ESP — система динамической стабилизации автомобиля
Electronic Stability Program или ESP (аббревиатура) – именно так называют электронную систему динамической стабилизации автомобиля. Эта технология призвана помочь водителю в критических моментах езды.
Суть данной системы заключается в предотвращении опасных заносов или бокового скольжения автомобиля. Если при выполнении каких-либо маневров автомобиль начинает заносить, ESP сохраняет его устойчивость, тем самым помогая водителю контролировать процесс езды. Часто такую электронику называют «противозаносной» или «системой поддержания курсовой устойчивости».
Первую подобную систему, под названием «управляющее устройство», разработали в компании Daimler-Benz еще в конце 50-х годов. Однако, использовать ее в автомобиле стали, лишь, в 1994 году. Модели Mercedes-Benz CL 600 стали первыми автомобилями, комплектовавшимися ESP. Затем, установка системы производилась на все модели S-класса и SL.
Такой вид имеет блок управления ESP на автомобилях Mercedes-Benz.
В наше время такой системой оснащаются, практически, все автомобили, не зависимо от класса и стоимости.
Основным узлом ESP является электронный блок-контроллер. Он постоянно осуществляет обработку сигналов, которые поступают с множества датчиков(датчик положения рулевого колеса, датчик давления в тормозной системе). Контроль скорости вращения колес производится с помощью датчиков AБС. Система ESP связана с антипробуксовочной системой и блоком управления двигателем.
Основную информацию блок-контроллер получает с двух специальных сенсоров – угловой скорости относительно вертикальной оси и поперечного ускорения. Принцип их работы заключается в фиксации бокового скольжения на вертикальной оси, вычисления его величины и даче команд на устранение угрозы. Благодаря всем установленным датчикам, ESP постоянно фиксирует скорость автомобиля, обороты двигателя, на какой угол повернут руль, наличие заноса и т.
Схема работы ESP
Путем постоянного анализа поступающих с датчиков сигналов, контроллер делает сравнение между поведением автомобиля в реальности и тем, что загружено в его программе. Если между этими параметрами возникает несоответствие, блок-контроллер расценивает такую ситуацию как опасную и дает команды для ее устранения. Это может быть притормаживание одного или нескольких колес. Выбор переднего или заднего колеса, внешнего или внутреннего по отношению к повороту, системой определяется, в зависимости от конкретной ситуации.
Притормаживание колес производится с помощью гидромодулятора АБС, который нагнетает давление в тормозной системе. Синхронно с этим действием, поступает команда и на блок управления двигателем на уменьшение подачи топлива и крутящего момента на колесах.
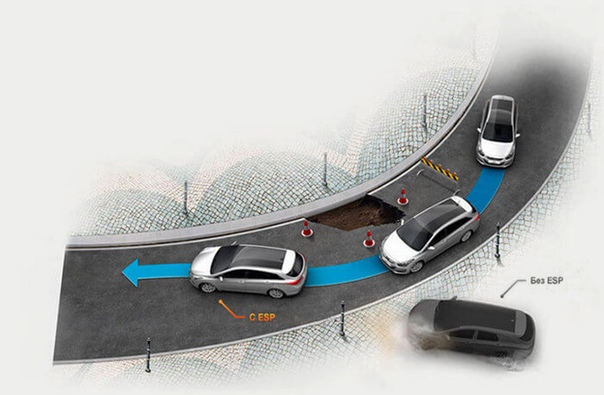
На рисунке можно посмотреть пример, в котором показан занос(разворот или вылет с дороги) – красная линия. В такой ситуации система ESP произведет торможение нужных колес и автомобиль останется устойчив при вхождении в поворот – зеленая линия.
Система контролирует автомобиль в любом режиме езды – набор скорости, торможение, движение накатом. Определение критической ситуации и включение электроники зависит от конкретного случая и типа привода автомобиля. К примеру, если датчик углового ускорения зафиксировал начало заноса задней оси, ESP даст команду на блок управления двигателем и подача топлива будет уменьшена. Далее, будет следовать команда на притормаживание внешнего переднего колеса и т.д., в соответствии с заложенной программой.
Если в автомобиле автоматическая КПП с электронным управлением, система может переключать передачи, подбирая оптимальный режим работы трансмиссии.
Есть ситуации, в которых такая система мешает. Но, это больше относится к экстремальной езде водителя, чем к самой ESP. Например, в случае выхода из заноса необходимо резко увеличить скорость, а система сделать это не дает, уменьшая обороты двигателя.
Однако, во многих автомобилях систему ESP можно, принудительно, отключить. В некоторых моделях система не реагирует на небольшие заносы и скольжения, добавляя больше адреналина водителю во время езды. При этом, в критической ситуации она мгновенно срабатывает.
В некоторых моделях система не реагирует на небольшие заносы и скольжения, добавляя больше адреналина водителю во время езды. При этом, в критической ситуации она мгновенно срабатывает.
Система ESP – одна из главных в общем комплексе активной безопасности автомобиля. Благодаря ей даже неопытный водитель сможет справиться с управлением в сложных ситуациях. Нужно просто поворачивать руль, а система сама проконтролирует безопасное вхождение в поворот. Главная особенность системы ESP — в большинстве случаев она предотвращает аварийные ситуации, с которыми водитель сам никогда не справится.
Но, не стоит забывать о том, что электроника не может на 100% обезопасить автомобиль от заносов. Есть законы физики, на которые не может распространяться действие ни одной системы безопасности автомобиля, в частности это касается и системы ESP. Она способна в значительной мере контролировать устойчивое поведение автомобиля на дороге, тем самым уменьшая шансы попадания в аварию. Однако, максимальных результатов ее работы можно добиться, только, при соблюдении правил дорожного движения или, хотя бы, адекватном вождении.
