Феномен Bose: почему лучшая в мире подвеска до сих пор не стала серийной
Bose – не бренд, но человек
Как и многое революционное в мире, технология принципиально новой автомобильной подвески обязана своим появлением человеку, который был достаточно решителен, чтобы отрицать невозможное. Его имя — Амар Боуз.
Амар Боуз (Amar Bose), 1929-2013 Если вы считаете что-то невозможным, не мешайте человеку, который над этим работает.
Американец индийского происхождения, он и сам нес в себе немало революционного: его отец в юности был на острие борьбы индийских революционеров с английскими колонизаторами. Амару повезло больше: он родился уже после переезда отца в США, но дух новаторства и стремление расширять границы возможного передались ему по наследству, воплотившись в его самореализации в технике.
Будучи страстным увлеченным меломаном, он посвятил себя акустике и аудиотехнике.
На фото: Pontiac Bonneville ‘1962 и Citroen DS ‘1968–76
В 1980 году, уже будучи владельцем собственной компании, профессор в одиночку начал разработку совершенно нового типа автомобильной подвески, используя свой опыт и знания в совершенно несопоставимой на первый взгляд сфере аудиотехники.
Технологическая магия
Подвеска, спроектированная профессором, буквально «подавляла» колебания, поступающие извне. Убедившись, что идея жизнеспособна, через три года после начала своих изысканий Боуз привлек к работе над ней отдельную команду, но тщательно засекретил разработку. Подразделение, занятое ей, получило имя «Project Sound», чтобы не распространять информацию не только вовне, но и внутри самой компании. Что же представляет собой изобретение Bose, и что в нем революционного?
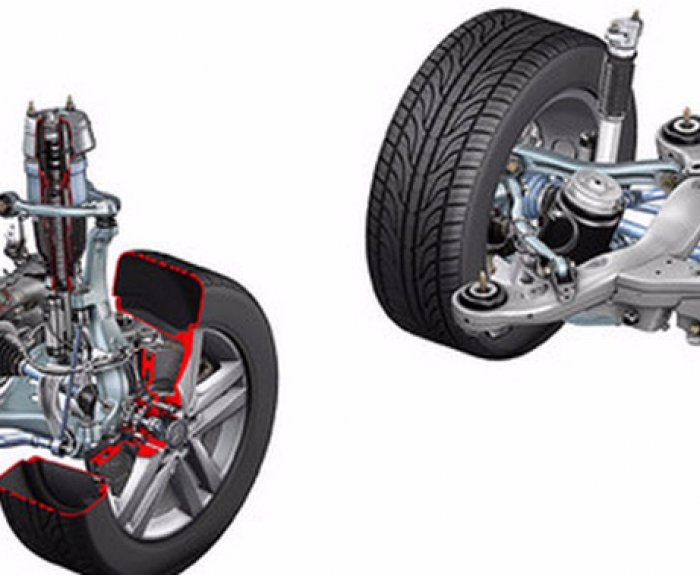
Основой конструкции является линейный электромотор, питаемый усилителями и управляемый системой на основе микропроцессора. Электромотор выполняет функции амортизационной стойки: он «сжимается» и «разжимается», но делает это в разы быстрее обычного амортизатора с пружиной, изменяя свою длину за миллисекунды.
И это было не единственным преимуществом электромоторов. Разумеется, столь сложная и мощная электронная система, несущая большую нагрузку в виде автомобиля, требовала соответствующего питания. Однако эта особенность во многом компенсировалась схемой работы моторов: они имели рекуперативную функцию, возвращая обратно на усилители часть затраченной энергии в циклах сжатия. По данным Bose, такая схема позволяла обеспечить потребляемую мощность на уровне втрое меньшем, чем у штатной системы кондиционирования автомобиля.
По данным Bose, такая схема позволяла обеспечить потребляемую мощность на уровне втрое меньшем, чем у штатной системы кондиционирования автомобиля.
Но и это еще не все! Во-первых, конструкция подвески предусматривала гашение не только крупных, но и мельчайших неровностей, проявляющих себя на уровне вибраций. Для этого ступичные узлы имели собственные встроенные демпферы, подавляющие микроколебания. Ну а во-вторых, программный комплекс обеспечивал идеально стабильное положение кузова автомобиля не только на неровностях, но и при маневрировании, полностью исключая поперечную раскачку в поворотах и продольную при разгонах и торможениях. «Железную» же основу подвески составляли торсионы, которые, впрочем, выполняли фактически лишь несущую функцию для кузова, оставляя всю настоящую работу системе от Bose.
Амар Боуз (Amar Bose), 1929-2013 Впервые подвеска может быть одинаковой и для спортивного, и для люксового автомобиля.
Работа над революционной подвеской продолжалась долгие 24 года: Боуз рассекретил свое детище только в 2004-м, представив его широкой публике, но так, впрочем, и не разрешив даже журналистам опробовать его в деле.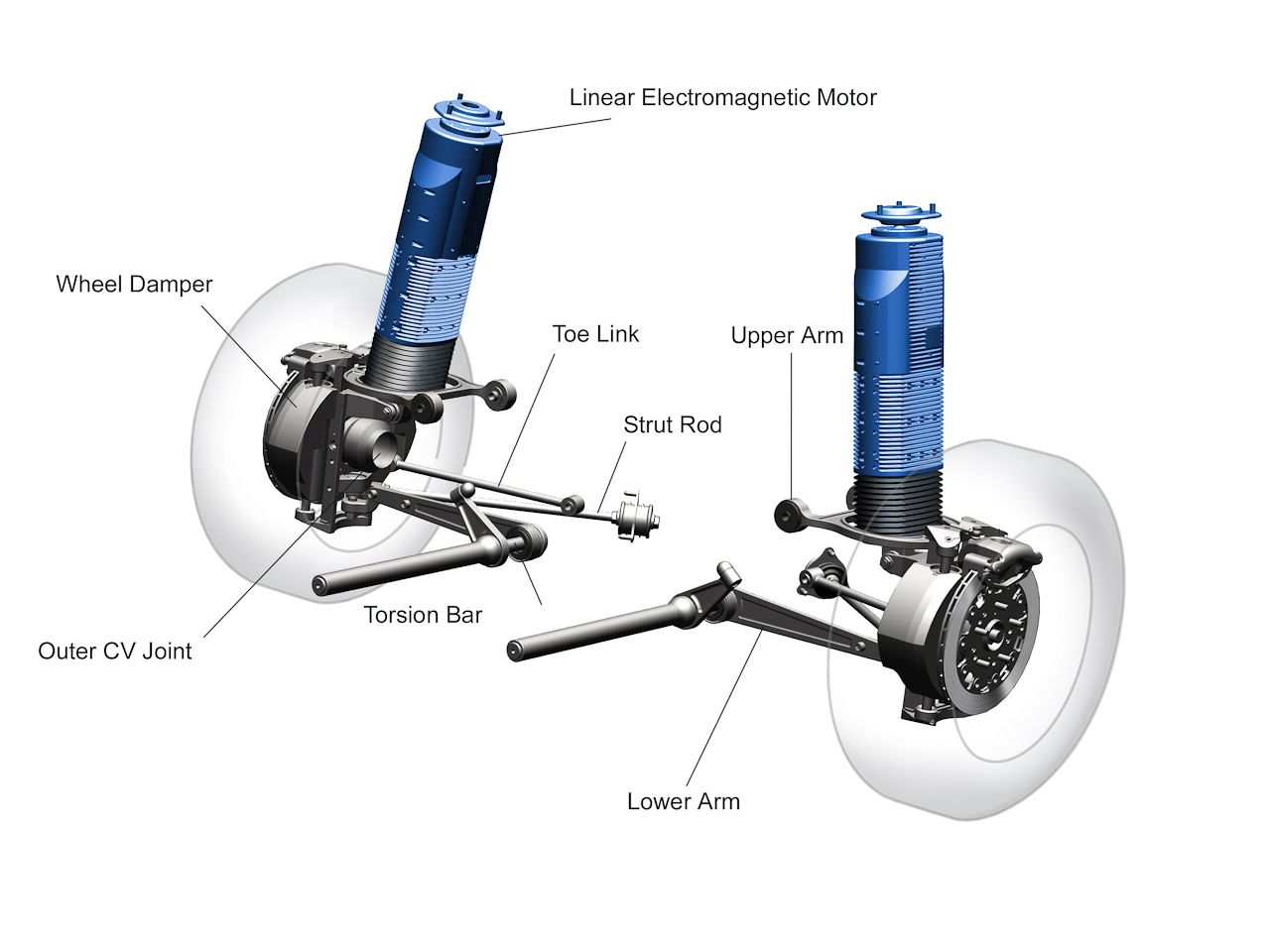 Но и без этого презентация произвела ошеломляющий эффект: это была настоящая технологическая магия, все отзывы и рассказы о которой сводились к главному – тому, что «кузов невероятным образом оставался абсолютно неподвижным, пока колеса отрабатывали все неровности». Тестовыми прототипами стали два седана Lexus LS 400, один из которых был оставлен в заводском исполнении, а другой оснащен комплексом от Bose. И этот комплекс, управляемый тогда, в 2004-м, 750-мегагерцовым Pentium-III, работающим на четверть своей производительности, был настоящей квинтэссенцией сути автомобильной подвески.
