Интегрированная система активного управления vsm
Одна из основных проблем, стоящих перед автопроизводителями – повышение безопасности автомобиля, в том числе и в процессе движения. Для этого машины оснащаются различными устройствами, помогающими водителю справиться с управлением в самых сложных ситуациях. Одной из них является интегрированная система активного управления VSM.
О силах и моментах
Крутящий момент, развиваемый мотором, поступает на колеса, и автомобиль начинает двигаться. Так очень упрощенно можно описать процесс его перемещения. Однако при начале движения, маневрировании и торможении, на автомобиль воздействуют самые разнообразные силы, причем характер их воздействия зависит от скорости, состояния дороги и действий водителя.
Порой эти действия ошибочны и неправильны, следствием чего может оказаться ДТП. Чтобы избежать такого, разработчиками придумано не одно электронное устройство, оказывающее помощь водителю в сложных условиях. Не касаясь их всех, достаточно упомянуть о самых известных и находящихся у всех на слуху:
Работа любого из подобных устройств активного управления, основана на постоянном контроле сигналов от датчиков. По ним контроллером определяется несоответствие реального режима движения автомобиля тому, что должно быть, им же принимаются необходимые меры, например он сбрасывает скорость, притормаживает или разблокирует колесо, меняет режим работы двигателя.
Система активного управления VSM
Стоит упомянуть ещё одну, несколько специализированную, но полезную интегрированную систему управления VSM. Сама по себе она не работает, только в комплекте с ESP и ABS. Если ABS обеспечивает устойчивость при торможении, TCP при разгоне, ESP препятствует боковым смещениям и занимается стабилизацией положения автомобиля при манёврах, то система VSM как бы интегрированная, объединяющая работу всех остальных узлов и действия водителя.
Система VSM объединяет электродвигатель рулевого управления, ESP и ABS. Как заявляют производители авто с VSM, система управления стабилизацией противодействует ошибочным действиям водителя, т.е. если им в критической ситуации выполняются неправильные действия для управления автомобилем, то VSM будет им противодействовать.
В более понятном изложении это значит, что если водитель при выполнении маневра крутит руль не в ту сторону, то это потребует от него значительных усилий. Тогда как при правильном движении руля ничего подобного не происходит.
Задачи, которые решает VSM
Если попытаться обобщить, какие задачи решает подобная интегрированная система, то можно отметить следующее:
- облегчение усилия на руле при парковке и маневрировании на малой скорости;
- увеличение на большой скорости крутящего момента рулевого колеса;
- увеличение реактивного усилия колес при их возврате в среднее положение;
- корректировка положения передних колес при движении по дороге с уклоном, боковом ветре, различии давления в колесах;
- повышение устойчивости (курсовой).
Таким образом, стабилизацией положения автомобиля на дороге в процессе движения, система VSM занимается точно так же, как ESP, ABS и другие аналогичные по назначению устройства. Разница между ними будет заключаться в том, что VSM через электромеханический усилитель оказывает воздействие на рулевое колесо, а не на тормоза. Иными словами, объединяется воздействие на руль и тормоза.

Особенно это актуально, когда происходит разгон или торможение на разной поверхности (одно колесо на льду, воде или ином покрытии, другое на асфальте). Как правило, в результате автомобиль начинает тянуть в сторону. Для исправления ситуации на рулевой механизм подаются управляющие сигналы, корректирующие положение авто. В принципе, рассмотренная ситуация является типичной для работы подобной системы управления. Возможность возникновения заноса, может повториться при резком маневрировании, в таком случае VSM также поможет удержать автомобиль от заноса.
Необходимо отметить, что подобное устройство не входит в стандартную комплектацию автомобиля.
Такая система активного контроля, как VSM, в первую очередь обеспечивает устойчивость автомобиля на курсе, при его движении по отличающемуся покрытию под разными колесами. В этом случае формируются не только сигналы на притормаживание отдельного колеса, но и на рулевое управление, благодаря чему авто продолжает двигаться по заданному курсу, и удается избежать его заноса.
znanieavto.ru
3.7. СИСТЕМА УПРАВЛЕНИЯ СТАБИЛИЗАТОРОМ
1—корпус; 2—крышка; 3—сердечник; 4—болт; 5—гайка; 6—трос (трубка условно не показана)
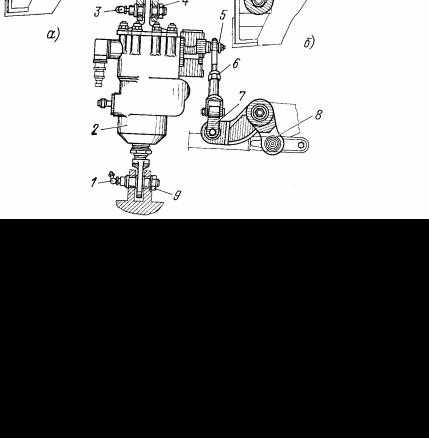
Рис. 3.39. Установка рулевого привода РП-59 (на правом крыле, нервюра 16): а—интерцептор закрыт; б—интерцептор открыт;
1, 3—масленки; 2—рулевой привод; 4, 9— болты; 5—входное звено; 6—регулируемая тяга; 7—шарнир; 8—качалка
Для уборки интерцепторов достаточно нажать на верхнюю часть рукоятки и перевести ее вперед по направлению полета до упора, где стопор автоматически войдет в конусный паз сектора и застопорит рукоятку. При установке интерцепторов в убранное положение и при установке штоков рулевых приводов на замки гаснет табло на средней приборной доске пилотов и прекращается подача питания к рулевому приводу. Если хотя бы один рулевой привод РП-59 не встал на замок, о чем сигнализирует летчику то же световое табло, то питание подается ко всем рулевым приводам, пока рулевой привод не встанет на замок.
