Что такое система управления предприятием?
Управление может осуществляться только в том случае, когда существует система, реально действует, решая задачи управления. Если данная система является органической частью предприятия, ее действиями осуществляется управление и она не решает задач, отличных от управленческих, то ее можно рассматривать как специализированную систему или же как систему управления.
Система управления является формой реального воплощения управленческих взаимосвязей. Она выступает в виде реально существующей субстанции, посредством которой управление приобретает конкретное содержание и конкретное проявление, а функция управления приобретает практическую реализацию. Таким образом, управленческая деятельность – это функционирование системы управления.
Система управления состоит и действует не только в соответствии с содержанием функции управления и характером отношений, которые лежит в основе управленческих взаимосвязей, но и согласно условиям, в которых формируется система управления, а также согласно присущим системе управления принципам ее построения, функционирования и преобразования.
Что собой представляет структурно-функциональная подсистема системы управления предприятием?
Система управления разделяется на подсистемы. Выделение этих подсистем наглядно проявилось относительно недавно. Первой подсистемой является то, что ранее было принято рассматривать как собственно систему управления. Это совокупность управленческих органов, подразделений и исполнителей, осуществляющих закрепленные за ними функции и решающих поставленные перед ними задачи, а также совокупность методов, с помощью которых осуществляется управленческое воздействие. Данную подсистему системы управления можно рассматривать как единство организации, технологии и методов управления. При дальнейшем рассмотрении данная подсистема получила название структурно-функциональной подсистемы системы управления предприятием. Обычно именно структурно-функциональная подсистема подвергается самому тщательному анализу и описанию при рассмотрении вопросов построения и функционирования системы управления.
Структурно-функциональная подсистема выступает в роли «костяка», «остова» или даже «тела» системы управления. Причем при определенном уровне развития управления «тело» системы управления фактически эквивалентно системе управления в целом. Но всякий развитый организм не эквивалентен только своему телу. Есть еще нечто исключительное, что условно можно назвать «душой» организма. Чем выше уровень развития организма, тем выше значимость этой его подсистемы. Что же можно считать душой системы управления? Ответ на этот вопрос можно получить, если проанализировать вторую подсистему системы управления.
Критерием, определяющим вид организационной структуры предприятия, является принцип разделения труда, предоставленных полномочий, степени ответственности и форм контроля. Выделяют следующие виды организационных структур:
- линейная – представляет собой иерархическую лестницу подчинения.
 Предполагается подчинение каждого работника одному непосредственному руководителю. Система управления разделена на составные части по производственному признаку; во главе каждой структурной составляющей находится ее руководитель, которому и подчиняются все работники данного подразделения. Гарантирует четкую систему подчиненности, полноты власти на каждом уровне, быстроту выполнения распоряжений, дисциплину подчиненных. Вместе с тем характеризуется негибкостью, трудностью согласованных действий подразделении, перегруженностью работников высшего руководящего звена. Считается непригодной для предприятий, работающих в рыночных условиях;
Предполагается подчинение каждого работника одному непосредственному руководителю. Система управления разделена на составные части по производственному признаку; во главе каждой структурной составляющей находится ее руководитель, которому и подчиняются все работники данного подразделения. Гарантирует четкую систему подчиненности, полноты власти на каждом уровне, быстроту выполнения распоряжений, дисциплину подчиненных. Вместе с тем характеризуется негибкостью, трудностью согласованных действий подразделении, перегруженностью работников высшего руководящего звена. Считается непригодной для предприятий, работающих в рыночных условиях; - пирамидальная – предусматривается расширение числа звеньев, при этом выделение новых звеньев происходит по разным принципам, чаще всего по выполняемым функциям. Для пирамидальной структуры характерно отделение управленческих структур от исполнительских, что предопределяет вертикаль подчинения. Расширение объема и номенклатуры выполняемых функций ведет к созданию многоуровневых иерархических структур.
 Предполагается подчинение каждого работника одному непосредственному руководителю. Система управления разделена на составные части по производственному признаку; во главе каждой структурной составляющей находится ее руководитель, которому и подчиняются все работники данного подразделения. Гарантирует четкую систему подчиненности, полноты власти на каждом уровне, быстроту выполнения распоряжений, дисциплину подчиненных. Вместе с тем характеризуется негибкостью, трудностью согласованных действий подразделении, перегруженностью работников высшего руководящего звена. Считается непригодной для предприятий, работающих в рыночных условиях;
Предполагается подчинение каждого работника одному непосредственному руководителю. Система управления разделена на составные части по производственному признаку; во главе каждой структурной составляющей находится ее руководитель, которому и подчиняются все работники данного подразделения. Гарантирует четкую систему подчиненности, полноты власти на каждом уровне, быстроту выполнения распоряжений, дисциплину подчиненных. Вместе с тем характеризуется негибкостью, трудностью согласованных действий подразделении, перегруженностью работников высшего руководящего звена. Считается непригодной для предприятий, работающих в рыночных условиях;
Как можно охарактеризовать информационно-поведенческую подсистему системы управления?
Основными частями данной подсистемы являются следующие блоки:
- Управленческая идеология и ценностная ориентация системы управления.
- Интересы и поведенческие нормативы участников процесса управленческой деятельности.
- Информация и информационное обеспечение коммуникаций в системе управления.
Совокупность данных трех блоков в основном покрывает всю данную подсистему, хотя применительно к определенным системам управления можно указать на существование дополнительных блоков, играющих определенную роль в данной подсистеме. Такими блоками могут быть, например, блоки национальных интересов и даже национальных управленческих стереотипов либо блоки реализации в управлении идеологических установок. Данные блоки следует принципиально отличать от первого выделенного блока управленческой идеологии, поскольку они служат выразителями определенных видов идеологии, существующей в обществе, вообще, а не только управленческой идеологии.
И основные названные блоки, и блоки, возникающие в конкретных условиях и имеют явно выраженный ситуационный характер, находятся в динамическом взаимодействии как между собой, так и с элементами структурно-функциональной подсистемы системы управления. При этом в различных системах управления в зависимости от общих свойств системы, ее характерных особенностей, а также в зависимости от уровня развитости системы управления и условий осуществления управленческой деятельности степень проявления отдельных блоков, а также характер их взаимодействия могут отличаться. Однако в других случаях данная подсистема имеет общее свойство, суть которого состоит в том, что она связывает воедино (и не только связывает, а и сводит воедино в успешно функционирующих системах управления) на основе развития информационных каналов и связей цели организации, которые воплощаются в критериях функционирования, управленческую идеологию, интересы и критериально-нормативную базу работников управления, процедуры и организацию управленческой деятельности.
Реальными формами проявления данной подсистемы являются:
- Управленческие теории и управленческая идеология.
- Формальные и неформальные отношения управленческих работников с представителями внешнего окружения.
- Уровень организационного развития, а также уровень развития каждого отдельного работника управленческого звена.
- Информированность работников, носители информации, методы распространения информации.
В настоящее время в связи с процессом ускоренного и расширенного распространения информации, что объективно происходит, а также в связи с заметным увеличением значимости синергического эффекта, получаемого от органично осуществляемых совместных действий, резко возрастает роль информационно-поведенческой подсистемы системы управления.
Существует несколько достаточно выраженных типов информационно-поведенческих подсистем.
Первый тип характеризуется наличием формальной организации деятельности и отношений в системе управления. Деятельность инициируется распоряжениями и требует наличия формального контроля исполнения, отношение к работе безразлично, безответственно и безынициативно. Интересы работников и их умения направлены вовне организации. Отношения между работниками по поводу работы формальные, неформальные отношения связаны с интересами, находящихся за пределами организации. Уровень информированности невысок, доступность информации низкая как из-за формальных ограничений, так и вследствие слабости и неразвитости технической базы обращения к информации и ее распространения.
Второй тип информационно-поведенческой подсистемы характеризуется наличием беспокойства в отношениях, наличием конфликтных ситуаций, стремлением отдельных членов коллектива к привнесению изменений в основном за счет других членов либо путем организационных перестроек. Отсутствует безразличие, характерное для первого типа, однако и нет органической заинтересованности в реальном повышении эффективности и качества функционирования всего коллектива.
Третий тип характеризуется наличием заинтересованности в конечных результатах функционирования системы управления, стремлением к получению больших результатов за счет совершенствования внутренних отношений, развития всех членов организации и повышения уровня совместной трудовой деятельности. Широкое распространение имеют групповые формы совместной деятельности, однако они носят довольно формальный характер. Для этого типа характерны доброжелательность в отношениях, стремление к разрешению конфликтных ситуаций, открытость в высказываниях, склонность к сотрудничеству.
Четвертый тип информационно-поведенческой подсистемы характеризуется наличием такого состояния системы управления, при котором состоит органичное сочетание личных интересов со стремлением к получению высоких конечных результатов функционирования организации в целом. Для данного типа характерны ориентация на конечные результаты, равно организуемость и самонастраивание. Состояние отношений в системе настолько высоко развито, что позволяет системе гибко адаптироваться к новым задачам и условиям, т.е. осуществлять саморазвитие системы управления. Хранение, получение необходимой информации, ее передача и обработка осуществляются с помощью быстродействующих и высокопроизводительных технических средств.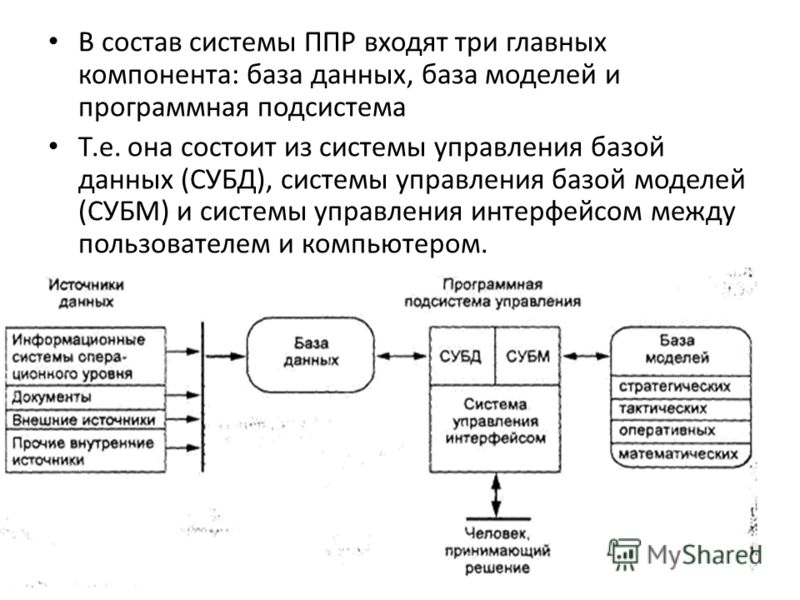
Как можно охарактеризовать подсистему саморазвития в системе управления?
Третьей подсистемой системы управления является подсистема саморазвития. Появление этой подсистемы связано с возникновением в системе управления таких качеств, как стремление к самосовершенствованию, гибкость и адаптивность к изменениям, ориентация на нововведения, поиск и разработка прогрессивных идей и ускоренное введение их в практику функционирования системы управления.
Подсистема саморазвития не только отражает названные качества системы управления, она является генератором этих качеств, она несет в себе механизм их воспроизводства, закрепления, распространения и практического внедрения. Данная подсистема является источником и проводником потребности системы управления в самосовершенствовании и одновременно носителем механизма, посредством которого осуществляется развитие системы управления.
Подсистема саморазвития может быть разделена на две части. Первая часть подсистемы ориентирует систему управления на постоянное совершенствование и развитие. Она обеспечивает потребность системы управления в изменении в направлении улучшения, а также в регулярном обновлении. Для данной части подсистемы характерно решение следующих задач и выполнения следующих функций:
- разработка, введение в систему управления и постоянное поддержание должного уровня стимуляторов, побуждающих систему управления к саморазвитию;
- постоянный анализ уровня функционирования системы управления, ее имеющихся и потенциальных возможностей;
- анализ динамики задач, стоящих перед системой управления в условиях изменения окружающей среды;
- выявление новых тенденций и направлений развития систем управления, наблюдающихся в мировой практике менеджмента;
- анализ используемых форм и методов обновления систем управления.
Данная часть подсистемы саморазвития очень тесно примыкает к информационно-поведенческой подсистеме системы управления, и ее функциональные возможности в значительной мере определяются уровнем развитости информационно-поведенческой подсистемы. Это связано с тем, что и готовность к изменениям, и адаптивность, и гибкость, и мобильность, и, наконец, заинтересованность в высоких конечных результатах функционирования системы управления, ориентация на результат совместной деятельности преимущественно задаются состоянием информационно-поведенческой подсистемы.
Это связано с тем, что и готовность к изменениям, и адаптивность, и гибкость, и мобильность, и, наконец, заинтересованность в высоких конечных результатах функционирования системы управления, ориентация на результат совместной деятельности преимущественно задаются состоянием информационно-поведенческой подсистемы.
Вторая часть подсистемы саморазвития обеспечивает развитие системы управления. Наиболее существенными задачами, решаемыми ею, являются следующие:
- выработка траекторий саморазвития системы управления, включающей поиск возможностей совершенствования;
- описание нового состояния системы управления;
- разработка процедуры и содержания перехода в новое состояние;
- определение средств обеспечения этого перехода;
- организация перехода системы управления в новое состояние, включающая составление программы перехода, распределение заданий и позиций между субъектами перехода, распределение функций координации и корректировки их деятельности в процессе перехода и т. п.;
- анализ результатов перехода, обобщение опыта работы по переводу системы управления в новое состояние;
- получение выводов по развитию подсистемы саморазвития системы управления.
 п.;
п.;Важнейшим направлением функционирования подсистемы развития является развитие кадров системы управления. Это обусловлено тем, что единственно возможным реальным движением системы управления может быть только движение ее кадров, во-первых, по вертикали (должностное продвижение), во-вторых, по горизонтали (смена профиля работ и рабочего места) и, в-третьих, вглубь (улучшение поведения и способностей в общении, рост позитивного отношения к работе, повышение профессиональной квалификации, производственного кругозора и навыков работы, овладение смежными профессиями и современными средствами обработки и передачи информации).
Системы управления автомобилем
Под системой управления автомобилем понимается совокупность устройств и (или) механизмов, предназначенных для изменения скорости авто и изменения направления движения.
Система изменения скорости движения, попросту тормозная система, является главным узлом безопасности водителя и пассажиров. Служит так же для экстренного торможения в случае необходимости.
Система изменения направления движения (рулевое управление) применяется для «адекватного» управления авто. Почему адекватного? Все очень просто, можно было бы установить и автопилот для управления, но ни одна, даже очень «умная» автоматическая система управления не сможет оценить дорожную ситуацию и среагировать правильно.
Знаете, какая тормозная система была на самом первом автомобиле? Никакой! Водитель просто заливал необходимое количество топлива, что бы доехать до определенной точки, после чего двигатель глох и автомобиль останавливался.
В настоящее время тормозные системы «шагнули» так далеко, что появились полуавтоматические тормоза, но об этом позже. Самые, конечно, распространенные тормозные системы, это гидравлические барабанные или дисковые тормоза.
Рулевое управление первых автомобилей не отличалось оригинальностью, это была простая рычажная система, которая при вращении руля или движения рычагов поворачивала колеса в ту или другую сторону.
