Педаль газа.
- Форум
- Форум по моделям
- Skoda Octavia A7 FL
- Педаль газа.
4Likes
-
26.08.2019, 09:31 #1
Педаль газа.
Сегодня обнаружил следущее. При нажатии педали газа в пол, педаль проваливается дальше как при кикдауне. Коробка механическая. Подскажите в чём причина?
Ответить с цитированием
-
-
26.08.2019, 10:31 #2
Ну видимо «в пол» это и есть кикдаун? Или куда «дальше проваливается», дальше пола чтоль? Непонятно написано
Ответить с цитированием
-
26.
 08.2019, 11:00
#3
08.2019, 11:00
#3
При нажатии происходит характерное проваливание как на АКПП
Ответить с цитированием
-
26.08.2019, 11:02 #4
Так педаль электронная, тринсмиссия не при чем
Ответить с цитированием
-
26.08.2019, 11:27 #5
Я знаю. Я имею ввиду когда нажимаешь до упора, потом еще сильнее, происходит характерное ещё одно вдавливание как будто кнопка под педалью.
Ответить с цитированием
-
26.08.2019, 11:31 #6
Ну на АКПП тебя это не смущало, так?
Ответить с цитированием
-
26.08.2019, 11:50 #7
На АКПП везде есть, на механике такого не встречал. Хочу узнать может такое быть на МКПП или чтото с педалью нетак.
Ответить с цитированием
-
26.
08.2019, 11:56
#8
Сообщение от Владимир999
Я знаю. Я имею ввиду когда нажимаешь до упора, потом еще сильнее, происходит характерное ещё одно вдавливание как будто кнопка под педалью.
да, есть такое, тоже удивился.Ответить с цитированием
-
26.08.2019, 11:58 #9
На этих машинах датчики по педали газа используются не только для того, чтобы АКПП команду дать скинуть передачу. Не обращал внимания, что при выходе на обгон в сырую погоду, когда дворники в авторежиме, они в самый нужный момент переходят на самую быструю скорость? В этот момент газ и выжимается «в пол».
Или, если педаль газа отпустить достаточно резко, то тормоза дубеют и хватают прям сразу? Не удивлюсь, если сами педали и их начинка одинаковы у машин с АКПП и механикой
Ответить с цитированием
-
26.08.2019, 12:41 #10
Я тоже подумал что механизм педали одинаковый, только КПП разные ставят.
Ответить с цитированием
 08.2019, 11:00
#3
08.2019, 11:00
#3

 08.2019, 11:56
#8
08.2019, 11:56
#8
 Или, если педаль газа отпустить достаточно резко, то тормоза дубеют и хватают прям сразу? Не удивлюсь, если сами педали и их начинка одинаковы у машин с АКПП и механикой
Или, если педаль газа отпустить достаточно резко, то тормоза дубеют и хватают прям сразу? Не удивлюсь, если сами педали и их начинка одинаковы у машин с АКПП и механикой
« Октавия 4х4. Вибрации при повороте. | Тяжелый руль после небольшого дтп »
Ваши права
что это, когда пользоваться, зачем он нужен?
Некоторые водители, используя машину на автомате, задаются вопросом, когда видят там опцию кикдаун: что это, когда пользоваться, зачем он нужен.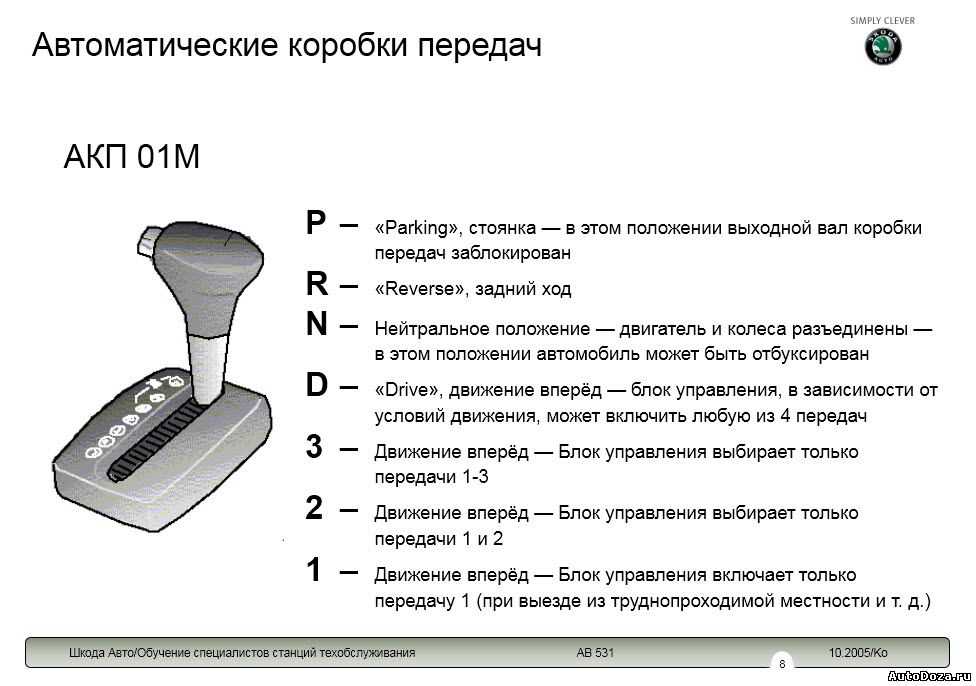 При этом, дилемма интересует не только новичков, опытных автолюбителей, пересевших с механики или вариатора. Далее будем разбираться в вопросе максимально подробно.