В случае отказа гидросистемы при выпущенном положении интерцепторов гидравлическое питание отключается кнопкой 21 (см. рис. 2.6), расположенной на средней приборной доске пилотов. Аварийная уборка интерцепторов осуществляется под действием аэродинамической нагрузки со скоростью 3 град/с, а также может осуществляться пилотом при перемещении рукоятки управления интерцепторами в крайнее переднее положение. Интерцепторы при этом уберутся до углов 1,7°—2°. В процессе уборки и в убранном положении интерцепторы демпфируются рулевыми приводами.
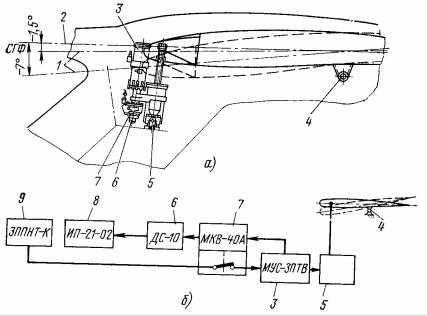
На самолете применен переставляемый стабилизатор, что позволяет эксплуатировать самолет с более передней центровкой на взлете и посадке при сохранении требуемых запасов углов отклонения руля высоты и без увеличения усилий на штурвале. Система управления стабилизатором изменяет угол положения стабилизатора относительно строительной горизонтали фюзеляжа (СГФ) от —1°30′ до —7°.
В процессе эксплуатации применяются два положения стабилизатора: основное (полетное) —1°30′ и взлетно-посадочное — 7°.
Система управления стабилизатором состоит из электромеханизма МУС-ЗПТВ 3 (рис. 3.40), подъемника 5, переключателя 9, индикатора положения стабилизатора 8.
Рис. 3.40. Принципиальная схема управления стабилизаторам:
а—схема перестановки стабилизатора; б—блок-схема управления стабилизатором; 1— хорда стабилизатора: 2—линия, параллельная СГФ; 3—электромеханизм МУС-ЗПТВ; 4— ось вращения; 5—подъемник; 6—датчик ДС-10; 7—механизм концевых выключателей МКВ-40А; 8—индикатор положения стабилизатора ИП21-02; 9—переключатель управления
Электромеханизм МУС-ЗПТВ (рис. 3.41) служит для приведения в действие системы управления стабилизатором. В электромеханизме имеются два электродвигателя переменного тока, связанных между собой через редуктор с суммирующим дифференциалом. Реверсирование осуществляется путем переключения фаз обмоток электродвигателей.
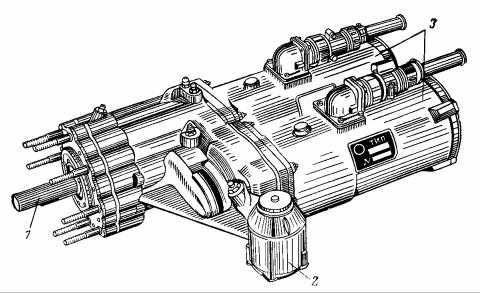
Рис. 3.41. Электромеханизм управления стабилизатором МУС-ЗПТВ: 1—выходной вал; 2—руной привод; 3—электродвигатель
Питаются электродвигатели от разных электроцепей. В каждый электродвигатель встроена электромагнитная муфта сцепления — торможения, которая питается от сети постоянного тока. В случае выхода из строя одного электродвигателя или его отключения электромагнитная муфта стопорит кинематическую цепь этого электродвигателя. При этом другой электродвигатель обеспечивает прежнюю величину рабочего момента на выходном валу, но с меньшей вдвое скоростью. При выключении электромеханизма МУС-ЗПТВ система управления стабилизатором стопорится тормозными электромагнитными муфтами электродвигателей.
Вращение от электродвигателей передается через дифференциал, суммирующий вращение двух одновременно работающих электродвигателей, и затем через фрикционную муфту на выходной вал 1 электромеханизма. Фрикционная муфта предохраняет электромеханизм, а также систему управления стабилизатором от перегрузки.
В случае перегрузки выходного вала фрикционная муфта будет пробуксовывать, ограничивая крутящий момент, развиваемый приводным валом. Для регулировки и проверки системы управления стабилизатором на земле при обесточенном состоянии обоих электродвигателей перемещение стабилизатора может осуществляться вручную посредством съемной рукоятки ручного привода 2. Момент на рукоятке ручного привода при перекладке стабилизатора не более 0,1 кгс·м. Запас хода подъемника при крайних положениях стабилизатора (—1°30′ и —7°) составляет не менее 72 оборотов ручного привода электромеханизма МУС-ЗПТВ.
Подъемник стабилизатора предназначен для преобразования вращения выходного вала электромеханизма МУС-ЗПТВ в возвратно-поступательное движение винта для отклонения стабилизатора. Подъемник установлен с помощью кронштейна на торцевой нервюре киля. Винт подъемника посредством болта соединен с кронштейном, закрепленным на переднем лонжероне стабилизатора.
