асинхронный, синхронный или на постоянных магнитах?
Можно ли буксировать электромобили? Зависит от типа двигателя. Да, бывают разные. Если вы только собираетесь покупать электрокар, то знайте: до полной разрядки его лучше не доводить. И вот почему
Автомобили с двигателями внутреннего сгорания допускают буксировку. Если у вас механическая коробка передач, то это самое простое дело: ставите нейтраль в коробке передач или выжимаете сцепление – и ваш мотор оказывается физически отключен от колес, а машина превращается в обычную телегу: тяни не хочу.
С автоматами чуть сложнее, в них полного разрыва связи между колесами и мотором не предусмотрено. Но и они в режиме N позволяют буксировать машину на короткие расстояния и с невысокой скоростью.
Однако в инструкциях к электромобилям вы прочтете, что буксировка или не допускается вовсе, или, как в случае с современными моделями Tesla, допускается со скоростью не более 5 км/ч на расстояние не более 10 метров: иными словами, вы в праве только оттолкать сломанную машину на обочину.
А может ли быть иначе? Да, старые модели Tesla такое позволяли. Как и GM EV1 – легенда электрокаров 90-х годов прошлого века. Так в чем же дело? В типе электрических двигателей. Или, если уж говорить совсем правильно, электрических машин, так как в электромобилях эти устройства служат не только двигателями, но и генераторами. И на современных типах электрокаров встречается три типа таких устройств. Но для начала немного истории.
В 1821 году британский ученый Майкл Фарадей в своей статье впервые описал основные принципы преобразования электроэнергии в движение. Фарадей уже знал, что электрический ток, проходя через проволоку, создает магнитное поле. Закрученный в катушку, такой провод становится электромагнитом.
Он также знал, что противоположные полюса магнитов притягиваются, а одинаковые – отталкиваются. В электромагнитах же полярность зависит от направления движения тока, то есть ее можно быстро менять. И вот что придумал Фарадей. Берем магнит, который движется к другому.
Чтобы понять, как это действует, представьте, что у вас в руках два школьных магнита в форме подковы или буквы U – помните, были такие. Если их повернуть друг к другу взаимоотталкивающимися полюсами, то они будут стремиться сделать полуоборот, чтобы снова друг к другу притянуться. А теперь представьте, что их полюса постоянно меняются местами: тогда они станут вертеться друг относительно друга. Это и есть электродвигатель.
Так впервые был описан принцип действия всех электромоторов в целом и самого древнего в частности: того, который работает от постоянного тока и использует с одной стороны постоянные магниты из намагниченного сплава, а с другой – переменные электромагниты. Это наш первый герой: мотор-генератор постоянного тока на перманентных магнитах.
Это наш первый герой: мотор-генератор постоянного тока на перманентных магнитах.
Изобретения Фарадея были развиты его полседователями, в частности изобретателем электрической лампочки Томасом Эдисоном. Эдисон усовершенствовал генераторы постоянного тока и стал пионером в электрификации Нью-Йорка. В 1884 году на пороге его кабинета появился молодой сербский инженер. Звали иммигранта Никола Тесла.
Тесла предложил улучшить конструкцию Эдисона и попросил за работу 50 тысяч долларов – баснословная в те времена сумма. По легенде Эдисон согласился, но когда Тесла действительно существенно улучшил существующую модель, любимец Америки просто кинул безвестного сербского эмигранта.
Тесла рассердился и отправился к главному конкуренту, адепту переменного тока Джорджу Вестингаузу. Так началась «Война токов», окончательно проигранная постоянным током только в 2007 году, когда Нью-Йорк последним из городов перешел на ток переменный.
Генераторы Эдисона вырабатывали электричество с напряжением, близким к потребительскому: 100-200 вольт. Это удобно для домов, но его сложно передавать на большие расстояния из-за сопротивления проводов. Тут было два решения: увеличивать диаметр кабелей или повышать напряжение. Первый вариант позволял делать линии длинной 1,5 километра. Да, совсем немного. Второй вариант был невозможен из-за отсутствия в те годы эффективных способов повышения напряжения постоянного тока.
Это удобно для домов, но его сложно передавать на большие расстояния из-за сопротивления проводов. Тут было два решения: увеличивать диаметр кабелей или повышать напряжение. Первый вариант позволял делать линии длинной 1,5 километра. Да, совсем немного. Второй вариант был невозможен из-за отсутствия в те годы эффективных способов повышения напряжения постоянного тока.
Однако еще в 1876 году русский ученый Павел Яблочков изобрел трансформатор, меняющий напряжение переменного тока. Подача энергии на большие расстояния перестала быть проблемой.