При этом, дилемма интересует не только новичков, опытных автолюбителей, пересевших с механики или вариатора. Далее будем разбираться в вопросе максимально подробно.
Содержание
- Что такое кикдаун
- Зачем нужен кикдаун
- Как это работает
- Вредит ли кикдаун автомобилю
- Видео
- Итог
Что такое кикдаун
Техническое описание режима звучит так. Кикдаун – это экстренный режим работы автомобиля, когда двигатель и автоматическая коробка передач переводится в положение, позволяющее выдать максимальный разгон. Просто говоря, при включении опции, машина начинает ускоряться на пределе своих возможностей.
Технология используется только на автоматических коробках передач. Также аналогичная разработка имеется и на вариаторе, механика же и вовсе не имеет ничего подобного. Здесь это технически невозможно применить.
Зачем нужен кикдаун
Подобная система требуется, когда водителю нужно максимально быстро ускорится, или набрать предельные обороты. Обычно это происходит в случаях:
Обычно это происходит в случаях:
- обгон на большой скорости;
- экстренное маневрирование или уход от столкновения;
- желание водителя прокатиться с «ветерком».
В любом случае опытные автолюбители не рекомендуют увлекаться «игрушкой» на мощных моторах. Бездумное применение режима может привести к заносу или ДТП.
Как это работает
Чтобы разобраться в работе устройства, следует подробно рассмотреть принцип действия механизма.
- Под педалью газа установлен специальный выключатель. Для его активации необходимо резко и до упора нажать на рычаг.
- Далее включается соответствующий модуль. Блок передает сигнал на мотор и АКПП.
- После получения импульса, коробка передач сбрасывается на 1-2 позиции вниз, а силовая установка начинает быстро набирать обороты. Процесс происходит практически незаметно. Если все работает корректно, водитель просто почувствует интенсивное ускорение.
- Чтобы отключить функцию, достаточно убрать ногу с педали газа.

При этом, происходит максимально быстрое ускорение, на которое способен автомобиль.
По сути, подобное можно сделать и на механике, с тем отличием, что процесс понижения передачи осуществляется вручную. С технической же стороны, различия отсутствуют.
Вредит ли кикдаун автомобилю
Как указывают производители, режим нужно включать ежедневно. Это исключит вероятность закисания клапана или его зависания в одном положении. С другой стороны, водители побаиваются часто использовать опцию, списывая страхи на повышенный износ поршневой группы и деталей коробки передач.
Но здесь следует подметить, если сами изготовители рекомендуют не забывать о возможности, значит, никакого вреда она не принесет. Больше навредит механизмам использование низкокачественных смазочных материалов и отсутствие сервисного обслуживания.
Видео
Вернуться на главную
Итог
Разобравшись в понятии кикдаун, что это, когда пользоваться, зачем он нужен, автолюбитель может смело пользоваться функцией. Опытные автолюбители рекомендуют не «играться» с модулем, все действия следует выполнять осознанно и при понимании вероятных последствий.
Опытные автолюбители рекомендуют не «играться» с модулем, все действия следует выполнять осознанно и при понимании вероятных последствий.
Понравилась статья? Поделиться с друзьями:
Управление Kickdown для автоматической коробки передач автомобиля с двухступенчатым режимом Kickdown (Патент)
Управление Kickdown для автоматической коробки передач автомобиля с двухступенчатым режимом Kickdown (Патент) | ОСТИ.GOV перейти к основному содержанию- Полная запись
- Другое связанное исследование
Этот патент описывает автоматическую коробку передач транспортного средства. Эта трансмиссия состоит из гидравлического преобразователя крутящего момента, передаточного механизма, соединенного с преобразователем крутящего момента, и имеет не менее трех ступеней редуктора с различными передаточными числами для движения вперед, трения для выбора одной из ступеней редуктора. Управление кик-дауном, состоящее из схемы первого переключения на пониженную передачу для управления трением, так что механизм трансмиссии переключается со ступени высокой передачи на ступень низшей передачи. Соленоид пониженной передачи предусмотрен в первой схеме пониженной передачи для управления первой схемой пониженной передачи, а переключатель пониженной передачи приспособлен для приведения в действие элементом управления двигателем. Когда элемент управления двигателем перемещается по существу в положение полной мощности, чтобы таким образом управлять соленоидом пониженной передачи, происходит переключение с более высокой передачи на более низкую ступень передачи.
Управление кик-дауном, состоящее из схемы первого переключения на пониженную передачу для управления трением, так что механизм трансмиссии переключается со ступени высокой передачи на ступень низшей передачи. Соленоид пониженной передачи предусмотрен в первой схеме пониженной передачи для управления первой схемой пониженной передачи, а переключатель пониженной передачи приспособлен для приведения в действие элементом управления двигателем. Когда элемент управления двигателем перемещается по существу в положение полной мощности, чтобы таким образом управлять соленоидом пониженной передачи, происходит переключение с более высокой передачи на более низкую ступень передачи.
- Изобретатели:
- Хигаси, Х; Ваки, К; Фукуири, М; Юкитомо, К.

- Дата публикации:
- Идентификатор ОСТИ:
- 5910027
- Номер(а) патента:
- США 4569253
- Правопреемник:
- Mazda Motor Corp., Хиросима
- Тип ресурса:
- Патент
- Отношение ресурсов:
- Дата подачи патентного файла: Дата подачи 28 сентября 1984 г.