Ведущая шестерня 6 (рис. 3.42) состыкована одним концом с электромеханизмом МУС-ЗПТВ; а другим — с механизмом концевых выключателей МКВ-40А. Ведомая шестерня 7 соединена с гайкой 8. Внутри гайки 8 перемещается винт 9. Винтовая пара имеет трапецеидальную резьбу. Для повышения надежности винт подъемника дублирован расположенным внутри его стержнем 10. В крайних положениях ход винта ограничивается упорами 2, 5. Подъемник присоединяется к узлам крепления на киле и
113
стабилизаторе посредством карданных узлов 1, 4. Электромеханизм МУС-ЗПТВ приводит во вращение гайку 8. Винт подъемника 9, перемещаясь в гайке 8, отклоняет стабилизатор.
Управление стабилизатором осуществляется переключателем 1 (см. рис. 3.15), колпачок блокировки которого имеет разные варианты. Перестановка стабилизатора в полетное положение производится переводом переключателя в положение «Пикир.», а перестановка во взлетно-посадочное положение — переводом переключателя в положение «Кабрир.».
На самолетах последних выпусков управление стабилизатором осуществляется в автоматическом или ручном режиме. Режим управления стабилизатором определяется положением колпачка переключателя ручного управления, установленного на электрощитке козырька средней приборной доски пилотов.
При закрытом колпачке включены цепи автоматического управления и выключены цепи ручного управления. При открытом колпачке выключены цепи автоматического управления и включены цепи ручного управления.
В автоматическом режиме управление стабилизатором осуществляется совместно с управлением закрылками при перемещении рукоятки для выпуска или уборки закрылков. При повороте рукоятки управления закрылками из положения 0° на любой угол одновременно с выпуском закрылков на заданный рукояткой угол происходит перестановка стабилизатора во взлетное положение —3° (по индикатору) при нейтральном положении переключателя ручного управления.
Перестановка стабилизатора в посадочное положение —5°30′ осуществляется перестановкой переключателя ручного управления стабилизатором в положение «Кабрир.» при закрытом колпачке. При этом перестановка стабилизатора будет происходить при углах отклонения закрылков не менее 31°.
Рис. 3.42. Подъемник стабилизатора:
1, 4—карданные узлы; 2, 5—упоры; 3—корпус; 6—ведущая шестерня; 7—ведомая шестерня; 8—гайка; 9—винт; 10—стержень
При установке рукоятки управления закрылками в положение 0° одновременно с уборкой закрылков происходит перестановка стабилизатора в полетное положение 0°(по индикатору) независимо от положения переключателя ручного управления стабилизатором.
При открытии колпачка переключателя ручного управления в процессе перестановки стабилизатора в автоматическом режиме при нейтральном положении переключателя система обесточивается и стабилизатор останавливается.
studfiles.net
Система динамической стабилизации автомобиля ESP что это?
")
Оснащение современного автомобиля делает процесс управления простым. В то же время нельзя сказать, что это уж слишком легкое дело. Требуется учитывать много нюансов, чтобы не оказаться на обочине не только дороги, но и жизни. Важны дорожные изгибы, погодные условия, опыт вождения и многое другое. Автомобиль способен вести себя на дороге непредсказуемо. Утрата контроля может спровоцировать аварию. Как предотвратить такое развитие событий?
Содержание:
Это можно сделать с помощью ESP. Под этой аббревиатурой скрывается система, обеспечивающая курсовую устойчивость. С позиции английского языка расшифровывается так: Electronic Stability Program.
Что такое ESP
Под ней понимается система безопасности, которая посредством компьютера управляет автомобилем в нестандартных ситуациях. Если автомобиль теряет устойчивость на дороге, то есть начинает выписывать опасную траекторию, то его положение принудительно выравнивается.
ESP не является единым обозначением систем динамической стабилизации. Перед нами популярная торговая марка и не более. Поэтому будем рассматривать именно ее. Хотя своя популярность есть и у других подобных систем, например, ESC и DSC.
История
Первый патент на систему рассматриваемого вида был выдан в 1959 году. Разработка называлась «Управляющее устройство». Ее инициатором стал концерн Daimler-Benz. Результат оказался посредственным. Инженеры концерна не смогли предложить продукт, который мог бы стать реальным помощником водителя.
Все изменилась спустя много лет. В 1994 году премиальные Мерседесы получили оснащение полноценной системой безопасности. Несколько позднее курсовая стабилизация стала доступна на серийных машинах компании Mercedes-Benz.
Устройство

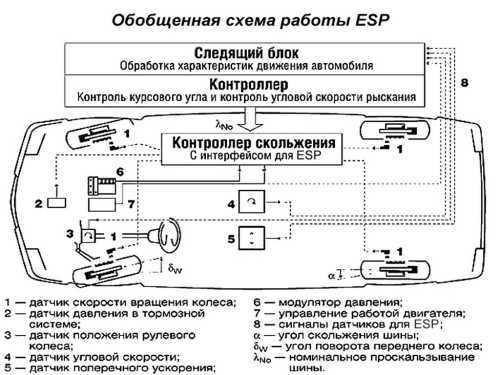
Сама по себе ESP не способна выполнять возложенные на нее задачи. В помощь требуются электронные датчики. Обработкой поступающих от них сигналов занимается специальный блок. Электроника вовремя информирует систему о неадекватном поведении автомобиля, что дает возможность вернуть контроль над транспортным средством.