Но и без этого презентация произвела ошеломляющий эффект: это была настоящая технологическая магия, все отзывы и рассказы о которой сводились к главному – тому, что «кузов невероятным образом оставался абсолютно неподвижным, пока колеса отрабатывали все неровности». Тестовыми прототипами стали два седана Lexus LS 400, один из которых был оставлен в заводском исполнении, а другой оснащен комплексом от Bose. И этот комплекс, управляемый тогда, в 2004-м, 750-мегагерцовым Pentium-III, работающим на четверть своей производительности, был настоящей квинтэссенцией сути автомобильной подвески.
Амар Боуз (Amar Bose), 1929-2013 В современных автомобилях всегда существует компромисс между мягкостью на неровностях и раскачкой при маневрировании. Эта система обеспечивает управляемость лучшую, чем у любого спорткара, и самую высокую плавность хода, которую только можно представить.
К слову, будучи управляемой программно, подвеска от Bose позволяла вносить изменения в алгоритмы ее работы и создавать алгоритмы различных режимов движения.
Один из журналистов, побывавших на презентации подвески Bose, так описал свои первые впечатления от этой технологии.
Джон ДиПьетро Edmunds.com Сначала нас привели ангар, где два автомобиля были установлены бок о бок на вибростендах с четырьмя отдельными опорами, по одной на колесо. Каждая из опор могла подниматься и опускаться в различных диапазонах перемещения и скорости, имитируя неровности дороги. Но, не удовлетворившись имеющейся программной технологией имитации дороги, в Bose разработали свою собственную.
 Проехав круг по настоящей дороге, изобилующей кочками, выбоинами и ямами, инженеры программно перенесли ее на стенды. Кроме того, они разработали для машины, оборудованной подвеской Bose, режим, имитирующий заводскую подвеску, с возможностью переключаться между ним и фирменным режимом Bose по нажатию кнопки.</strong></p>
<p><strong>Двое из нас сели в машины, и инженеры запустили вибростенды. Сначала автомобиль с подвеской Bose был переведен в режим заводской подвески, и мы ощущали колебания, хоть и несильные, и раскачку машины можно было наблюдать в зеркала, расположенные снаружи автомобиля для наглядности. Другой LS 400, без подвески Bose, колебался абсолютно так же – мы «двигались» по одной и той же дороге. Затем инженер нажатием кнопки перевел подвеску Bose в ее нормальный режим – разница была ошеломляющей. В зеркала снаружи было хорошо видно, что колеса продолжают перемещаться вверх и вниз в такт колесам стандартного автомобиля рядом с нами, но кузов оставался настолько неподвижным, что в салоне можно было пить кофе, не пролив ни капли.
Проехав круг по настоящей дороге, изобилующей кочками, выбоинами и ямами, инженеры программно перенесли ее на стенды. Кроме того, они разработали для машины, оборудованной подвеской Bose, режим, имитирующий заводскую подвеску, с возможностью переключаться между ним и фирменным режимом Bose по нажатию кнопки.</strong></p>
<p><strong>Двое из нас сели в машины, и инженеры запустили вибростенды. Сначала автомобиль с подвеской Bose был переведен в режим заводской подвески, и мы ощущали колебания, хоть и несильные, и раскачку машины можно было наблюдать в зеркала, расположенные снаружи автомобиля для наглядности. Другой LS 400, без подвески Bose, колебался абсолютно так же – мы «двигались» по одной и той же дороге. Затем инженер нажатием кнопки перевел подвеску Bose в ее нормальный режим – разница была ошеломляющей. В зеркала снаружи было хорошо видно, что колеса продолжают перемещаться вверх и вниз в такт колесам стандартного автомобиля рядом с нами, но кузов оставался настолько неподвижным, что в салоне можно было пить кофе, не пролив ни капли.
Остальную часть презентации, тщательно составленной специалистами Bose, можно и нужно видеть своими глазами. Автомобиль преодолевает неровности, входит в повороты, разгоняется и тормозит – и все это без малейшего колебания кузова. Финальным аккордом в этом шоу был трюк, в котором автомобиль с подвеской Bose легко и плавно перепрыгивает деревянную планку, имитирующую препятствие, а затем «кланяется» вместе с водителем, вышедшим из машины. Эта часть, конечно была просто демонстрацией возможностей: инженеры не планировали подобную опцию в серийной реализации. Но впечатление на зрителей этот прыжок производил исправно, начиная с 2004 года – ведь подобные презентации в Bose проводили не только для журналистов, но и для потенциальных партнеров, которые могли бы заинтересоваться их технологией.
Слишком смело для рынка
Но вот как раз с потенциальными партнерами ситуация складывалась не так ярко, как с разработкой и практической реализацией. Разумеется, главными целевыми потребителями своей технологии в Bose видели крупных производителей люксовых автомобилей – как спортивных, так и представительских. Ferrari, Jaguar, Mercedes, Honda и другие были заинтересованы в том, чтобы применять новую подвеску в своих автомобилях. Каждый, кто испытывал лично изобретение Bose, неизменно говорил, что это лучшая подвеска, которую он когда-либо видел. Но когда дело доходило до цифр, все с миной сожаления закрывали свои папки и отправлялись домой, чтобы «обдумать» предложение, которое не решился принять никто.
Разумеется, главными целевыми потребителями своей технологии в Bose видели крупных производителей люксовых автомобилей – как спортивных, так и представительских. Ferrari, Jaguar, Mercedes, Honda и другие были заинтересованы в том, чтобы применять новую подвеску в своих автомобилях. Каждый, кто испытывал лично изобретение Bose, неизменно говорил, что это лучшая подвеска, которую он когда-либо видел. Но когда дело доходило до цифр, все с миной сожаления закрывали свои папки и отправлялись домой, чтобы «обдумать» предложение, которое не решился принять никто.
Амар Боуз (Amar Bose), 1929-2013 У меня нет сомнений в том, что эта технология может стать успешной на рынке. Но для этого требуется компания, которая интересуется чем-то большим, чем дизайн и лошадиные силы.
Помимо усложняющей автомобиль электрической обвязки на момент разработки стоимость некоторых компонентов была весьма высока, усложняя серийное производство и удорожая конечный продукт. К примеру, помимо микропроцессора «узким местом» были мощные неодимовые магниты, материал для производства которых был дорог. Но это было не главной проблемой: профессор Боуз был совершенно прав, предсказав, что в будущем стоимость этих компонентов снизится до приемлемой.
К примеру, помимо микропроцессора «узким местом» были мощные неодимовые магниты, материал для производства которых был дорог. Но это было не главной проблемой: профессор Боуз был совершенно прав, предсказав, что в будущем стоимость этих компонентов снизится до приемлемой.
Но вот избавить систему от двух других недостатков оказалось не так легко, и первым из них стала масса конструкции. Целевой показатель увеличения веса автомобиля, по расчетам инженеров, составлял 90 килограммов – именно столько, почти центнер, должна была прибавить подвеска автомобиля с системой Bose по сравнению с обычной. Конечно, здесь рост неподрессоренной массы не оказывал никакого негативного влияния на плавность хода и устойчивость автомобиля – напротив, эти показатели вырастали до небывалых высот. Но вот ухудшение динамики и повышение расход
принцип работы и виды магнитных подвесок
Подвеска автомобиля достаточно консервативна. Несмотря на совершенствование отдельных её составляющих, общий принцип построения не меняется. Упругие элементы и демпферы на гидравлических и пневматических элементах, сложная механика направляющего аппарата. Радикально улучшить работу тут можно только применив активное управление характеристиками, с большой скоростью отслеживая изменение профиля дороги и нагрузки.
Упругие элементы и демпферы на гидравлических и пневматических элементах, сложная механика направляющего аппарата. Радикально улучшить работу тут можно только применив активное управление характеристиками, с большой скоростью отслеживая изменение профиля дороги и нагрузки.