Современная рулевая система управления представляет собой сложнейший узел, где применяются «помощники» водителя – гидроусилители, антипробуксовочные системы, и др. Ну а рулевые рычаги? Конечно, остались, но претерпели очень серьёзные изменения.
Есть еще одна система управления на современных автомобилях – бортовой компьютер, который берет на себя функцию контроля и управления за узлами, механизмами, на основании полученных данных от внешних датчиков.
|
РЕКОМЕНДУЕМ ТАКЖЕ ПРОЧИТАТЬ:
|
Системы управления знаниями – обзор зарубежного опыта
Что из себя представляет система управления знаниями? Поскольку сама концепция зародилась за рубежом, за ответом на этот вопрос мы обратились к зарубежным источникам. Перед вами перевод популярной статьи “What is KM? Knowledge Management Explained” Майкла Е. Д. Кёнига — профессора и бывшего декана Колледжа информационных технологий и информатики Университета Лонг Айленда.
Д. Кёнига — профессора и бывшего декана Колледжа информационных технологий и информатики Университета Лонг Айленда.
В этой статье мы рассмотрим:
Что такое система управления базами знаний?
Управление знаниями (knowledge management) — это концепция, которая появилась примерно два десятилетия назад, где-то в 1990х. Пожалуй, можно сходу дать определение термину “управление знаниями” — это организация и систематизация информации и знаний в компании. Однако это определение звучит как-то расплывчато и слишком широко, но при этом — как ни странно — не дает увидеть полной картины. В самом начале становления систем управления знаниями Томас Давенпорт предложил определение, которым пользуются до сих пор:
«Управление знаниями — это процесс сбора, распространения и эффективного использования знаний».
Несколько лет спустя Gartner Group предложила более подробное определение:
«Управление знаниями — это система, которая предполагает интегрированный подход к поиску, сбору, оценке, восстановлению и распространению всех информационных активов предприятия. В состав таких активов могут входить базы данных, документы, политики, процедуры, а также знания и опыт отдельных работников, которые ранее не фиксировались».
В состав таких активов могут входить базы данных, документы, политики, процедуры, а также знания и опыт отдельных работников, которые ранее не фиксировались».
У обоих определений очень организационная, корпоративная природа — ведь исторически системы управления знаниями формировались именно в организациях. Пожалуй, основная суть системы управления знаниями в сборе и фиксации информации и знаний, которыми владеют сотрудники, и в распространении этих знаний между всеми членами коллектива.
Состав системы управления знаниями на примере IBM
Чтобы наиболее наглядно изобразить, что входит в состав системы управления знаниями, рассмотрим таблицу для консультантов по управлению знаниями, разработанную в IBM. Она основывается на разграничении процессов сбора информации и объединения людей. Мы приводим ее с небольшими изменениями:
| Сбор информации и кодификация | Соединение людей и персонализация | |
| Прямой поиск и использование информации и знаний |
|
|
| СОБИРАЕМ УРОЖАЙ (HARVEST) | ЗАПРЯГАЕМ (HARNESS) | |
| Интуитивное исследование и изучение |
|
|
| ОХОТИМСЯ (HUNTING) | СТРОИМ ГИПОТЕЗЫ (HYPOTHESIZE) |
 Это актуально для крупных компаний с большими штатами сотрудников – прим. перев.)
Это актуально для крупных компаний с большими штатами сотрудников – прим. перев.)Источник: Том Шорт, старший консультант по управлению знаниями в IBM Global Services
Явные, потенциально явные и неявные знания
В литературе знания, как правило, подразделяются на явные и неявные (которые находятся в головах сотрудников). Однако эта классификация кажется слишком упрощенной и даже вводит в некоторое заблуждение. Существует более продуманная и адекватная классификация знаний: явные, потенциально явные и неявные знания.
Однако эта классификация кажется слишком упрощенной и даже вводит в некоторое заблуждение. Существует более продуманная и адекватная классификация знаний: явные, потенциально явные и неявные знания.
Явные: информация или знания, зафиксированные на материальных носителях.
Потенциально явные: информация или знания, которые еще не зафиксированы в материальной форме, но могут быть преобразованы в явные.
Неявные: информация или знания, которые сложно зафиксировать на материальных носителях.
В предметной литературе распространен классический пример “неявных” знаний от бизнесменов Нонака и Такеучи: для разработки и запуска в производство домашней хлебопечки требовались такие “кинестетические” знания, которые инженеры могли получить только работая рука об руку с пекарями и изучая ощущения от замешивания настоящего хлебного теста (Нонака и Такеучи, 1995).
Опасность упрощенного подразделения знаний только лишь на явные и неявные в том, что мы начинаем слишком упрощать методологии управления знаниями: для явных знаний используются методики “сбора информации”, для неявных — методики “соединения людей”. В этом контексте легко упустить тот факт, что в большинстве случаев требуется также преобразование неявных и потенциально явных знаний в явные — то есть их фиксация на материальных носителях.
Составляющие систем управления знаниями
Из чего состоит система управления знаниями? Очевидный ответ: из информации и данных, которые доступны всем членам организации через специальные порталы и системы управления контентом (content management systems). Система управления контентом — это наиболее очевидная и оперативная составляющая системы управления знаниями. Однако существуют еще три очень важных составляющих:
Базы извлеченных уроков (lessons learned)
В базе извлеченных уроков фиксируются и находятся в общем доступе те знания и опыт, которые были получены в ходе операционной деятельности, но не подлежат документированию в рамках стандартных процедур. В контексте управления знаниями упор обычно делается на сбор данных лично от участников деятельности, то есть превращение неявных знаний в явные.
Ранее в управлении знаниями использовался термин “лучшие практики” (best practices), но “извлеченные уроки” вскоре пришли на смену этому термину. Почему? Термин “извлеченные уроки” шире и содержательнее, в то время как “лучшие практики” ограничены по значению и явно подразумевают наличие какой-то одной “лучшей практики” для каждой ситуации. То, что в Северной Америке является лучшей практикой, может быть совершенно неуместным в контексте другой культуры. По инициативе ведущих международных консалтинговых фирм термин был заменен. Тем не менее, “лучшие практики”, а позднее “извлеченные уроки” стали отличительной чертой системы управления знаниями на ранних этапах развития.
История происхождения “извлеченных уроков”
Конечно, сам опыт сбора информации о лучших практиках или извлеченных уроках далеко не новый. Одним из возможных предшественников этой практики можно считать “разборы полетов”, которые проходили у пилотов после завершения миссий во времена Второй мировой войны. Основной целью таких разборов полетов была военная разведка, но очевидна была и дополнительная цель: сбор извлеченных уроков (хоть тогда этот термин и не использовался), чтобы передать знания другим пилотам и инструкторам.
Военные являются ярыми сторонниками концепции извлеченных уроков. Они обозначают уроки специальным термином: “отчет по результатам операции” (after action report). Суть концепции очень проста: не стоит полагаться на то, что сам участник операции подготовит отчет. Скорее всего, по завершении операции будет множество других дел, требующих его внимания. Должна существовать система, в рамках которой выделенный специалист по управлению знаниями проведет опрос участника операции, “отделит зерна от плевел” и обеспечит сохранение и распространение извлеченных уроков.
Современные примеры использования “извлеченных уроков”
Концепция извлеченных уроков ни в коем случае не сводится только лишь к военной отрасти. Лэрри Прусак (2004) описывает одно из самых слабых (по его мнению) мест корпоративных систем управления знаниями: зачастую по мере завершения проекта не проводится “разбор полетов” и не создается “отчет по результатам операции” — проектные команды быстро расформировываются, а члены команды назначаются на другие проекты. Организациям, которые работают по принципу проектных команд, необходимо уделять больше внимания сбору информации об извлеченных уроках и выделить ответственного за проведение такого рода работ.
Отличный пример “извлеченного урока” приводит консультант по управлению знаниями Марк Мацци (2003). История произошла, когда он работал в отделе управления знаниями в фармацевтической компании Wyeth. Компания Wyeth только что выпустила на рынок новый препарат для детей. Предполагалось, что продажи нового препарата будут выше, чем предыдущих: новое лекарство нужно было принимать раз в день, благодаря чему родителям было проще обеспечить соблюдение режима лечения.
Уровень продаж, достаточно высокий на начальном этапе, вскоре начал падать. Один из продавцов в ходе разговора с покупателями выяснил, что причиной падения продаж был неприятный вкус лекарства, вследствие чего дети отказывались принимать препарат. Решением стал апельсиновый сок, который прекрасно маскировал неприятный вкус лекарства. Продавцы стали предупреждать лечащих врачей, что лекарство нужно принимать вместе со стаканом апельсинового сока — и продажи выросли.
Недостатки системы извлеченных уроков
Однако применение на практике системы извлеченных уроков связано с определенными политическими и операционными сложностями. На многие вопросы оказалось сложно дать ответ. Кто решает, что извлеченный урок обладает определенной практической ценностью? Все ли работники имеют право на внесение в систему своих извлеченных уроков? Система работала наиболее успешно, когда находилась под постоянным наблюдением, которое подразумевало механизм проверки и утверждения извлеченных уроков до внесения их в систему. Насколько долго урок остается в системе? Кто принимает решение, что существующий урок больше не актуален?
Системе необходима четкая процедура проверки и фильтрации уроков. В противном случае процент действительно полезной информации в базе извлеченных уроков будет снижаться, а сама база станет громоздкой и неудобной.
Чтобы устаревшие уроки не загромождали систему, но оставались доступными при необходимости, нужно обеспечить процесс архивации данных.
Таким образом, прежде чем запускать систему извлеченных уроков, необходимо ответить на все эти вопросы и разработать четко отлаженные механизмы функционирования. В противном случае, система себя не оправдает и все ваши усилия по ее запуску пройдут впустую.
Определение местонахождения компетенций (expertise location)
Раз знания находятся в головах специалистов, то лучшим способом получить эти знания будет поговорить с этими специалистами. Однако поиск нужного эксперта, который обладает необходимыми знаниями, может стать настоящей проблемой.
Назначение системы местонахождения компетенций очевидно: поиск сотрудников организации, которые обладают знаниями в той или иной области. Такие системы раньше называли системами “желтых страниц”, но позднее появился более точный термин: expertise location — определение местонахождения компетенций.
Информационное обеспечение системы местонахождения компетенций происходит по трем каналам. Первый канал — это компетенции, указанные в резюме работников. Второй канал — это компетенции и области знаний, которые работники указывают в ходе самостоятельной оценки своих навыков (обычно это происходит посредством онлайн-анкетирования). И, наконец, третий канал — информация, автоматически полученная путем анализа входящих и исходящих коммуникаций работника. В состав анализируемых коммуникаций обычно входит email-переписка, а также активность в социальных сетях, таких как Twitter и Facebook.
Существуют специальные программные системы по подбору экспертов на каждый запрос. Большинство таких систем анализируют занятость экспертов, чтобы избежать их чрезмерной загрузки. Обычно это происходит так: система оценивает уровень необходимых компетенций, и, если наиболее подходящий специалист на данный момент занят, передает задачу следующему по уровню компетенции специалисту. В системе также можно установить приоритетность задачи: на наиболее важные задачи назначаются специалисты с максимально высоким расчетным уровнем необходимых компетенций.
Сообщества специалистов-практиков (communities of practice, CoPs)
Сообщества специалистов-практиков — это группы людей со схожими интересами, которые собираются вместе (лично или виртуально), чтобы поделиться опытом, обсудить проблемы и возможности, поговорить о лучших практиках и извлеченных уроках. Сообщества специалистов делают упор на социальную природу обучения в организациях.
Разговоры и обсуждения у кулера с водой в компаниях воспринимаются как должное, но если компания находится в разных географических регионах, необходим некий виртуальный “кулер с водой”. По тому же принципу, когда работники компании переходят с офисной работы на удаленную, необходимо создать им определенную виртуальную среду общения. В контексте систем управления знаниями под сообществами специалистов-практиков обычно понимаются группы специалистов, связанные посредством электронных каналов коммуникации. Преимущественно электронная природа связей объясняется тем, что сами системы управления знаниями зародились как способ обмена знаниями между географически удаленными подразделениями организации.
Классическим примером запуска сообществ специалистов может выступать Всемирный банк. Когда в 1995 году президентом Всемирного банка стал Джеймс Вулфенсон, он сосредоточил деятельность банка на распространении знаний о развитии. В связи с этим начали создаваться сообщества специалистов-практиков. Если такое сообщество занималось, к примеру, проблемами сооружения и обслуживания дорог в засушливых климатических условиях, то в него входили не только члены Всемирного банка, но и другие специалисты, обладающие знаниями и навыками в области сооружения дорог в засушливом климате: например, члены дорожного научно-исследовательского совета Австралии или работники департамента транспорта Аризоны.
Организация и обслуживание сообществ специалистов — не такое уж простое дело. Как отмечает Мери Дарем (2004), необходимо наличие как минимум трех ключевых ролей: менеджер, модератор и идейный лидер. Это не обязательно должны быть разные люди, но иногда это предпочтительно. Вот несколько вопросов, которые нужно продумать при формировании сообщества специалистов:
- Кто будет выступать в роли менеджера/модератора/идейного лидера?
- Каким образом будет осуществляться управление сообществом?
- Каждый ли сможет делать публикации в сообществе или предусмотрена система проверки/утверждения постов?
- Как планируется поддерживать сообщество живым и интересным?
- Когда и как (по каким правилам) удаляются посты?
- Каким образом архивируются удаленные посты?
- Кто проводит проверку активности сообщества?
- Кто ищет новых членов сообщества или выступает критиком степени полезности сообщества?
Как построить систему управления знаниями: опыт российских компаний
Paolo Conte Компания запустила смешанное обучение для директоров региональных магазинов. Программа рассчитана на три года. В основе очные тренинги: сотрудников учат подбирать персонал, управлять KPI подчиненных. Дистанционно директора закрепляют пройденный материал: проходят электронные курсы по теме, решают тесты. Благодаря подходу за два года компания вдвое повысила профессиональный уровень директоров магазинов, значительно увеличила дополнительные продажи и базу постоянных покупателей. Читать подробнее → |
Inventive Retail Group Компания дистанционно обучает продавцов из 333 магазинов по всей России при помощи электронных курсов, диалоговых тренажеров и электронных тестов. Сотрудники могут открыть материал с телефона, планшета или компьютера в любое время. Многие учатся на рабочем месте, пока нет клиентов. Результат: качество сервиса в магазинах увеличилось на 40%, продавцы досконально выучили свойства каждого продукта и могут грамотно рассказать о его преимуществах клиенту. Читать подробнее → |
Стадии развития систем управления знаниями
Если взглянуть на стадии развития систем управления знаниями с исторической точки зрения, можно многое понять о структуре этих систем.
Первая стадия: Информационные технологии
Причиной появления систем управления знаниями стали, по большей части, информационные технологии. Концепция интеллектуальной собственности выступила неким каркасом системы, а интернет стал инструментом. Организации с энтузиазмом приняли новые возможности, которые открывал интернет: обмен знаниями между подразделениями стал куда проще, отпала необходимость каждый раз “изобретать велосипед”, появилась возможность опережать конкурентов и повышать прибыль.