Перечень составных элементов формируется за счет:
- основного блока, предназначенного для обработки сигналов от датчиков и управления конкретными устройствами;
- датчиков, фиксирующих, с какой скоростью вращается каждое колесо;
- датчиков, измеряющих скорость и отклонение транспортного средства по оси. Датчики этого вида находятся внутри одного корпуса;
- контроллера, способного определить, как рулевое колесо изменяет угол поворота;
- гидравлического блока, инициирующего тормозные усилия.
К помощникам также относят следующие системы:
- ABS – исключение вероятности блокировки колес во время торможения;
- EBD – распределение усилий при управлении тормозными дисками;
- ASR – контроль того, насколько проскальзывают колеса, с последующим перераспределением крутящего момента. Исключается пробуксовка;
- EDS – дополнение к ASR. Блокировка дифференциального механизма.
Как это работает
Курсовая стабилизация посредством ESP невозможна без ABS. Антиблокировочная система – это важный момент корректировки поведения автомобиля. Процесс стабилизации также обеспечивается за счет функциональности антипробуксовочной системы и блока, способного изменять режим работы двигателя.

ESP определяет развитие заноса по нескольким параметрам. Например, при малом угле поворота колес может фиксироваться превышение поперечного ускорения и значительное изменение угла поворота транспортного средства. Это выходит за рамки «правильной езды», поэтому система начинает действовать.
На практике происходит подтормаживание конкретных колес или ослабление тормозного усилия. Гидромодулятор изменяет состояние тормозной системы в части ее давления. Работа силового агрегата корректируется. Блок-контроллер сокращает подачу топлива, что уменьшает крутящий момент, передающийся на колеса. В результате машине придается прежняя траектория.
В структуре имеется главный блок, принимающий и обрабатывающий информацию, поступающую от датчиков. Под такой информацией понимается несколько моментов: с какой скоростью вращаются колеса, в каком положении руль и насколько давление в тормозной системе соответствует норме. На основе подобных данных ESP принимает решение, как ей действовать. При этом наиболее важны сигналы от двух датчиков, считывающих поперечное ускорение и угловую скорость.
Рассмотрим на примере упрощенную схему того, как происходит курсовая стабилизация.
Занос
На блок-контроллер поступают данные:
- задняя ось начинает смещаться по тому направлению, куда заносит;
- величина скорости скольжения выходит за рамки допустимых значений.
Если вы опытный водитель, то поддадите газу и постараетесь выйти из заноса. Ключевое слово здесь «опытный», но за рулем в большинстве своем оказываются те, кто не был в подобных ситуациях. Они могут растеряться. Также стоит учитывать невнимательность. Именно здесь и возникает необходимость в ESP.
Система возвращает автомобиль на прежний курс с помощью торможения переднего колеса с внешней стороны.
Снос

Датчики сигнализируют о нестандартном поведении транспортного средства:
- фиксируется смещение передней оси по такому направлению, как внешняя сторона поворота;
- скорость рысканья определяется как небольшая.
Система стабилизирует автомобиль, что достигается торможением заднего колеса с внутренней стороны.
Обязательность наличия ESP

Эксплуатируемые в странах ЕС автомобили оснащаются ESP, что узаконено с 2014 года. Это обязательно для минимальной комплектации. Что касается России, то такое правило также имеется, но оно действует лишь при сертификации новых авто. Для остальных машин усовершенствование этого плана возможно только за дополнительную плату.
Самостоятельная установка
При желании и определенном умении можно установить ESP самому. Для этого необходимо знать, какие элементы системы нужны, куда они устанавливаются, как использовать сканер и соответствующее ПО. В остальном надо будет приобрести:
- блок-контроллер;
- СИМ-модуль;
- датчик рысканья;
- штекер.
Неисправности
Сигнал о том, что ESP вышла из строя, поступает на приборную панель, где имеется контрольный указатель. Такая ситуация возможна в результате:
- поломки блок-контроллера;
- обрыва цепи, что преимущественно происходит с датчиками скорости;
- выхода из строя датчика тормозного усилия и т. д.
В любом случае надо вовремя реагировать на сигнал неисправности. Для конкретизации проблемы требуется проведение компьютерной диагностики.
Вывод

Некоторые автолюбители считают, что ESP – это препятствование нормальному вождению и невозможность выхода из критических ситуаций. Последнее утверждение верно, но отчасти. Процент неадекватного поведения ESP ничтожно мал.
Система, обеспечивающая курсовую устойчивость, эффективна. Она не позволяет водителям вести себя на дроге слишком вольготно. Пресекаются попытки вождения, выходящие за рамки дозволенного. Потеря же мощности на скользких покрытиях в условиях бездорожья покрывается электронной имитацией блокировок, что помогает преодолевать препятствия, когда происходит диагональное вывешивание.
Видео
Поделитесь с друзьями!
autoiwc.ru
3. Системы стабилизации, системы программного управления, следящие системы.
Стабилизирующая САУ – система, алгоритм функционирования которой содержит предписание поддерживать значение управляемой величины постоянным:
x(t) xз = const. (1.3)
Знак означает, что управляемая величина поддерживается на заданном уровне с некоторой ошибкой.