Содержание статьи:
Что надо знать об электромагнитной подвеске
Быстрее всего работают узлы и элементы, использующие электромагнитное взаимодействие между составными частями.
Такие устройства способны максимально оперативно реагировать на внешние воздействия, получая команды от электронного контроллера.
Принцип работы
Известно, что одноимённые полюса магнитов отталкиваются. Если магниты выполнены с электрической активацией, то такое устройство называется электромагнитом. Изменяя величину тока, проходящего по обмоткам электромагнитов можно регулировать силу их отталкивания.
Читайте также: Что такое адаптивный круиз-контроль (ACC)
Всё это позволяет использовать конструкцию из двух и более магнитов, как эффективную и быстродействующую пружину, поскольку внешний эффект совершенно идентичен стальной рессоре или её спиральному аналогу – пружине.
Получившаяся электромагнитная пружина обладает чрезвычайно полезным свойством мгновенной реакции на управляющее воздействие. Никаким другим способом добиться такой скорости невозможно, гидравлика и пневматика имеют задержки, измеряемые секундами, что для быстрого изменения мгновенной жёсткости неприемлемо.
Имея такой мощный инструмент в подвеске конструкторам остаётся только построить электронный блок управления, снабдить его нужным набором датчиков и разработать соответствующее программное обеспечение управляющего микрокомпьютера.
Теоретически такая задача легко выполнима, хотя на практике и выявляются определённые сложности. Как обычно, всё упирается в цену вопроса. Особенно если это касается крупносерийного производства. Можно создать идеально работающую систему, но в массовом выпуске она не будет обладать нужной конкурентоспособностью.
Ещё один путь внедрения электротехники в подвеску – это применение её в демпфирующих элементах более традиционной гидравлической конструкции.
Здесь можно поступить двумя способами:
- управлять электрогидравлическими клапанами, через которые перетекает рабочая жидкость амортизатора, уменьшение сечения переходного отверстия ведёт к повышению эффективной жёсткости узла и наоборот, амортизатор работает мягче, если масло в нём перетекает свободно;
- тот же эффект даст изменение свойств самой жидкости под воздействием внешнего электромагнитного поля, такие смеси существуют, в них используется принцип пространственной ориентации ферромагнитных частиц.
Второй способ даёт большее быстродействие, но и стоит дороже, поскольку подобные жидкости высокотехнологичны и сложны в производстве.
Виды магнитных подвесок
Разные компании в разработке пошли по своим направлением, руководствуясь внутренними программами и конечными целями.
Это интересно: Устройство и работа инжектора в автомобиле
Принято выделять концепции подвесок от американской компании Delphi Corporation, известной шведской фирмы SKF и идею профессора Bose, чьё имя в названии компании стало синонимом особо качественных акустических систем для автомобилей.
Delphi
Относительная простота этой системы не означает её примитивность или плохую эффективность.
Несмотря на то, что электромагниты здесь управляют только свойствами амортизаторной жидкости, точное воздействие на мгновенную жёсткость демпфера даёт подвеске совершенно новые свойства. Скорость изменения характеристик амортизатора здесь многократно выше, чем у традиционных активных гидравлических демпферов.
Это достигается специальной жидкостью, которая настолько точно и эффективно меняет свою вязкость под воздействием управляющего тока электромагнита, что особой надобности в изменении жёсткости упругого элемента не возникает.
Сильная зависимость работы подвески именно от свойств амортизатора известна давно, их подбору уделяется особое внимание в автоспорте, а там каждая секунда пребывания автомобиля на трассе имеет решающее значение. Характеристики пружин не так важны.
В амортизаторах электронной подвески Delphi использована разработанная компанией жидкость с микрочастицами, которые могут выстраиваться вдоль линий магнитного поля, резко меняя характер перетекания её через калиброванные отверстия.
Измеряемые микронами габариты частиц позволяют добиться большого быстродействия за счёт минимальной инерции. То же качество обеспечивает и минимальное потребление тока обмотками магнитов, что очень важно для общей экономичности автомобиля и упрощения силовой электроники.
Нужная информация снимается с датчиков подвески и других систем автомобиля, обрабатываясь в электронном блоке управления подвеской.
SKF
Шведская компания пошла другим путём. Не касаясь гидравлических амортизаторов, всё внимание было уделено скорости изменения характеристик упругого элемента.
Для этого в него была интегрирована специальная капсула, содержащая два мощных электромагнита. Меняя их поле взаимодействия можно настолько быстро реагировать на ситуацию, что данное устройство способно выступать в роли как упругого, так и демпфирующего элементов.
Ведь суть демпфирования состоит в динамическом изменении жёсткости, вплоть до смены знака вектора силы с отталкивания на притяжение.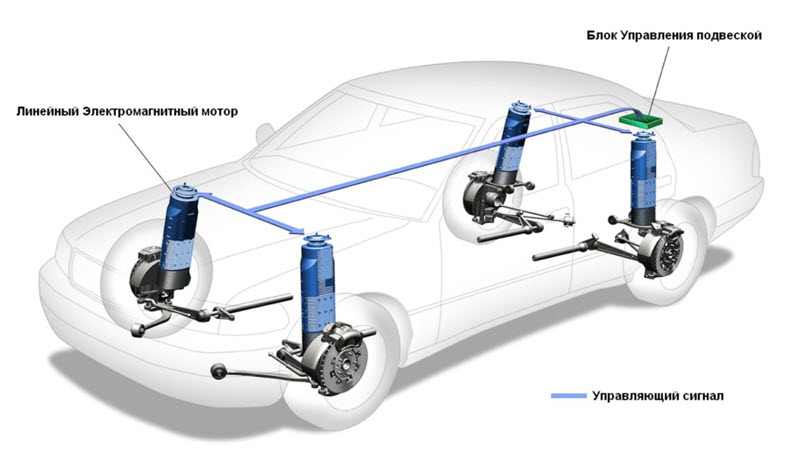 Таким способом компьютер может погасить любые колебания, лишь бы хватило быстродействия и диапазона изменения силы взаимодействия электромагнитов. А это уже вопросы технологического исполнения.
Таким способом компьютер может погасить любые колебания, лишь бы хватило быстродействия и диапазона изменения силы взаимодействия электромагнитов. А это уже вопросы технологического исполнения.
Потребляемая мощность здесь значительно выше, чем у чисто статического режима работы электромагнитов гидравлических активных амортизаторов.
Но до неприемлемых величин она не возрастает, реально сравниваясь с более традиционными потребителями вроде климатической системы или электрического отопителя, а чтобы избежать полного отказа подвески в случае поломок электрооборудования в подвеске сохранены традиционные пружины, частично резервирующие электромагнитное оборудование.
Bose
Много занимавшийся акустикой профессор Bose ближе к концу 20 века увлёкся идеей создания идеальной автомобильной подвески. Неудивительно что исполнительный элемент нем
Неудивительно что исполнительный элемент нем
Электромагнитная подвеска
- Главная
-
Публикации
- Здоровье
- Тесты
- Знаки зодиака
- Эзотерика
- Реальная история
- Психология
- Красота
- Юмор
- Полезно знать
- Знаменитости
- Похудение и диета
- Фото галерея
- Отношения
- Дети
- Религия
- Вокруг света
- Музыка
- Познавательное
- Животный мир
- Мода
- Поэзия
- Притчи
- Интересное
- Интерьер
- Кухня
- Авто
- Фильмы
- Видео
- Тесты
- Кухня
- Авто
- Популярные
- Главная
-
Публикации
- Здоровье
- Тесты
- Знаки зодиака
- Эзотерика
- Реальная история
- Психология
- Красота
- Юмор
- Полезно знать
- Знаменитости
- Похудение и диета
- Фото галерея
- Отношения
- Дети
- Религия
- Вокруг света
- Музыка
- Познавательное
- Животный мир
- Мода
- Поэзия
- Притчи
- Интересное
- Интерьер
- Кухня
- Авто
- Фильмы
- Видео
- Тесты
- Кухня
- Авто
- Популярные
Bose продает свою революционную электромагнитную подвеску
Этот сайт может получать партнерские комиссии по ссылкам на этой странице. Условия эксплуатации.
Условия эксплуатации.Спустя тридцать семь лет после того, как д-ру Амару Бозе пришла в голову идея усовершенствовать электромагнитный драйвер громкоговорителя в качестве адаптивной автомобильной подвески, Bose продает технологию ClearMotion, другой технологической компании из Бостона, основанной выпускниками Массачусетского технологического института.Компания Bose дошла до разработки прототипов автомобилей, которые были выставлены в 2004 году, но выпустила на рынок ответвление сидений с электромагнитной подвеской для водителей дальних грузовиков.