- Страна публикации:
- США
- Язык:
- Английский
- Тема:
- 33 УСОВЕРШЕНСТВОВАННЫЕ ДВИГАТЕЛИ; МЕХАНИЧЕСКИЕ ТРАНСМИССИИ; СИСТЕМЫ КОНТРОЛЯ; ДИЗАЙН; ТРАНСПОРТНЫЕ СРЕДСТВА; ЭЛЕКТРОННЫЕ ЦЕПИ; ТРЕНИЕ; МЕХАНИЗМЫ; ГИДРАВЛИЧЕСКИЕ УСТРОЙСТВА УПРАВЛЕНИЯ; ПОЗИЦИОНИРОВАНИЕ; СОЛЕНОИДЫ; КРУТЯЩИЙ МОМЕНТ; КОНТРОЛЬНОЕ ОБОРУДОВАНИЕ; ЭЛЕКТРИЧЕСКИЕ КАТУШКИ; ЭЛЕКТРООБОРУДОВАНИЕ; ОБОРУДОВАНИЕ; ЧАСТИ МАШИН; 330602 * — Факторы конструкции автомобиля — соответствие двигателя и трансмиссии
Форматы цитирования
- MLA
- АПА
- Чикаго
- БибТекс
Хигаси Х. , Ваки К., Фукуири М. и Юкитомо К. Управление Kickdown для автоматической коробки передач автомобиля с двухступенчатым режимом Kickdown . США: Н. П., 1986.
Веб.
, Ваки К., Фукуири М. и Юкитомо К. Управление Kickdown для автоматической коробки передач автомобиля с двухступенчатым режимом Kickdown . США: Н. П., 1986.
Веб.
Копировать в буфер обмена
Higashi, H, Waki, K, Fukuiri, M, & Yukitomo, K. Управление Kickdown для автоматической коробки передач автомобиля с двухступенчатым Kickdown . Соединенные Штаты.
Копировать в буфер обмена
Хигаси, Х., Ваки, К., Фукуири, М., и Юкитомо, К. 1986.
«Управление кикдауном для автоматической коробки передач автомобиля с двухступенчатым кикдауном». Соединенные Штаты.
Копировать в буфер обмена
@статья{osti_5910027,
title = {Контроль Kickdown для автоматической коробки передач автомобиля с двухступенчатым режимом Kickdown},  , и Фукуири, М., и Юкитомо, К.},
, и Фукуири, М., и Юкитомо, К.},
abstractNote = {Этот патент описывает автоматическую коробку передач транспортного средства. Эта трансмиссия состоит из гидравлического преобразователя крутящего момента, передаточного механизма, соединенного с преобразователем крутящего момента, и имеет не менее трех ступеней редуктора с различными передаточными числами для движения вперед, трением для выбора одной из ступеней редуктора. Управление кик-дауном, состоящее из схемы первого переключения на пониженную передачу для управления трением, так что механизм трансмиссии переключается со ступени высокой передачи на ступень низшей передачи. Соленоид пониженной передачи предусмотрен в первой схеме пониженной передачи для управления первой схемой пониженной передачи, а переключатель пониженной передачи приспособлен для приведения в действие элементом управления двигателем. Когда элемент управления двигателем перемещается по существу в положение полной мощности, чтобы тем самым управлять соленоидом пониженной передачи, происходит переключение с высокой передачи на более низкую ступень передачи. },
},
дои = {},
URL-адрес = {https://www.osti.gov/biblio/5910027},
журнал = {},
номер =,
объем = ,
место = {США},
год = {1986},
месяц = {2}
}
Копировать в буфер обмена
Полный текст можно найти в Ведомстве США по патентам и товарным знакам.
Экспорт метаданных
Сохранить в моей библиотеке
Вы должны войти в систему или создать учетную запись, чтобы сохранять документы в своей библиотеке.
Аналогичных записей в сборниках OSTI.GOV:
- Аналогичные записи
Моделирование понижения дроссельной заслонки в автоматизированной механической трансмиссии
Изобретение в целом относится к способу работы электронного блока управления автоматизированной механической трансмиссии и, более конкретно, к способу, который имитирует и обеспечивает управляющий сигнал, указывающий понижение дроссельной заслонки.
Практически во всех транспортных средствах, оснащенных автоматической коробкой передач, нажатие водителем педали акселератора в пол интерпретируется либо механическими, либо электронными органами управления первичного двигателя и трансмиссии как «кик-даун» или «кик-даун» : желание увеличить скорость и мощность тягача и включить более низкую передачу, чтобы обогнать другое транспортное средство или подняться на подъем. В зависимости от типа транспортного средства и трансмиссии такие системы обычно включают в себя механические связи с топливной или другими системами двигателя и трансмиссией в случае полностью механических систем и датчики положения или переключатели, в которых управление двигателем и трансмиссией осуществляется с помощью электроники, т.е. , компьютерные и программные средства, например, в проводных системах.
В последнем случае переключатели, активируемые полностью или практически полностью нажатой педалью акселератора или дроссельной заслонки, могут выйти из строя, но, безусловно, требуют дополнительных материалов, проводки, проектирования и проектирования. Таким образом, отказ от датчика положения дроссельной заслонки означает снижение затрат на проектирование и компоненты, а также повышение надежности.