Как работает ЕСП (блок система ESP)
Электронная система стабилизации ESP (ЕСП) устанавливается на автомобили уже в течении 15 лет. В зависимости от производителя аббревиатура может быть различная: ESC, VSC, DSTC, VDC, DSC. Однако, независимо от названия, она имеет одно назначение: сохранять контроль в управлении автомобилем при осуществлении маневров на больших скоростях и на дорогах со скользким покрытием. Несмотря на сам факт существования этой системы, многие автолюбители имеют весьма слабое представление о том, как работает ЕСП (ESP). Причем одни говорят, что лишняя электроника им ни к чему, их вполне устраивает система ABS (хотя ESP рассматривается как расширенный вариант ABS), другие, наоборот, полностью доверяются системе, не вникая в принцип ее действия.
Для любознательных попробуем пролить свет на это довольно интересное электронное устройство. Систему контроля курсовой устойчивости (КСУ) массово начали внедрять в конце 1990-х годов. Толчком для этого послужил скандальный случай, который произошел в истории компании Мерседес при испытании осенью 1997 года автомобиля Mercedes-Benz A-класс, без системы стабилизации. При прохождении так называемого лосиного теста, когда на большой скорости необходимо было объехать появившееся внезапно препятствие и вернуться на прежнюю полосу движения, машина потеряла управление и перевернулась. Именно после этого случая было решено снабжать автомобили системой электронной стабилизации. Вначале планировалось применять ее в машинах представительского и бизнес-класса, но со временем ESP и ее аналоги стали доступы и для бюджетных недорогих автомобилей.
Толчком для этого послужил скандальный случай, который произошел в истории компании Мерседес при испытании осенью 1997 года автомобиля Mercedes-Benz A-класс, без системы стабилизации. При прохождении так называемого лосиного теста, когда на большой скорости необходимо было объехать появившееся внезапно препятствие и вернуться на прежнюю полосу движения, машина потеряла управление и перевернулась. Именно после этого случая было решено снабжать автомобили системой электронной стабилизации. Вначале планировалось применять ее в машинах представительского и бизнес-класса, но со временем ESP и ее аналоги стали доступы и для бюджетных недорогих автомобилей.
Как же все-таки работает ЕСП? Конечная цель, поставленная перед электронной системой стабилизации (ESP) – в экстремальной ситуации удержать автомобиль в направлении движения передних колес. Конструктивно устройство выполнено из нескольких датчиков, предназначенных для контроля автомобиля в пространстве, блока с электронным управлением и насоса, управляющего раздельными тормозными системами каждого колеса. Последний также задействован для функционирования системы, предотвращающей блокировку колес ABS. Датчики, которые вмонтированы в каждое колесо, считывают угловые скорости колес с частотой 25 раз в секунду. Следующий датчик, расположенный на рулевой колонке, отслеживает угол повороту рулевого колеса. И, наконец, последний датчик ЕСП установлен максимально приближено к осевому центру автомобиля (Yaw sensor), выполнен конструктивно в виде гироскопа (в современных системах применяются акселерометры) и фиксирует вращение авто вокруг вертикальной оси.
Конструктивно устройство выполнено из нескольких датчиков, предназначенных для контроля автомобиля в пространстве, блока с электронным управлением и насоса, управляющего раздельными тормозными системами каждого колеса. Последний также задействован для функционирования системы, предотвращающей блокировку колес ABS. Датчики, которые вмонтированы в каждое колесо, считывают угловые скорости колес с частотой 25 раз в секунду. Следующий датчик, расположенный на рулевой колонке, отслеживает угол повороту рулевого колеса. И, наконец, последний датчик ЕСП установлен максимально приближено к осевому центру автомобиля (Yaw sensor), выполнен конструктивно в виде гироскопа (в современных системах применяются акселерометры) и фиксирует вращение авто вокруг вертикальной оси.
 Здесь нужно учесть, что сама система стабилизации не предупреждает безопасную траекторию движения, ее задача направлять машину в том направлении, куда повернут руль. При этом она делает то, что невозможно сделать физически: осуществляет независимое друг от друга торможение колес машины. Также ограничивается подача топлива, прекращая ускорение автомобиля, что позволяет его мгновенно стабилизировать.
Здесь нужно учесть, что сама система стабилизации не предупреждает безопасную траекторию движения, ее задача направлять машину в том направлении, куда повернут руль. При этом она делает то, что невозможно сделать физически: осуществляет независимое друг от друга торможение колес машины. Также ограничивается подача топлива, прекращая ускорение автомобиля, что позволяет его мгновенно стабилизировать.Существует два варианта, когда автомобиль отклоняется от намеченной траектории. Это занос – случай потери сцепления с дорогой с боковым скольжением задних колес и снос, когда при потере сцепления возникает боковое скольжение передних колес. Угроза заноса часто возникает при выходе из поворота на автомобилях с задним приводом при резком нажатии на педаль газа. В этом случае задние колеса начинают проскальзывать и двигаться в наружную сторону поворота. В данном положении система КСУ затормаживает внешнее переднее колесо и занос прекращается. Снос происходит при выполнении маневра на большой скорости в момент потери сцепления передних колес с дорогой, в результате чего машина не реагирует на вращение рулевого колеса и далее продолжает движение по прямой.
В некоторых случаях возможно применение динамической стабилизации автомобиля при торможении не только одного колеса. На практике используется остановка двух и даже трех колес одновременно, кроме внешнего переднего.
Для автолюбителей, которые считают, что данная система мешает движению, наглядным примером, опровергающим такое мнение, служит простейший эксперимент, проведенный на ледовой трассе. При движении по такой дороге у среднестатистического водителя шанс вылететь с трассы без системы стабилизации увеличится, не говоря уже о том, что о лучшем времени пробега он может только мечтать. Больше всего недоверия к системе ЕСП возникает у водителей, которые не хотят понять простой истины: электронная система стабилизации пытается направить автомобиль в том направлении, куда повернуты колеса.
Здесь, конечно, система стабилизации будет помехой, не позволяющей использовать управляемый занос для поворота, а ограниченная подача топлива не позволит быстро набирать скорость при боковых скольжениях.ESP также может сыграть злую шутку с владельцами кроссоверов при очередном покорении трудно проходимого участка пересеченной местности или дороги без асфальтового покрытия (в самый ответственный момент, когда необходимо вращение колес, дабы зацепиться хоть за что-нибудь, система стабилизации, наоборот, тормозит и перекрывает подачу топлива). Так что при необходимости ESP можно, а в некоторых случаях и необходимо отключать. Только не стоит этого делать неопытным водителям, или если автовладелец собирается выезжать на загородную дорогу, где планирует двигаться с высокой скоростью.