Термин “управление знаниями” впервые запустила консалтинговая компания McKinsey. Они быстро поняли, что создали отличный новый продукт, и в 1992 году Эрнст и Янг организовали первую конференцию по управлению знаниями в Бостоне. Главным результатом первой стадии развития систем управления знаниями стало то, что для повышения эффективности обмена знаниями и информацией стали использоваться новые технологии.
Первую стадию развития систем управления знаниями хорошо характеризует известное высказывание бывшего генерального директора Texas Instruments: “Если бы мы только знали, что мы знаем!» Именно на первой стадии в системах управления знаниями появились “лучшие практики” и “извлеченные уроки”.
Вторая стадия: Человеческие ресурсы и корпоративная культура
Развитие систем управления знаниями вступило во вторую стадию, когда стало понятно, что простое использование технологий не обеспечивает достаточно эффективного обмена информацией и знаниями. Необходимо было задействовать самих людей и культурные аспекты их взаимодействия. Вторую стадию можно было бы описать фразой про бейсбольное поле из старого фильма “Поле чудес”: “Если ты построишь его, они придут”. Хотя, если не уделить достаточное внимание человеческому фактору, такой подход легко может привести к быстрому и очень обидному провалу.
Стало очевидно, что применение систем управления знаниями должно повлечь за собой значительные изменения в корпоративной культуре. Возьмем, к примеру, описанный выше случай с детским лекарством, которое нужно было запивать апельсиновым соком. Доходы фармацевтов состоят не только из зарплаты, но и из премии, которую они получают по итогам продаж за год. Какой смысл фармацевту делиться с кем-то своим открытием, если это, скорее всего, повлечет снижение его премии в следующем году? Необходимы существенные изменения в корпоративной культуре, чтобы побудить сотрудников обмениваться информацией и знаниями. Таким образом, система управления знаниями выходит за рамки простого структурирования информации и обеспечения доступа к ней.
На второй стадии в системах управления знаниями появляются “сообщества специалистов-практиков”. Ключевым событием, ознаменовавшим переход от первой стадии ко второй, стала конференция The Conference Board 1998 года, которую посетило значительное количество специалистов из HR-подразделений. А в 1999 году количество специалистов по управлению человеческими ресурсами среди посетителей конференции впервые превысило количество IT-специалистов.
Третья стадия: Систематика и управление контентом
Осознание важности контента, а точнее его систематизации (то есть упорядочения, описания и структурирования) положило начало третьей стадии. Организации осознали, что в информации нет никакого толку, если нет возможности быстро отыскать нужные данные при необходимости. Так на третьей стадии в системах управления знаниями появились термины “систематика” и “управление контентом”. Тема управления контентом впервые была затронута на конференции KMWorld в 2000 году, а в 2001 на той же конференции управление контентом стало одной из самых обсуждаемых тем. В 2006 году на конференции был учрежден двухдневный мастер-класс, посвященный систематике, который проводится и в настоящее время.
Проблемы систем управления знаниями
Одной из важный проблем современных систем управления знаниями является сохранение знаний пенсионеров. Вопрос обостряется тем, что большой пласт сотрудников, рожденных в послевоенный период бэби-бума, сейчас выходят на пенсию. Одной из возможных техник работы с пенсионерами является подход извлеченных уроков: карьерный путь пенсионера рассматривается как проект, и по нему составляется отчет. Однако в результате мы получим огромную свалку данных, которые будут полезны лишь в отдельных случаях.
Гораздо более эффективным представляется вовлечение пенсионеров в работу, поддержание с ними связи посредством сообществ специалистов, а также с помощью систем местонахождения компетенций. Настоящую ценность представляет не информация, которую способен оставить после себя работник, а знания, которые создаются при взаимодействии пенсионера с текущими сотрудниками организации. Возможен такой сценарий взаимодействия: пенсионер говорит: “Мне кажется, что…”, на что ему отвечает текущий сотрудник: “Да, но здесь…”. Таким образом рождается дискуссия, в ходе которой пенсионер передает свои знания и участвует в нахождении лучшего решения. То есть решение является не просто результатом знаний пенсионера, а скорее результатом взаимодействия работников.
Еще один скачок в развитии системы управления знаниями обусловлен новым современным взглядом на знания организации. Все чаще к системе управления знаниями относят весь поток информации и знаний, которые могут быть полезны организации, включая внешние знания: информацию от поставщиков товаров и услуг, клиентов и т.д.
Есть ли будущее у концепции управления знаниями?
Ответ очевиден: есть. Возьмем хотя бы результаты библиометрического анализа: просто посчитаем количество статей в бизнес-литературе, которые описывают те или иные концепции бизнеса. Большинство таких концепций быстро набирают популярность, достигают ее пика примерно за 5 лет, а потом их показатели почти так же стремительно падают.
Ниже приведены графики популярности трех модных в последние годы концепций:
Ситуация с управлением знаниями обстоит совершенно по-другому:
График показывает количество статей в бизнес-литературе с фразой “Knowledge Management” в заголовке.
Если добавить к этому списку статьи с аббревиатурой “KM” в заголовке, получим следующий график:
Цифры говорят о том, что управление знаниями — это не просто модное течение, у этой концепции есть будущее.
Если вам понравилась статья, дайте нам знать — нажмите кнопку Поделиться.
А если у вас есть идеи для полезных статей на тему электронного обучения — напишите нам в комментариях, и мы будем рады поработать над новым материалом.
Механические системы управления и их основные элементы
Оборудование и аппаратура управления. Основные элементы механической системы управления — рычаги, тяги, муфты и тормоза. В качестве первичных исполнительных органов машин с электрической и электрогидравлической системой привода используются серийные кнопки, тумблеры, выключатели. На подъемниках, как правило, эти элементы объединены в пульты управления рабочими положениями подъемника, которые устанавливаются на поворотной платформе и в люльке (рабочей плошадке). Обычно эти пульты (рис. 168,в) имеют одинаковую конструкцию и состав приборов управления. Блокировка управления сигнализирует, с какого пульта производится управление подъемником. [c.245]В станках с программным управлением имеются следующие основные системы механическая система, система управления, включающая элементы путевого контроля и приводы подачи, гидравлическая, пневматическая и электрическая системы, системы смазки и охлаждения. [c.131]
МЕХАНИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ И ИХ ОСНОВНЫЕ ЭЛЕМЕНТЫ [c.615]
В состав машин-автоматов входят различные устройства механического, гидравлического, пневматического, электрического и электромагнитного действия, а также счетно-решающие и кибернетические устройства. Независимо от назначения и устройства все машины-автоматы имеют общие структурные элементы, объединенные системой управления циклом. Можно выделить шесть основных групп структурных элементов 1) двигатели 2) передаточные механизмы 3) исполнительные механизмы 4) вспомога- [c.424]
В общем случае всякий код, применяемый в системах числового программного управления, складывается из двух основных элементов кода перемещений и кода вспомогательных команд. При этом способ кодирования в общей программе может быть различным для перемещений и вспомогательных команд. Так, например, заданные перемещения можно изображать комбинацией цифр (например, 1 и 0), а вспомогательные команды — технологические и логические — буквами. Однако проще всего механически или автоматически записывать и воспроизводить программу в том случае, если все команды будут закодированы 144 [c.144]
Система управления линии ЗИЛ в основном построена по рефлекторному принципу с программным устройством шагового действия (система ПШ). В данной системе каждая последующая команда управления подается после получения информации о полном завершении предыдущей операции, в результате чего барабан перемещается скачком на очередную позицию, и вырабатывается очередная команда. Информационные элементы контроля исполнения операций усложняют схему, но она остается проще, чем схема, построенная по принципу РК, поскольку в ней отсутствуют элементы запоминания. Эти функции выполняет механическая часть командоаппарата. [c.134]
При анализе надежности элементов автоматических линий необходимо выделить две специфические группы механические элементы, включающие в себя основные рабочие, транспортные и другие вспомогательные механизмы, и элементы системы управления. [c.135]
Характеристики управляемости вертолета могут быть улучшены применением автоматических систем управления. Для некоторых видов полетов, например для полета по приборам, автоматическая система улучшения устойчивости и управляемости необходима. Применение таких систем, естественно, усложняет конструкцию и увеличивает стоимость вертолета. Часто основным элементом автоматического управления вертолета является гироскоп. Поскольку сам несущий винт можно рассматривать как гироскоп, возможно использование управляющего гироскопа, который воспринимал бы те же инерционные силы, которые действуют и на несущий винт. Такая система управления может быть целиком механической, либо она может использовать гироскоп в качестве датчика, управляющие сигналы которого отрабатываются электрогидравлическими приводами. [c.776]
Основные понятия теории надежности носят универсальный характер и в принципе применимы к объектам самой различной природы и структуры. Эти объекты могут включать агрегаты, узлы, блоки, которые в свою очередь могут быть механическими, электрическими, химическими, биологическими и другими системами. Примером служит задача о надежности системы, состоящей из объекта управления, системы управления и человека-оператора. Практическое применение методов системной теории надежности для расчета ряда объектов связано с серьезными затруднениями. Сложный характер взаимодействия элементов и подсистем между собой, а также с окружающей средой, трудность или невозможность получения достаточной информации о показателях надежности элементов типичны для многих классов объектов, в том числе для большинства машин и конструкций (см. 1.3). Единственный путь для преодоления трудностей состоит в развитии направления теории надежности, которое естественным образом включает описание физических процессов взаимодействия объекта с окружающей средой, переход системы в неработоспособное состояние как физический процесс. При этом описание поведения объекта с точки зрения его работоспособности становится органически связанным с описанием процесса функционирования системы. [c.34]
Пусковое устройство. Основным элементом пускового устройства является воздушная заслонка 11, установленная во входном патрубке карбюратора. Управление заслонкой механическое из кабины водителя. При закрытии воздушной заслонки 11 для облегчения пуска происходит одновременное открытие дроссельных заслонок на небольшой угол, с тем чтобы разрежение из впускной системы двигателя передавалось в смесительные камеры карбюратора. Под действием этого разрежения в период пуска происходит интенсивное истечение топлива из системы холостого хода и основной дозирующей системы каждой камеры. Воздушная заслонка И имеет клапан 12 для впуска воздуха в камеры при резком увеличении разрежения. Последнее может иметь место после первых вспышек в цилиндрах или устойчивом пуске двигателя и переходом работы на холостой ход. Этим исключается возможность переобогащения смеси при пусках холодного двигателя. [c.285]
В общем случае всякий код, применяемый в системах числового программного управления, складывается из двух основных элементов кода перемещений и кода вспомогательных команд. При этом способ кодирования в общей программе может быть различным для перемещений и вспомогательных команд. Так, например, заданные перемещения можно изображать комбинацией цифр (например, 1 и 0), а вспомогательные команды (технологические и логические) — буквами. Однако проще всего механически или автоматически записывать и воспроизводить программу в том случае, если все команды будут закодированы с использованием одних и тех же условных знаков, например 1 и 0. Для этого достаточно условиться, что определенное сочетание единиц й нулей означает команду рабочая подача вперед , другое сочетание — команду включение подачи охлаждающей жидкости , третье сочетание — команду смена режущего инструмента и т. д. Поэтому большинство кодов, применяемых в системах числового программного управления, в том числе и так называемые буквенно-цифровые коды, являются по существу цифровыми кодами. [c.356]
Основными элементами системы управления являются клапаны различного типа, гидрораспределители, дроссели и другие регулирующие устройства, а также механические шарнирно-рычажные и другие системы, с помощью которых машинист управляет регулирующими устройствами. [c.39]
Таким образом, основным механизмом смешанной системы управления автоматическими линиями является командоаппарат, выдающий в заданной последовательности команды элементам привода, контролирующий их выполнение и отменяющий предыдущие команды перед подачей последующих. Командоаппарат может быть выполнен в виде специального электромеханического устройства с электрическим, гидравлическим или пневматическим приводом. В качестве командоаппарата может быть использован шаговый искатель, наконец, командоаппарат может быть выполнен на промежуточных реле с механической или магнитной памятью. [c.556]
Высокая степень резервирования бортовых систем самолета обеспечивает возможность посадки при повреждении одного двигателя, одного гидронасоса, основной электрической системы или механической проводки управления стабилизатором, а также при выходе из строя двух из четырех контуров гидросистемы. Размещение коробки приводов и насосов вдали от горячих участков двигательного отсека существенно снизило пожароопасность, разнесение агрегатов гидросистем в поперечном направлении и размещение между ними ВСУ и элементов конструкции самолета снизило вероятность одновременного выхода из строя обеих гидросистем при повреждении самолета. [c.103]
Робот состоит из трех основных частей чувствительных (сенсорных) элементов — датчиков механических рук и механизма перемещения — его кинематической структуры — эффектора системы управления, включающей орган, регулирующий действия робота (устройство программного управления или ЭВМ). [c.116]
Сравнивая структурную схему рассматриваемой двухканальной системы (рис. 6-15) со структурной схемой системы с силовым механическим дифференциальным редуктором (рис. 6-7) можно заметить, что отличия системы с суммированием воздействий в силовой части сводятся к следующему, первый (основной) СП двухканальной системы представляет собой систему с неединичной главной отрицательной обратной связью, в цепи этой связи имеется элемент с передаточной функцией С р) взаимовлияние каналов управления определяется лишь воздействием второго СП на выходную координату измерительного устройства основного канала силовой части составляющие угла поворота объекта регулирования ai i) и az(t) не могут быть измерены в реальной силовой части. [c.388]
Деформация и различные другие проявления механических свойств твердых тел являются результатом воздействия некоторых внешних, по отношению к данному элементу тела, факторов. В простейшем случае такими внешними факторами являются механические воздействия. Механические воздействия могут быть заданы, например, системой сил, напряжениями, перемещениями (прогиб, закручивание и т. д.) или работой, последнее чаще при ударных воздействиях. Механические напряжения могут быть вызваны и немеханическими воздействиями тепловыми, магнитными и др. Для оценки подобны.х воздействий на механические свойства их обычно выражают в напряжениях, например стеснение температурного расширения. Для понимания закономерностей деформации, разрушения и механических свойств и особенно для управления (регулирования) процессами деформации и разрушения необ.ходимо привлечение некоторых основных понятий и методов механики. [c.25]
Важным элементом процедуры является точное знание структуры системы, функций ее узлов, устройств управления как механических, так и электрических. Холодильная система не выносит формального отношения, необходим тщательный осмотр расположения трубопроводов и других основных узлов системы, что дает возможность изучения особенностей системы (размещение трубопроводов и соединений, например, больших устройств охлаждения и систем рассола). [c.89]