Стабилизирующие САУ самые распространенные в промышленной автоматике. Их применяют для стабилизации различных физических величин, характеризующих состояние технологических объектов. Примером стабилизирующей САУ является система регулирования возбуждения синхронного генератора
Программная САУ – система, алгоритм функционирования которой содержит предписание изменять управляемую величину в соответствии с заранее заданной функцией времени:
x(t) xз(t) = fп(t). (1.4)
Примером программной САУ является система управления активной мощностью нагрузки синхронного генератора на электрической станции в течение суток. Управляемой величиной в системе служит активная мощность нагрузки Р генератора. Закон изменения задания активной мощности Рз (задающего воздействия) определен как функция времени t в течение суток
Следящая САУ –система, алгоритм функционирования которой содержит предписание изменять управляемую величину в соответствии с заранее неизвестной функцией времени: x(t) xз(t) = fс(t). (1.5)
Примером следящей САУ является система управления активной мощностью нагрузки синхронного генератора на электрической станции в течение суток. Управляемой величиной в системе служит активная мощность нагрузки Р генератора. Закон изменения задания активной мощности Рз (задающего воздействия) определяется, например, диспетчером энергосистемы и имеет неопределенный характер в течение суток.
В стабилизирующих, программных и следящих САУ цель управления заключается в обеспечении равенства или близости управляемой величины x(t) к ее заданному значению xз(t). Такое управление, осуществляемое с целью поддержания x(t) xз(t), (1.6)называется регулированием.
Управляющее устройство, осуществляющее регулирование, называется регулятором, а сама система – системой регулирования.
5. Преобразование Лапласа. Основные свойства преобразования Лапласа
Преобразованием Лапласа называют соотношение
 ставящее
функции x(t) вещественного переменного в соответствие
функцию X(s) комплексного
переменного s
(s
= σ + jω).
При этом х(t) называют оригиналом,
а Х(s)
— изображением или изображением по
Лапласу.
То, что х(t) имеет
своим изображением Х(s) или
оригиналом Х(s) является х(t), записывается
так:
ставящее
функции x(t) вещественного переменного в соответствие
функцию X(s) комплексного
переменного s
(s
= σ + jω).
При этом х(t) называют оригиналом,
а Х(s)
— изображением или изображением по
Лапласу.
То, что х(t) имеет
своим изображением Х(s) или
оригиналом Х(s) является х(t), записывается
так:
илиИногда также пользуются символической записью
где L – оператор Лапласа.
Предполагается, что функция х(t), которая подвергается преобразованию Лапласа, обладает следующими свойствами: х(t) определена и кусочно-дифференцируема на всей положительной числовой полуоси [0, ∞]; х(t) = 0 при t < 0; существуют такие положительные числа М и с, что | x(t) | ≤ Mect при 0 ≤ t < ∞. Функции, обладающие указанными тремя свойствами, часто называют функциями-оригиналами.
Соотношение определяющее по известному изображению его оригинал (в точках непрерывности последнего), называютобратным преобразованием Лапласа. В нем интеграл берется вдоль любой прямой ReS = σ0 > с. Символически обратное преобразование Лапласа можно записать так:
где символ L-1 — обратный оператор Лапласа.
studfiles.net
Cистема курсовой устойчивости и динамической стабилизации
В своем стремлении сделать автомобили как можно более безопасными, производители оснащают их всевозможными вспомогательными системами, предназначенными для того, чтобы в нужный момент помочь водителю избежать опасности. Одна из них – это система курсовой устойчивости. На автомобилях разных марок она может называться по-разному: ESC у Honda, DSC у BMW, ESP у подавляющего большинства европейских и американских автомобилей, VDC у Subaru, VSC у Toyota, VSA у Honda и Acura, но предназначение у системы курсовой стабилизации одно – не позволить автомобилю сойти с заданной траектории при любых режимах езды, будь то разгон, торможение, движение по прямой или в повороте.
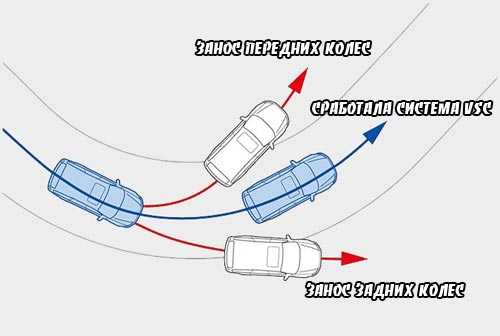
Работа ESC, VDC и любой другой может быть проиллюстрирована следующим образом: машина движется в повороте с набором скорости, внезапно одна сторона попадает на занесенный песком участок. Сила сцепления с дорогой резко меняется, и это может привести к заносу или сносу. Чтобы предотвратить уход с траектории, система динамической стабилизации моментально перераспределяет крутящего момента между ведущими колесами, и при необходимости подтормаживает колеса. А в случае, если автомобиль оснащен активной системой рулевого управления, изменяется угол поворота колес.

Впервые система курсовой устойчивости автомобиля появилась в далеком 1995 году, тогда получив название ESP или Electronic Stability Programme, и с тех пор стала наибольшее распространенной в автомобилестроении. В дальнейшем устройство всех систем будет рассматриваться на ее примере.
Устройство систем ESC, DSC, ESP, VDC, VSC, VSA
Система курсовой устойчивости представляет собой систему активной безопасности высокого уровня. Она является составной, состоящей из более простых, а именно:
Данная система состоит из набора входных датчиков (давления в тормозной системе, угловой скорости колес, ускорения, скорости поворота и угла поворота руля и других), блока управления и гидравлического блока.
Одна группа датчиков применяется для оценки действий водителя (данные об угле поворота рулевого колеса, давлении в тормозной системе), другая помогает анализировать фактические параметры движения машины (оценивается частота вращения колес, поперечное и продольное ускорение, скорость поворота авто, давление в тормозной).