Однако чтобы в совершенстве овладеть навыками управления автомобиля на скользкой дороге, нужно учиться вождению с выключенной системой стабилизации. Только в этом случае вы правильно сможете определить момент начала заноса или сноса, и правильно выбирать скорость для выполнения маневра.
 Если производитель не предусмотрел отключения системы в автономном режиме, то, как вариант, можно отключить один из датчиков скорости с одного из колес или убрать предохранитель насоса ABS. Но при этом не стоит забывать, что будет отключена антиблокировочная система тормозов.
Если производитель не предусмотрел отключения системы в автономном режиме, то, как вариант, можно отключить один из датчиков скорости с одного из колес или убрать предохранитель насоса ABS. Но при этом не стоит забывать, что будет отключена антиблокировочная система тормозов.Система курсовой устойчивости — что это такое? Установка и работа системы курсовой устойчивости
В современных автомобилях имеется множество различных систем, которые предназначены для улучшения безопасности на дороге. Одна из них – это ESP, или система курсовой устойчивости. Что это такое, знает далеко не каждый водитель. Давайте разберемся, что скрывается под этими буквами и какие преимущества этот комплекс дает водителю автомобиля. Читаем!
Характеристика
Система разрабатывалась на основе АБС. С одной стороны, это комплекс, который соединен с АБС, но основная часть системы все-таки уникальна. В данном случае речь идет о сенсоре, отвечающим за угол поворота рулевого колеса.
Как действует?
Электронная система курсовой устойчивости ESP необходима для устранения аварийных ситуаций, когда человек за рулем практически теряет управление. Чаще всего датчики и электроника предугадывают, когда водитель рискует попасть в трудную ситуацию, и стабилизируют положение автомобиля за счет подтормаживания отдельных колес. Например, в момент вхождения в поворот на высокой скорости диски начнут смещаться со своей обычной траектории. В данный момент сработает ESP (система стабилизации курсовой устойчивости). Она активирует колодки и, слегка притормаживая, поможет машине вновь встать на безопасный курс. При этом человек за рулем сможет не терять контроль за машиной. Главное, что ESP (если ее не отключать намеренно) работает в любой момент времени и независимо от скоростей или оборотов коленчатого вала в критическую секунду.
При этом человек за рулем сможет не терять контроль за машиной. Главное, что ESP (если ее не отключать намеренно) работает в любой момент времени и независимо от скоростей или оборотов коленчатого вала в критическую секунду.
 Сегодня система курсовой устойчивости VSC, EPS или DSC способна функционировать в любых условиях. Но разработчики вынуждены постоянно вносить изменения в алгоритмы.
Сегодня система курсовой устойчивости VSC, EPS или DSC способна функционировать в любых условиях. Но разработчики вынуждены постоянно вносить изменения в алгоритмы.Из истории ESP
Самый первый комплекс-помощник, который был призван следить за траекторией машины, — «Устройство управления», разработанное и запатентованное в «Даимлер-Бенц». Но по причине возможностей того времени, реализовать систему автоматичной корректировки курса авто так и не вышло.
Только в 94 году родилась первая действительно рабочая и эффективная система курсовой устойчивости. Что это такое, мы уже выяснили. По прошествии года после того, как был показан этот комплекс, его начали устанавливать на «Мерседес CL-600». А еще через два года ESP станет уже практически неотъемлемой частью электронного оснащения всех моделей «Мерседес», причем вне зависимости от комплектации.«ESP — в народ»
Сейчас все гораздо проще – такая система есть практически в любом автомобиле, даже в средней комплектации. А если все-таки системы стабилизации курсовой устойчивости в комплектации не оказалось, то многие автопроизводители предлагают ее в качестве опции. Правда, за это приходится немало доплачивать.
Правда, за это приходится немало доплачивать.
Как работает ESP
Современные СКУ связаны с ABS. Да и практически невозможно представить, как работает система курсовой устойчивости VSC без соединения с защитой от пробуксовки и без связи с ЭБУ. В этом комплексе задействованы одновременно многие ответственные узлы.
Устройство комплекса СКУ
Если представить устройство СКУ в виде структуры – это масса датчиков и контроллеров, позволяющих получать информацию о движении машины из ЭБУ, а затем по необходимости управлять двигателем и тормозами, чтобы вернуть автомобилю управляемость и устойчивость.
Для тех, кто не знает, как работает система курсовой устойчивости, наиболее важными являются всего два элемента. Это датчик угловой скорости и G-сенсор (или же акселерометр). Последний отвечает за замеры поперечного ускорения. Вышеперечисленные элементы связаны как между собой, так и с контролирующей электроникой. Когда машина скользит в бок, система определяет, опасно ли это. После анализа цифр данные попадают на блок ESP. Затем СКУ реагирует на параметры и либо активирует исполнительные устройства, либо ничего не делает. Очень хорошо знает, насколько сильно поворачивается рулевое колесо, на какой скорости едет машина, опасен ли занос и нужно ли запускать систему аварийного управления. Информация с датчиков поступает мгновенно.Важная особенность
Нужно рассмотреть еще одну особенность, которую имеет система курсовой устойчивости. Что это такое? За счет того, что система связана с главными датчиками в ходовой части машины, ESP способна сравнивать цифры с реальным поведением автомобиля.
То есть компьютер определяет, отличается ли поведение авто от расчетных цифр. Если параметры серьезно разнятся, то контролирующий блок выполнит корректировку цифры и вернет фактические данные в нормальные пределы. Это помогает избежать опасных ситуаций.