Таким образом, отказ от датчика положения дроссельной заслонки означает снижение затрат на проектирование и компоненты, а также повышение надежности.
Способ работы автоматизированной механической трансмиссии включает в себя датчик положения дроссельной заслонки и электронный блок управления, включая программное обеспечение, которое выдает смоделированный сигнал в ответ на различные положения полной дроссельной заслонки и ход. Различные временные и позиционные зависимые отношения воспринимаются датчиком положения дроссельной заслонки и интерпретируются как понижение дроссельной заслонки электронным блоком управления, который генерирует сигнал понижения. Например, в своей наименее сложной конфигурации обнаруженное перемещение превышает заданный порог в 90% или 95% полного хода педали газа интерпретируется как запрос на понижение передачи. Вторым критерием, который можно комбинировать с описанным выше подходом, является измерение скорости смещения (dT/dt) педали газа. Скорость смещения выше заданного порога в сочетании с 90-процентным или 95-процентным перемещением дроссельной заслонки вызовет команду кикдауна. Третьим критерием является то, удерживает ли педаль газа свое положение 90% или 95% (или больше) в течение заданного периода времени, т.е. 3, 5 или 10 секунд или дольше. Четвертый критерий заключается в том, была ли педаль газа отпущена таким образом, что она составляет менее 10% от полного хода, а затем удовлетворяет другим, перечисленным выше критериям.
Третьим критерием является то, удерживает ли педаль газа свое положение 90% или 95% (или больше) в течение заданного периода времени, т.е. 3, 5 или 10 секунд или дольше. Четвертый критерий заключается в том, была ли педаль газа отпущена таким образом, что она составляет менее 10% от полного хода, а затем удовлетворяет другим, перечисленным выше критериям.
Таким образом, целью настоящего изобретения является создание датчика положения дроссельной заслонки и программного обеспечения, которое путем предоставления выходных данных моделирует, когда водитель дает команду на понижение передачи.
Еще одной целью настоящего изобретения является создание датчика и программного обеспечения, которые имитируют команду водителя на понижение передачи без использования двухпозиционного полного хода, т. е. двухпозиционного датчика.
Еще одной целью настоящего изобретения является создание пропорционального датчика дроссельной заслонки и электронного блока управления, который подает сигнал пониженной передачи на соответствующее оборудование управления трансмиссией.
Еще одной целью настоящего изобретения является создание пропорционального датчика дроссельной заслонки и программного обеспечения, которое выдает сигнал пониженной передачи на соответствующее электронное оборудование в ответ на различные действия пониженной передачи со стороны оператора транспортного средства.
Дополнительные цели и преимущества настоящего изобретения станут очевидными при обращении к последующему описанию предпочтительного варианта осуществления и приложенным чертежам, на которых одинаковые ссылочные позиции относятся к одним и тем же компонентам, элементам или признакам.
РИС. 1 представляет собой схематический вид двигателя и трансмиссии обычного грузового автомобиля, иллюстрирующий различные органы управления и датчики;
РИС. 2 представляет собой составной рисунок, иллюстрирующий различную активность дроссельной заслонки и датчиков, которая может интерпретироваться водителем как запрос на понижение передачи; и
РИС. 3 представляет собой блок-схему программного обеспечения, включающего настоящее изобретение.
Обратимся теперь к фиг. 1 показан схематический вид комбинации грунтовки и автоматизированной механической трансмиссии, которая в целом обозначена ссылочной позицией 9.0169 10 . Комбинация первичного двигателя и автоматизированной трансмиссии 10 включает двигатель, такой как двигатель внутреннего сгорания, работающий на газе или дизельный двигатель 12 , который выборочно соединен через главную фрикционную муфту 14 с автоматизированной механической трансмиссией 16 . Автоматизированная механическая трансмиссия 16 обычно включает в себя делитель или двухдиапазонную коробку передач в головной или входной части трансмиссии 16 , трех- или четырехступенчатую коробку передач, приводимую в действие выходом делителя, и двухступенчатую планетарную передачу в сборе. который приводит в движение выходной вал 18 .
Комбинация 10 также включает микропроцессорный или электронный блок управления (ЭБУ) 20 , который получает сигналы и данные от различных органов управления и датчиков и управляет общей работой двигателя 12 , главного фрикциона 14 и различные секции коробки передач 16 . В частности, электронный блок управления 20 получает данные или данные от водителя через датчики 9.0169 22 , таких как состояние системы зажигания, должна ли коробка передач работать в автоматическом или ручном режиме, и в последнем случае подаются команды на повышение и понижение передачи. Кроме того, конкретный ввод данных от водителя обеспечивается педалью газа или акселератора 24 , которая соединена с линейным и пропорциональным или модулирующим датчиком положения дроссельной заслонки или датчиком 26 , который передает данные в реальном времени на электронный блок управления .20 относительно текущего положения педали акселератора 24 . Выход датчика 26 может представлять собой переменное напряжение, кодированный сигнал или любой другой поток данных, совместимый с электронным блоком 20 управления, который легко обнаруживается и считывается. Сигнал текущего положения от датчика положения дроссельной заслонки 26 также может быть дифференцирован в электронном блоке управления 20 для получения сигнала скорости движения, то есть производных сигналов dT/dt, то есть изменения положения акселератора или педаль газа 24 за единицу времени.
