе на фабриках и к широкому спектру других видов работ, в том числе в сфере обслуживания и здравоохранения, их ловкость далеко не так впечатляет.С тех пор, как люди впервые привели их для работы на автомобильных заводах более 50 лет назад, мы создали роботов, которые могут довольно хорошо сваривать, красить и собирать детали. Лучшие современные роботы-руки могут подбирать знакомые предметы и перемещать их в другие места — например, брать продукты из складских ящиков и складывать их в ящики.
Но роботы не могут правильно сориентировать ручной инструмент — скажем, совмещая крестообразную отвертку с канавками на винте или наводя молоток на гвоздь.И они определенно не могут детально использовать две руки вместе, например, заменять батарейки в пульте дистанционного управления.
Человеческие руки отлично справляются с этими и многими другими задачами. Чтобы даже приблизиться к тому, чтобы конкурировать с тем, на что легко способны наши руки, руки роботов нуждаются в большей маневренности, надежности и силе — и они должны иметь возможность более точно чувствовать и двигаться даже более тонко, чем сейчас, чтобы понять, что они » как держать его и как лучше всего его схватить. Чтобы роботы могли работать вместе с людьми, нам нужно придумать, как создавать роботов, которые могут буквально протянуть нам руку помощи, когда наших двоих недостаточно.
Моя исследовательская группа в Северо-Восточном университете работает над этим, в частности, с роботами-гуманоидами, такими как Валькирия НАСА, у которой по три пальца и большой палец на каждой руке. У каждого пальца есть суставы, похожие на суставы, и у каждой руки есть запястье, которое легко вращается. Мы работаем над созданием движений — комбинаций движений руки, запястья, пальцев и большого пальца, которые вместе выполняют задачу, например, перемещение гаечного ключа по кругу для затягивания болта или перемещение тележки с одного места на другое.
Важность рук
Вместо того, чтобы делать каждого робота индивидуальной машиной, адаптированной для очень конкретной задачи, нам нужно разработать многоцелевых роботов или даже такие способные машины, которые можно было бы назвать «универсальными» — хорошо практически для любой задачи. Одним из ключей к успеху этих типов роботов будут отличные руки.
Наша работа сосредоточена на разработке нового класса адаптируемых рук роботов, способных к точным точным движениям и автономному захвату. Когда роботы смогут забивать гвозди, менять батарейки и совершать другие подобные движения — простые для людей, но очень сложные для роботов, — мы будем на пути к человеческой ловкости в руках роботов.
Достижение этой цели также связано с изобретением новых дизайнов, включающих твердые и мягкие элементы — так, как человеческая кость придает силу хватке, а кожа распределяет давление, чтобы бокал не разбился.
Более быстрая разработка и тестирование
Современные технологические усовершенствования упрощают процесс разработки. С помощью 3D-печати мы можем очень быстро создавать прототипы. Мы даже можем изготавливать недорогие одноразовые компоненты, чтобы опробовать различные схемы механизмов, например, двух- или трехпальцевые захваты для простых задач по подъему и перемещению или руки антропоморфных роботов для более деликатных операций.
По мере того, как электронные камеры и датчики становятся меньше, мы можем использовать их по-новому. Например, если мы поместим датчики давления и камеры в руку робота, они могут дать обратную связь контроллеру робота (будь то человеческий или автоматический), когда захват надежно или если что-то начинает соскальзывать. Однажды они смогут почувствовать, в каком направлении движется скользящий объект, и робот сможет его поймать.
Эти способности уже стали второй натурой людей благодаря зрению и проприоцепции (способность ощущать относительное положение частей тела, не глядя и не думая об этом).Как только мы сможем достичь этого с помощью роботов, они смогут делать такие вещи, как обнаруживать, слишком ли сильна хватка и слишком ли сильно сжимает ли объект.
Планирование скоординированных перемещений
Еще одной важной вехой станет разработка методов, позволяющих роботам определять, какие движения им нужно совершать в режиме реального времени, включая определение того, что происходит в их руках в каждый момент времени. Если рука робота может обнаруживать изменения в объектах, которые она обрабатывает, или манипулировать предметами, удерживая их, они могут помочь с такими общими ручными задачами, как завязывание узлов и снятие изоляции с проводов.