Это помогает избежать опасных ситуаций.Механизм работы ESP
Работа основана на управлении двигателем, рулевой и тормозной системой. Чтобы вернуть автомобиль на расчетный курс, система запустит процесс торможения на всех или отдельных колесах. СКУ умеет определять, на сколько нужно снизить обороты колес. При этом процесс торможения выполняется за счет нескольких систем. ABS меняет давление в тормозной системе, подача горючего в камеры сгорания снижается, следовательно, обороты на колесах тоже уменьшаются.
Когда ESP можно отключить
Иногда, когда нужно управлять машиной виртуозно, на сложных участках, система, которая в 95 % случаев помогает избежать страшных аварий, может сыграть с водителем-профессионалом злую шутку. Однако производители предусмотрели и этот момент. Сейчас даже при базовых ESP эту систему можно отключить в зависимости от ситуации. В некоторых автомобилях, оснащенных электронными помощниками, ESP может работать в различных режимах — полной и частичной безопасности.
Заключение
В целом СКУ – это уникальная система, которая спасла уже миллионы жизней. Однако обмануть физику не смог еще никто, и возможности электроники далеко не безграничны. А узнать, есть ли система курсовой устойчивости в автомобиле, можно в инструкции. Не стоит ее отключать при отсутствии большого опыта вождения. Особенно если это касается езды по заснеженной дороге.
Системы задней динамической стабилизации
Устройства этой категории лучше всего можно охарактеризовать как внутреннюю скобу, позволяющую контролировать движение пораженного сегмента позвоночника. Большинство этих устройств, как правило, происходит от конструкций транспедикулярных винтов и стержней (используемых в хирургии спондилодеза) 1980-х и 1990-х годов. Эти устройства были разработаны для обеспечения жесткой стабильности позвоночника, в то время как костная масса была достигнута. Цель устройств нового поколения — обеспечить возможность контролируемого движения таким образом, чтобы добиться более нормального движения позвоночника.
Эти устройства были разработаны для обеспечения жесткой стабильности позвоночника, в то время как костная масса была достигнута. Цель устройств нового поколения — обеспечить возможность контролируемого движения таким образом, чтобы добиться более нормального движения позвоночника.
Некоторые из этих устройств были одобрены для использования в качестве дополнения к спондилодезу и в настоящее время проходят испытания как отдельное устройство. Эти устройства обычно используются для лечения пациентов с симптоматическим спондилолистезом или дегенеративным заболеванием диска. Некоторые устройства также изучаются или будут изучаться как отдельные устройства (без слияния) и для лечения стеноза поясничного отдела позвоночника.
Вместо жестких винтов и жестких металлических стержней эта группа устройств имеет следующие комбинации компонентов:
- Винты и шнуры
- Винты, шнуры и распорки
- Винты и гибкие стержни
- Винты и стержни с подвижными частями
- Гибкие винты и гибкие стержни
- Винты и штанги надувные
объявление
Есть много устройств этого типа. Ниже представлен обзор различных типов динамических устройств на основе транспедикулярных винтов.
Ниже представлен обзор различных типов динамических устройств на основе транспедикулярных винтов.
Граф связки
Одним из первых устройств на основе транспедикулярных винтов была связка Graf. Эта система была разработана в Европе и использует плетеные полиэфирные кабели, обвитые петлей вокруг винтов для обеспечения устойчивости при движении. Было опубликовано несколько отчетов о клинических результатах этого устройства, но результаты были противоречивыми. 1 — 4 Различия в результатах могут быть связаны с различиями в группах пациентов, оперированных, и / или в используемых оценках результатов.Это устройство в настоящее время доступно только в Великобритании
.В этой статье:
реклама
Dynesys
Другая система с использованием, произведенная Zimmer Spine. Это устройство также имеет пластиковую прокладку над шнурами. Устройство использовалось в качестве устройства динамической стабилизации в Европе, и были получены смешанные результаты. 5 , 6 Система Dynesys — это система динамической стабилизации, получившая разрешение FDA США.
5 , 6 Система Dynesys — это система динамической стабилизации, получившая разрешение FDA США.
Разрешение FDA для системы Dynesys ограничено использованием в качестве дополнения к спондилодезу грудного, поясничного и крестцового отделов позвоночника при дегенеративном спондилолистезе с неврологическими нарушениями, а также при ранее неудачном спондилодезе (псевдоартрозе). При использовании в качестве системы фиксации транспедикулярного винта система Dynesys Spinal System показана для использования у пациентов, которым выполняется слияние поясничного или крестцового отдела позвоночника только с аутогенным трансплантатом, и которым удаляют устройство после образования твердой сращенной массы.
Продолжаются клинические испытания системы Dynesys в качестве автономного устройства при отсутствии спондилодеза.
Изобар
Некоторые устройства сохранили первоначальную концепцию металлических стержней, но разработали подвижное соединение внутри стержня. Одним из таких устройств является IsoBar, который производится компанией Scient’x во французском Гуйанкуре. На момент написания этой статьи опубликованных отчетов об использовании этого устройства не обнаружено. IsoBar используется в Европе.
Одним из таких устройств является IsoBar, который производится компанией Scient’x во французском Гуйанкуре. На момент написания этой статьи опубликованных отчетов об использовании этого устройства не обнаружено. IsoBar используется в Европе.
Система динамической мягкой стабилизации
Система динамической мягкой стабилизации использует анкеровку с помощью транспедикулярных винтов, а не традиционных прямых стержней, и включает в себя эллиптическую металлическую катушку, соединенную с винтами.Это устройство не одобрено для использования в США, но использовалось в других частях мира для предварительной оценки. Двенадцатимесячное наблюдение за 16 пациентами показало благоприятный исход со значительным уменьшением боли. 7
Stabilimax NZ
Система динамической стабилизации позвоночника Stabilimax NZ, изготовленная Applied Spine Technologies, Нью-Хейвен, Коннектикут, получила одобрение FDA в январе 2007 года для начала клинических испытаний в США.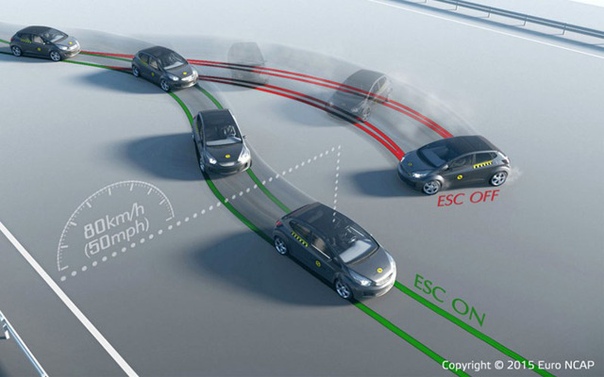 Stabilimax NZ будет сравниваться с традиционным спондилодезом для пациентов со стенозом поясничного отдела позвоночника.