В частности, электронный блок управления 20 получает данные или данные от водителя через датчики 9.0169 22 , таких как состояние системы зажигания, должна ли коробка передач работать в автоматическом или ручном режиме, и в последнем случае подаются команды на повышение и понижение передачи. Кроме того, конкретный ввод данных от водителя обеспечивается педалью газа или акселератора 24 , которая соединена с линейным и пропорциональным или модулирующим датчиком положения дроссельной заслонки или датчиком 26 , который передает данные в реальном времени на электронный блок управления .20 относительно текущего положения педали акселератора 24 . Выход датчика 26 может представлять собой переменное напряжение, кодированный сигнал или любой другой поток данных, совместимый с электронным блоком 20 управления, который легко обнаруживается и считывается. Сигнал текущего положения от датчика положения дроссельной заслонки 26 также может быть дифференцирован в электронном блоке управления 20 для получения сигнала скорости движения, то есть производных сигналов dT/dt, то есть изменения положения акселератора или педаль газа 24 за единицу времени.
Кроме того, электронный блок управления 20 обычно получает сигнал от датчика частоты вращения выходного вала двигателя 28 , указывающий текущую скорость вращения выходного вала двигателя. Датчик частоты вращения входного вала 32 в режиме реального времени передает в электронный блок управления 20 данные о скорости вращения входного вала коробки передач 16 . Точно так же датчик 9 частоты вращения выходного вала коробки передач0169 34 предоставляет данные о частоте вращения выходного вала 18 коробки передач 16 в режиме реального времени.
Некоторые аспекты и компоненты двигателя 12 , сцепления 14 и трансмиссии 16 управляются электронным блоком управления 20 . Например, узел управления подачей топлива 42 регулирует подачу топлива в двигатель 12 в соответствии с положением дроссельной заслонки 24 , на что указывает датчик положения дроссельной заслонки 26 , а также различные программы, подпрограммы и алгоритмы, управляющие общей работой двигателя 12 , главного фрикциона 14 и коробки передач 16 . Например, во время переключения передачи подача топлива в двигатель 12 может быть на мгновение уменьшена узлом управления подачей топлива 42 , чтобы способствовать синхронизации выходного вала двигателя и входного вала трансмиссии на вновь выбранной передаче. Оператор сцепления 44 получает выходной сигнал от электронного блока управления 20 и включает и выключает главный фрикцион 14 . Узел привода и датчика переключения передач 46 включает в себя множество пневматических, гидравлических или электрических приводов и связанных с ними датчиков линейного перемещения, которые, прежде всего, включают и выключают различные передаточные числа в различных секциях трансмиссии 16 и предоставляют данные, касающиеся положения таких приводов к электронному блоку управления 20 соответственно.
Например, во время переключения передачи подача топлива в двигатель 12 может быть на мгновение уменьшена узлом управления подачей топлива 42 , чтобы способствовать синхронизации выходного вала двигателя и входного вала трансмиссии на вновь выбранной передаче. Оператор сцепления 44 получает выходной сигнал от электронного блока управления 20 и включает и выключает главный фрикцион 14 . Узел привода и датчика переключения передач 46 включает в себя множество пневматических, гидравлических или электрических приводов и связанных с ними датчиков линейного перемещения, которые, прежде всего, включают и выключают различные передаточные числа в различных секциях трансмиссии 16 и предоставляют данные, касающиеся положения таких приводов к электронному блоку управления 20 соответственно.
Как отмечалось выше, быстрое нажатие на педаль акселератора 24 практически любого транспортного средства, оснащенного автоматической коробкой передач, интерпретируется трансмиссией и связанными с ней компонентами как желание быстро разогнать автомобиль за счет увеличения оборотов двигателя 12 и понижение передачи 16 . Датчик положения дроссельной заслонки 26 , как уже отмечалось, обеспечивает сигнал в реальном времени относительно текущего положения педали акселератора 9.0169 24 . В электронном блоке управления 20 это положение может быть считано как фактическое измеренное расстояние, может быть считано и использовано как процент хода, например, от нуля до ста процентов, или может быть закодировано в любых числовых или буквенных данных. цепь, которая легко распознается и используется другими компонентами электронного блока управления 20 для обозначения фактического положения педали газа 24 .
Датчик положения дроссельной заслонки 26 , как уже отмечалось, обеспечивает сигнал в реальном времени относительно текущего положения педали акселератора 9.0169 24 . В электронном блоке управления 20 это положение может быть считано как фактическое измеренное расстояние, может быть считано и использовано как процент хода, например, от нуля до ста процентов, или может быть закодировано в любых числовых или буквенных данных. цепь, которая легко распознается и используется другими компонентами электронного блока управления 20 для обозначения фактического положения педали газа 24 .
Обратимся теперь к фиг. 2, электронный блок управления 20 включает в себя различное программное обеспечение и алгоритмы, которые получают данные о положении педали акселератора 24 и датчика 26 в реальном времени и управляют переключением на более низкую передачу и ускорением двигателя в соответствии с различными программными правилами. В верхней части фиг. 2, график управляемой оператором активности дроссельной заслонки 24 включает в себя несколько событий, которые интерпретируются программным обеспечением как желание или требование переключения на пониженную передачу. Под графиком положения педали газа находятся пять различных графиков, представляющих пять различных режимов считывания и работы электронного блока управления 9.0169 20 , которые обеспечивают пять различных ответов на действия оператора, показанные в верхней части фиг. 2.