Немодифицированная подвеска и подвеска Bose на ухабистой дороге, 2004 г.
Генезис электромагнитной подвески
При внедрении технологии в штаб-квартире Bose в Фрамингеме, штат Массачусетс, в 2004 г. Амар Боз сказал: «Это первый раз Система подвески одинакова для спортивного автомобиля и для роскошного автомобиля.Он был привлечен к разработке альтернатив традиционным подвескам с пружинами и амортизаторами после опыта владения Pontiac 1957 года с молодой пневмоподвеской и Citroën 1967 года с постоянно протекающей гидравлической подвеской.
Бозе полагал, что драйвер громкоговорителя, состоящий из магнита и электромагнитной катушки, которая толкает конус динамика внутрь и наружу, может быть серьезно увеличен, чтобы перемещать не только бумажный диффузор, но и автомобиль весом 1000 фунтов на каждом углу. Бозе создал математическую модель подвески.Для этого потребовались более совершенные и мощные электромагнитные двигатели, усилители мощности, алгоритмы управления и питание микропроцессоров — все, что он считал, со временем станет доступным.
Bose основал проект skunkworks в 1980 году и назвал его Project Sound, чтобы скрыть истинную сущность от бухгалтерии Bose. Двадцать четыре года спустя компания почувствовала себя достаточно комфортно с Project Sound, чтобы продемонстрировать его СМИ и аналитикам.
Подвеска Bose в Lexus LS400 1994 года выпуска.
Дневная разница в качестве езды
Линейный мотор на каждом углу заменил традиционные пружины, амортизаторы.
Во время презентации летом 2004 года компания Bose продемонстрировала модифицированные и немодифицированные Lexus LS400 1994 года и Porsche 911. На них с трудом проходили повороты и неровности, которые ударяли по передней, а затем задней осям, и еще один набор неровностей, которые поднимали левую. покрышка но не правая передняя, то задняя.
Неровности спереди и сзади были неудобными на короткой дороге на стандартном Lexus и, что удивительно, почти незаметны на подвеске Bose.Project Sound не просто демпфировал неровности проезжей части, но и активно им противодействовал.
Чередующиеся неровности влево-вправо на стандартной подвеске были настолько сильными в Porsche, что водителю-испытателю приходилось носить шлем, чтобы не сотрясать голову при неоднократных ударах в боковое окно.
Постоянный посетитель Bose знает, что у компании всегда есть моменты, когда вы хотите помочь своим посетителям. В данном случае это было испытание Lexus, движущегося на скорости по железнодорожному полотну. Водитель на скорости приблизился к железнодорожной эстакаде, вагон присел на корточки (ход подвески 8 дюймов), затем линейные двигатели перешли в режим полного расширения, и вагон оторвался от земли и проплыл по железнодорожной эстакаде с запасом дюймов. .После этого водитель вылез из машины, поклонился толпе, указал на машину, нажал кнопку, и передняя подвеска тоже опустилась, и поклонился, когда фары мигали.
В конце демонстрации представители Bose объяснили, что необходимо для вывода подвески на рынок серийного автомобиля к концу десятилетия: стоимость должна снизиться до разумного уровня для автомобиля высокого класса, и вес должен был снизиться не более чем на 50 фунтов на угол больше, чем у существующей подвески.Это означает, что серийный автомобиль будет весить дополнительно 200 фунтов.
Многие ведущие мировые автопроизводители встречались с Bose, но автомобили с подвеской Bose так и не вышли на рынок. Также были разговоры об адаптации подвески для машин скорой помощи или роскошных туристических автобусов.
Сиденье Bose Ride System для водителей-дальнобойщиков использует аналогичную электромагнитную подвеску.
Сиденья для грузовиков с подвеской Bose
Пытаясь вывести на рынок пневматическую подвеску, компания Bose пришла к идее установить электронику и механическое оборудование внутри сидений, используемых водителями грузовиков дальнего следования.Предыдущий уровень развития техники — это сиденья с пневматической подвеской, которые смягчали езду, но этого было недостаточно для многих дальнобойщиков с проблемами спины.
В сиденье Bose Ride прецизионные датчики обнаруживают движение вверх и вниз. Запатентованные алгоритмы Bose рассчитывают, как отрегулировать сиденье, а электромагнитный двигатель в основании противодействует ударам. Место стоит 3700 долларов, меньше по количеству. При опросе водителей грузовиков, которые сообщили о проблемах со спиной, которые повлияли на их способность управлять тягачами с жесткой подвеской, 97 процентов заявили, что сиденье Bose значительно снижает дискомфорт.
ClearMotion принимает на себя Bose Project
Приобретение ClearMotion подвески Bose и технологии сидений Bose Ride может помочь ClearMotion разработать то, что она называет цифровым шасси. Не вдаваясь в подробности, ClearMotion заявляет, что выйдет за рамки нынешних адаптивных подвесок, использующих воздушное демпфирование или магнитореологические адаптивные амортизаторы (с использованием магнитных частиц в жидкости амортизатора, обычно называемой технологией MagneRide).
С добавлением портфеля Bose ClearMotion заявляет, что это «шаг ближе к достижению своей миссии — быть ведущей компанией в области управления движением в сфере мобильности.
Шакил Авадхани, генеральный директор и соучредитель ClearMotion. заявил, что будет масштабировать свои собственные технологии и технологии Bose на беспилотные платформы, потребительские внедорожники и пикапы, коммерческие грузовики, автобусы, сельское хозяйство и внедорожники. Он сказал, что пассажиры беспилотных автомобилей будут стремиться к плавной поездке, чтобы в пути они могли работать на ноутбуке, планшете или традиционном бумажном блокноте.
Maglev: магнитно-левитирующие поезда | Справочник по электрическому и компьютерному проектированию
Поезда на магнитной подвеске используют магнетизм, чтобы парить над путями, по которым они движутся.Они быстрее, эффективнее и экологичнее современных колесных поездов. Возможно, что в один прекрасный день магнитолевые технологии станут обычным явлением во всем мире. В этой статье рассматривается история этих поездов, принципы их работы, а также их преимущества и недостатки. В нем также обсуждается важность электротехники в разработке маглев и то, как инженеры-электрики могут сделать эту технологию следующей транспортной революцией.
Представьте себе поезд без колес.Вместо того, чтобы катиться по рельсам, он спокойно парит над головой и плавно скользит от места отправления к месту назначения, даже не касаясь рельсов. Это может звучать как научная фантастика, но примеры этой технологии уже существуют во многих местах мира. Они известны как поезда maglev (происходит от термина mag netic lev itation). Эти футуристические локомотивы предлагают много новых захватывающих возможностей для путешествий. Они могут стать более быстрыми, безопасными и более энергоэффективными, чем традиционные транспортные системы.Хотя таких поездов пока немного, они являются центром исследований в сообществе электротехники. В результате маглев может стать обычным явлением раньше, чем вы думаете.
История Maglev
Фундаментальные идеи, лежащие в основе технологии магнитной подвески, восходят к началу 20 века. Большая работа была направлена на создание основы для этих поездов, включая разработку электродвигателей и исследования в области магнетизма. Несколько ученых, а именно Роберт Годдард и Эмиль Бачелет, даже осмелились предложить транспортное средство, которое будет плавать с помощью магнитов (Yadav, 2013).В 1934 году немец по имени Герман Кемпер получил патент на первую концепцию магнитного левитирующего поезда (Yadav, 2013). Идея начала проявляться только в 1960-х годах. В это время Германия и Япония начали исследовать потенциал маглев. В течение 70-х и 80-х годов обе страны добились больших успехов в разработке этих поездов. Германия построила и протестировала серию прототипов систем на магнитной подвеске и назвала их конструкцию TransRapid (рис. 1). Поезда достигли скорости более 250 миль / ч (402 км / ч) на испытательном треке (Luu, 2005).Япония также испытала две серии собственных разработок, названных ML-500, а позже MLU. Их поезда могли развивать скорость более 300 миль в час (483 км / ч) (Луу, 2005).