Stabilimax NZ будет сравниваться с традиционным спондилодезом для пациентов со стенозом поясничного отдела позвоночника.
В дополнение к вышеописанным технологиям, многие другие устройства динамической стабилизации в настоящее время находятся на различных стадиях разработки. Кроме того, некоторые компании разрабатывают технологии, которые позволят сочетать устройства задней динамической стабилизации и полную замену диска в качестве альтернативы спондилодезу.
Ссылки
- 1.Madan S, Boeree NR. Результат операции лигаментопластики Графа по сравнению с передним межтеловым спондилодезом поясницы с подковообразной клеткой Хартсхилла.Eur Spine J. 2003; 12: 361-8.
- 2.Гревитт М.П., Гарднер А.Д., Спилсбери Дж. И др. Система стабилизации Graf: первые результаты у 50 пациентов. Eur Spine J. 1995; 4: 169-75.
- 3.Hadlow S, Fagan, AB, Glas H и др. Процедура лигаментопластики Графа: сравнение с заднебоковым спондилодезом при лечении боли в пояснице.
 Позвоночник. 1998; 23: 1172-9.
Позвоночник. 1998; 23: 1172-9. - 4. Ригби М.С., Селмон GPF, Фой Массачусетс, Фогг AJB. Стабилизация связки графа: средне- и долгосрочное наблюдение. Eur Spine J. 2001; 10: 234-6.
- 5.Stoll TM, Gilles Dubois G, Schwarzenbach O. Динамическая система нейтрализации позвоночника: многоцентровое исследование новой системы без слияния. Eur Spine J. 2002; 11 (Приложение 2): S170-8.
- 6. Гроб Д., Бенини А., Юнге А., Энн Ф, Маннион А.Ф. Клинический опыт использования системы полужесткой фиксации Dynesys для поясничного отдела позвоночника: хирургический и ориентированный на пациента результат в 50 случаях в среднем через 2 года. Позвоночник. 2005; 30: 324-31.
- 7.Сенгупта Д. Проспективное клиническое испытание мягкой стабилизации с помощью DSS (Dynamic Stabilization System).Общество по артропластике позвоночника. Май 2005 г .; Нью Йорк, Нью Йорк.
 Позвоночник. 1998; 23: 1172-9.
Позвоночник. 1998; 23: 1172-9.Динамическая стабилизация поясничного стеноза позвоночника с помощью системы динамической стабилизации позвоночника Stabilimax NZ® — Просмотр полного текста
Дегенеративное заболевание позвоночника — нормальная часть процесса старения. Эта дегенерация может иногда вызывать сильную боль и ограничивать нормальное движение.
Эта дегенерация может иногда вызывать сильную боль и ограничивать нормальное движение.
Боль может быть из многих источников. У пациентов, включенных в это исследование, боль была диагностирована в основном в результате состояния, называемого стенозом позвоночного канала.Текущий стандарт лечения стеноза позвоночника от умеренной до тяжелой степени — это хирургическая процедура, которая снижает давление на спинной мозг и нервы, и называется декомпрессионной хирургией. Хирург удаляет ткань и кость, вызывающие сужение, таким образом снимая защемление спинного мозга и нервных корешков. После операции у пациента может оказаться слишком нестабильный позвоночник. Другими словами, мышцы и связки позвоночника должны работать слишком много, чтобы поддерживать нормальную осанку и контролировать движения.В течение многих лет пациенты с нестабильной спиной получали фьюжн-терапию. Сращение — это развитие кости между позвонками для стабилизации позвоночника и предотвращения движения. Это делается путем введения костного трансплантата вокруг обрабатываемого позвонка и установки жесткого фиксатора, называемого устройством слияния, для предотвращения движения. В конце концов, между позвонком сформируется кость, и позвоночник «срастется».
В конце концов, между позвонком сформируется кость, и позвоночник «срастется».
В этом исследовании мы будем проводить исследование, чтобы оценить новое исследовательское медицинское устройство, которое предназначено для фиксации и поддержки позвоночника точно так же, как слияние, но без слияния в позвоночнике пациента.Устройства, которые делают это, называются «сохраняющими движение» или «динамически стабилизирующими» устройствами для позвоночника. Исследуемое устройство, которое оценивается в этом исследовании, называется системой динамической стабилизации позвоночника Stabilimax NZ®. Stabilimax NZ® вставляется и фиксируется на позвонке с помощью транспедикулярных винтов точно так же, как вставляется и прикрепляется спондилодез. Единственное отличие состоит в том, что для Stabilimax NZ® не будет размещаться костный трансплантат вокруг или между позвонками, чтобы способствовать росту кости для сращения.Пациенты, участвующие в исследовании, получат либо Stabilimax NZ®, либо процедуру слияния. Исследование представляет собой рандомизированное контролируемое клиническое исследование с использованием схемы рандомизации 2: 1 исследование: контроль. В исследовании примут участие 480 пациентов примерно в 20 исследовательских центрах США.
Исследование представляет собой рандомизированное контролируемое клиническое исследование с использованием схемы рандомизации 2: 1 исследование: контроль. В исследовании примут участие 480 пациентов примерно в 20 исследовательских центрах США.