Контроллер КВ-1552 является новым типом контроллера, который имеет ряд конструктивных отличий от контроллеров КВ-16А-12, КВ-1501, КВ-1508, КВ-1509. Основными отличиями являются контактная система мостикового типа, подшипники качения в узлах трения контактных элементов, главного барабана и узла фиксации, управление главным барабаном осуществляется штурвалом, отсутствует зубчатая передача. Контроллер состоит из сварного корпуса 3, стальной крышки, главного 6 и реверсивного 4 барабанов, набора кулачковых шайб 7, реверсивной рукоятки 1 и штурвала 2. На вал главного барабана набирают кулачковые шайбы, посредством которых замыкаются и размыкаются в определенной последовательности контактные элементы 5. Позиции главного и реверсивного барабанов фиксируются насаженными на их валы храповиками 12. Фиксация храповика происходит на каждой позиции штурвала или реверсивной рукоятки специальным рычагом 10, фиксатором 9 и пружинами 8 и 11. Механическая блокировка исключает перемещение реверсивной рукоятки на ходовых позициях штурвала главного барабана и перемещение штурвала на нулевом положении реверсивной рукоятки. Это обеспечивается специальным фиксатором 9, расположенным между храповиками главного и реверсивного барабанов [c.207]
Структурная схема следящего привода с электродвигателем приведена на рис. 7. Здесь основной контур состоит из усилителя мощности УМ, двигателя Д, механического редуктора Р, согласующего двигатель с нагрузкой ИО, и датчика перемещения ДП, осуществляющего обратную связь по положению. Командный сигнал, поступающий от устройства управления, и сигнал датчика обратной связи ДП, вычитаясь в элементе сравнения, образуют сигнал ошибки, служащий для управления двигателем. Сигнал ошибки, пройдя корректирующее звено КЗ , суммируется алгебраически с сигналами обратной связи по скорости и ускорению. Для обратной связи по скорости используется тахогенератор Тг, сигнал обратной связи по ускорению принимается пропорциональным току якоря двигателя и поступает через корректирующее звено КЗ2. Такая система привода в состоянии реализовать оптимальное быстродействие, позволяя полностью использовать энергетические возможности двигателя в течение всего времени переходного процесса. [c.28]
На первых этапах для целей автоматизации управления технологическими процессами применялись лишь простые устройства — регуляторы (механические, электромеханические или электрические). Задача автоматизации сводилась в основном к обеспечению устойчивости регулируемых процессов. Впоследствии появились оптимальные регуляторы, способные при изменении внешних условий изменять значения регулируемых параметров для поддерживания процесса в наиболее выгодном режиме. Однако лишь с внедрением ЭВМ в промышленность появилось понятие автоматизированной системы управления технологическим процессом (АСУТП). Под автоматизированной системой управления технологическим процессом следует понимать человеко-машинный комплекс взаимосвязанных и взаимодействующих элементов, где на основе централизованного получения и комплескной обработки информации от указанных элементов и внешней среды вырабатываются управляющие воздействия для поддержания процесса в заданном режиме или для его централизованного изменения в соответствии с заданным алгоритмом управления. [c.378]
В качестве иллюстрации приведём на рис. 5.8 блок-схему однопозиционного оптического эхо-процессора, созданного в КФТИ КНЦ РАН. Основным его узлом является оптический квантовый генератор (ОКГ), состоящий из лазера накачки, системы формирования гармоник излучения и перестраиваемого лазера на красителе. Лазер накачки запускается от блока питания (БП ОКГ) с помощью системы управления (СУ) с частотой повторения 12,5 Гц. Излучение ОКГ проходит через нелинейный элемент (НЭ), призму Глана (Г), фазовую пластинку (ФП), оптический механических затвор (М31) и затем с помощью полупрозрачной пластинки (ПП) делится на два импульсных пучка. Первый [c.183]
Второй основной компонент СЧПУ-блок управления-состоит из электронной и другой аппаратуры, обеспечивающей считывание и интерпретацию команд управляющей программы и преобразование их в действия механических узлов станка. Типичные элементы обычного устройства ЧПУ-это считыватель перфоленты, буфер данных, каналы выдачи сигналов на станок, каналы обратной связи от станка и блок управления последовательностью действий для общей координации работы перечисленных элементов. Следует отметить, что почти все современные СЧПУ, имеющиеся сейчас в продаже, в качестве блока управления используют микроЭВМ. Этот тип ЧПУ называется машинным числовым программным управлением (МЧПУ). Системы МЧПУ будут рассмотрены в гл. 9. [c.155]
Газобаллонное оборудование системы Vialle состоит в основном из тех же элементов, что и механические системы с вакуумным управлением, но дополнено рядом элементов, что несколько повысило ее стоимость по сравнению с другими системами. [c.17]
Гидравлические механизмы обратной связи. Применение в системах с дистанционным управлением механической обратной связи усложняет конструкцию узлов и увеличивает число шарнирных соединений. Ввиду этого во многих случаях целесообразно применение гидравлической обратной связи, которая позволяет монтировать исполнительный гидродвигатель на возможно близком расстоянии от выходного элемента, создающего нагрузку. Схема гидравлического механизма обратной связи показана на фиг. 284. Входной элемент (ручка) присоединяется к плунжеру 1 золотника, корпус 2 которого связан с поршнем 4 вспомогательного цилиндра 3 системы обратной связи, последовательно включенного в трубопровод, соединяющий основной силовой цилиндр 5 гидроусилителя с золотником. При перемещении золотника вправо жидкость под давлением поступает в левую полость силового цилиндра 5 усилителя, из противоположной полости которого равное количество жидкости под низким давлением вытесняется во вспомогательный цилиндр 3 системы обратной связи. Поскольку корпус вспомогательного цилиндра 3 закреплен, его поршень 4 и соединенный с ним корпус 2 золот- [c.422]
В связи с тем, что оптические сигналы, отображающие коррелирующие функции в плоскостях Pia И Pjb, не могут быть отрицательными, знакопеременные коррелирующие функции необходимо записывать с использованием некоторого постоянного уровня смещения. Этот уровень смещения удаляется затем с помощью режекторного фильтра постоянной составляющей, устанавливаемого в частотной плоскости Рз коррелятора. Хотя описываемый коррелятор долгое время использовался с применением записи входных данных на ютопленке в плоскости Pia и синхронизируемой лентопротяжки в плоскости Pjb, однако необходимость в механическом перемещении фотопленки ограничивает быстродействие и точность данного коррелятора. Поскольку этот коррелятор в основном является системой формирования изображения, требования к точности установки его элементов, а также требования к степени когерентности используемого излучения существенно ниже, чем в корреляторе с частотной плоскостью. Схема описанного коррелятора представляет большой интерес, поскольку в нем для управления с высокой точностью перемещением одного сигнала относительно другого можно применять акустооптические ячейки (что с успехом и применялось в плоскости Pi ). В следующем разделе мы обсудим этот и другие типы акустооптических корреляторов. Акустооптические корреляторы имеют такие преимущества, как быстродействие и широкая полоса пропускания, но их можно использовать лишь для обработки одномерных сигналов. [c.573]
Основные достоинства гидравлических устройств легкость получения больших сил зажатия при малых размерах и весе механизмов малые силы (и моменты) инерции гидравлических механизмов по сравнению с другими приводами возможность получения плавных движений рабочих элементов зажимов возможность частьСК и быстрых переключений при возвратно-поступательных и вращательных движениях отсутствие громоздких механических передач, подверженных значительному износу самосмазываемость гидравлических механизмов рабочей жидкостью простота и удобство управления возможность применения в гидравлических системах стандартных узлов и механизмов. [c.72]
На основании таких расчетных схем определяются динамические коэффициенты д, которые учитываются при расчете соответствующих элементов машин. Следует заметить, что значения динамических коэффициентов, полученных расчетом по приведенным схемам, являются приближенными, так как в этом случае не учитывается влияние на динамические процессы привода. Известно, что внещияя характеристика привода зависит как от рода двигателя и его управления, так и от механических характеристик упругой системы рассматриваемого механизма. Поэтому при более точных определениях динамических коэффициентов следует рассматривать полную схему, включая и привод. Кроме того, из экспериментальных натурных исследований предварительно должны быть получены основные параметры, характеризующие граничные условия расчетной схемы. [c.70]
Основными возмущающими воздействиями на двигатель следует считать возникающие в тракте рабочего тела возмущения, обусловленные турбулентным характером течений и механическими колебаниями элементов конструкции системы подачи. Анализ экспериментальных данных показал, что спектр этих возмущений лежит в диапазоне средних частот (практически до 2 Гц, а основная часть спектра меньше 1 Гц). Такие возмущения оказывают существенное влияние па работу сравнительно малоинерциопного контура управления тягой. [c.144]
3. Интеллектуальные системы управления робототехническими комплексами финишной обработки сложнопрофильных изделий ГТД.
Рис. 3.5. Интеллектуальная технологическая система управления робототехническим комплексом
Рис. 3.6. Структурная схема интеллектуальной технологической системы управления.
Интеллектуальная экспертная система строится на основе правил (таблица 1). В качестве правил рассматривается набор обязательных действий, которые проверяются и корректируются на основе информации систем контроля о характеристиках обрабатываемой детали и исполнительной системы. На основании этого формируется программа обработки конкретной лопатки.
Таблица 1.Набор правил для интеллектуальной экспертной системы
|
№№ п/п |
Правила для экспертной системы, выполняющей финишную обработку пера лопаток |
Критерии оценки выполнения этапов экспертной системой |
Результаты выполнения этапов экспертной системой |
|
1
|
Измерение геометрических параметров обрабатываемой поверхности заготовки |
Минимизация погрешностей измерения |
Геометрические параметры обрабатываемой поверхности заготовки |
|
2
|
Вписание готовой детали в параметры заготовки |
Минимизация припусков на обработку |
Геометрические параметры обработанной поверхности готовой детали, соответствующие анализируемой заготовке |
|
3
|
Построение эквидистантных оболочек |
Минимизация количества проходов инструмента |
Карта распределения припусков, значения эквидистантных расстояний, глубины резания. |
|
4
|
Построение зон черновой и чистовой обработки на обрабатываемой поверхности |
Минимизация площади обрабатываемых поверхностей черновой обработки для выбранных припусков |
Построенные границы зон черновой и чистовой обработки |
|
5
|
Назначение черновых и чистовых траекторий обработки |
Минимизация времени на обработку |
Массив траекторий для черновой и чистовой обработки |
|
6
|
Назначение режимов черновой и чистовой обработки |
Максимальная производительность, обеспечивающая допустимые погрешности получения готовой детали |
Закон изменения подачи, допустимые скорости резания, |
|
7
|
Проверка сформированных законов движения на комплексной модели процесса обработки |
Контроль допустимых погрешностей на размеры обрабатываемой поверхности детали |
Погрешности отработки траекторий движения инструмента |
|
8
|
Корректировка сформированных законов движения инструмента по обрабатываемой поверхности |
Правила корректировки законов движения |
Погрешности отработки траекторий движения инструмента |
Работа выполняется совместно с филиалом НИИД АО «НПЦ газотурбостроения «САЛЮТ», ОИВТ РАН.
В рамках работ по созданию основ проектирования интеллектуальных систем управления робототехническими комплексами для операций финишной обработки сложнопрофильных изделий получены следующие научные результаты
1. Разработана структура интеллектуальной экспертной системы построенной на основе правил
2. Предложены основные правила и критерии их выполнения применительно к интеллектуальной технологической системы для обработки сложных поверхностей пера лопаток ГТД
3. Разработана методика построения динамической модели технологической системы, входящей в состав экспертной системы и включающей исполнительные манипуляционные системы совместно с приводами, оптическую систему контроля и модель технологического процесса
4. Разработана методика, алгоритмическое и программное обеспечение имитирующее работу экспертной систему на динамической модели, встраиваемой в экспертную систему (имитирующей работу эксперта), и принятие решения о выборе программы обработки на основе данной проверки.
Перспективные исследования направлены на:
- использование неоднозначности решения обратной задачи о положении (избыточности) для расширения технологических возможностей манипуляторов;
- уменьшение погрешности обработки от статической податливости и неточности изготовления звеньев;
- увеличение производительности обработки: за счёт кривизны поверхностей (инструмента и изделия) и скорости движения по траектории;
- анализ разработки рекомендаций для новых кинематических схем манипуляторов при выполнении операций формообразования сложных поверхностей.
Система управления знаниями
1. Базы извлеченных уроковВ базу извлеченных уроков БД попадают тот опыт и те знания, которые были зафиксированы и могут быть доступны сотрудникам компании, однако в рамках стандартных процедур не могут быть задокументированы должным образом. В процессе управления знаниями крайне важно делать ставку на знания и данные, предоставляемые основными участниками деятельности организации. Этот процесс дает возможность превратить неявные знания в явные. «Извлеченные уроки» представляют собой знания, которые были получены в ходе практической деятельности компании.
Прекрасным примером извлеченных уроков может стать ситуация, о которой часто вспоминает в ходе консультирования и выступлений американский консультант по управлению знаниями Марк Мацци. В 2003 году он рассказал об опыте работы в компании, специализирующейся на фармацевтических препаратах. Компания Wyeth, в которой работал Марк, представила рынку новый препарат для детей. Его особенностью было то, что принимать препарат предполагалось один раз в день, что было комфортно для детей, которые находятся на лечении, и их родителей. Ожидалось, что продажи препарата будут максимально высоки. Однако вскоре после выхода нового лекарства уровень его продаж стал падать. Продавцы, имеющие возможность постоянно общаться с потребителями, узнали, что дети отказывались от приема нового лекарства из-за его неприятного вкуса. Благодаря полученным знаниям, специалисты компании Wyeth быстро сориентировались и приняли решение: принимать препарат только с апельсиновым соком, который мог замаскировать его вкус. Продавцы стали предупреждать об этом и родителей, и покупателей, и лечащих врачей. И это решение позволило восстановить уровень продаж и поднять его на ожидаемый уровень.
2. Выбор местонахождения компетенций
Поскольку основная масса знаний компании находится в головах компетентных в конкретных областях специалистов, наиболее простой путь к получению этих знаний состоит в получении консультаций у этих специалистов. Однако найти необходимого эксперта не всегда оказывается просто.
Обеспечить систему местонахождения компетенций в базе знаний компании можно по нескольких направлениям:
- Поиск компетенций по данным, которые работники компании указывают в своих резюме при поступлении на ту или иную должность.
- Поиск компетенций по данным, которые сотрудники компании указывают в процессе собственной оценки знаний и навыков (может осуществляться в виде анкетирования).
- Поиск компетенций в процессе анализа входящих и исходящих коммуникаций сотрудников. Анализировать при этом можно не только вербальную коммуникацию, но и активность работников в социальных сетях.
3. Сообщества специалистов-практиков
Сообщества данного типа представляют собой группы специалистов, которые имеют схожие интересы и проводят реальные (личные) и виртуальные сборы в целях обсуждения проблем по конкретным узкоспециализированным вопросам, обмена знаниями и опытом, обсуждения интересных извлеченных уроков и лучших практик. Сообщества специалистов делают ставку на социальную природу обучения сотрудников в компании.
Еще пару десятков лет тому назад одним из способов социального обучения можно было назвать «разговоры у кулера с водой» или «кофе-брейки» специалистов, во время которых можно было проговорить проблемы, обсудить пути их решения. Сегодня часто случается так, что сотрудники одной и той же компании могут находиться в разных филиалах, городах, странах. Возникает необходимость в создании комфортной среды для виртуального общения. В процессе внедрения систем управления знаниями стали активно использоваться электронные каналы для коммуникации специалистов: закрытые сообщества, группы в социальных сетях, скайп-чаты и пр.
Система управления двигателем
12.05.2010
Система впрыскивания топлива
Система впрыскивания топлива состоит из трех подсистем, которые, работая вместе, управляют процессом сгорания и обеспечивают обратную связь по рабочей эффективности. Эти подсистемы:
1. Воздухозабор
2. Подача топлива
3. Управление расходом топлива
Система воздухозабора обеспечивает подачу воздуха, необходимого для процесса сгорания, и измеряет количество воздуха, входящего в двигатель. Типичные элементы включают в себя воздухозаборник, воздушный фильтр, впускные каналы, измеритель (или датчик) расхода (или массы) воздуха и другие специальные элементы системы воздухозабора.