Рисунок 1
Transrapid в испытательном центре в Германии недалеко от Бремена. Источник: © Stahlkocher / CC BY-SA 3.0
Япония продолжала развивать свою технологию магнитолевой подвески до 90-х годов и позже. Они протестировали новую серию под названием MLX, которая разогналась до 350 миль в час (563 км / ч) в 2003 году (Yadav, 2013). В стране не создано коммерческих линий, но исследования все еще проводятся.В Германии коммерческая линия TransRapid, соединяющая Берлин и Гамбург, была предложена в 1992 году. Однако в 2000 году правительство закрыло проект (Luu, 2005). Однако не все было потеряно, поскольку китайцы обратили на это внимание и поручили немцам построить поезд TransRapid в Шанхае. Шанхайский маглев (рис. 2), созданный в результате этого предприятия, в настоящее время является единственным высокоскоростным поездом на магнитной подвеске, который используется в коммерческих целях. Он перевозит пассажиров на расстояние 19 миль (30 км) за 8 минут, достигая максимальной скорости более 250 миль в час (431 км / ч) (Coates, 2004).Таким образом, Китай быстро стал крупным игроком на мировом рынке маглев. Страна планирует продолжить развитие своей инфраструктуры на магнитной подвеске.
Рисунок 2
Шанхайский маглев на выходе из международного аэропорта Пудун с железнодорожной картой Shanghai Transit Map, показывающей маршрут до Longyang Road. Источники коллажей: © Alex Needham / Public Domain and Metropedia
Как это работает?
Поезда на маглеве не имеют колес и рельсов. Как показано на рисунке 3, у них есть направляющие, и они плавают по ним, даже не касаясь их.
Рисунок 3
Сравнение колесных рельсов и направляющих. Источник: Автор, взято из работы Ли (2006).
Есть три основных части для достижения функциональности магнитной подвески: левитация, движение и наведение (как показано ниже).
Рисунок 4
Левитация, движение и наведение на маглеве. Источник: Автор, взято из работы Ли (2006).
Левитация
Левитация — это способность поезда оставаться подвешенным над рельсами. Есть два важных типа техники левитации:
- Электромагнитная подвеска (EMS): EMS (рис. 5) использует силу притяжения электромагнитов, размещенных на направляющих и на поезде, для достижения левитации.Преимущества этого метода заключаются в том, что его проще реализовать, чем электродинамическая подвеска (обсуждается ниже), и что он поддерживает левитацию при нулевой скорости. Недостатки в том, что система нестабильна по своей природе. На высоких скоростях становится трудно поддерживать правильное расстояние между поездом и рельсом. Если это расстояние не может быть сохранено, поезд не сможет левитировать и остановится. Чтобы учесть это, EMS требует сложных систем управления с обратной связью, чтобы поезд всегда был стабильным (Lee, 2006).
Рисунок 5
Электромагнитная подвеска (EMS). Использует притягивающие магнитные силы. Источник: Автор, взято из работы Ли (2006).
- Электродинамическая подвеска (EDS): EDS (Рисунок 6) использует силу отталкивания (сверхпроводящих) магнитов, размещенных на направляющих и на поезде, для достижения левитации. Магниты движутся мимо друг друга во время движения поезда и создают силу отталкивания. Преимущества этого метода в том, что он невероятно стабилен на высоких скоростях.Поддержание правильного расстояния между поездом и рельсовым полотном не является проблемой (Lee, 2006). Недостатки состоят в том, что необходимо набрать достаточную скорость, чтобы поезд вообще мог левитировать. Кроме того, эта система намного сложнее и дороже в реализации.
Рисунок 6
Электродинамическая подвеска (EDS). Использует отталкивающие магнитные силы. Источник: Автор, взято из работы Ли (2006).
Силовая установка
Тяга — это сила, которая движет поезд вперед.Maglev использует электрический линейный двигатель для достижения тяги. Обычный электрический роторный двигатель использует магнетизм для создания крутящего момента и вращения оси. Он имеет неподвижный элемент, статор, который окружает вращающийся элемент, ротор. Статор используется для создания вращающегося магнитного поля. Это поле создает на роторе вращающую силу, которая заставляет его вращаться. Линейный двигатель — это просто развернутая версия этого (см. Рисунок 7). Статор уложен ровно, а ротор лежит над ним. Вместо вращающегося магнитного поля статор создает поле, которое распространяется по всей его длине.Точно так же вместо вращающей силы на ротор действует линейная сила, которая тянет его вниз по статору. Таким образом, линейный электродвигатель производит движение по прямой линии. Однако этот двигатель может создавать силу только тогда, когда ротор находится над статором. Когда ротор доходит до конца, он перестает двигаться.
Рисунок 7
Роторный двигатель против линейного двигателя. Источник: Автор, взято из работы Ли (2006).
При описании линейного двигателя стандартом является использование термина «первичный» вместо «статор» и «вторичный» вместо «ротор».В поездах на магнитной подвеске вторичная обмотка прикреплена к днищу вагонов, а первичная — к направляющей. Таким образом, по направляющей посылается магнитное поле, и поезд тянет за собой. В некотором смысле, вся длина пути на магнитной подвеске может считаться частью двигателя поезда. Система, которая была описана до сих пор, представляет собой линейный асинхронный двигатель (LIM). Это так называется, потому что магнитное поле в первичной обмотке индуцирует магнитное поле во вторичной обмотке. Это взаимодействие между исходным полем и индуцированным полем, которое заставляет вторичное поле тянуться.Однако в этой конфигурации вторичный всегда немного отстает от движущегося поля в первичном. Это отставание является источником энергии и потери скорости. В линейном синхронном двигателе (LSM) отставание устраняется путем присоединения постоянных магнитов к вторичной обмотке. Поскольку вторичная обмотка теперь создает собственное постоянное магнитное поле, она движется вниз по первичной обмотке синхронно с движущимся полем — отсюда и название этого варианта двигателя (Gieras, 2011). Поскольку LSM быстрее и эффективнее, они являются предпочтительным двигателем в высокоскоростных поездах на магнитной подвеске (Lee, 2006).
Руководство
Система навигации — это то, что удерживает поезд по центру пути. В высокоскоростном магнитоле для этого используются магнитные силы отталкивания (рис. 8). В TransRapid есть две электромагнитные рельсы, расположенные на поезде, обращенные к обеим сторонам пути. Эти рельсы удерживают поезд от слишком большого отклонения от курса (Lee, 2006). В MLX наведение сочетается с системой левитации. Рельсы левитации по обе стороны от поезда соединены друг с другом.Благодаря этому соединению, когда поезд приближается к одной стороне, индуцируется восстанавливающая сила, которая толкает его назад к центру. Таким образом, MLX одновременно левитирует и управляется (Lee, 2006).
Рисунок 8
Система наведения Transrapid и MLX. Оба используют отталкивающие магниты. Источник: Автор, взято из работы Ли (2006).
Преимущества Maglev
Самая очевидная привлекательность поездов на магнитной подвеске заключается в том, что они могут двигаться быстрее, чем традиционные поезда.Единственный коммерческий высокоскоростной магнитопровод, Shanghai Maglev, в настоящее время является самым быстрым из существующих поездов. Он движется со скоростью более 50 миль / ч (80 км / ч) быстрее, чем самый быстрый высокоскоростной колесный рельс ( 320 км / ч Hayabusa , 2013). И это только первое. Отсутствие трения между поездом и направляющей снимает многие ограничения, которые связывают традиционные поезда. Маглев будет только быстрее (Луу, 2005). Есть и другие, более тонкие качества, которые также делают маглев привлекательным:
- Долговечность: Обычные колеса и рельсы со временем подвергаются сильным нагрузкам.Чтобы они оставались работоспособными, их необходимо периодически заменять и ремонтировать. В маглеве отсутствует контакт между поездом и рельсовым полотном, поэтому износ значительно меньше. Из-за этого срок службы частей магнитолевой системы значительно больше (Powell, 2003). С экономической точки зрения это хороший стимул, поскольку ремонт и обслуживание — это дорогостоящие и трудоемкие мероприятия.
- Безопасность: Может показаться нелогичным, что эти поезда более безопасны, поскольку они движутся намного быстрее, чем их колесные аналоги.Тем не менее, это правда. Поезда на маглеве практически невозможно сходить с рельсов (Луу, 2005). Чтобы оторвать поезд от рельсов, нужно что-то вроде полного обрушения направляющих. К тому же погода — не проблема. Поскольку движение поездов не зависит от трения, снег, лед и дождь практически не оказывают никакого влияния (Луу, 2005). Наконец, можно легко поднять направляющие. Если поезда движутся по рельсам на высоте десяти футов над землей, вероятность столкновения с объектом на его пути меньше (Луу, 2005).
- Энергоэффективность: Еще одно преимущество левитации заключается в том, что эти поезда не теряют энергию на трение. Это дает им преимущество в эффективности (Wang 2010). Потребление энергии необходимо для успеха транспортной системы. Большая часть эксплуатационных расходов идет на оплату электроэнергии. Поэтому это преимущество в эффективности очень важно. Однако, хотя поезда на магнитной подвеске более эффективны, в настоящее время они не намного эффективнее современных высокоскоростных поездов.Тем не менее, у них есть потенциал стать намного лучше в этой категории.