PPT — Недорогая схема динамической стабилизации напряжения для автономной ветроиндукционной генераторной системы Презентация в PowerPoint
Недорогая схема динамической стабилизации напряжения для автономной ветроиндукционной системы Автор: Dr.А.М. Шараф, старший член IEEE; и Лян Чжао, студент
Схема • 1.Введение • 2.Автономная ветроэнергетическая система • 3.Компенсация переключаемого конденсатора динамической серии, включая две части: модели цифрового моделирования и результаты динамического моделирования • 4. Выводы • 5.Будущее Исследование • Ссылка
1. Введение • Энергия ветра стала одним из наиболее важных альтернативных источников энергии. • Большинство ветряных турбин (15-200 кВт) используют трехфазный асинхронный индукционный генератор из-за его низких потерь, надежности и меньших затрат на техническое обслуживание.• Однако стабильность напряжения ветроиндукционной системы генератора полностью зависит от порывов ветра и изменений электрической нагрузки [1-3]. • Требуются новые интерфейсные технологии, такие как DSSC и другие схемы компенсации [1-3].
DSSC — это недорогой динамический последовательный переключаемый конденсатор (DSSC) , схема компенсации интерфейса. Емкости параллельно или последовательно схемы DSSC сопрягаются с выходными фидерными линиями. Схема DSSC может использоваться для повышения стабильности напряжения индукционного генератора и обеспечения динамической стабилизации напряжения при изменяющихся условиях ветра и нагрузки, тем самым предотвращая потерю серьезных скачков напряжения на шине генератора.Введение Что такое DSSC?
2. Автономная ветроэнергетическая система На рисунке 1 показана схема автономного преобразования ветровой энергии с гибридной нагрузкой и динамическими последовательными компенсациями переключаемых конденсаторов
Автономная ветроэнергетическая система На рисунке 1 показана схема автономного преобразования ветровой энергии с гибридной нагрузкой и динамическими последовательными компенсациями переключаемых конденсаторов
2. Автономная ветроэнергетическая система На рисунке 2 показана недорогая динамическая переключаемая серия Схема стабилизации конденсатора (DSSC) с использованием переключающего устройства выключения затвора GTO
2. Автономная ветроэнергетическая система На рисунке 3 показана гибридная электрическая нагрузка
3.Компенсация переключаемых конденсаторов динамической серии 3.1 Имитационные модели Digital • Образец тестовой автономной ветроиндукционной системы (WECS) моделируется с использованием программной среды Matlab / Simulink / SimPower Blockset.
3. Компенсация коммутируемого конденсатора динамической серии 3.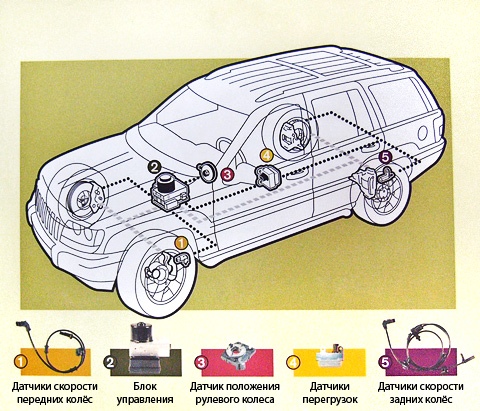 1 Модели цифрового моделирования На рисунке 4 показана функциональная модель Unified Systems Matlab / Simulink
1 Модели цифрового моделирования На рисунке 4 показана функциональная модель Unified Systems Matlab / Simulink
3. Компенсация коммутируемого конденсатора динамической серии3.1 Цифровая имитационная модель На Рисунке 5 показана схема переключения ШИМ с ПИД-управлением с трехконтурным управлением ошибками
3. Динамическая последовательная компенсация переключаемого конденсатора 3.2 Динамические результаты моделирования Линейные и нелинейные колебания нагрузки На рисунке 6 на следующем слайде изображена цифровое моделирование динамического отклика как на линейную, так и на нелинейную нагрузку. • В интервале времени от 0,1 до 0,3 с мы приложили 50% (100 кВА) линейную нагрузку; от 0,4 до 0,6 с была приложена нелинейная нагрузка 60% (120 кВА).• Таким образом, DSSC может стабилизировать как линейные, так и нелинейные скачки нагрузки и обеспечить стабилизацию шины генератора
Без компенсации DSSC С компенсацией DSSC 3. Компенсация переключаемого конденсатора динамической серии 3.2 Рисунок 6
Компенсация переключаемого конденсатора динамической серии 3.2 Рисунок 6
3. Компенсация переключаемого конденсатора динамической серии 3.2 Результаты динамического моделирования При скачке нагрузки асинхронного двигателя На рис. 7 на следующем слайде показан отклик динамического моделирования на скачки нагрузки асинхронного двигателя.• В период от 0,2 до 0,4 с мы применили нагрузку асинхронного двигателя около 20% (20 кВА). • Из рисунка видно, что DSSC не компенсировал должным образом скачки нагрузки двигателя. 8 на следующем слайде показан отклик динамического моделирования на ветровые отклонения • От 0.3–0,6 с, скорость ветра была снижена до 6 м / с с начального значения 10 м / с. • Из рисунка 8 видно, что DSSC действительно компенсировал отклонение от ветра, напряжение на шине генерации остается равным 1.0pu.
Без компенсации DSSC С компенсацией DSSC 3. Компенсация переключаемого конденсатора динамической серии 3. 2 Результаты динамического моделирования Рисунок 8
2 Результаты динамического моделирования Рисунок 8
4. Выводы • Недорогая схема компенсации DSSC очень эффективна для стабилизации напряжения в линейные, нелинейные отклонения от пассивной нагрузки, а также отклонения от скорости ветра • Но он не может адекватно компенсировать большие броски динамических отклонений, таких как асинхронный двигатель.• Предлагаемая недорогая схема компенсации напряжения DSSC подходит только для изолированных систем преобразования энергии ветра, питающих линейные и нелинейные нагрузки пассивного типа
5. Дальнейшее исследование • Еще одна новая схема компенсации, которая может компенсировать большой бросок пускового тока. моторные экскурсии будут изучены в моих будущих исследованиях. • Эта схема будет очень эффективной для стабилизации напряжения на шине при линейных, нелинейных, бросковых скачках двигателя и ветровых экскурсиях.