Работа двумя руками вместе — это еще более отдаленное будущее, хотя это даст значительный импульс, особенно для производства. Робот, который может управлять дрелью двумя руками или передавать детали машины из одной руки в другую, стал бы большим усовершенствованием, позволяя фабрикам автоматизировать еще больше этапов своих процессов.
Мы, люди, еще не разработали эти системы. Достижение маневренности автономных роботов, подобных человеческим, в обозримом будущем заставит исследователей, технологов и новаторов в области робототехники быть занятыми.Это не замедлит продолжающуюся революцию робототехники в производстве, потому что в текущих процессах еще есть много возможностей для автоматизации, чтобы повысить безопасность, скорость и качество. Но когда мы будем делать роботов еще лучше, они смогут нам помочь.
(Верхнее изображение: любезно предоставлено Getty Images.)
Эта часть впервые появилась в The Conversation.
Таскин Падир — доцент кафедры электротехники и вычислительной техники Северо-Восточного университета.
Все высказанные мнения принадлежат автору.
Как сделать простую роботизированную руку своими руками {Бесплатная версия для печати!}
- Facebook842
- Pinterest5287
Ваши дети могут сделать роботизированную руку за несколько простых шагов! Этот проект STEM выполняет требования к приключению Cub Scout Bear Robotics.
Как вообще можно сделать руку робота Cub Scout? Я так отреагировал, когда увидел, что это одно из требований к избирательному приключению Медведя, Робототехника.
Это требование 3. Собери руку робота. Покажите, как он работает как человеческая рука и чем отличается от человеческой руки.
Я искал проект STEM для руки робота и нашел планы того, что, как я думал, будет отличной рукой робота Cub Scout. Но разведчикам пришлось бы использовать универсальный нож , чтобы прорезать зазубрины в пластиковых соломинках.
Нет, спасибо! Я думаю, что это не тот навык, которым обладают разведчики-медвежата третьего класса. У нас достаточно дел на собраниях в кабинете без походов в скорую за наложением швов!
Наконец-то нашел на план как сделать роботу руку! Это выглядело просто, и с некоторыми изменениями оно идеально подходит для наших Медведей.
Вы захотите ознакомиться с этими инструкциями по изготовлению щетины!
Принадлежности для руки робота-разведчика Cub Scout
Я попытался провести рукой по картону, но это не сработало! Итак, я решил, что создам руку для печати, которую вы сможете использовать в своем логове. Это сэкономит много времени!
Вот как выглядит шаблон руки робота для печати. «Суставы» отмечены, чтобы было легче складывать пальцы.
Вы можете скачать руку , введя свой адрес электронной почты ниже.
Мои соломинки были гибкими, и поскольку вы не можете использовать гибкую часть, мне пришлось использовать 2 соломинки . Если у вас негибкая трубочка, возможно, вы сможете использовать только 1 соломинку.
Измерения не обязательно должны быть точными . До тех пор, пока кусочки соломы будут соответствовать участкам пальца с небольшим пространством на каждом конце соломинки, она будет работать нормально.
Вам нужна трубочка для смузи , потому что ее отверстие намного больше.Это облегчает движение пальцами.
Для этого проекта вы можете использовать пряжу, но у некоторых Скаутов могут возникнуть трудности с продеванием ее через соломинку. Я обнаружил, что такую ленту 1/8 ″ было намного проще использовать , потому что она «жестче», чем пряжа.
Лента должна быть шириной 1/2 дюйма. Большая часть ленты, которую вы увидите при покупке, составляет 3/4 дюйма, но это слишком широко. Если вы хотите использовать более широкую ленту, вам придется порвать ее на полоски.
Как построить руку робота-разведчика детеныша
- Распечатайте руку на карточке и вырежьте ее .
- Сложите пальцы по линиям соединения.
- Разрежьте обычную соломинку на 11 частей длиной примерно 5/8 дюйма. Отрежьте 3 части длиной примерно 3/8 дюйма.