Система подачи топлива подает бензин из топливного бака, фильтрует его и подает под высоким давлением к двигателю. В число элементов системы входит топливный насос, топливный фильтр, топливный коллектор, топливные форсунки, регулятор давления и гаситель пульсаций. На двигателях с замкнутым топливным контуром система также включает в себя топливопровод, который возвращает неиспользованное топливо в бак (возвратный топливопровод).
В системе управления расходом топлива имеются входные датчики, которые выполняют непрерывные измерения и передают эту информацию к компьютеру управления двигателем. Компьютер определяет количество топлива для впрыскивания и использует выходные исполнительные устройства для активизации топливных форсунок на точный промежуток времени. Работа компьютера управления двигателем более подробно обсуждается дальше.
Компьютер делает несколько тысяч вычислений в минуту и постоянно регулирует количество топлива по мере изменения условий движения. Эти процессы идут непрерывно с момента запуска двигателя. Впрыскивание топлива основывается на чрезвычайно точном измерении количества впускаемого воздуха. Любой сбой, который не позволит получить эту информацию, приведет к тому, что компьютер даст неверную оценку параметров впрыскивания топлива.
Компьютер вычисляет количество впрыскиваемого топлива, основываясь на получаемых им входных сигналах, сообщающих о расходе воздуха, его массе и температуре воздухозабора.
Система управления двигателем
Система управления двигателем управляется бортовым компьютером, который различными изготовителями называется по разному. Ниже даются два самых распространенных названия этого компьютера:
• Модуль управления силовым агрегатом (РСМ)
• Модуль управления двигателем (ЕСМ)
В настоящей публикации контроллер двигателя упоминается, как РСМ.
РСМ — это сердце современной системы управления двигателем. Он управляет системой зажигания, системой впрыскивания топлива и другими элементами. РСМ предназначается для увеличения эффективности двигателя и уменьшения токсичности отработавших газов
РСМ сохраняет стехиометрическое соотношение «воздух / топливо» в условиях движения с экономичной скоростью. Однако, условия движения изменяются, и стехиометрическая воздушно-топливная смесь не будет идеальной для всех условий. В зависимости от рабочих условий РСМ делает воздушно-топливную смесь более богатой или более бедной.
РСМ получает информацию от входных датчиков и посылает управляющие сигналы соответствующим выходным устройствам, таким как топливные форсунки. Расположение РСМ и датчиков зависит от модели и изготовителя. За информацией по расположению элементов всегда обращайтесь к Руководству для станций технического обслуживания.
Входные устройства РСМ
Входные датчики непрерывно подают подробную информацию, связанную с различными аспектами работы автомобиля. В следующем разделе описываются датчики, характерные для современных систем управления силовым агрегатом.
Сигнал импульса зажигания
РСМ получает сигнал импульса зажигания от катушки зажигания и на основании этого сигнала задает количество и опережение впрыскивания топлива.
Датчик температуры охлаждающей жидкости двигателя
Более богатые воздушно-топливные смеси компенсируют плохую испаряемость топлива при низкой температуре. РСМ контролирует температуру охлаждающей жидкости и увеличивает объем впрыскивания топлива, чтобы улучшить общие динамические характеристики автомобиля при холодном двигателе.
Датчик температуры охлаждающей жидкости двигателя (ЕСТ) измеряет температуру охлаждающей жидкости по изменению электрического сопротивления. Терморезистор изменяет свое электрическое сопротивление в соответствии с изменением температуры.
Датчик температуры воздухозабора
Датчик температуры воздухозабора (IAT) — это терморезистор. Он располагается в системе воздухозабора двигателя и служит для определения температуры входящего воздуха. Датчик IAT подает сигнал напряжения, изменяющийся в зависимости от сопротивления. Сопротивление датчика и результирующее напряжение датчика высокие, когда датчик холоден. При повышении температуры сопротивление и напряжение датчика уменьшаются.
Датчик положения коленчатого вала (СКР)
РСМ использует частоту вращения коленчатого вала двигателя, чтобы помочь задать базовое количество впрыскивания. Датчик положения коленчатого вала (СКР) может располагаться на коленчатом вале или внутри распределителя.
Около датчика быстро вращается специальный ротор (импульсное колесо), снабженный выступами или зубьями и расположенный на коленчатом вале. Датчик регистрирует изменение напряженности магнитного поля при каждом прохождении выступа рядом с ним.
Датчик частоты вращения коленчатого вала двигателя
Датчик частоты вращения коленчатого вала двигателя, установленный в распределителе, или датчик угла поворота коленчатого вала может быть дискового типа или устройством, работа которого базируется на эффекте Холла.
В датчике дискового типа используется диск с прорезями, установленный на вале распределителя, два светодиода и два фотодиода. Один светодиод указывает на угол поворота коленчатого вала, в то время как второй светодиод указывает на положение цилиндра.
Датчик положения распределительного вала (СМР)
РСМ использует датчик положения распределительного вала (СМР) для отслеживания положения всех цилиндров и управления топливной системой и системой зажигания. Датчик регистрирует положение в.м.т. на ходе сжатия для цилиндра 1 1 и может располагаться в распределителе или около распределительного вала. Датчик СМР регистрирует изменения напряженности магнитного поля, вызванные выступами на шкиве распределительного вала.
Датчик скорости автомобиля
Датчик скорости автомобиля (VSS) указывает скорость движения автомобиля. Имеются три распространенных типа датчика VSS — датчики типа герконового реле и типа оптропары находятся в спидометре, а датчик электромагнитного типа находится на вторичном вале коробки передач.
Некоторые изготовители автомобилей для получения информации о скорости автомобиля также используют датчик скорости колеса, который является частью антиблокировочной системы тормозов.
Кислородные датчики
Передний кислородный датчик измеряет плотность кислорода в отработавших газах и подает соответствующий сигнал к РСМ. Передний кислородный датчик располагается перед каталитическим нейтрализатором. РСМ использует входной сигнал от переднего кислородного датчика для расчета изменений в соотношении «воздух/ топливо».
Кроме того, имеется и задний кислородный датчик, устанавливаемый за каталитическим нейтрализатором. РСМ сравнивает сигналы от двух кислородных датчиков для контроля эффективности каталитического нейтрализатора и определения,правильно ли работает каталитический нейтрализатор.
Датчик положения дроссельной заслонки (TPS)
Датчик положения дроссельной заслонки (TPS) -это варистор (потенциометр), установленный на дроссельной заслонке. Корпус дроссельной заслонки открывается и закрывается посредством троса, который соединяется с педалью акселератора. Когда дроссельная заслонка закрыта, компьютер снимает сигнал низкого напряжения. Когда дроссельная заслонка широко открыта, компьютер снимает сигнал высокого напряжения.
Датчик массового расхода воздуха/ расхода воздуха
Датчик массового расхода воздуха (MAF) измеряет объем и плотность входящего воздуха. При выполнении измерений датчик MAF способен принимать во внимание температуру, плотность и влажность воздуха. Все эти параметры, взятые вместе, определяют «массу» входящего воздуха. Компьютер использует информацию о фактическом массовом расходе воздуха, что помогает рассчитывать соотношение «воздух/топливо».
Прочие входные устройства
В зависимости от изготовителя автомобиля имеется несколько других входных устройств. В число прочих входных устройств могут входить следующие:
• Датчик абсолютного давления во впускном коллекторе (MAP) — измеряет изменения в давлении воздуха во впускном коллекторе.
• Датчик детонации — посылает РСМ сигнал на уменьшение угла опережения зажигания в случае повышенной детонации.
• Переключатель парковочной передачи/нейтрального положения (P/N) — сообщает РСМ, находится ли коробка передач в положении ПАРКОВОЧНОЙ передачи или в НЕЙТРАЛЬНОМ положении или на одной из передач движения.
• Реле давления усилителя рулевого управления (при частоте вращения коленчатого вала в режиме холостого хода) — используется для регистрации высокого давления рабочей жидкости в системе усилителя рулевого управления.
• Реле высокого давления А/С — посылает к РСМ «запрос» на включение А/С, чтобы РСМ мог включить компрессор А/С.
• Переключатель круиз-контроля — когда РСМ получает сигнал круиз-контроля, он сохраняет желаемое значение скорости в памяти, что позволяет обеспечить сохранение этой скорости.
Выходные исполнительные устройства открывают и закрывают клапаны, впрыскивают топливо и выполняют другие задачи, реагируя на управляющие сигналы, поступающие от РСМ. Некоторые исполнительные устройства управляются, в то время как другие просто включаются или выключаются. Отрезок времени, в течение которого работает исполнительное устройство, — это его рабочий цикл. РСМ управляет рабочими циклами и в зависимости от необходимости может или удлинять или сокращать их.
Топливные форсунки
Топливо подается к двигателю посредством топливных форсунок. Топливными форсунками управляет РСМ. Непрерывная подача топлива под давлением в топливную форсунку выполняется топливным насосом. Топливная форсунка — это электромагнитный клапан, который активизируется при обеспечении компьютером электрической цепи на «массу», и после этого топливо под давлением «впрыскивается» во впускной коллектор. Компьютер управляет расходом топлива посредством широтно-импульсной модуляции времени включенного состояния форсунки. Время включенного состояния форсунки определяется комбинацией ранее описанных входных сигналов РСМ.
Клапан управления подачей воздуха в режиме холостого хода
Клапан управления подачей воздуха в режиме холостого хода (IAC) располагается в корпусе дроссельной заслонки. Клапан IAC состоит из подвижной иглы, которая управляется маленьким электродвигателем, называемым шаговым электродвигателем. Шаговый электродвигатель способен перемещаться, выполняя очень точные, отмеренные «шаги». Компьютер использует клапан IAC для управления частотой вращения коленчатого вала в режиме холостого хода. Клапан IAC изменяет положение иглы в канале воздуха холостого хода в корпусе дроссельной заслонки. Тогда характер потока входящего воздуха около дроссельной заслонки, когда она закрыта, изменяется.
Электрический топливный насос
В большинстве систем впрыскивания топлива используется встроенный в бак, управляемый реле электрический топливный насос. Когда включается переключатель зажигания, компьютер, прикладывая напряжение аккумулятора, возбуждает реле, которое управляет топливным насосом. Реле остается включенным до тех пор, пока двигатель не начнет проворачивать двигатель или последний не начнет работать и компьютер не получит базовые импульсы. Если базовые импульсы отсутствуют, компьютер выключает реле.
Электрический вентилятор охлаждения
При определенных условиях, для охлаждения радиатора и/или конденсатора А/С, используются одиночные или двойные электрические вентиляторы охлаждения. На большинстве вариантов вентиляторы охлаждения управляются РСМ. В вариантах с компьютерным управлением используются реле вентилятора охлаждения. Компьютер обеспечивает заземление реле вентилятора охлаждения на «массу», подавая напряжение системы к электродвигателю вентилятора охлаждения при соблюдении некоторых или всех нижеперечисленных условий:
• Датчик температуры охлаждающей жидкости указывает высокую температуру охлаждающей жидкости
• Запрашивается включение системы А/С • А/С включена, а скорость автомобиля ниже заданной
• Давление на стороне высокого давления А/С выше заданного значения, возможно размыкание реле высокого давления
Контрольная лампа неправильной работы
Контрольная лампа необходимости обслуживания двигателя или контрольная лампа неправильной работы (MIL) горит, когда ключ зажигания поворачивается во включенное положение (ON) при неработающем двигателе. Не волнуйтесь по этому поводу, потому что это только быстрая проверка лампы. Когда двигатель работает, обычно MIL не горит. Если в памяти сохраняется код неисправности, или компьютер входит в резервный режим, MIL загорается, что означает наличие заземления компьютером электрической цепи MIL. Если состояние изменяется и код (или коды) неисправности больше не присутствуют, лампа может погаснуть, но код остается в памяти компьютера.
Бортовая диагностика
РСМ содержит диагностическое программное обеспечение, которое контролирует работу автомобиля и регистрирует возникающие неисправности. Это программное обеспечение именуется бортовой диагностикой (OBD).
В 1994 году изготовители начали оборудовать автомобили РСМ, содержащими систему бортовой диагностики второго поколения (OBD II) или EOBD для Европы. Программное обеспечение контролирует те параметры в системах впрыскивания топлива и понижения токсичности выхлопа, которые могут вызвать рост токсичности выхлопа. В дополнение к проверке на наличие неисправности элементов, OBD II проверяет и тестирует правильность работы подсистем. Кроме того, она следит за ухудшением работы датчиков и исполнительных устройств.
Управление регулятором давления топлива
В некоторых двигателях РСМ увеличивает давление топлива, чтобы предотвратить образование «паровой пробки» (закипания), когда температура двигателя при повторном запуске высока. Например, если температура охлаждающей жидкости при запуске равняется 212°F (100 °С) или выше, РСМ активизирует электромагнитный клапан управления регулятором давления.
Когда электромагнитный клапан работает, подача вакуума к регулятору давления уменьшается, заставляя давление топлива становиться выше чем для обычных рабочих условий двигателя. Электромагнитный клапан остается активизированным в течение короткого времени после запуска двигателя.
Система базового холостого хода
Байпас позволяет некоторому количеству впускаемого воздуха входить во впускной коллектор при работе двигателя в режиме холостого хода, потому что дроссельная заслонка почти полностью закрыта. Клапан IAC управляет «байпасным» воздухом, необходимым для стабилизации частоты вращения коленчатого вала в режиме холостого хода при различных нагрузках (А/С, электрическая нагрузка, усилитель рулевого управления и т.д.). Клапан IAC, который является исполнительным устройством электромагнитного типа, активизируется РСМ. Этот клапан обеспечивает точное управление количеством воздуха, который обходит дроссельную заслонку.
В некоторых автомобилях для управления базовым холостым ходом используется комбинация из двух клапанов: механического и электромагнитного. При запуске из холодного состояния открыты оба клапана, что обеспечивает дополнительное поступление воздуха при запуске и прогреве. По мере увеличения температуры охлаждающей жидкости до нормальной, механический клапан постепенно закрывается, а воздух проходит только через электромагнитный клапан.
Так же рекомендуем прочитать Вам интересную статью Кузовные детали
Что такое система управления? — Определение с сайта WhatIs.com
КСистема управления — это набор механических или электронных устройств, которые регулируют другие устройства или системы посредством контуров управления. Обычно системы управления компьютеризированы.
Системы управления — центральная часть промышленности и автоматизации. Типы контуров управления, которые регулируют эти процессы, включают системы промышленного управления (ICS), такие как диспетчерский контроль и сбор данных (SCADA), и распределенные системы управления (DCS).
Системы управления используются для повышения производительности, эффективности и безопасности во многих областях, в том числе:
- Сельское хозяйство
- Химические заводы
- Целлюлозно-бумажные комбинаты
- Контроль качества
- Устройство управления котлом и электростанция
- Атомные электростанции
- Экологический контроль
- Водоочистные сооружения
- Очистные сооружения
- Пищевая промышленность
- Металлы и рудники
- Фармацевтическое производство
- Сахароперерабатывающие заводы
Существует два основных типа контуров управления: открытые контуры, которые работают с участием человека, и замкнутые контуры, которые полностью автономны.Некоторые петли можно переключать между закрытым и открытым режимами. В разомкнутом состоянии переключаемый контур управляется вручную, а в замкнутом — полностью автоматизирован.