2, график управляемой оператором активности дроссельной заслонки 24 включает в себя несколько событий, которые интерпретируются программным обеспечением как желание или требование переключения на пониженную передачу. Под графиком положения педали газа находятся пять различных графиков, представляющих пять различных режимов считывания и работы электронного блока управления 9.0169 20 , которые обеспечивают пять различных ответов на действия оператора, показанные в верхней части фиг. 2.
Обратимся сначала к графику А. Здесь представлен сигнал пониженной передачи, который генерируется исключительно полным или практически полным нажатием педали акселератора или дроссельной заслонки 24 . Для обеспечения того, чтобы команда кикдауна подавалась тогда, когда этого хочет водитель, в качестве порога для кикдауна было выбрано 95% хода педали акселератора 24 и датчика положения дроссельной заслонки 26 . Понятно, что это 9Пороговое значение 5 % можно отрегулировать, например, до 90 %, чтобы приспособиться и достичь несколько иных проектных и рабочих параметров. Более высокие значения повышают вероятность того, что они не будут превышены из-за неправильной регулировки рычажного механизма, износа компонентов или посторонних предметов, застрявших за педалью газа 24 , что помешает запланированному понижению передачи. Более низкие значения, такие как ниже 90%, могут вызвать сигнал понижения передачи и связанную с ним активность при меньшем ходе дроссельной заслонки, чем обычно желательно. Следует отметить, что График А находится в высоком или логическом положении 1, что требует понижения передачи только во время и всегда во время периодов, когда положение дроссельной заслонки 24 превышает порог 95% кикдауна.
Более высокие значения повышают вероятность того, что они не будут превышены из-за неправильной регулировки рычажного механизма, износа компонентов или посторонних предметов, застрявших за педалью газа 24 , что помешает запланированному понижению передачи. Более низкие значения, такие как ниже 90%, могут вызвать сигнал понижения передачи и связанную с ним активность при меньшем ходе дроссельной заслонки, чем обычно желательно. Следует отметить, что График А находится в высоком или логическом положении 1, что требует понижения передачи только во время и всегда во время периодов, когда положение дроссельной заслонки 24 превышает порог 95% кикдауна.
При наличии комплектующих некоторых компонентов автомобиля, а также при различных конструкциях и целях эксплуатации может потребоваться определение рабочих параметров в дополнение к положению дроссельной заслонки 24 , чтобы влиять или контролировать решение о понижении передачи. График B иллюстрирует такой первый альтернативный режим работы. Здесь должны удовлетворяться как 95% порог положения кикдауна, так и скорость движения педали акселератора 24 сверх заданного порога, чтобы электронный блок управления 20 для подачи команды Kickdown. Слева на графике положения дроссельной заслонки находится крутой градиент, который в сочетании с 95% порогом положения пониженной передачи заставляет электронный блок управления 20 генерировать команду понижения пониженной передачи, как показано на логической схеме, которая перемещается от нуля или низкого уровня к единице. или высокий, когда превышены достаточно крутой градиент положения дроссельной заслонки (производная) и 95% порог положения пониженной передачи. Для сравнения обратите внимание на то, что в середине графика положения дроссельной заслонки наблюдается небольшой уклон в сочетании с положением дроссельной заслонки, превышающим 9 градусов.5%-й порог Kickdown не генерирует сигнал Kickdown от электронного блока управления 20 .
Здесь должны удовлетворяться как 95% порог положения кикдауна, так и скорость движения педали акселератора 24 сверх заданного порога, чтобы электронный блок управления 20 для подачи команды Kickdown. Слева на графике положения дроссельной заслонки находится крутой градиент, который в сочетании с 95% порогом положения пониженной передачи заставляет электронный блок управления 20 генерировать команду понижения пониженной передачи, как показано на логической схеме, которая перемещается от нуля или низкого уровня к единице. или высокий, когда превышены достаточно крутой градиент положения дроссельной заслонки (производная) и 95% порог положения пониженной передачи. Для сравнения обратите внимание на то, что в середине графика положения дроссельной заслонки наблюдается небольшой уклон в сочетании с положением дроссельной заслонки, превышающим 9 градусов.5%-й порог Kickdown не генерирует сигнал Kickdown от электронного блока управления 20 .
Другой вариант управления показан на графике C, где 95-процентный порог положения педали акселератора в режиме пониженной передачи сочетается с таймером или функцией задержки, которая измеряет, как долго педаль акселератора 24 была нажата за порогом положения пониженной передачи.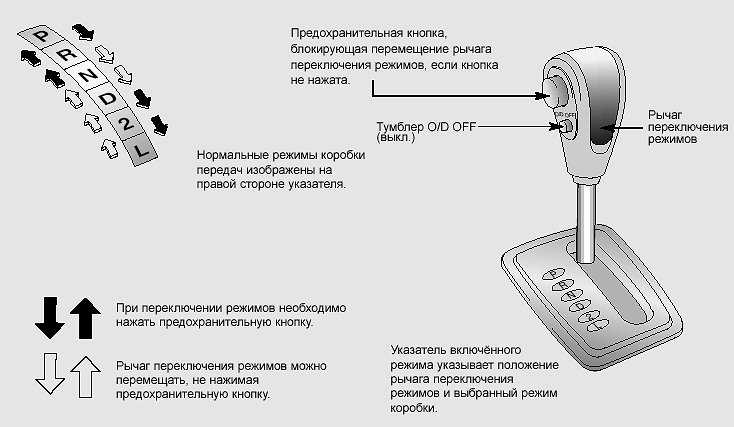 Время t мин представляет собой короткий интервал времени, такой как 2, 3, 5, 8, 10, 12 или 15 секунд или более или менее, который может быть выбран эмпирически или экспериментально и в течение которого педаль 9 акселератора0169 24 должен поддерживаться выше порога Kickdown, чтобы генерировался сигнал Kickdown. Когда пороговое значение положения пониженной передачи превышается в течение заданного времени, т. е. истекает время таймера 3, 5 или 10 секунд, электронный блок управления 20 генерирует сигнал пониженной передачи.