Ссылка • [1]. К. Натараджан, А. М. Шараф, С. Сивакумаранд и С. Нагнархан, «Моделирование и управление схемой преобразования энергии ветра с использованием самовозбужденного индукционного генератора», IEEE Trans. On E.C., том 2, стр. 506-512, сентябрь 1987 г. • [2]. С.П. Сингх, Бхим Сингх и М.П. Джайн, «Рабочие характеристики и оптимальное использование машины с клеткой в качестве индукционного генератора с конденсаторным возбуждением», IEEE Trans. На E.C., Vol. 5, No. 4, pp.679-685, Dec.1990 • [3]. А.Гастли, М.А. Ахерраз, М. Гаммал, “Моделирование на основе Matlab / Simulink / ИНС автономного индукционного генератора с самовозбуждением”, Proc. Международной конференции по коммуникациям, компьютерам и электропитанию, ICCCP’98, 7-10 декабря 1998 г., Маскат, Султанат Оман, стр.93-98
К. Натараджан, А. М. Шараф, С. Сивакумаранд и С. Нагнархан, «Моделирование и управление схемой преобразования энергии ветра с использованием самовозбужденного индукционного генератора», IEEE Trans. On E.C., том 2, стр. 506-512, сентябрь 1987 г. • [2]. С.П. Сингх, Бхим Сингх и М.П. Джайн, «Рабочие характеристики и оптимальное использование машины с клеткой в качестве индукционного генератора с конденсаторным возбуждением», IEEE Trans. На E.C., Vol. 5, No. 4, pp.679-685, Dec.1990 • [3]. А.Гастли, М.А. Ахерраз, М. Гаммал, “Моделирование на основе Matlab / Simulink / ИНС автономного индукционного генератора с самовозбуждением”, Proc. Международной конференции по коммуникациям, компьютерам и электропитанию, ICCCP’98, 7-10 декабря 1998 г., Маскат, Султанат Оман, стр.93-98
Системные характеристики инерционно стабилизированной карданной платформы с трением, резонансом и Влияние вибрации
В ходе исследовательской работы оценивается качество датчика для выполнения измерений и документируется его влияние на производительность системы. Он также оценивает, изменяется ли эта производительность из-за окружающей среды и других параметров системы. Эти среды и параметры включают вибрацию, трение в системе, структурный резонанс и вход динамической системы. Анализ выполняется путем моделирования системы камеры на подвесе, для стабилизации которой требуются угловые измерения от инерциальных датчиков и гироскопов. В целом, моделирование включает модели для четырех разных типов гироскопов, системы карданной камеры, приводного двигателя, системы управления скоростью вращения и системы управления угловым положением.Анализируются модели трения, структурного резонанса и вибрации соответственно. Система моделируется для идеальной системы, а затем включает более реалистичные параметры окружающей среды и системы. Эти симуляции выполняются с каждым из четырех типов гироскопов. Анализ производительности показывает это для идеальной системы; повышение качества гироскопа обеспечивает лучшую производительность системы. Однако когда вводятся параметры окружающей среды и системы, дело обстоит иначе.
Он также оценивает, изменяется ли эта производительность из-за окружающей среды и других параметров системы. Эти среды и параметры включают вибрацию, трение в системе, структурный резонанс и вход динамической системы. Анализ выполняется путем моделирования системы камеры на подвесе, для стабилизации которой требуются угловые измерения от инерциальных датчиков и гироскопов. В целом, моделирование включает модели для четырех разных типов гироскопов, системы карданной камеры, приводного двигателя, системы управления скоростью вращения и системы управления угловым положением.Анализируются модели трения, структурного резонанса и вибрации соответственно. Система моделируется для идеальной системы, а затем включает более реалистичные параметры окружающей среды и системы. Эти симуляции выполняются с каждым из четырех типов гироскопов. Анализ производительности показывает это для идеальной системы; повышение качества гироскопа обеспечивает лучшую производительность системы. Однако когда вводятся параметры окружающей среды и системы, дело обстоит иначе. Бывают даже случаи, когда датчики более низкого качества обеспечивают лучшую производительность, чем датчики более высокого качества.
Бывают даже случаи, когда датчики более низкого качества обеспечивают лучшую производительность, чем датчики более высокого качества.
1. Введение
Платформы с инерционной стабилизацией (ISP) используются для прицеливания и стабилизации множества различных инструментов. Сюда могут входить инфракрасные и оптические камеры, используемые для гражданских или военных приложений, включая отслеживание цели, наведение телескопа и захват изображения, при котором линия прямой видимости (LOS) инструмента должна быть устойчивой и направленной в желаемое место [1–6]. Это становится еще более важным, если инструмент установлен на движущейся базе, такой как наземное транспортное средство, самолет, вертолет или движущееся судно, в условиях вибрации окружающей среды.Инерциальные измерительные блоки (IMU), состоящие из акселерометров и гироскопов скорости, могут использоваться для измерения ускорения и углового перемещения как основания, так и стабилизированной платформы, чтобы компенсировать внешние возмущения и стабилизировать соответствующий прибор, чтобы удерживать LOS [1 –6]. Способность стабилизировать систему и удерживать ее LOS зависит от многих факторов, включая, помимо прочего, используемые алгоритмы управления, настройки усиления этих алгоритмов и качество датчика, обеспечивающего измерения, используемые для управления LOS.Но определить, какое качество сенсора необходимо для конкретного приложения, не всегда просто. Хотя повышенное качество сенсора должно повысить качество работы системы, это не всегда так. В зависимости от динамической среды системы качество работы системы может меняться для данного датчика. Могут быть случаи, когда датчик более низкого качества может обеспечивать такую же производительность или даже превосходить датчики более высокого качества.
Способность стабилизировать систему и удерживать ее LOS зависит от многих факторов, включая, помимо прочего, используемые алгоритмы управления, настройки усиления этих алгоритмов и качество датчика, обеспечивающего измерения, используемые для управления LOS.Но определить, какое качество сенсора необходимо для конкретного приложения, не всегда просто. Хотя повышенное качество сенсора должно повысить качество работы системы, это не всегда так. В зависимости от динамической среды системы качество работы системы может меняться для данного датчика. Могут быть случаи, когда датчик более низкого качества может обеспечивать такую же производительность или даже превосходить датчики более высокого качества.