Программируемые логические контроллеры (PLC), программируемые контроллеры автоматизации (PAC), удаленные оконечные устройства (RTU), серверы управления, интеллектуальные электронные устройства (IED) и датчики — это некоторые из элементов контуров управления, которые, в свою очередь, являются частью систем управления . Контуры управления, составляющие системы управления, обычно состоят из датчика, контроллера и конечного элемента управления.Датчик считывает переменную процесса или соответствующее измерение. Контроллер получает сигнал от датчика, а затем направляет его в контрольно-измерительные приборы, на удаленные оконечные устройства и на конечные элементы управления, где регулируется параметр процесса, чтобы поддерживать его постоянным на уровне, известном как уставка.
Последнее обновление: декабрь 2017 г.
Продолжить чтение о системе управленияСистемы управления и контуры управления: что это такое и когда их использовать
Некоторых может немного смутить термин «система управления».Быстрый поиск в Интернете дает много информации о ПИД-регуляторах и других подобных устройствах. В некотором смысле это имеет смысл, поскольку они наиболее широко используются в теории управления. Однако PID — это метод, используемый для управления системой, а не самой системой.
Что такое система управления?
Система управления — это набор механических и / или электронных устройств, которые регулируют, управляют и управляют другими устройствами или системами, использующими контуры управления.
Это определение имеет смысл, если вы знаете, что такое контур управления.Но не волнуйтесь. Мы здесь, чтобы прояснить все для вас, поэтому давайте определим контур управления.
Контуры управления
Контур управления состоит из всех физических компонентов и функций управления, необходимых для регулировки или поддержания значения измеряемой переменной процесса (PV) на желаемом уровне или заданном значении (SP). Для этого вашему циклу необходимы как минимум три основных элемента — вход, контроллер и выход.
Есть два типа контуров управления: открытый и закрытый.
Система без обратной связи
В качестве простейшего типа контура управления система без обратной связи не измеряет переменные и не отправляет выходные значения в контроллер.
Возьмем, к примеру, тостер. Когда вы кладете ломтик хлеба в тостер, вы устанавливаете число, ваш ввод, который показывает, как долго вы хотите, чтобы ломтик нагрелся. Тост, ваш продукт, может получиться от слегка подрумяненного до очень хрустящего, в зависимости от выбранного вами количества. Обратите внимание, что ни один датчик не измеряет цвет вашего хлеба или его хрусткость, поэтому вы не узнаете о состоянии ломтика, пока тостер не закончит работу. Если вы установите слишком большое число, тосты подгорит.
Еще одна распространенная система с открытым контуром, немного более сложная, чем тостер, — это стиральная машина.Когда вы устанавливаете режим стирки и включаете машину, она рассчитывает время до пробега в зависимости от веса одежды внутри. Он также управляет рядом устройств: двигателем для вращения барабана, насосами или клапанами для добавления воды или моющего средства и так далее. Однако ничто не определяет, была ли ваша одежда очищена или просто намокла.
Замкнутая система
Теперь, когда мы знаем, как работает система управления без обратной связи, мы перейдем к системе с обратной связью. Основное различие между двумя системами — обратная связь.
В системе с обратной связью у вас есть датчик, который постоянно контролирует ваш выход. Этот датчик передает данные обратно в контроллер. Используя эти данные, контроллер сравнивает выходную мощность с вашей уставкой. Если это сравнение не совпадает, контроллер анализирует эту ошибку, используя один из методов контроля. Затем он отправляет сигнал на привод, чтобы изменить значение процесса и приблизить его к заданному значению.
Если вы водите машину, значит, вы использовали эту систему. Представьте, что вы хотите перейти из пункта А в пункт Б так быстро, как это позволяет закон.На вашем маршруте установлено ограничение скорости 60 миль в час, поэтому вы хотите поддерживать скорость автомобиля на уровне 60.
Здесь ваши глаза (датчик) отслеживают скорость автомобиля по спидометру (выходной сигнал). Если вы не достигли заданного значения, ваш мозг (контроллер) скажет вам нажать педаль газа (последний элемент управления) дальше вниз ногой (исполнительный механизм). Когда вы достигнете 60, вы сможете поддерживать такую скорость.
Все отлично работает, если вы не сталкиваетесь с помехами, такими как холм.Если вы подниметесь в гору, ваша скорость снизится, если вы не измените положение ноги.
Как только ваша скорость снижается, ваш мозг анализирует эту ошибку и регулирует вашу ногу. Однако, если вы взойдете на вершину холма, не перенастроив ногу, вы можете набрать скорость, что также является ошибкой. Затем вы следите за своей скоростью и снова настраиваете. Этот процесс повторяется каждый раз, когда в вашей системе возникает сбой.
RTA421 Концевой выключатель с питанием преобразователя для контроля сигналов тока или напряжения
АСУ ТП
Несмотря на то, что вначале мы определили систему управления, мы говорили о контурах, а не о системе.В отрасли вы встретите в основном системы управления с обратной связью, поскольку для большинства процессов необходимо поддерживать желаемые значения.
Система управления с обратной связью — это полный комплект оборудования и логики, лежащих в основе процесса, включая программное и аппаратное обеспечение, необходимое для управления всеми параметрами вашего процесса:
- Полевые инструменты для мониторинга ваших PV и отправки данных на ваш контроллер.
- Контроллер для подключения всех входов и выходов вашей системы.
- Программирование и кодирование для анализа и хранения данных с последующей отправкой сигналов конечным элементам управления.
- Человеко-машинный интерфейс (HMI) для отображения данных с поля в понятной для людей форме.
- Приводы, устройства, которые изменяют ваши фотоэлектрические системы, такие как насосы, клапаны и тепловые системы.
- Полевая связь, которая включает в себя все типы проводки и протоколы (стандартные «языки», на которых взаимодействуют контроллер и полевые устройства).
Заключение
У нас есть системы управления в таких простых устройствах, как тостер, или в таких сложных промышленных процессах, как на нефтеперерабатывающем заводе.Сложность системы будет зависеть от решаемых вами задач.
Для простых повседневных задач иногда достаточно системы управления без обратной связи. Для более сложного мониторинга и автоматизации вам обязательно следует использовать системы с обратной связью.
Найдите и купите контроллеры в нашем интернет-магазине
Чтобы узнать больше о системах управления, свяжитесь с нашими инженерами!
Система управления процессами— обзор
4.1.2 Объединение данных технического обслуживания и контроля
Системы управления процессами, например, используемые в нефтегазовой, целлюлозно-бумажной или других обрабатывающих отраслях, обычно включают одну или несколько централизованный или децентрализованный контроллер процесса, коммуникативно связанный по меньшей мере с одним хостом или рабочей станцией оператора и с одним или несколькими устройствами управления технологическим процессом и контрольно-измерительными приборами, такими как полевые устройства.Эти устройства, например, клапаны, переключатели и датчики, выполняют функции в рамках процесса, такие как открытие или закрытие клапанов и измерение параметров процесса.
Контроллер процесса принимает сигналы, указывающие на измерения процесса или переменные процесса, сделанные полевыми устройствами или связанные с ними, и / или другую информацию, относящуюся к полевым устройствам. Он использует эту информацию для реализации программы управления, а затем генерирует управляющие сигналы, которые отправляются по одной или нескольким шинам на полевые устройства для управления работой процесса.Информация от полевых устройств и контроллера обычно предоставляется одному или нескольким приложениям, выполняемым рабочей станцией оператора; это позволяет оператору выполнять желаемые функции в отношении процесса, такие как просмотр текущего состояния процесса, изменение работы процесса и т. д. В то время как типичная система управления технологическим процессом имеет множество устройств управления технологическим процессом и контрольно-измерительных приборов, таких как клапаны , преобразователи, датчики и т. д., подключенные к одному или нескольким контроллерам процесса с программным обеспечением, которое управляет этими устройствами во время работы процесса, многие другие вспомогательные устройства необходимы для работы процесса или связаны с ней.
Эти дополнительные устройства включают оборудование для электроснабжения, оборудование для производства и распределения электроэнергии, вращающееся оборудование и т. Д., Расположенные во многих местах на типичном предприятии. Это оборудование не обязательно создает или использует переменные процесса, и во многих случаях оно не контролируется и даже не связано с контроллером процесса с целью воздействия на процесс. Тем не менее, это важно и в конечном итоге необходимо для правильной работы процесса. Однако в прошлом диспетчеры процессов не обязательно знали об этих других устройствах или просто предполагали, что они работают должным образом.На рис. 4.2 показан вентилятор, контролируемый двумя акселерометрами таким образом, что информация, генерируемая вибрациями, может замкнуть контур и подключить устройство к системе управления (Galar et al., 2012a).
Рисунок 4.2. Мониторинг вентилятора и его интеграция в контур управления. CM , мониторинг состояния; PLC , программируемый логический контроллер; SCADA , диспетчерский контроль и сбор данных.
По материалам Galar, D., Kumar, U., Juuso, E., Lahdelma, S., 2012а. Слияние данных технического обслуживания и контроля: необходимость процесса. В: 18-я Всемирная конференция по неразрушающему контролю, 16–20 апреля 2012 г., Дурбан, Южная Африка.Многие технологические предприятия имеют другие программные системы, которые выполняют приложения, связанные с бизнес-функциями (планирование ресурсов предприятия, ERP) или функциями обслуживания (CMMS). Фактически, многие технологические предприятия, особенно те, которые используют интеллектуальные полевые устройства, имеют приложения для мониторинга и обслуживания устройств предприятия, независимо от того, являются ли они устройствами управления технологическим процессом и контрольно-измерительными приборами или другими типами.
Интеграция информации о техническом обслуживании, управлении и мониторинге необходима для замыкания цикла процесса. Вот почему системы CMMS эволюционировали. Программное обеспечение для управления активами предприятия (EAM) сложнее, чем CMMS (Fu et al., 2002). Такие решения обычно обеспечивают связь с полевыми устройствами и хранят относящиеся к ним данные, позволяя отслеживать рабочее состояние полевых устройств. В некоторых случаях приложение EAM может использоваться для связи с устройством для изменения параметров в этом устройстве, чтобы заставить его запускать приложения на себе, такие как процедуры самокалибровки или процедуры самодиагностики, или для получения информации о его состоянии. или здоровье и т. д.
Информация может храниться и использоваться специалистом по обслуживанию для контроля и обслуживания этих устройств. Другие типы приложений используются для мониторинга других типов устройств, таких как вращающееся оборудование, устройства для выработки и подачи энергии. Эти другие приложения иногда доступны для обслуживающего персонала и используются для контроля и обслуживания устройств на технологическом предприятии. Однако во многих случаях сторонние сервисные организации предоставляют услуги, связанные с мониторингом производительности процессов и оборудования.Они собирают необходимые данные, запускают, как правило, проприетарные приложения для анализа данных и просто предоставляют результаты и рекомендации персоналу технологического предприятия. Хотя это полезно, у персонала завода практически нет возможности просматривать необработанные данные или использовать данные анализа каким-либо иным образом. На рис. 4.3 показана блок-схема информации, полученной, когда УК передается на аутсорсинг, а окончательный отчет регистрируется в системе (Galar et al., 2012a).
Рисунок 4.3. Типовой процесс аутсорсинга мониторинга состояния. CM , мониторинг состояния; CMMS , компьютеризированная система управления техническим обслуживанием.
По материалам Galar, D., Kumar, U., Juuso, E., Lahdelma, S., 2012a. Слияние данных технического обслуживания и контроля: необходимость процесса. В: 18-я Всемирная конференция по неразрушающему контролю, 16–20 апреля 2012 г., Дурбан, Южная Африка.На типичных предприятиях функции, связанные с деятельностью по управлению процессами, техническим обслуживанием и мониторингом устройств и оборудования, а также коммерческими операциями, такими как мониторинг производительности процессов, разделены как в месте, где они выполняются, так и в персонале, который обычно их выполняет.Более того, люди, задействованные в этих различных функциях, обычно используют разные инструменты, например, разные приложения, запускаемые на разных компьютерах. Во многих случаях эти разные инструменты собирают или используют разные типы данных, связанных или собираемых с разных устройств в рамках процесса, и настраиваются по-разному для сбора необходимых данных. Тем не менее, для успеха политики технического обслуживания необходимо сотрудничество между всеми отделами предприятия и между экспертами в соответствующих областях (Yu et al., 2004).
Операторы управления процессами обычно контролируют повседневную работу процесса и несут основную ответственность за обеспечение качества и непрерывности его работы. Обычно они влияют на процесс, устанавливая и изменяя уставки в нем, настраивая его контуры, планируя его операции и т. Д. Персонал технического обслуживания несет основную ответственность за обеспечение эффективной работы фактического оборудования в рамках процесса, а также за ремонт и замену неисправного оборудования.Они используют инструменты, такие как интерфейсы обслуживания, приложение EAM, описанное выше, и многие другие диагностические инструменты, чтобы получить информацию о рабочих состояниях устройств в процессе. Специалисты по техническому обслуживанию также планируют работы по техническому обслуживанию, которые могут потребовать остановки отдельных участков установки. Для многих новых типов технологических устройств и оборудования, например, интеллектуальных полевых устройств, сами устройства могут включать средства обнаружения и диагностики, которые автоматически обнаруживают проблемы с работой устройства и автоматически сообщают о них обслуживающему персоналу через стандартный интерфейс технического обслуживания.
Интерфейсы обслуживания и обслуживающий персонал составляют огромную сеть передачи данных (Davies and Greenough, 2000), обычно расположенную отдельно от операторов управления технологическим процессом, как показано на рис. 4.4. Однако это не всегда так. На некоторых технологических установках операторы управления процессом выполняют обязанности обслуживающего персонала или наоборот, или разные люди, ответственные за эти функции, могут использовать один и тот же интерфейс (Galar et al., 2012a).
Рисунок 4.4. Типовая архитектура информационной системы обслуживания.
По материалам Galar, D., Kumar, U., Juuso, E., Lahdelma, S., 2012a. Слияние данных технического обслуживания и контроля: необходимость процесса. В: 18-я Всемирная конференция по неразрушающему контролю, 16–20 апреля 2012 г., Дурбан, Южная Африка.Многие приложения используются для выполнения различных функций на предприятии, например, операций по управлению процессами, операций по техническому обслуживанию и бизнес-операций. Они не интегрированы и, следовательно, не передают данные или информацию. Во многих случаях это такие задачи, как мониторинг оборудования, проверка работы устройств, определение того, работает ли установка оптимальным образом и т. Д., выполняются внешними консультантами или обслуживающими компаниями, которые измеряют необходимые данные, проводят анализ и предоставляют персоналу предприятия только результаты анализа. В этих случаях данные обычно собираются и хранятся в соответствии с собственными требованиями и редко предоставляются персоналу завода для других целей.