- Воздействие на окружающую среду: Поезда на магнитной подвеске могут делать крутые повороты, чем высокоскоростные рельсы. Это позволяет строить направляющие, которые могут намного лучше перемещаться по местности (Wang 2010). Пути можно спроектировать так, чтобы они оказывали минимальное влияние на окружающую среду. Направляющие также занимают меньше площади, чем рельсы (Wang 2010). Это еще больше снижает воздействие на окружающую среду. И, как отмечалось ранее, направляющие легко поднимаются над землей (Луу, 2005).И растения, и животные в большей безопасности, если поезд движется над ними, а не проезжает мимо них.
- Шумовое загрязнение: При рассмотрении транспортного проекта шум (в разумных пределах) не так важен, как экономия или безопасность. Однако снижение шума все же считается положительным моментом. Поезда на маглеве тише современных поездов, так что это еще один аргумент в их пользу (Wang, 2010).
Недостатки Maglev
Несмотря на то, что есть много плюсов, все же есть причины, по которым поезда на магнитной подвеске строятся не везде.Возможно, самая главная причина в том, что направляющие на магнитной подвеске несовместимы с существующей железнодорожной инфраструктурой. Любая организация, пытающаяся внедрить систему магнитной подвески, должна начать с нуля и построить совершенно новый набор путей. Это требует очень больших начальных вложений (Coates, 2004). Даже несмотря на то, что рельсы со временем стоят меньше, чем рельсы (Powell, 2003), трудно оправдать такие большие предварительные затраты. Другая проблема заключается в том, что поезда на магнитной подвеске движутся быстро, но они могут двигаться недостаточно быстро.Страны, в которых уже установлены высокоскоростные рельсы, не хотят тратить миллиарды долларов на внедрение системы, которая лишь незначительно лучше существующего решения. Просто на данный момент рынок этих поездов невелик. Трудно спорить, что эти поезда превосходят стандартные. Тем не менее, необходимо проделать дополнительную работу, прежде чем их станет целесообразно внедрять во всем мире.
Электротехника на Маглеве
Со времен парового двигателя поезда традиционно принадлежали инженерам-механикам.Все они были двигателями и осями, колесами и двигателями. Однако внедрение технологии магнитолевой подвески нарушило эту традицию. Разработка этих поездов потребовала участия ряда других областей, помимо машиностроения, включая физику и химию. Но самое главное, это привлекло инженеров-электриков за стол переговоров. С самого начала инженеры-электрики вносили основной вклад в разработку технологии магнитолевой подвески. Эрик Лэйтуэйт, инженер-электрик, разработал первый линейный асинхронный двигатель, важный и необходимый предшественник поездов на магнитной подвеске.Герман Кемпер, которого многие считают отцом маглева, также был инженером-электриком. Немецкие и японские инженеры-электрики работали над созданием программ магнитолевой подвески в своих странах. И сегодня инженеры-электрики делают эту технологию все лучше и лучше, чтобы она могла понравиться странам всего мира. У поездов на маглеве на удивление мало движущихся частей. Все они про электрические токи, магниты и проволочные петли. Некоторые важные темы в этой области — электромагнитные поля и волны, теория цепей, системы управления с обратной связью и энергетика.Все это входит в компетенцию инженеров-электриков. Поэтому для решения самых серьезных проблем, с которыми сталкивается эта технология, нужны инженеры-электрики. Поезда нужно делать быстрее и энергоэффективнее. Все это время их нужно держать в пределах безопасности. Направляющие необходимо сделать дешевле, проще в реализации и, возможно, лучше совместить с существующими рельсами. Системы управления должны быть безупречными. Все эти и многие другие проблемы требуют, чтобы инженер-электрик смог найти ответы на свои вопросы.
Маглев будущего
ТехнологииMaglev открывают большие перспективы на будущее. У него есть потенциал стать более дешевым, быстрым, безопасным и экологичным видом транспорта, чем сегодня. И с помощью некоторых инженеров-электриков он станет всем этим. Эта технология может применяться везде, от междугороднего общественного транспорта до поездок по стране. Есть даже предложения построить длинные подземные трубы, отсосать из них воздух и разместить внутри них поезда на магнитной подвеске.В этой обстановке практически не будет сопротивления ветра, поэтому поезд может легко достичь скорости, превышающей скорость звука (Thornton, 2007). Хотя может пройти много времени, прежде чем эта технология станет широко распространенной, трудно отрицать, что в какой-то момент она станет преобладающей. Преимущества слишком сложно игнорировать. На данный момент используется только один коммерческий поезд на магнитной подвеске, и он уже затмил все, что было до него. Как эта технология будет развиваться и улучшаться по мере нашего продвижения в будущее? Время покажет.Но весьма вероятно, что сейчас мы стоим на пороге транспортной революции. Я, например, с нетерпением жду возможности скользить по сельской местности на скорости 300 миль в час в парящей коробке магнитов.
- Хаябуса со скоростью 320 км / ч побил мировой рекорд скорости. (2013, 17 марта). Джапан Таймс . Получено с http://www.japantimes.co.jp/news/2013/03/17/national/320-kph-hayabusa-matches-world-speed-record .
- Коутс, К., Антлауф, В., и Бернардо, Ф. (2004). Fast Track .Североамериканский институт транспорта на маглеве. Получено с http://namti.org/published-articles/articles/civil-engineering/fast-track/ .
- Gieras, J., Piech, Z., & Tomczuk, B. (2011). Линейное синхронное движение (2-е издание). Бока-Ратон, Флорида: CRC Press. Постоянная ссылка OCLC WorldCat: http://www.worldcat.org/oclc/526111254
- Ли, В., Ким, К., и Ли, Дж. (2006). Обзор технологий поездов на маглеве. IEEE Transactions on Magnetics, 42 (7), 1917-1925.DOI: 10.1109 / TMAG.2006.875842
- Луу, Т., и Нгуен, Д. (2005). Маглев: Поезд будущего . Школа инженерии Университета Питтсбурга Суонсон. Получено с http://www.teslasociety.com/ttrain.doc
- Пауэлл, Дж. И Дэнби, Г. (2003). Новый вид транспорта в 21 веке. 21St Century Science & Technology Magazine (лето 2003 г.), 43-57. Получено с http://www.21stcenturysciencetech.com/articles/Summer03/maglev2.html .
- Торнтон, Р.(2007). Будущее Маглева . Доклад представлен на Международной конференции по электрическим машинам и системам, Сеул, Южная Корея. Пискатауэй, Нью-Джерси: IEEE. Получено с http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=4412045
- Ван, К., и Цзун, Г. (2010). Сравнительное исследование устойчивого развития маглев и высокоскоростных колесных рельсов . Документ, представленный на ICCTP 2010: Интегрированные транспортные системы, Пекин, Китай. DOI: 10.1061 / 41127 (382) 20
- Ядав, М., Мехта, Н., Гупта, А., Чаудхари, А., и Махиндру, Д. В. (2013). Обзор магнитной левитации (МАГЛЕВ): технология для приведения в движение транспортных средств с помощью магнитов. Global Journal of Research in Engineering: Mechanical & Mechanics Engineering, 13 (7), 29-42. Получено с http://engineeringresearch.org/index.php/GJRE/article/view/858
ЭЛЕКТРОМАГНИТНАЯ СИСТЕМА ПОДВЕСКИ Исследовательский документ
ИНЖЕНЕРНЫЙ КОЛЛЕДЖ MAM
СИРУГАНУР, ТРИЧИ
ТАМИЛ НАДУ.
ОТДЕЛЕНИЕ МАШИНОСТРОЕНИЯ
ШЕЙКЕЛЬ А.К. МОХАМЕД (II МЕЧ)
Электронная почта: [email protected] A.AJMAL KHAN (II MECH)
N.MADESH (II MECH)
АННОТАЦИЯ:
Подвеска автомобиля — это система, которая отделяет колесо / ось в сборе от кузова. Основная функция системы подвески — изолировать конструкцию автомобиля от ударов и вибрации, возникающих из-за неровностей дорожного покрытия.Сегодня некоторые технологии используются в подвеске автомобилей. Но они не могут обеспечить пассажирам полный комфорт и управляемость. Эти два термина очень важны для дальних путешествий в автомобиле. Ниже приведены основные требования к системе подвески
1. Предотвращать передачу дорожных ударов на раму автомобиля. 2. Для сохранения устойчивости транспортного средства при крене или крене во время движения. 3. Для защиты пассажиров от дорожных ударов.