ЭБУ ESP, основываясь на данных, полученных от датчиков, подает соответствующие команды исполнительным устройствам. Помимо систем, входящих в состав самой ESP, ее блок управления взаимодействует с блоком управления двигателем и блоком управления АКПП. От них он также получает необходимую информацию и посылает им управляющие сигналы.
Система динамической стабилизации работает, посредством гидравлического блока ABS.
Принцип работы систем ESC, DSC, ESP, VDC, VSC, VSA
ЭБУ системы курсовой устойчивости работает непрерывно. Получая информацию от датчиков, анализирующих действия водителя, вычисляет желаемые параметры движения автомобиля. Полученные результаты сравниваются с фактическими параметрами, информация о которых поступает от второй группы датчиков. Несовпадение распознается ESP как неконтролируемая ситуация, и она включается в работу.
Стабилизируется движение следующими способами:
- подтормаживаются определенные колеса;
- изменяется крутящий момент двигателя;
- если автомобиль имеет систему активного рулевого управления, изменяется угол поворота передних колес;
- если машина имеет адаптивную подвеску, изменяется степень демпфирования амортизаторов.
Крутящий момент мотора изменяется одним из нескольких способов:
- изменяется положение дроссельной заслонки;
- пропускается впрыск горючего или импульс зажигания;
- изменяется угол опережения зажигания;
- отменяется переключение передачи в АКПП;
- в случае полного привода осуществляется перераспределение крутящего момента на осях.
Насколько необходима система динамической стабилизации
Существует немало противников каких-либо вспомогательных электронных систем в автомобилях. Все они, как один, утверждают, что ESC, DSC, ESP, VDC, VSC, VSA и прочие только расхолаживают водителей и к тому же являются просто способом вытянуть из покупателя побольше денег. Свои доводы они подкрепляют еще и тем, что еще 20 лет назад, в автомобилях не было подобных электронных помощников, и, тем не менее, водители прекрасно справлялись с управлением.
Надо отдать должное, что доля истины в этих аргументах есть. В самом деле, многие водители, уверовав в то, что помощь ESC, DSC, ESP, VDC, VSC, VSA дает им практически безграничные возможности на дороге, начинают ездить, пренебрегая здравым смыслом. Итог может быть очень печальным.
Тем не менее, согласиться с противниками систем активной безопасности нельзя. Система курсовой устойчивости необходима, хотя бы как страховочная мера. Как показывают исследования, человек затрачивает намного больше времени на оценку ситуации и правильную реакцию, чем электронная система. ESP уже помогла сберечь жизнь и здоровье многим участникам дорожного движения (особенно начинающим водителям). Если же водитель отточил свое мастерство до такой степени, что система, хоть и работает, но не вмешивается в действия человека, его можно только поздравить.
Дополнительные возможности систем ESC, DSC, ESP, VDC, VSC, VSA
Система курсовой устойчивости, помимо своей основной задачи – динамической стабилизации автомобиля, может выполнять и дополнительные задачи, такие как предотвращение опрокидывания машины, предотвращение столкновения, стабилизация автопоезда и другие.
Внедорожники, в силу высоко расположенного центра тяжести, склонны к опрокидыванию при вхождении в поворот на высокой скорости. Для предотвращения такой ситуации предназначена система предотвращения опрокидывания, или Roll Over Prevention (ROP). В целях повышения устойчивости подтормаживаются передние колеса автомобиля, и снижается крутящий момент двигателя.
Для реализации функции предотвращения столкновения системам ESC, DSC, ESP, VDC, VSC, VSA дополнительно требуется адаптивный круиз-контроль. Вначале водителю подаются звуковые и визуальные сигналы, если реакции не последовало – автоматически нагнетается давление в тормозной системе.
Если система курсовой устойчивости выполняет функцию стабилизации автопоезда на автомобилях, оснащенных тягово-сцепным устройством, то она предотвращает рыскание прицепа за счет подтормаживания колес и уменьшения крутящего момента двигателя.
Еще одна полезная функция, которая бывает особенно необходима при езде по серпантину, заключается в повышении эффективности тормозов при нагреве (название Over Boost или Fading Brake Support). Работает она просто – при нагреве тормозных колодок автоматически повышается давление в тормозной системе.
Наконец, система динамической стабилизации может автоматически удалять влагу с тормозных дисков. Активизируется такая функция при включенных стеклоочистителях на скорости свыше 50 км/ч. Принцип действия заключается в кратковременном регулярном повышении давления в тормозной системе, в результате чего колодки прижимаются к тормозным дискам, те нагреваются и попавшая на них вода частично снимается колодками, а частично испаряется.
znanieavto.ru
Электронная система стабилизации управления автомобилем ESP
Для предотвращения потери управляемости автомобиля при экстренном торможении на современных автомобилях применяется электронная система стабилизации ESP (Electronic Stability Program – электронная программа стабилизации).
Статистика показывает, что электронная система стабилизации существенным образом влияет на безопасность движения. Например, по данным «Даймлер-Крайслер» количество аварий из-за потери водителем контроля над автомобилем снизилось с момента внедрения ESP в серию на 42%. Американская национальная служба безопасности движения NHTSA дает близкий показатель – 35%. Количество смертей в таких ДТП снизилось в США на 30%.
В систему стабилизации управления автомобилем входят:
- ABS (антиблокировочная система)
- EBV (электронное распределение тормозных усилий)
- ASR (антипробуксовочная система)
- EDS (электронная блокировка дифференциала)
- MSR (регулировка крутящего момента двигателя)
- HBA (гидравлический тормозной ассистент)
Конструктивные узлы ESP включает основные конструктивные узлы ABS. Дополнительными являются датчики угловых и поперечных ускорений и сенсор угла поворота рулевого колеса.