Учитывая обилие средств анализа данных и других инструментов обнаружения и диагностики, доступных в среде управления технологическим процессом, либо на самом предприятии, либо через сторонние сервисные компании или консультантов, для обслуживания доступен большой объем информации о состоянии и производительности устройств. персонал, который также может быть полезен операторам процессов или должностным лицам.Точно так же информация, доступная оператору технологического процесса о текущем рабочем состоянии контуров управления технологическим процессом и других подпрограммах, может быть полезной для обслуживающего персонала. А информация, генерируемая или используемая в ходе выполнения бизнес-функций, может быть полезна для обслуживающей бригады или оператора управления технологическим процессом.
Однако в прошлом, поскольку эти функции были разделены, информация, сгенерированная или собранная в одной функциональной области, не использовалась вообще или использовалась не очень хорошо в других функциональных областях, что приводило к общему неоптимальному использованию активов на производственных предприятиях. (Галар и др., 2012а).
Праймер по системам управления
Абстрактные
Всестороннее обсуждение теории систем управления лучше всего вести не отдельным текстом, а небольшой библиотекой технических публикаций. Эта статья не является исчерпывающей, а скорее дает практический обзор темы. Он не будет обсуждать системный дизайн в каком-либо качестве; тем не менее, он предоставит достаточно информации, чтобы быстро развить беглое понимание фундаментальной терминологии и концепций системы управления.
Введение
Система управления — это средство, используемое для управления процессом. Процесс может существовать в различных формах, в виде механических, электрических, химических или вычислительных систем, как в случае математической модели. Система управления состоит из устройства, известного как контроллер, и метода, используемого для регулирования поведения определенного компонента процесса. Управляемый компонент известен как переменная процесса. В данном техническом обзоре параметром процесса будет поток газа.
Как и различные процессы, которыми он управляет, сам контроллер может существовать в различных формах. Это может быть механическое устройство, электрическая цепь, компьютер или комбинация этих форм. В случае регулирования расхода газа регулятором обычно является какой-либо тип клапана. Управляющая переменная — это компонент контроллера, который определяет степень манипулирования переменной процесса. В этом случае регулирующая переменная представляет открытие клапана. Способ манипулирования управляющей переменной определяется методом управления.
Например, используя пропорциональный клапан, поток газа можно регулировать размером отверстия клапана. При использовании двухпозиционного клапана это невозможно, так как клапан может быть только полностью открыт или закрыт. В этом случае потоком необходимо управлять, изменяя соотношение продолжительности открытия и закрытия клапана. Цель манипулирования переменной процесса контроллером — повлиять на переменную, чтобы она соответствовала определенному состоянию, называемому уставкой. В предыдущем примере уставка — это скорость потока.
Системные классификации
Существует два основных класса систем управления. Первая — это система управления без обратной связи, которую иногда называют пассивной системой управления. Системы управления с разомкнутым контуром могут управлять, но не воспринимать переменную процесса. Эти системы слепо контролируют переменную процесса без привязки к заданному значению.
Второй класс — это системы управления с обратной связью, иногда называемые активными системами управления.Системы управления с обратной связью обладают способностью как контролировать, так и измерять переменную процесса. Это достигается за счет использования обратной связи. Используя обратную связь, система управления с обратной связью может определить, когда переменная процесса отличается от уставки, и будет использовать предписанный метод для изменения переменной управления таким образом, чтобы она влияла на переменную процесса в сторону уставки.
Чтобы лучше понять эти типы систем управления, рассмотрим несколько простых примеров, основанных на отоплении дома.В этом случае текущая температура птичника является переменной процесса, а желаемая температура птичника — заданным значением.
Один из способов обогреть дом — использовать камин. Это хороший пример системы управления без обратной связи. Здесь регулируемой переменной является тепло, выделяемое огнем. Как указывалось ранее, системы управления без обратной связи не могут использовать заданное значение. Следовательно, нет возможности ввести желаемую температуру в доме в камин. Размер огня можно изменить, добавляя или удаляя поленья, но камин не может ссылаться на заданное значение или регулировать свою мощность.
Еще один способ обогрева дома — печь. Это хороший пример системы управления с обратной связью. Здесь регулируемой переменной является тепло, выделяемое печью. Печь способна одновременно определять как переменную процесса (текущую температуру в помещении), так и заданное значение (желаемую температуру в помещении) с помощью термостата и соответствующим образом регулировать свою мощность.
Параметры управления
Система управления — это комбинация устройства и метода, используемого для регулирования поведения переменной процесса.В то время как система без обратной связи имеет только один метод управления, системы с обратной связью могут иметь различные методы управления.
Обратите внимание, что в примере системы управления отоплением дома на основе печи тип печи не указан. Есть много типов печей, в которых используются разные методы управления.
Например, бытовая масляная печь с принудительной подачей воздуха может выводить воздух только с фиксированной температурой и фиксированной скоростью потока. В этом случае, если переменная процесса ниже уставки, система управления попытается исправить ситуацию, изменив переменную управления.У печи есть только два возможных состояния регулирующей переменной: включено или выключено. Этот тип замкнутой системы управления использует метод, называемый двухпозиционным управлением.
Двухпозиционные системы управления обычно не обеспечивают точного управления переменной процесса. В предыдущем примере, когда термостат измеряет температуру в птичнике, равную заданному значению, он уведомляет печь о завершении запроса на тепло. Затем печь начинает цикл охлаждения; он будет продолжать выводить воздушный поток, пока этот цикл не будет завершен.Часто это приводит к тому, что переменная процесса превышает заданное значение. Это называется перерегулированием.
Аналогичным образом, когда дом остывает до заданного значения, термостат включает печь. К тому времени, когда печь нагревается и начинает подавать тепло в дом, фактическая переменная процесса часто опускается ниже заданного значения. Это называется недолет.
Рассмотрим другой пример печи с коммерческой газовой печью. Часто эти печи могут регулировать либо температуру воздуха, который выводится путем изменения количества газа, подаваемого в пламя, либо объем воздуха, который выводится путем изменения механической заслонки.Этот метод управления называется пропорциональным управлением. Система отопления с пропорциональным управлением более эффективна и точна, чем система отопления с двухпозиционным управлением, поскольку она может изменять количество выделяемого тепла.
В общем, системы управления нагревом управляют относительно медленными переменными процесса. Другие системы управления могут управлять очень быстро меняющимися переменными процесса и часто требуют более точного управления. Конкретные примеры — системы контроля давления и расхода. Системы управления для этих типов переменных процесса часто используют еще один метод управления, называемый пропорционально-интегрально-производным (ПИД).
Хотя подробное обсуждение систем ПИД-регулирования выходит за рамки этого документа, здесь представлен общий обзор. Система управления PID использует передовую методологию управления, которая использует ряд независимых параметров управления. Эти параметры позволяют очень быстро и точно влиять на параметр процесса в сторону уставки. Хотя в чисто теоретическом смысле управляющие параметры являются масштабными переменными или коэффициентом усиления, на практике они часто интерпретируются с точки зрения времени.Если ошибка определяется как разница между текущим значением переменной процесса и уставкой, параметры управляют ошибкой следующими способами:
P — Текущая ошибка
I — Накопление прошлых ошибок
D — Прогнозирование будущих ошибок (на основе текущей скорости изменения)
Если создается математическая модель общего процесса, можно использовать моделирование, чтобы показать, как он будет реагировать на различные системы управления. Это наглядно демонстрирует, как меняется эффективность различных систем управления.В первом моделировании используется двухпозиционная система управления (иногда ее называют «взрыва»).
Как упоминалось ранее, двухпозиционная система управления имеет только два возможных состояния, которые соответствуют регулируемой мощности 0% или 100%. Как показано на рисунке 1, двухпозиционная система обеспечивает очень слабый контроль переменной процесса. Он никогда не может стабилизироваться на заданном значении, но вместо этого постоянно производит резкие выбросы и недостижения переменной процесса относительно заданного значения.Такое постоянное переключение системы не очень эффективно и также может вызвать нагрузку на компоненты контроллера.
Рисунок 1: Моделирование двухпозиционной системы управления.
В дальнейшем моделирование будет сосредоточено на применении различных схем управления к одной и той же модели процесса. Существует несколько комбинаций параметров управления, которые можно применить к системе. Все системы P, PI, PD и PID действительны, но могут использоваться в различных обстоятельствах. Эти параметры должны быть надлежащим образом выбраны, поскольку набор параметров ПИД, который хорошо подходит для одного процесса, может быть нестабильным или даже совершенно непригодным для другого процесса.
Модель процесса с произвольно выбранными параметрами управления будет очевидна. На рисунке 2 показано такое моделирование и показана нестабильность, которая может возникнуть из-за этих несоответствующих параметров управления. Здесь управление системой хуже, чем при двухпозиционной системе.
Рисунок 2: Моделирование системы управления с использованием произвольных параметров ПИД-регулирования.
Следующее моделирование применит ту же систему управления к модели процесса, используя параметры управления, которые больше подходят для динамики процесса.Как показано на рисунке 3, теперь система эффективно влияет на параметр процесса в сторону уставки. Хотя эти параметры более подходящие, им все еще не хватает надлежащей настройки. Примерно через 700 секунд система наконец достигает точки стабильности, называемой устойчивым состоянием. Вплоть до этого момента наблюдается значительная флуктуация переменной процесса. Это колебание, или звон, постепенно уменьшается по величине с течением времени. Период времени, который истекает, пока стихает звон и пока не будет достигнуто установившееся состояние, называется временем установления.В этой системе время оседания довольно велико.
Рисунок 3: Моделирование системы управления с использованием неправильно настроенных параметров ПИД-регулятора.
Звонок и относительно длительное время установления, производимые этой системой управления, нежелательны и могут быть устранены путем настройки. Настройка — это процесс оптимизации системы управления путем соответствующей и согласованной настройки каждого из параметров управления в соответствии с характеристиками контролируемого процесса.Настройка очень сильно зависит от динамики процесса.
Чтобы систематически подходить к концепции настройки, а также эффективно проиллюстрировать вклад каждого управляющего параметра в систему, в оставшихся симуляциях будет применяться один управляющий параметр за раз. Первый интересующий параметр — пропорциональный.
На рисунке 4 показано, что применение параметра пропорционального управления эффективно сокращает время установления. Это результат минимального или приглушенного звонка.Побочный эффект, который часто присутствует до некоторой степени в чисто пропорциональной схеме управления, — это явление, когда переменная процесса стабилизируется со смещением от уставки. Это называется ошибкой установившегося состояния.
Рисунок 4: Моделирование системы пропорционального регулирования.
Иногда, учитывая точность управления, стоимость, время разработки и сложность, ошибка установившегося состояния является приемлемым атрибутом, который можно изменить просто с помощью соответствующего смещения уставки.Если это не подходит, способ устранения ошибки установившегося состояния состоит в применении интегрального управляющего члена к системе. На рисунке 5 показана система с соответствующим параметром интегрального управления. В этом случае время установления остается неизменным, но параметр интегрального управления эффективно снижает ошибку установившегося состояния.
Рисунок 5: Моделирование пропорционально-интегральной системы управления.
Некоторые процессы имеют очень критические допуски и, следовательно, требуют многого от систем управления, управляющих их переменными процесса.Часто в этих случаях недопустимо иметь что-либо большее, чем малейшее превышение нормы при приближении к заданному значению. В этом случае обычно рекомендуется применять к системе термин производного контроля.
На рисунке 6 показаны результаты соответствующей системы ПИД-регулирования. Параметр процесса повышается до заданного значения и устанавливается очень быстро с минимальным звоном и незначительной ошибкой установившегося состояния. Все это достигается с помощью управляющей переменной, которая соответствует динамике процесса.Это намного эффективнее и точнее, чем схема двухпозиционного управления, рассмотренная ранее, и может быть достигнута только с помощью точной настройки параметров управления.
Рисунок 6: Моделирование системы пропорционально-интегрально-производной.
Надеюсь, это обсуждение помогло познакомить читателя с основами систем управления. Если требуется более глубокое знание этих тем или проектирования систем управления, доступно множество текстов [1].
Список литературы
- R. Bateson, Introduction to Control System Technology , Englewood Cliffs: Prentice Hall, Upper Saddle River, NJ, 5-е издание, 1996.
Каковы применения систем управления? — MVOrganizing
Каковы области применения систем управления?
Системы управленияиспользуются в домашних условиях, в общей промышленности, в военной сфере и практически во всех современных транспортных средствах в мире. Системы управления очень распространены в системах SCADA и промышленной автоматизации.Системы управления используются в промышленной автоматизации для регулирования работы устройств в реальном времени.
Какие примеры систем управления?
Система, используемая для управления положением, скоростью, ускорением, температурой, давлением, напряжением, током и т. Д., Является примерами систем управления. Давайте возьмем пример простого регулятора температуры в помещении, чтобы прояснить концепцию.
Какие бывают типы систем управления?
Типы систем управления | Линейная и нелинейная система управления
- Линейные системы управления.
- Нелинейные системы управления.
- Аналоговая или непрерывная система.
- Цифровая или дискретная система.
- Системы с одним входом и одним выходом.
- Системы с несколькими входами и несколькими выходами.
- Система с сосредоточенными параметрами.
- Система распределенных параметров.
Что такое система управления PPT?
Системы управления PPT | Презентация PowerPoint | PDF: Система — это комбинация числового оборудования или компонентов, последовательно соединенных для выполнения определенной функции.В системе, когда количество на входе регулируется путем изменения количества на входе, система называется системой управления.
Какие компоненты системы управления?
Система управления с обратной связью состоит из пяти основных компонентов: (1) вход, (2) управляемый процесс, (3) выход, (4) чувствительные элементы и (5) контроллер и исполнительные устройства. Эти пять компонентов показаны на рисунке 1.…
Что такое естественная система контроля?
Естественные системы контроля: Биологические системы, системы внутри человека относятся к естественному типу.Системы, изменяющиеся во времени и неизменяющиеся во времени: Системы управления, изменяющиеся во времени, — это такие системы, в которых параметры систем изменяются со временем. Это не зависит от того, являются ли вход и выход функцией времени или нет.
Какие два основных типа систем управления?
Существует два основных типа систем управления: система с разомкнутым контуром и система с замкнутым контуром. Оба они могут быть представлены блок-схемами. Блок-схема использует блоки для представления процессов, а стрелки используются для соединения различных частей ввода, процесса и вывода.
Каковы три компонента системы управления?
Структура системы управления с обратной связью обсуждается в главе 1; базовая система состоит из трех элементов: детектора ошибок, контроллера и элемента вывода.
Зачем нужна система управления?
Система управления управляет, командует, направляет или регулирует поведение других устройств или систем с помощью контуров управления. Он может варьироваться от простого контроллера отопления дома, использующего термостат, управляющего бытовым котлом, до крупных промышленных систем управления, которые используются для управления процессами или машинами.
Какая самая важная функция системы управления?
«Одной из основных функций большинства систем управления является обеспечение защиты как компонентов цепи, так и двигателя. Предохранители и автоматические выключатели обычно используются для защиты цепей, а реле перегрузки используются для защиты двигателя ».
Каковы цели системы управления?
Цели контроля: Обеспечить выполнение действий в соответствии с заранее установленным стандартом, то есть убедиться, что деятельность приводит к желаемому результату.2. Знать, что происходит или что на самом деле произошло в организации.
Что такое понятие контроля?
Концепция контроллинга. Слово «контроль» предполагает проверку, тестирование, регулирование, проверку или регулировку. Контроль обеспечивает основу для будущих действий. Это также помогает предпринять корректирующие действия для соответствия стандартам. Контроль — это потребность контролировать поведение других людей.