4. Поддерживать правильную геометрию рулевого управления.
5. Обеспечивать хорошее сцепление с дорогой при движении, поворотах и торможении.
В этой статье описывается недавно разработанная система подвески электромагнитной системы подвески. Основная особенность этой системы подвески — исключение крена и тангажа во время движения автомобиля. Сердцем этой системы подвески является линейный электромагнитный двигатель, установленный на каждом колесе транспортного средства. Типы подвесной системы;
1. Пружинная подвеска.
2. Демпферная система подвески.
3. Система пневматической подвески.
4. Гидроэластичная система подвески.
5. Система гидрогазовой подвески.
Моделирование системы подвески
Существующие модели включают модели с полным, половинным и четвертным корпусом.
Пример: упрощенная модель четверти тела.
Уравнение движения
Уравнение перемещения подвески
Поперечная функция
ОСНОВНЫЕ СООБРАЖЕНИЯ, КАСАЮЩИЕСЯ СИСТЕМЫ ПОДВЕСКИ:
1.Вертикальная загрузка
Когда дорога колесо приходит через выпуклость или яму на дороге, он подвергается воздействию вертикальных сил, растяжения или сжатия, в зависимости от характера дорожного нерегулярности. Они поглощаются упругим сжатием, сдвигом, изгибом или скручиванием пружины. Режим сопротивления пружины зависит от типа и материала используемой пружины.
Далее, когда переднее колесо ударяется о неровность, оно начинает вибрировать. Эти колебания экспоненциально затухают из-за демпфирования, присутствующего в системе.Однако заднее колесо через определенное время достигает того же уровня в зависимости от колесной базы и скорости транспортного средства. Конечно, когда заднее колесо достигает неровности, оно испытывает такие же вибрации, какие когда-то испытывало переднее колесо. Видно, что для уменьшения тенденции к продвижению транспортного средства частота передней рессорной системы должна быть меньше, чем частота задней рессорной системы.
2. Каток:
Центр тяжести транспортных средств находится значительно над землей.По этой причине при повороте центробежная сила действует на C.G. транспортного средства, в то время как сопротивление дороги действует внутрь, на колеса. Это приводит к тому, что пара поворачивает автомобиль вокруг продольной оси. Это называется прокаткой. Склонность к перекатыванию проверяется с помощью стабилизатора.
3. Тормозное падение:
При торможении шум транспортного средства имеет тенденцию уменьшаться или уменьшаться. Это зависит от положения центра тяжести относительно земли, колесной базы и других характеристик подвески.Точно так же крутящие нагрузки во время ускорения стремятся поднять переднюю часть автомобиля.
4. Боковое усилие:
Центробежная сила при поворотах, боковом ветре, изгибе дороги и т. Д. Вызывает боковую тягу к автомобилю. 5. Подрессоренная …
Присоединяйтесь к StudyMode, чтобы прочитать полный документ
Это был Factolex
Это был FactolexFactolex был создан в 2007 году Александром Кирком и Надером Черни как сайт, посвященный фактам, которые могут быть организованы в индивидуальную лексику.
Факты были автоматически собраны и обработаны из нескольких надежных источников, таких как Википедия. и предлагали пользователям выбрать факты, которые, по их мнению, были наиболее важными для термина. Это обеспечивало ранжирование фактов среди пользователей, а также создание словаря индивидуальных определений терминов пользователями.
Ниже вы можете увидеть несколько скриншотов сайта, когда он работал. Сайт существовал как на английском, так и на немецком языках.
Краткое содержание
Что такое Factolex?
- словарь, который объясняет терминов с использованием фактов , представленных нашими пользователями
- компактный и удобочитаемые пояснения терминов вместо длинных текстов
- мы можем найти лучшие термины и факты на основе выбор наших пользователей фактов
Что это для вас?
- Вы получаете удобный список терминов, определяется только фактами, которые вы выбрали (так называемый мой лексикон)
- Вы можете просматривать чужие коллекции (мы называем их lexica)
- Если вы хотите, чтобы узнал больше о факте, щелкните источник факта, щелкнув значок рядом с ним
- Вы можете ввести термины и факты, которые имеют отношение к вам — термины (очевидно), менее значимые для общественности, просто имеют более низкий рейтинг, но не удаляются, как в Википедии
Что такое Factolex?
Factolex — это словарь фактов, созданный сообществом, который позволяет вам создать свой собственный словарь.
Установив флажки, вы можете выбрать факты, которые лучше всего описывают этот термин. Это создаст ваше индивидуальное объяснение термина и построит ваш собственный словарный запас. Также легко и быстро добавить свои собственные термины и факты.
По мере того, как каждый вносит свой вклад со своими терминами, фактами и отбором, словарный запас становится лучше. Чем больше людей считает факт важным, чем выше он стоит в списке, тем быстрее вы понимаете, о чем идет речь.
Зачем использовать Factolex, когда есть Википедия?
В Factolex мы стремимся объяснять термины на другом уровне, чем Википедия.Вы переходите в Factolex, чтобы получить основные факты о термине, а затем переходите к источнику факта (это может быть Википедия), который вам особенно интересен.
В качестве другого аспекта Factolex пытается принять демократичный характер совместной работы пользователей, каждый может внести свой вклад. Вам не нужны глубокие знания синтаксиса или правил, применимых к лексике, чтобы помочь.
Кроме того, мы считаем, что в Factolex следует включить больше терминов. Нередко в Википедии термины удаляются вскоре после добавления пользователями, поскольку влиятельные пользователи Википедии считают, что они неуместны.Не так с Factolex: если термин имеет только нишевое значение, он будет отображаться ниже в списке, чем более важные термины с тем же именем.
Чем отличается Factolex?
Factolex делит знания на короткие тексты: факты. Хотя это может ограничить глубину содержащихся знаний, это также упрощает обработку знаний.
Установив флажки рядом с фактом, пользователи могут создать свой собственный лексикон, «мир согласно User X ».
Затем Factolex использует эти небольшие пользовательские вклады для ранжирования фактов для термина. Если все работает хорошо, главный факт уже довольно хорошо определяет термин, давая вам мгновенный ответ на то, о чем он.
Чего вы пытаетесь достичь с помощью Factolex?
С Factolex мы хотим привести знания в форму, в которой с ними будет легче работать.
Энциклопедии содержат много знаний, но все они «запечатлены» в длинных текстах.Это очень затрудняет использование этих знаний в ситуациях, когда существуют определенные ограничения, такие как ограниченное время и пространство.
Предоставляя структурные рекомендации, мы упрощаем внесение вклада (вы уже можете помочь, установив флажок), в то время как вы также можете извлечь выгоду из своего собственного вклада (щелкнув флажки, вы создадите свой личный лексикон).
PPT — ЭЛЕКТРОМАГНИТНАЯ ПОДВЕСКА ДЛЯ АВТОМОБИЛЯ PowerPoint Presentation, скачать бесплатно
ЭЛЕКТРОМАГНИТНАЯ ПОДВЕСКА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА
Подвеска не может быть установлена, а другая форма подвески установлена непосредственно на рессоре автомобиля оборудование, обеспечивающее комфортную поездку для пассажиров, а также товары и рабочие части транспортного средства
ОСНОВНЫЕ ТРЕБОВАНИЯ • Комфорт для пассажиров • Управление автомобилем
Комфорт и управление • Комфорт обеспечивается изоляцией пассажиров транспортного средства от дороги такие нарушения, как неровности или выбоины.• Контроль достигается за счет предотвращения чрезмерного качения и качения кузова автомобиля, а также поддержания хорошего контакта между шиной и дорогой.
ВИДЫ БЕЗОПАСНОСТИ • Гидравлические демпферы • Газовые демпферы • Электромагнитные демпферы
Электромагнитный демпфер
Основные компоненты • электромагнитный привод • усилитель мощности на каждом колесе, • набор алгоритмов управления .
Электромагнитный привод • Электромагнитный привод установлен на каждом колесе.Внутри электромагнитного привода находятся магниты и катушки с проволокой. Когда на катушки подается электроэнергия, двигатель втягивается и выдвигается, создавая движение между колесом и кузовом автомобиля.
Электромагнитный привод
Рабочий…
Управление двигателем
Усилитель мощности Усилитель мощности подает электроэнергию на двигатель в ответ на сигналы алгоритмов управления .