Принципиальное отличие ESP от ABS в том, что она непрерывно следит за соответствием ускорений автомобиля по желанию водителя, выраженному в повороте рулевого колеса, в то время как ABS включается только при торможении. Если ESP понимает, что ускорения машины достигли критических (начинается занос), система приступает к подтормаживанию колес, сбросу или прибавлению скорости вращения колес.
Общая компоновка ESP показана на рисунке:
Рис. Электронная система стабилизации управления автомобилем:
1 – электрогидравлический блок с контроллером; 2 – датчики частоты вращения колес; 3 – датчик угла поворота рулевого колеса; 4 – датчик линейных и угловых ускорений; 5 – электронный блок управления двигателем
ESP выбирает тормозные усилия для каждого колеса отдельно таким образом, чтобы результирующая тормозных сил противодействовала моменту, стремящемуся развернуть автомобиль вокруг вертикальной оси, и удерживала его на оптимальной траектории.
Если автомобиль плохо входит в поворот и скользит передними колесами наружу (недостаточная поворачиваемость), ESP притормаживает внутреннее заднее колесо.
В случае, когда автомобиль в результате заноса задней части пытается повернуть круче, чем необходимо (избыточная поворачиваемость), ESP исправляет ошибку притормаживанием наружного переднего колеса.
Чтобы предотвратить занос заднеприводного автомобиля, ESP уменьшает частоту вращения коленчатого вала двигателя. Благодаря этому возникает стабилизирующий момент сил, возвращающий автомобиль на безопасную траекторию движения.
При угрозе опрокидывания автомобиль стабилизируется за счет уменьшения поперечного ускорения, которое достигается достаточно сильным притормаживанием передних колес и одновременным снижением крутящего момента двигателя. Активный усилитель тормозов быстро нагнетает давление на входном трубопроводе насоса обратной подачи, благодаря этому давление в тормозном приводе моментально возрастает.
Функция стабилизации автопоезда используется на автомобилях с тягово-сцепным устройством. Слабое рыскание прицепа при определенных условиях может усилиться до опасных значений. Это происходит, как правило, в скоростном диапазоне от 75 до 120 км/ч. Если прицеп начал рыскать при некоторой критической скорости, то амплитуда рыскания постоянно увеличивается (явление резонанса). Рыскание передается буксиру, который тоже начинает совершать колебательные движения влево и вправо вокруг вертикальной оси. Такие колебательные движения регистрируются датчиком угла рысканья и анализируются блоком управления. При необходимости сначала оказывается регулирующее воздействие то на одно, то на другое переднее колесо. Если этого недостаточно, блок управления посылает сигнал блоку управления двигателя на уменьшение частоты вращения коленчатого вала, чтобы сбросить скорость, при этом одновременно притормаживаются все четыре колеса.
Наличие прицепа, подключенного к электросети автомобиля, распознается блоком управления автоматически. Функция стабилизации автопоезда отключается, потому что поведение автомобиля в условиях бездорожья может быть ошибочно принято за рыскание прицепа.
Современные системы ESP могут притормаживать одновременно до трех колес, причем каждое с разным усилием.
Кроме притормаживания колес ESP может автоматически вмешиваться в рулевое управление, выбирая наиболее оптимальный в данной ситуации угол поворота рулевого колеса, а также изменять характеристики амортизаторов подвески и трансмиссии. Если система ESP выявит склонность водителя к гоночному стилю, порог чувствительности системы снижается, чтобы приспособиться к данному стилю вождения. Система ESP может принудительно отключаться по желанию водителя, но после выключения зажигания ESP вновь активируется.
Электронная блокировка дифференциала EDS применяется для устранения пробуксовки колес при сохранении приемлимых ходовых качеств автомобиля, без вмешательства водителя. Устройство управления блокировкой дифференциала контролирует при помощи датчиков АБС частоту вращения колес.
Если дорожное покрытие под одной стороной автомобиля скользкое, вследствие чего при скорости до 80 км/ч возникает различие в частоте вращения ведущих колес примерно в 100 об/мин, тогда путем притормаживания пробуксовывающего колеса частота вращения колес выравнивается, а на другое колесо посредством действия дифференциала передается повышенное тяговое усилие.
Для того чтобы тормозной механизм приторможенного колеса слишком сильно не нагревался, блокировка дифференциала при больших нагрузках автоматически отключается. Как только тормозной механизм охладится, противобуксовочная система колеса автоматически включается вновь.
При необходимости ESP вмешивается в работу системы управления двигателем и изменяет крутящий момент в соответствии с ситуацией.
ustroistvo-avtomobilya.ru
1.3 Принцип адаптации
В управлении начинает использоваться принцип адаптации, который применяется тогда, когда параметры системы под влиянием внешних факторов изменяются непредвиденным заранее образом настолько сильно, что движение системы претерпевает существенные качественные изменения. При этом рассмотренные выше принципы управления уже не дают возможности обеспечить нормальное функционирование системы и необходимо в процессе управления изменять параметры и даже структуру системы.