Каков первый шаг процесса контроля?
Функцию управления можно рассматривать как пятиэтапный процесс: (1) установить стандарты, (2) измерить производительность, (3) сравнить фактическую производительность со стандартами и выявить любые отклонения, (4) определить причину отклонений и ( 5) При необходимости выполните корректирующие действия.
Что такое контроль и контроль шести причин?
(1) Адаптироваться к изменениям и неопределенности. (2) Выявление нарушений и ошибок. (3) Снижение затрат, повышение производительности или добавление стоимости. (4) Обнаруживать возможности. (5) Справляться со сложностями.
Что нам нужно контролировать в организации?
ВВЕДЕНИЕ. Организациям необходимы средства контроля, чтобы определить, достигаются ли их цели, и при необходимости предпринять корректирующие действия. Природа контроля в организациях.Контроль — это регулирование деятельности организации таким образом, чтобы некий целевой элемент эффективности оставался в допустимых пределах.
Каковы преимущества контроля?
Преимущества. Организационный контроль имеет множество разнообразных преимуществ, включая улучшенную коммуникацию, финансовую стабильность, повышение производительности и эффективности, помощь в достижении годовых целей, повышение морального духа, соблюдение правовых норм, улучшенный контроль качества, а также предотвращение мошенничества и ошибок.
Какие четыре этапа контроля?
4 ступени процесса управления;
- Установление стандартов и методов измерения производительности.
- Измерение производительности.
- Определение соответствия производительности стандарту.
- Принятие корректирующих мер.
Каковы 6 областей организационного контроля?
Различайте шесть областей организационного контроля: физический, человеческий, информационный, финансовый, структурный и культурный. Контроль: Контроль — это процесс. Он определяет заранее определенную цель организаций.
Что из этого является характеристикой эффективной системы управления?
Чтобы система управления была эффективной, она должна быть: Точной.Информация о производительности должна быть точной. Оценка точности получаемой информации — одна из важнейших контрольных задач, с которыми сталкиваются менеджеры.
Каковы основные системы, которыми управляет организация?
Система лидерства — это ДНК организации, ее генетический код или отличительный бренд … Шесть систем организационной эффективности
- Лидерство.
- Связь.
- Подотчетность.
- Доставка.
- Производительность.
- Измерение.
Что из следующего представляет пять функций планирования?
Пять основных функций: планирование, организация, укомплектование персоналом, руководство и контроль. Планирование включает установление целей и стандартов, разработку правил и процедур, а также разработку планов и прогнозов.
Каковы цели планирования?
Здесь мы подробно рассказываем о шести основных целях планирования в Индии, а именно: (а) экономический рост, (б) достижение экономического равенства и социальной справедливости, (в) достижение полной занятости, (г) достижение экономической самостоятельности, (д) ) Модернизация различных секторов и (е) Устранение дисбалансов в экономике.
Сети с малой задержкой для приложений систем управления
В приложениях систем управления эффективная передача данных от датчиков к системе обработки и от системы обработки к исполнительным механизмам и двигателям часто важна для оптимальной функциональности и производительности системы. Сети с малой задержкой обеспечивают эффективную передачу данных между компонентами системы, что делает их основой многих систем управления.
На самом базовом уровне система управления состоит из завода, т.е.е. процесс или устройство, которым мы хотим управлять, и Контроллер, который предоставляет входные данные для завода, которые определяют его поведение. В большинстве систем управления выходы от завода возвращаются контроллеру, который постоянно обновляет входные данные для завода, чтобы получить желаемые выходы / поведение. Это называется системой управления с обратной связью. Например, рассмотрим шаговый двигатель. Пользователь указывает положение двигателя контроллеру, который управляет входами шагового двигателя. Энкодер на шаговом двигателе обеспечивает обратную связь с контроллером, чтобы он мог подтвердить положение двигателя и соответствующим образом отрегулировать способ, которым он управляет шаговым двигателем.
При установлении требований к сетям с малой задержкой необходимо определить ряд параметров теории управления. Эти параметры сильно зависят от основных элементов системы управления. В этой статье мы обсудим следующие параметры:
- Частотная характеристика
- Время обновления системы
- Задержка
- Требования к полосе пропускания
- Типы и топология сети
- Обработка ошибок
Частотная характеристика
Первый параметр, который необходимо определить в системе управления находится АЧХ завода.Насколько быстро будут меняться выходы завода в ответ на изменения входов? Частотная характеристика сильно зависит от свойств растения и от лежащих в основе контролируемых физических процессов. Например, температура электронного устройства может изменяться относительно медленно при изменении нагрузки обработки устройства и выполняемых приложений. Это позволяет выполнять такие задачи управления температурным режимом, как измерение температуры, регулировка скорости вращения вентилятора и другие методы охлаждения, даже при запуске на относительно низкой скорости.Таким образом, инженер-конструктор может сосредоточиться на минимизации затрат на компоненты при разработке решения для управления температурным режимом для этого типа устройства. В качестве альтернативы научное измерительное устройство может включать в себя высокочувствительный оптический приемник, который очень быстро реагирует на изменения входящего лазерного света. В этом сценарии разработчик должен использовать высокоскоростные схемы, которые будут быстро обнаруживать, анализировать и реагировать на эти быстро меняющиеся входные данные.
Время обновления системы
Параметр управления, тесно связанный с частотной характеристикой установки, — это время обновления системы.В большинстве аналоговых систем Контроллер непрерывно настраивает аналоговые входы для установки в ответ на аналоговые выходы. Однако в большинстве цифровых систем выходные данные завода сначала собираются и анализируются Контроллером, затем следующий набор входных данных завода рассчитывается и отправляется на завод. Продолжительность между каждой итерацией этого циклического процесса называется временем обновления системы или системным периодом. Чтобы эффективно управлять выходами объекта, период системы (или частота) должен быть быстрее, чем частотная характеристика объекта.В сценарии управления температурным режимом допустимо, чтобы время обновления системы управления температурным режимом было медленным в ответ на медленно меняющуюся температуру устройства. С другой стороны, время обновления системы лазерной оптики должно быть значительно быстрее из-за быстрого времени отклика оптического датчика.
Электростатические тормозные устройства для промышленной транспортной системы
.
Nuvation Engineering разработала системный контроллер для устройств электростатического торможения в промышленной транспортной системе, которая транспортирует пакеты на предприятии по выполнению заказов.Устройствам требовалось время обновления системы более 50 Гц, чтобы система транспортировки работала на высокой скорости, не вызывая падения пакетов с конвейера в точках повышенного риска, таких как уклоны и крутые повороты. Альтернативой — которая является нормой для таких систем транспортировки — была бы работа всей системы транспортировки на более медленной скорости, чтобы обеспечить безопасное обращение с упаковками во всех точках линии. Nuvation Engineering поставила контроллер электростатического торможения, который превысил требуемое время обновления 50 Гц, что позволило нашему клиенту реализовать свое инновационное решение для транспортировки пакетов.
Задержка
Третий параметр, который следует учитывать, — это задержка. Этот параметр может быть определен как задержка между наблюдением выходного сигнала завода и обновлением контроллером входных данных завода. В системе управления может быть несколько задержек, которые способствуют общей задержке системы, включая задержки датчиков, задержки передачи данных по сети и задержки обработки. Обычно системы управления работают так, чтобы минимизировать задержку. Ответ на вопрос «насколько велика задержка?» сильно зависит от системного контекста.
Требования к полосе пропускания
Требования к полосе пропускания для сетей можно рассчитать, указав количество и тип приводов / двигателей и датчиков в системе, форматы данных и частоту дискретизации / обновления. При расчете пропускной способности сети также необходимо включать сообщения об управлении и мониторинге работоспособности на уровне системы. Необходимо учитывать требования как к средней, так и к пиковой полосе пропускания, чтобы сети имели достаточную пропускную способность и не вносили дополнительную задержку в систему управления.
Типы сетей и топология
Сети можно в целом разделить на три основные категории с точки зрения их задержек:
- Стандартные вычислительные сети
- Сети промышленной автоматизации
- Пользовательские сети
На верхнем конце спектра находятся стандартные вычислительные сети, такие как Ethernet и USB. Эти типы сетей поддерживаются большинством микропроцессоров с помощью зрелого и надежного программного обеспечения стека связи. Они хорошо подходят для приложений с длительными системными периодами и систем, устойчивых к переменной задержке.
Сетевые протоколы промышленной автоматизации включают EtherCAT, Profibus и CAN. Аппаратные и программные элементы этих сетей учитывают потребность в эффективности использования полосы пропускания, меньших задержках и надежности связи. Эти сети часто используются в приложениях автоматизации управления.
Для систем с очень низкими требованиями к задержке и высокой частотой дискретизации / обновления может потребоваться настраиваемая сеть. Эти сети часто используют существующий физический уровень и индивидуальные протоколы, оптимизированные для типов данных, передаваемых по сети.Эти сети часто реализуются в программируемой логике (CPLD или FPGA), чтобы минимизировать задержку за счет разгрузки обработки сетевых протоколов с центрального процессора.
Сеть EtherCAT с малой задержкой для системы транспортировки полупроводников
.
Nuvation Engineering реализовала сеть EtherCAT с малой задержкой для промышленной системы управления, которая транспортирует пластины с микросхемами по транспортной системе предприятия по производству полупроводников. Сеть должна была поддерживать до 10 000 узлов по всему крупному объекту.Система использовала распределенное и синхронное управление двигателем в реальном времени, машинное зрение и отслеживание / управление запасами. Сетевой протокол EtherCat был выбран из-за надежной работы EtherCat в сетевых приложениях с малой задержкой. Чтобы удовлетворить высокий уровень накладных расходов на обработку данных от многочисленных узлов и разнообразия систем управления, инженеры Nuvation внедрили специальные алгоритмы управления в процессоры FPGA и DSP по всей системе управления.
Помимо типов сети очень важна топология сети.Сети с последовательным подключением сокращают требования к сетевой проводке, а также сокращают количество сетевых интерфейсов в контроллере. Однако сети с последовательным подключением также могут вызывать задержку и увеличивать требования к пропускной способности каналов, ближайших к контроллеру. В качестве альтернативы топология сети типа «звезда» минимизирует задержку и полосу пропускания на каждом канале, но может потребоваться сетевой концентратор на контроллере и значительное количество сетевых интерфейсов. Гибридные сети — это потенциальное решение, которое объединяет эти две топологии для удовлетворения требований как к полосе пропускания канала, так и к задержке.
Nuvation Engineering разработала гибридную топологию сети и протокол для приложения автоматизации производства. Система собирала данные датчика положения для контроллера, который предоставлял текущие настройки линейным двигателям, которые перемещали поддоны в процессе производства. Традиционная сетевая топология с последовательным подключением не могла поддерживать требования к пропускной способности данных и быстрому системному периоду, поэтому Nuvation разработала гибридную топологию. Эта настраиваемая топология состояла из нескольких параллельных сетей с последовательным подключением, в которых использовался разработанный Nuvation настраиваемый сетевой протокол на основе FPGA для удовлетворения требований к полосе пропускания и системному периоду.
Обработка ошибок
Другие области рассмотрения включают надежность сети, мониторинг работоспособности и обработку ошибок. В случае системных предупреждений, ошибок, сбоев или пропущенных сетевых сообщений необходимо определить методы идентификации этих событий и реагирования на них. Например, если выходные данные установки изменяются медленно, может быть достаточно использовать ранее полученные данные и дождаться следующего системного периода для получения новых данных. Для быстро изменяющихся выходных сигналов Plant обработка ошибок и сбоев может потребоваться в программируемых логических устройствах или в аппаратных средствах, чтобы быстро реагировать, чтобы гарантировать безопасность и защитить оборудование от повреждений.
Резюме
Сети с малой задержкой являются основой систем управления, поскольку они обеспечивают эффективную передачу данных между элементами системы. Команда разработчиков продукта должна учитывать широкий спектр соображений теории управления, чтобы гарантировать, что все точки проекта, в которых могут возникнуть проблемы с задержкой, были идентифицированы и решены. Эти решения, как правило, включают комбинацию вариантов дизайна, от выбора аппаратных компонентов до выбора сетевого протокола для реализации.Для сложных систем высокой надежности с требованиями к быстрому времени отклика может потребоваться разработка настраиваемых алгоритмов управления и сетевых протоколов, отвечающих уникальным свойствам целевого приложения управления.
Nuvation Engineering имеет более чем 20-летний опыт проектирования систем управления для самых разных приложений. Свяжитесь с нами, чтобы получить помощь по проекту системы управления.
В частности, система управления состоит из:
Внутренний контроль
- Специалист внутреннего контроля
Внутренний контроль осуществляется каждым управляющим органом или автономным государственным учреждением на основании письменных процедур.Этот внутренний контроль состоит из специализированной внутренней проверки, проверки обязательств и расчетов, бухгалтерской проверки и проверки правильного финансового управления.
Что касается специализированного внутреннего контроля, то можно назвать многие категории инспекционной деятельности, такие как превентивный контроль, следственный контроль, ручной контроль, компьютеризированный контроль и управленческий контроль. Примерами являются таблицы управления, прямой надзор за деятельностью или функцией, обработка информации, физические проверки, показатели эффективности, разделение функций, утверждение, обзор, сравнение данных, коды проверки и т. Д.Специализированный внутренний контроль имеет место во время распределения и контроля субсидий, а также во время контроля за соблюдением закона, регулирующего государственные ресурсы.
Контроль за распределением и использованием субсидий распространяется на субсидии, выделяемые региональным субъектом или юридическим лицом, которое прямо или косвенно субсидируется региональным субъектом. Контроль за соблюдением закона, регулирующего государственные ресурсы, распространяется на ресурсы, выделяемые региональным субъектом.
- Контроль исполнения обязательств и расчетов
Контроль исполнения обязательств и расчетов осуществляется Контролерами по обязательствам и расчетам. Они выдают визу для выполненных обязательств и расчетов, которые относятся к бюджету, чтобы гарантировать, что кредиты для обязательств и расчетов не превышены. Кроме того, они выдают визу в качестве уведомления об утверждении контрактов и государственных контрактов, а также о решениях о предоставлении субсидий до их уведомления.
Бухгалтерская проверка — это комплекс бухгалтерских процедур, направленных на поддержание точности и надежности записей в счетах и других бухгалтерских документах, а также на защиту имущества.
- Проверка рационального финансового управления
Проверка рационального финансового управления состоит из набора процедур, гарантирующих, что цели достигаются экономичным, эффективным и действенным образом и что бюджетные кредиты расходуются только на определенные цели и в утвержденных пределах.Как минимум, инспекция заключается в контроле региональных субсидий в отношении рационального финансового управления.
Управленческий контроль
Управленческий контроль состоит из набора процедур для контроля количественной оценки и измерения целей и документов политики. Он основан на показателях эффективности и аналитическом учете.
Административно-бюджетный контроль;
Административно-бюджетный контроль осуществляется финансовыми инспекторами.
Внутренний аудит
Внутренний аудит состоит из деятельности, которая является как независимой, так и объективной, и действует как гарантия и дает совет, посредством чего миссия заключается в улучшении работы организации, тем самым обеспечивая дополнительную ценность. Роль внутреннего аудита заключается в основном в изучении и оценке работы, результативности и действенности внутреннего контроля.
.