- Нарежьте соломинку для смузи на кусочки размером 2 — 1/2 дюйма.
- Разрежьте ленту на отрезки длиной 18 дюймов. При желании можно использовать 5 разных цветов, чтобы Медведи знали, какая лента каким пальцем управляет.
- Выложите 3 части соломинки 5/8 ″ на столе.Это будет для одного пальца.
- Проденьте ленту через каждую часть соломинки. Скауты должны подталкивать соломинку до середины ленты.
- Оторвите кусочки ленты , достаточно длинные, чтобы они прошли через соломинку и обернулись вокруг тыльной стороны пальца. Повесьте их на край стола, чтобы их было легко схватить.
- Осторожно натяните ленту на один из пальцев. Я начал с указательного пальца. Затем приклейте по одной соломке к каждой секции пальца .Убедитесь, что части не слишком близко друг к другу, иначе палец не сможет хорошо согнуться. Лента должна полностью оборачиваться вокруг пальца. Я этого не делал, и когда мой сын натянул одну из лент, кусок соломы тоже оторвался.
- Когда части будут приклеены к одному пальцу, согните около 1 1/2 дюйма ленты на конец пальца и прикрепите липкой лентой к тыльной стороне.
- Повторите шаги с 6 по 10 для другого пальца, за исключением мизинца, где вы будете использовать кусочки соломинки 3/8 дюйма.
- Когда все части будут приклеены, проденьте все 5 лент через кусок соломинки для смузи. Вы можете делать это по одному или все сразу. Приклейте соломку для смузи на ладонь.
Ваша рука робота Cub Scout готова к работе ! Просто потяните за ленту пальца, который хотите переместить.
Не забывайте, что завершение приключения в робототехнике будет соответствовать требованиям для 1-2-3 Go! Награда Nova и награда Out of This World Nova.
Попросите детей попробовать некоторые из этих сигналов :
- Большой палец вверх
- «Я люблю тебя»
- ОК
- Шака (я всегда называл это «Повесить 10»)
Попросите скаутов назвать некоторые вещи, которые могут делать их руки, чего не может рука робота-робота Cub Scout . Я придумал раздвигать пальцы, двигать ими из стороны в сторону и вращать их.
Время подготовки 5 минут
Активное время 20 минут
Общее время 25 минут
Сложность Середина
Сметная стоимость 1 доллар
Инструкции
- Распечатайте руку на картоне и вырежьте ее
- Сложите пальцы по линиям соединения
- Разрежьте две соломинки для питья на кусочки размером 11–5/8 дюйма
- Разрежьте оставшийся кусок соломы на 3–3 / 8 дюймов
- Нарежьте соломку для смузи на кусочки 2–1 / 2 дюйма
- Разрежьте ленту на кусочки 5–18 дюймов
- Выровняйте 3 части соломинки 5/8 дюйма на столе
- Проденьте ленту через каждую соломинку.Скауты должны проталкивать соломинку до середины ленты.
- Оторвите куски ленты достаточной длины, чтобы они прошли через соломинку и обернулись вокруг тыльной стороны пальца. Повесьте их на край стола, чтобы их было легко схватить.
- Осторожно натяните ленту на один из пальцев. Я начал с указательного пальца. Затем приклейте по одной соломке к каждой части пальца. Убедитесь, что части не слишком близко друг к другу, иначе палец не сможет хорошо согнуться. Лента должна полностью оборачиваться вокруг пальца.Я этого не делал, и когда мой сын натянул одну из лент, кусок соломы тоже оторвался.
- Когда части приклеены к одному пальцу, согните около 1 1/2 дюйма ленты на конец пальца и прикрепите ее к задней части.
- Повторите шаги с 7 по 11 для другого пальца, за исключением мизинца где вы будете использовать 3/8 дюйма соломинки.
- Когда все части будут приклеены, проденьте все 5 лент через соломинку для смузи. Вы можете делать это по одному или все сразу.Приклейте соломку для смузи на ладонь.
Что ваши детеныши-разведчики заставили делать свои руки-роботы? Оставьте мне комментарий и дайте мне знать!