Время t мин представляет собой короткий интервал времени, такой как 2, 3, 5, 8, 10, 12 или 15 секунд или более или менее, который может быть выбран эмпирически или экспериментально и в течение которого педаль 9 акселератора0169 24 должен поддерживаться выше порога Kickdown, чтобы генерировался сигнал Kickdown. Когда пороговое значение положения пониженной передачи превышается в течение заданного времени, т. е. истекает время таймера 3, 5 или 10 секунд, электронный блок управления 20 генерирует сигнал пониженной передачи.
Также можно комбинировать функции положения, градиента (производного) и таймера или задержки. Это представлено на графике D на фиг. 2. Обратите внимание, что только активность в левой части графика положения дроссельной заслонки, которая включает крутой градиент или производную, конечное положение, превышающее пороговое значение понижения передачи, и поддержание положения дроссельной заслонки за пределами порогового значения положения пониженной передачи в течение минимального или эталонного времени t 903:35 мин. командует переключением на кикдаун.
командует переключением на кикдаун.
Окончательный график E представляет рабочее состояние, при котором три требования кривой D, положение дроссельной заслонки за пределами порогового значения, градиент или производная выше контрольного значения, положение дроссельной заслонки за пороговым значением, превышающее контрольное значение или заданный период времени, сочетаются с пороговым значением сброса. . Порог сброса определяет, была ли педаль акселератора 26 полностью или по существу полностью отпущена и находится ли она, по крайней мере на мгновение, по существу в ненажатом или неактивированном состоянии. Опять же, в целях обеспечения достоверных данных, порог сброса не устанавливается на 0% хода, а составляет значение от 5 до 15% и предпочтительно около 10%. Таким образом, только когда педаль газа 24 был отпущен или существенно отпущен, а затем последовал градиент или производная за порогом, конечное положение за порогом понижения и конечное положение за порогом понижения, которое сохраняется по крайней мере в течение минимального периода времени, будет сигналом понижения генерируется электронным блоком управления.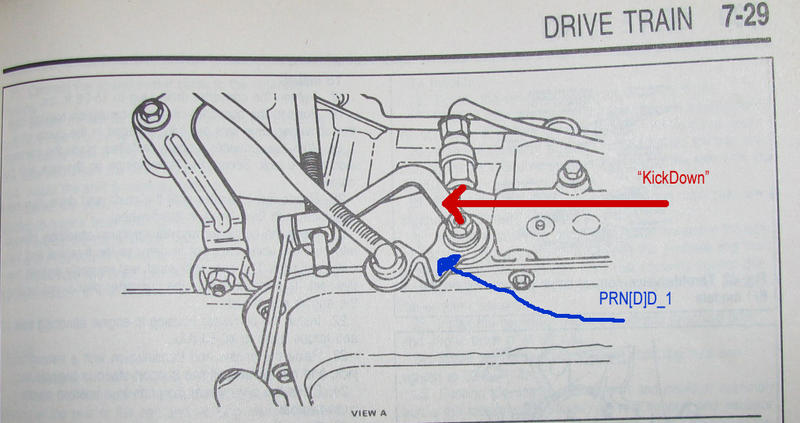
Обратимся теперь к фиг. 3, компьютерная программа или блок-схема программного обеспечения, иллюстрирующая подпрограмму для различных режимов работы или конфигураций, представленных на фиг. 2 проиллюстрировано на фиг. 3. Программная подпрограмма 50 начинается с шага инициализации 52 , который очищает все регистры и заново запускает итерационный цикл подпрограммы 50 . Первая точка принятия решения 54 запрашивает, включена ли функция сброса газа. Это дополнительный этап, показанный на диаграмме E в нижней части фиг. 2. Если функция сброса дроссельной заслонки включена, точка принятия решения 54 завершается при ДА, и программа 50 переходит ко второй точке принятия решения 9.0169 56 , который запрашивает, упало ли положение дроссельной заслонки ниже минимального положения, такого как пороговое значение 10%, показанное на Графике E на РИС. 2. Если положение дроссельной заслонки не было ниже минимума или положения сброса в течение этого цикла, точка принятия решения 56 завершается как НЕТ, и программа 50 завершается в конечной точке 58 , которую необходимо повторить в соответствии с время итерации по команде исполнительной системы электронного блока управления 50 .
Возврат к точке принятия решения 54 , если функция сброса дроссельной заслонки не была включена, что относится к графикам A, B, C и D, точка принятия решения 54 завершается при НЕТ, и программа переходит к решению точка 62 . Аналогичным образом, если положение дроссельной заслонки упало ниже минимального положения дроссельной заслонки, точка принятия решения 56 выходит из состояния YES. В обоих случаях программа 50 входит в точку принятия решения 62 , которая запрашивает, включена ли функция градиента. Эта функция отображается на графиках B и D. Если функция градиента включена, программа переходит к точке принятия решения 9.0169 64 , который запрашивает, больше ли градиент или производная dT/dt опорного значения градиента или производной. Если это не так, то выход из точки принятия решения 64 завершается как НЕТ и программа 50 возвращается к своей конечной точке 58 . Если градиент или производная больше опорного значения, выход из точки принятия решения 64 завершается ДА, и программа 50 переходит к точке принятия решения 66 . Точно так же, если функция градиента не включена, точка принятия решения 62 завершается в NO, и программа 50 также переходит к точке принятия решения 66 .