Любая система ISP включает в себя интеграцию сложной аппаратуры; модель также должна учитывать внутренние вибрации электромеханической системы и внешние возмущения окружающей среды, которые могут стать сложными для моделирования.Разработанная модель ISP демонстрирует всю динамику системы для оценки производительности четырех различных типов датчиков в различных условиях тестирования. Модель системы включает в себя модель гироскопа, модель подвеса, управление двигателем и подсистемы управления углом внешнего контура. Исследование в основном сосредоточено на разработке аналитической модели ISP как функции момента инерции, привода двигателя и характеристик гироскопа для измерения возмущений в целях стабилизации и отслеживания. Моделирование системы управления подвесом, двигателем и с обратной связью поддерживает LOS для отслеживания [7, 8].
Модель системы включает в себя модель гироскопа, модель подвеса, управление двигателем и подсистемы управления углом внешнего контура. Исследование в основном сосредоточено на разработке аналитической модели ISP как функции момента инерции, привода двигателя и характеристик гироскопа для измерения возмущений в целях стабилизации и отслеживания. Моделирование системы управления подвесом, двигателем и с обратной связью поддерживает LOS для отслеживания [7, 8].
Чтобы исследовать производительность этой системы на основе выбора датчика без выполнения аппаратных тестов, моделируется и моделируется система ISP, которая требует измерений инерционного датчика для стабилизации. Моделирование и имитация проводятся с использованием четырех инерциальных датчиков различного качества для сравнения производительности. Модель, включающая трение и структурный резонанс, подвергается различным уровням вибрации окружающей среды, чтобы определить, изменяется ли производительность, обеспечиваемая каждым качеством датчика, в зависимости от состояния системы.
В данной работе смоделированная система представляет собой подвесную камеру, которая устанавливается на днище вертолета. Полная система состоит из кардана и приводного двигателя, а также моделей для гироскопических датчиков скорости. Кроме того, контур управления частотой вращения двигателя и контур управления угловым позиционированием предназначены для получения характеристик, необходимых для приложений управления LOS. После завершения проектирования системы управления моделируется замкнутая система, постепенно добавляя трение, структурный резонанс, вибрацию окружающей среды и ввод динамических команд, чтобы имитировать подавление базового движения, чтобы сравнить характеристики системы на основе выбора скорости гироскопа для данные условия.
Уникальный вклад исследования заключается в разработке системы ISP и контроллера PI 2 с использованием подхода PID-I и его применения для обеспечения стабильности системы. Вибрация, трение, резонанс и другие возмущающие эффекты включены для создания критериев эффективности для стабилизации платформы. Оцениваются и представлены результаты моделирования четырех различных типов коммерчески используемых гироскопических датчиков. Подробные характеристики датчиков, включая уровни шума и джиттера, описаны в заключительном разделе.Это исследование подтверждает необходимость моделирования и моделирования характеристик датчика, чтобы гарантировать правильный выбор датчика для желаемого применения.
Оцениваются и представлены результаты моделирования четырех различных типов коммерчески используемых гироскопических датчиков. Подробные характеристики датчиков, включая уровни шума и джиттера, описаны в заключительном разделе.Это исследование подтверждает необходимость моделирования и моделирования характеристик датчика, чтобы гарантировать правильный выбор датчика для желаемого применения.
2. Модель системы ISP
Обзор конструкции системы описан в этом разделе, соответствующем блок-схеме системы, показанной на рисунке 1.
Представленная система представляет собой камеру на подвесе, используемую для направления на изображение и поддержания желаемый LOS. Команда угла генерируется как системный вход. Эта угловая команда может быть результатом алгоритма отслеживания изображения, отмены базового движения или из других источников [1–6].Эта работа не сосредотачивается на генерации команды угла, но анализирует производительность системы по сравнению с желаемым углом. Для наведения системы подвеса на желаемый угол разработан регулятор угла. Он сравнивает ввод команды угла с измеренным углом, и эта ошибка LOS используется для генерации команд скорости вращения двигателя для поворота камеры в нужном направлении и устранения ошибки LOS.
Для наведения системы подвеса на желаемый угол разработан регулятор угла. Он сравнивает ввод команды угла с измеренным углом, и эта ошибка LOS используется для генерации команд скорости вращения двигателя для поворота камеры в нужном направлении и устранения ошибки LOS.
Контроллер двигателя предназначен для сравнения заданной скорости двигателя с измеренной скоростью и вывода напряжения двигателя для достижения желаемой производительности двигателя.Этот контроллер скорости вращения двигателя также помогает устранить ошибку из-за возмущений, таких как трение и вибрация, которые объясняются позже в разделе 7.
Выходные скорости вращения подвеса камеры и двигателя с прямым приводом измеряются гироскопом скорости для определения угловой скорости. для сравнения регулятором скорости. Эта измеренная скорость также интегрируется для расчета измеренного углового положения подвесной системы для сравнения с командой ввода угла. Оценка влияния ошибки измерения скорости, связанной с качеством датчика, на характеристики ошибки LOS — основная цель, которая имеет большое значение для многих реальных приложений проектирования.
3. Гироскопическое моделирование
Основная цель — оценить производительность системы на основе выбора датчика; поэтому сначала моделируется датчик. В то время как IMU состоят из акселерометров и гироскопов, выполняемое моделирование LOS зависит только от углового положения подвесной системы и, следовательно, является единственной частью моделируемого инерционного датчика.
3.1. Базовое моделирование гироскопа
Гироскопы скорости — это инструменты для измерения угловой скорости, с которой они вращаются.Хотя существует много различных типов гироскопов [1, 2], их характеристики можно моделировать аналогичным образом.
Первым показателем производительности для моделирования является частотная характеристика или полоса пропускания гироскопа. Частотная характеристика моделируется как система второго порядка. Общий вид используемой передаточной функции гироскопа, показан в (1), где ширина полосы гироскопа, используется для определения собственной частоты модели второго порядка,
.