Yours in Scouting,
Шерри
П.С. Если ваш Cub Scout действительно любит робототехнику, ознакомьтесь с этими наборами «собери своего робота»!
- Facebook842
- Pinterest5287
Как сделать рабочую модель руки робота
Важная редакция
Мы придумали более простой способ сделать тыльную сторону ладони.
Образец
Вам понадобится выкройка для руки, которую можно распечатать. При распечатке убедитесь, что изображение не увеличено или уменьшено в масштабе. Не оставляйте флажки с надписью «По размеру страницы» или что-то в этом роде. Также измерьте масштаб проверки; он должен быть 2 дюйма или 5 см. PDF
Введение
Часть 1 — это введение, которое начинается с научного роуд-шоу в начальной школе, где мы заставляем детей задуматься о том, как работают их руки.Мы утверждаем, что мышцы, которые двигают наши пальцы, находятся не в наших пальцах! Наши пальцы такие сильные и в то же время такие подвижные, потому что струны, называемые сухожилиями, соединяют части наших пальцев с большими мышцами предплечий. Если YouTube заблокирован в вашей школе, попробуйте эту ссылку Schooltube, часть 1.
Указания, материалы,
Note
Этот метод крепления струн на тыльной стороне ладони устарел. Пожалуйста, посмотрите исправленную версию выше.
Часть 2 фактически начинает инструкции, начиная со списка всех материалов, которые вам понадобятся, а затем показывает, как вделать струны в силикон на тыльной стороне руки. (См. «Важная редакция» выше для лучшего метода). Вы можете распечатать выкройку руки в формате PDF. При распечатке убедитесь, что изображение не увеличено или уменьшено в масштабе. Не оставляйте флажки с надписью «По размеру страницы» или что-то в этом роде. Также измерьте масштаб проверки; он должен быть 2 дюйма или 5 см.Если YouTube заблокирован в вашей школе, попробуйте эту ссылку Schooltube, часть 2.
Передняя часть ладони
Часть 3 начинается примерно через день после того, как силикон на тыльной стороне затвердеет. Затем на передней части руки вы закрепляете 5 соломинок силиконом и обматываете их тонкой бусиной силикона. Если YouTube заблокирован в вашей школе, попробуйте эту ссылку SchoolTube, часть 3
Чистовая
Часть 4, заключительная часть, посвящена вырезанию выемок на пальцах, чтобы можно было сгибать каждый палец в трех местах.Затем продеваете струны через соломинку и поздравляете! Вы своими руками сделали рабочую модель руки! Бьюсь об заклад, вы никогда не забудете, как работают ваши руки. Если в вашей школе заблокирован YouTube, попробуйте эту ссылку на SchoolTube. Часть 4
Создайте искусственную руку — Блог об образовательных инновациях
Создание и изготовление искусственной руки — отличный проект для научной ярмарки или учебного класса. Это также яркий, практический способ заставить ваших учеников задуматься о том, как такие роботизированные конечности используются в обществе и промышленности.Независимо от того, работают ли ваши ученики индивидуально или в команде, это занятие — фантастический опыт в творчестве, решении проблем, STEM и инженерии. Кроме того, для некоторых студентов это может даже послужить источником вдохновения для будущей карьеры!
Какова ваша цель?В реальном мире протезы или протезы улучшают качество жизни людей с ампутированными конечностями, предоставляя больше свободы и независимости. В мире производства роботизированные придатки создали совершенно новый способ производства продукции.Обе ситуации требуют, чтобы дизайнеры глубоко задумались о том, как заставить свои искусственные творения выполнять уникальную задачу.
Дайте ученикам возможность решить, что им делать с протезом руки, в классе. Будет ли он использоваться, чтобы приветствовать вас? Чтобы нажать клавишу на клавиатуре или пианино? Удерживать мяч для пинг-понга или воздушный шар? Как только учащиеся решат уникальную задачу, которую они надеются решить, они готовы начать думать о процессе проектирования.
Если учащиеся хотят выполнить это задание для научной ярмарки, им нужно будет придумать переменную для проверки и важный вопрос для изучения.