Точно так же, если функция градиента не включена, точка принятия решения 62 завершается в NO, и программа 50 также переходит к точке принятия решения 66 .
Точка принятия решения 66 запрашивает, превысило ли положение дроссельной заслонки максимальное значение дроссельной заслонки, 95% хода дроссельной заслонки, как показано на РИС. 2. Обратите внимание, что запрос положения дроссельной заслонки не активируется, потому что каждый смоделированный рабочий режим пониженной передачи, показанный на РИС. 2 использует и определяет фактическое положение дроссельной заслонки. Таким образом, если положение дроссельной заслонки не превысило 95% порог, точка принятия решения 66 завершается при NO и программа завершается в конечной точке 58 . Если положение дроссельной заслонки превысило максимальное или пороговое значение, точка принятия решения 66 завершается с ответом YES, и программа 50 входит в точку принятия решения 68 , которая запрашивает, включен ли таймер или функция задержки времени. Если это не так, точка принятия решения 68 завершается как НЕТ, и программа 50 выдает команду кикдауна на шаге 9 процесса.0169 70 . Если функция таймера включена, точка принятия решения 68 завершается со значением ДА, и программа 50 переходит к точке принятия решения 72 , которая запрашивает, превышает ли время, в течение которого педаль акселератора 24 превышает пороговое значение понижения задержка или контрольное время. Если это не так, то выход из точки принятия решения 72 завершается как НЕТ, и программа завершается на шаге 58 . Если время больше контрольного времени, точка принятия решения 72 завершается при YES, и на шаге 70 генерируется сигнал Kickdown.
Если это не так, точка принятия решения 68 завершается как НЕТ, и программа 50 выдает команду кикдауна на шаге 9 процесса.0169 70 . Если функция таймера включена, точка принятия решения 68 завершается со значением ДА, и программа 50 переходит к точке принятия решения 72 , которая запрашивает, превышает ли время, в течение которого педаль акселератора 24 превышает пороговое значение понижения задержка или контрольное время. Если это не так, то выход из точки принятия решения 72 завершается как НЕТ, и программа завершается на шаге 58 . Если время больше контрольного времени, точка принятия решения 72 завершается при YES, и на шаге 70 генерируется сигнал Kickdown.
Весь процесс в программе 50 проиллюстрирован на графике E. Если функция сброса дроссельной заслонки не включена, функция градиента не включена и используются положение дроссельной заслонки и функция таймера, операция представлена на графике C. Если функция сброса дроссельной заслонки не включена, но используются функция градиента и положение дроссельной заслонки, это представлено на графике B. Если функция сброса дроссельной заслонки и функция градиента не включены, но положение дроссельной заслонки используется с включенной функцией таймера, этот рабочий режим представлен на графике C. Если все дополнительные функции отключены, то есть функция сброса дроссельной заслонки, функция градиента и функция таймера, положение дроссельной заслонки, превышающее пороговое значение кикдауна, генерирует сигнал кикдауна, который представлен на График А.
Если функция сброса дроссельной заслонки не включена, но используются функция градиента и положение дроссельной заслонки, это представлено на графике B. Если функция сброса дроссельной заслонки и функция градиента не включены, но положение дроссельной заслонки используется с включенной функцией таймера, этот рабочий режим представлен на графике C. Если все дополнительные функции отключены, то есть функция сброса дроссельной заслонки, функция градиента и функция таймера, положение дроссельной заслонки, превышающее пороговое значение кикдауна, генерирует сигнал кикдауна, который представлен на График А.
После генерирования сигнала или команды понижения передачи при выполнении одного из наборов условий, представленных на графиках A, B, C, D или E на фиг. 2, электронный блок управления 20 , как правило, приступает к командованию и выполнению переключения на одну, две или более передач вниз путем выдачи соответствующих команд на блок управления подачей топлива 42 , оператор сцепления 44 и оператор переключения и датчик в сборе . 46 в соответствии с его установленными программами и подпрограммами. Следует понимать, что эти программы и подпрограммы могут быть такими же или подобными программам и подпрограммам, ранее использовавшимся с механическим переключателем предшествующего уровня техники, активируемым нажатием на полный газ.
46 в соответствии с его установленными программами и подпрограммами. Следует понимать, что эти программы и подпрограммы могут быть такими же или подобными программам и подпрограммам, ранее использовавшимся с механическим переключателем предшествующего уровня техники, активируемым нажатием на полный газ.
Также следует понимать, что сгенерированный электронным способом или смоделированный сигнал понижения передачи или команда для автоматизированной механической трансмиссии обеспечивает многочисленные преимущества. Прежде всего, эта конфигурация исключает механический переключатель, который может выйти из строя. Однако более важно то, что данные датчика 26 положения дроссельной заслонки могут использоваться через электронный блок 20 управления для установления или подачи команды на понижение передачи на основании нескольких рабочих условий, а также различных значений таких рабочих условий, как показано на фиг. 2.
Вышеприведенное раскрытие является лучшим способом, разработанным изобретателем для осуществления этого изобретения.