Алгоритмы управления • Система подвески управляется набором математических алгоритмов. • Эти алгоритмы управления работают, наблюдая измерения датчиков, снятых вокруг автомобиля, и отправляя команды на усилители мощности, установленные в каждом углу автомобиля. • Цель алгоритмов управления — позволить автомобилю плавно скользить по дорогам и исключить крен и тангаж во время движения.
Блок-схема
Характеристики автомобиля • Устранение крена кузова при резком торможении и ускорении.• уменьшение общего движения тела и резких вибраций приводит к повышению комфорта и управляемости.
Отбойник
camparison
При прокатке
Новые компактные модели
0 TH3 TH3 Почувствуйте разницу
Почувствуйте разницу
Исследование эквивалентной неподрессоренной массы и нелинейных характеристик активной подвески с электромагнитным приводом
Активная подвеска с электромагнитным приводом обеспечивает одновременно активный контроль и сбор энергии за счет вибрации.Однако активная подвеска с электромагнитным приводом вращающегося типа создает значительную дополнительную массу неподрессоренной массы из-за инерции вращающихся компонентов привода. Величина вводимой неподрессоренной массы изучается на примере привода с редуктором и привода с шарико-винтовой передачей. Геометрия подвески и привода также значительно влияет на эквивалентную неподрессоренную массу. При моделировании характеристик подвески или логике управления следует учитывать эту эквивалентную неподрессоренную массу.Кроме того, необходимо компенсировать дополнительную силу из-за нелинейных особенностей конструкции подвески, и это исследуется. Активная сила привода должна компенсировать эту дополнительную силу. Открытие, содержащееся в этой статье, обеспечивает фундамент для оценки характеристик активной подвески с электромагнитным приводом роторного типа и стратегии управления, а также для более точного управления активной подвеской с электромагнитным приводом.
1. Введение
Подвеска является важным компонентом для изоляции вибраций, возникающих на неровной дороге, и обеспечения безопасности вождения автомобиля.Пассивная подвеска широко используется благодаря своей достаточной производительности и относительно невысокой стоимости. Однако из-за фиксированных параметров жесткости пружины и коэффициента амортизации пассивная подвеска может достичь только приемлемого компромисса между комфортом езды и устойчивостью к дороге. Активная подвеска является подходящей альтернативой благодаря регулируемой силе управления в зависимости от различных условий. Однако с точки зрения экономии топлива и экологичности большое количество энергии, потребляемой обычной активной подвеской, недопустимо.Автомобиль, работающий на экологически чистых источниках энергии (например, электромобиль, гибридный автомобиль и автомобиль на топливных элементах), как правило, оснащен высоковольтной батареей и, таким образом, обеспечивает систему хранения энергии. Есть шанс разработать активную подвеску с электромагнитным приводом, которая может управлять подвеской и одновременно получать энергию от вибрации.
Возникло много исследовательских интересов в области электромагнитной активной подвески. Электромагнитный привод основан на линейных электромагнитных двигателях или вращающихся электромагнитных двигателях.Bose Company, Gysen et al. И Suda et al. исследовал и разработал линейные электромагнитные двигатели для улучшения динамики транспортного средства при меньшем потреблении энергии [1–5]. Основываясь на роторном электромагнитном двигателе, Zheng et al. предложил электромагнитный привод, который включает в себя бесщеточный двигатель постоянного тока и шариковую винт [6]. Инь и др. использовать обычный синхронный двигатель с постоянными магнитами (PMSM) и разработать соответствующий механизм для реализации активной подвески с электромагнитным приводом [7]. Цзо и Чжан исследовали как линейный, так и поворотный подходы к конструкции электромагнитного привода [8, 9].Линейный тип обычно увеличивает подрессоренную и неподрессоренную массу в незначительной степени. Однако инерция вращающихся компонентов роторного типа будет действовать как значительная дополнительная масса, особенно на неподрессоренную массу. Кроме того, чтобы поддерживать постоянную относительную скорость между подрессоренной массой и неподрессоренной массой, необходимо приложить дополнительную силу из-за нелинейных характеристик данной конструкции подвески. Эти проблемы могут повлиять на динамическую модель подвески; таким образом, полученная логика управления может привести к неправильной ситуации.
Чтобы вычислить введенную неподрессоренную массу, вызванную инерцией вращающихся компонентов, в этой статье используются, например, тип редуктора и активная подвеска с электромагнитным приводом, приводимая в действие электромагнитным приводом, и предлагается так называемая эквивалентная неподрессоренная масса и анализируется величина . На основе конструкции подвески, предложенной Ченом и Чжао, анализируется дополнительная сила, вызванная нелинейными особенностями конструкции подвески.
Чтобы показать важность точной неподрессоренной массы, в Разделе 2 представлена модель четверти кабины обычной активной подвески и ее динамические уравнения.Эквивалентные неподрессоренные массы приводов с редуктором и шариковинтовой передачей анализируются и обсуждаются в Разделе 3. В Разделе 4 будет обсуждаться дополнительная сила, вызванная нелинейными характеристиками данной конструкции подвески, а в Разделе 5 сделаны выводы.
2 Модель четверти автомобиля
Модель четвертьфинала обычно используется для простого анализа комфорта езды и устойчивости подвески к дороге. Соответственно могут быть получены модель полуавтомобиля и полная модель автомобиля. На Рисунке 1 показана широко используемая модель активной подвески четверть автомобиля, которая моделируется как система с двумя степенями свободы, которая включает в себя подрессоренную массу, неподрессоренную массу, жесткость пружины, жесткость шины и силу привод.
Смещение подрессоренной массы, неподрессоренной массы и воздействия дороги обозначается как, и. Уравнения динамики модели четверти автомобиля могут быть выражены как
. Обычно параметр неподрессоренной массы является константой, которая включает только обычные компоненты, такие как шина, обод, кулак, тормозной диск и суппорты. Однако на самом деле инерция вращающихся компонентов привода вносит вклад в неподрессоренную массу. Учитывая силу, действующую на неподрессоренную массу, не только неподрессоренная масса отреагирует с ускорением, но и вращающиеся компоненты будут реагировать с угловым ускорением.Следовательно, фактическая неподрессоренная масса больше не будет постоянной. На основе исследования эквивалентная неподрессоренная масса определяется как дополнительная неподрессоренная масса, создаваемая приводом. Примеры эквивалентной неподрессоренной массы приведены в разделе 3. Более того, активная сила, полученная из обычной модели четверти вагона, и логики управления должны компенсировать дополнительную силу, которая вызвана нелинейными характеристиками данной конструкции подвески. Следовательно, приведенные выше динамические уравнения модели четверти вагона уже не будут точными в реальных приложениях.
3. Эквивалентная неподрессоренная масса исполнительного механизма
Как обсуждалось выше, масса или инерция вращающихся компонентов исполнительного механизма может внести дополнительную неподрессоренную массу. Таким образом, имитация характеристик подвески и активной силы, полученных на обычной модели четвертьфинала, не подходит. Чтобы показать величину введенной неподрессоренной массы, расчеты выполняются для типа коробки передач и активной подвески с электромагнитным приводом с шарико-винтовой передачей. Для упрощения исследования пружиной пренебрегают и сначала принимают фиксированное смещение подрессоренной массы; затем обсуждается комбинированный динамический эффект подрессоренной массы и неподрессоренной массы.
3.1. Коробка передач Тип
На основе подвески на двойных поперечных рычагах, Yin et al. предложила активную и регенерирующую энергию подвеску, которая показана на фиг. 2, а ее привод — на фиг. 3. Привод закреплен на подрессоренной массе. Обзор конструкции и конструкция привода подробно описаны в [7].
Относительное смещение подрессоренной массы и неподрессоренной массы предполагается равным -80 мм ~ + 80 мм для обычных применений. Если принять фиксированную подрессоренную массу смещения, когда неподрессоренная масса толкает вверх и вниз, скорость неподрессоренной массы представляет собой относительную скорость между подрессоренной массой и неподрессоренной массой.Очевидно, что этой скорости неподрессоренной массы соответствует определенная скорость вращения кривошипа. Взаимосвязь скорости вращения коленчатого рычага и скорости неподрессоренной массы может быть описана следующим образом: где обозначает относительное положение между подрессоренной массой и неподрессоренной массой, — это скорость вращения коленчатого рычага, — это передаточное отношение скорости вращения коленчатого рычага и неподрессоренной части. массовая скорость, которая определяется данной конструкцией и является массовой скоростью неподрессоренной части.
Поскольку угловое ускорение кривошипа и ускорение неподрессоренной массы являются производными от угловой скорости вращения кривошипа и скорости неподрессоренной массы, соответственно, может быть получено аналогичное соотношение:
.