2 Классификация систем автоматического управления
По характеру изменения управляющего воздействия различают системы автоматической стабилизации, программного регулирования и следящие системы. По виду передаваемых сигналов выделяют системы непрерывные, с гармонической модуляцией, импульсные, релейные и цифровые. По способу математического описания, принятого при исследовании, выделяют линейные и нелинейные системы. Обе группы могут быть представлены непрерывными, дискретными и дискретно-непрерывными системами. По виду контролируемых изменений своих свойств различают неприспосабливающиеся и приспосабливающиеся (адаптивные) системы. В последнем классе можно выделить самонастраивающиеся системы с самонастройкой параметров или воздействий и самоорганизующиеся системы с контролируемыми изменениями структуры.
В зависимости от принадлежности источника энергии, при помощи которого создаётся управляющее воздействие, системы могут быть прямого и непрямого действия. В системах прямого действия используется энергия управляемого объекта. К ним относятся простейшие системы стабилизации (уровня, расхода, давления и т.п.), в которых воспринимающий элемент через рычажную систему непосредственно действует на исполнительный орган (заслонку, клапан и т.д.). В системах непрямого действия управляющее воздействие создаётся за счёт энергии дополнительного источника.
2.1 Системы автоматической стабилизации, программного
регулирования и следящие системы
Системы автоматической стабилизации характеризуются тем, что в процессе работы системы управляющее воздействие остаётся величиной постоянной. Основной задачей системы автоматической стабилизации является поддержание на постоянном уровне с допустимой ошибкой регулируемой величины независимо от действующих возмущений. Действующие возмущения вызывают отклонение регулируемой величины от предписанного ей значения. Отклонением регулируемой величины называется разность между значением регулируемой величины в данный момент времени и её значением, принятым за начало отсчёта. Понятие отклонения регулируемой величины является характерным для систем автоматической стабилизации и позволяет дать качественную оценку динамическим свойствам систем этого класса.
Системами автоматической стабилизации являются различного рода САР (системы автоматического регулирования), предназначенные для регулирования скорости, напряжения, температуры, давления; например, стабилизатор курса самолёта и т.д. Система автоматического регулирования представляет собой комплекс, состоящий из регулируемого объекта и регулятора. Регулятор включает в себя такие основные элементы, как элемент сравнения, усилитель, исполнительный элемент и корректирующие устройства.
Обычно системы автоматического регулирования представляют в виде структурных схем. Эта структурная схема может представлять все три группы систем, то есть системы автоматической стабилизации, следящие системы и системы программного регулирования. Принципиальной разницы между этими системами по применению и назначению элементов нет. Есть некоторое различие в задающем элементе. Так, например, задающий элемент в системе автоматической стабилизации вырабатывает управляющее воздействие постоянной величины, которое называется установкой регулятора и с которой сравнивается регулируемая величина при работе системы. При работе схемы в режиме следящей системы задающий элемент должен обеспечить измерение управляющего сигнала, поступающего на следящую систему извне.
Системы программного регулирования отличаются тем, что управляющее воздействие изменяется по заранее установленному закону в функции времени или координат системы. О точности воспроизведения управляющего воздействия на выходе системы воспроизведения судят по величине ошибки, которая определяется разность между управляющим воздействием и регулируемой величиной в данный момент времени. Примером систем программного регулирования могут служить системы управления копировально-фрезерным станком.
В следящих системах управляющее воздействие также является величиной переменной, но математическое описание его во времени не может быть установлено, так как источником сигнала служит внешнее явление, закон изменения которого заранее неизвестен. В качестве примера следящей системы можно указать на радиолокационную станцию автоматического сопровождения самолёта.
Так как следящие системы предназначены для воспроизведения на выходе управляющего воздействия с возможно большей точностью, то ошибка, так же как и в случае систем программного регулирования, является той характеристикой, по которой можно судить о динамических свойствах следящей системы. Ошибка в следящих системах, как и в системах программного регулирования, является сигналом, в зависимости от величины которого осуществляется управление исполнительным двигателем.
Во всех трёх группах систем управляющее воздействие сравнивается с регулируемой величиной. Для выполнения операции сравнения применяются устройства, называемые элементами сравнения. Управляющее воздействие и регулируемая величина, поступающие на два входа элемента сравнения, должны быть предварительно преобразованы и приведены к сигналам одного вида энергии и размерности. Эти операции выполняются измерительным элементом со стороны управляющего воздействия.
В большинстве случаев непосредственное использование выходного сигнала элемента сравнения для приведения в действие регулирующего органа объекта не представляется возможным. Поэтому возникает необходимость в предварительном усилении сигнала как по величине, так и по мощности. Кроме того, часто необходимо осуществить и преобразование сигнала, связанное с формой представления воздействия, и перевод его из одного вида энергии в другой. Эти функции обычно выполняются тем или иным усилителем. Таким образом, в системах автоматического регулирования в числе основных устройств применяют усилительный элемент.
В практике могут встретиться случаи, когда применение усилителей не обязательно. При этом регулятор непосредственно действует на регулирующий орган и называется регулятор прямого действия. При наличии усилителей регулирующее устройство называется регулятором непрямого действия. В зависимости от наличия усилителей, автоматическая система называется, соответственно, системой прямого, либо непрямого регулирования. Приведение в действие регулирующего органа объекта обычно осуществляется с помощью исполнительного элемента.
В системе автоматического регулирования, составленной из объекта регулирования, элемента сравнения, усилителя и исполнительного элемента, динамические процессы могут протекать недостаточно качественно, по тем или иным причинам процесс регулирования может оказаться вообще неустойчивым. Для того чтобы система автоматического регулирования обладала устойчивым процессом и удовлетворяла требуемым условиям качества процесса регулирования, применяют корректирующие устройства.
studfiles.net