Искусственная рука ОсновыОчевидно, что есть много способов создать искусственную руку — все зависит от вашей цели. В любом случае будет полезно быстрое изучение анатомии человека. Как работает человеческая рука? Рассмотрим пальцы — длинные, гибкие и твердые. Затем идут суставы, связки, мышцы и сухожилия, которые выполняют работу по сгибанию и растяжению. А как насчет ладони? Если он будет участвовать в работе по удержанию объекта, ладонь должна быть прочной.Но опять же, некоторым механическим «рукам», например клешням, даже не нужна ладонь.
Для начала вы можете поделиться этими инструкциями для простого бумажного искусственного пальца руки:
Материалы:- Картонная пластина (но можно также использовать толстую бумагу или тонкий картон)
- Пластиковые соломинки (пяти или шести должно быть достаточно)
- Карандаш или ручка
- Ножницы
- Клей или пистолет для клея
- Лента (любого вида липкой ленты)
- Пять отрезков бечевки, каждая длиной не менее 10 дюймов
- Латексная перчатка (необязательно)
Десять
шагов для создания искусственной рукиШаг 1 — Выберите материал для руки.Используйте толстую бумагу, тонкий картон или бумажную тарелку.
Шаг 2 — Обведите свою руку. Разведите пальцы на расстоянии от ½ дюйма до 1 дюйма в поперечнике, чтобы расстояние между ними было правильным.
Step 3 — Аккуратно вырежьте нарисованную руку.
Шаг 4 — Нарежьте пластиковую соломку на кусочки. Вам понадобится девять частей примерно по два дюйма каждая. Вы можете разрезать соломку прямо поперек или под углом — на ваш выбор.
Шаг 5 — В середине каждой секции соломинки вырежьте небольшую V-образную выемку.
Шаг 6 — На бумаге определите, где должны быть стыки. Осмотрите свою руку, чтобы определить, где сделать отметку. Нарисуйте линию, которая начинается примерно на дюйм ниже большого пальца и примерно на дюйм ниже вашего мизинца.
Шаг 7 — Приклейте кусочки соломки на руку. Используйте по три соломинки на каждый палец — по одной на сустав. Для большого пальца понадобится всего две штуки.
Шаг 8 — Приклейте пять кусочков соломки к ладони, где вы провели линию, соединяющую область большого пальца и мизинца.
Шаг 9 — После высыхания клея проденьте веревку через каждую соломку. Вам понадобится по одной струне для каждого пальца. Используйте ленту, чтобы закрепить шнурок на кончике пальца. Проденьте каждую нить через соломинку к запястью. Оставьте около четырех дюймов веревки, свисающей с запястья.
Шаг 10 — Протестируйте! Осторожно потяните за каждую струну, чтобы убедиться, что палец работает. Когда все заработает, можно накрыть искусственную руку латексной перчаткой (для лучшего захвата).
Улучшение искусственной рукиДаже самый лучший дизайн можно улучшить, и это, безусловно, применимо и здесь. Прототипы ваших учеников могут быть функциональными, но можно ли их улучшить? После изучения анатомии человека важность кожи должна стать очевидной. Он не только защищает, но и помогает при захвате. Студенты могут захотеть прикрыть руку робота латексной или нитриловой перчаткой или обмотать несколько резинок вокруг кончиков пальцев для лучшего захвата.
Вопросы к обсуждениюКогда искусственная рука будет завершена, попросите учащихся обсудить свое творение.
- Довольны ли они дизайном?
- Сработало ли оно так, как им хотелось?
- Могут ли они изменить или подправить свой прототип?
- Какие уроки о дизайне и прототипах они могли бы применить к другим проектам?
На шаг дальше
В образовательных инновациях мы знаем, что вы всегда ищете передовые научные инструменты для своего класса.Вот почему мы так взволнованы набором для нейропротезирования Backyard Brains DIY. Это дополнительный набор, который позволяет ученикам строить руки киборга, которыми они могут управлять с помощью своей нервной системы! Этот комплект подключается и, следовательно, требует любого набора, который включает Muscle SpikerShield, например Muscle SpikerBox, Claw Bundle или Human-Human Interface.