Но была другая проблема. Лампочкам Эдисона все равно от какого тока питаться: постоянного или переменного. А вот с электродвигателями сложнее: они в те годы требовали только постоянного. В 1888 году Тесла запатентовал в США асинхронный электрический двигатель переменного тока. Он же изобрел и синхронный генератор, впоследствии использованный и как двигатель. Это второй и третий герои нашей статьи.
Так поговорим же о них поподробнее
Если в детстве вам доводилось разбирать игрушечные электрические машинки, то вы должны помнить устройство их простейших двигателей.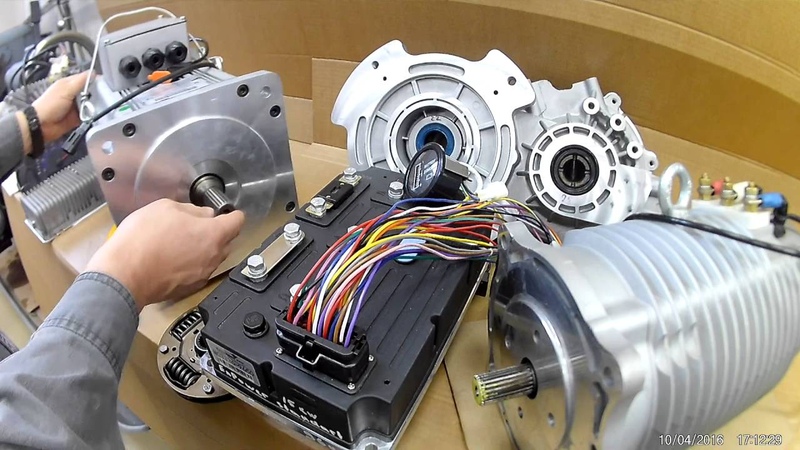 Для остальных напомним. Все применяемые в электромобилях моторы состоят из двух частей: неподвижного статора и вращающегося ротора.
Для остальных напомним. Все применяемые в электромобилях моторы состоят из двух частей: неподвижного статора и вращающегося ротора.
В игрушечных машинах на статоре стоят постоянные магниты, а на роторе – электрические переменные. При вращении на них через специальные щетки подается постоянный ток от батареек, и их последовательное включение и обеспечивает движение.
Похожая конструкция встречается практически у всех электромобилей. С одним отличием: на роторе там стоят постоянные магниты, а на статоре, напротив, электрические и переменные. Так в том числе можно избавиться от щеток: одного из немногих элементов электродвигателя, который подвержен износу.
Преимущество моторов на постоянных машинах в том, что они легкие, компактные, мощные, эффективные, работают от вырабатываемого аккумуляторами постоянного тока… так, стоп! А какие недостатки?
Недостаток прост. Таким моторам не хватает тяги. Так перейдем же к асинхронным инверсионным моторам переменного тока.
Бородатый анекдот про умирающего мастера заваривать чай, который делился своим секретом словами «не жалейте заварки» – это прям притча про компанию Tesla.
Эти двое придумали немыслимое. Создать не тихоходный, эффективный и относительно дешевый электрокар, а дорогой, быстрый и клевый. Маск же первым идею оценил и быстро прибрал ее к рукам.
Имя компании Tesla не случайно. Одной из ее технических революций стало использование асинхронного двигателя без постоянных магнитов, работающего на переменном токе – того самого, который изобрел Никола Тесла. Эта конструкция дороже как сама по себе, так и благодаря необходимости в установке преобразователя постоянного тока от батареи в переменный для электродвигателя. Успешное решение данной задачи и стало первым из множества теперь уже легендарных прорывов «Теслы».
Благодаря мощному асинхронному мотору электрокары Tesla с самого начала были очень динамичным, что стало ключевой причиной роста их популярности. В таком моторе переменный ток в обмотке статора создает вращающееся магнитное поле.
Итак, есть еще третий тип электрического двигателя, который встречается в современных электромобилях: синхронный на электромагнитах. Он похож по устройству на двигатели с постоянными магнитами на роторе, только эти магниты – электрические. На них подается постоянный ток, так что полярность магнитов ротора остается неизменной. А вот полярность магнитов статора, напротив, меняется, что и обеспечивает вращение.
Такие синхронные моторы на электромагнитах славятся своей способностью обеспечивать стабильность оборотов и ставятся, обычно, на всякие установки вроде насосов. А еще… на электрокар Renault Zoe. Зачем? Честно сказать, найти быстрый ответ на этот вопрос не получилось.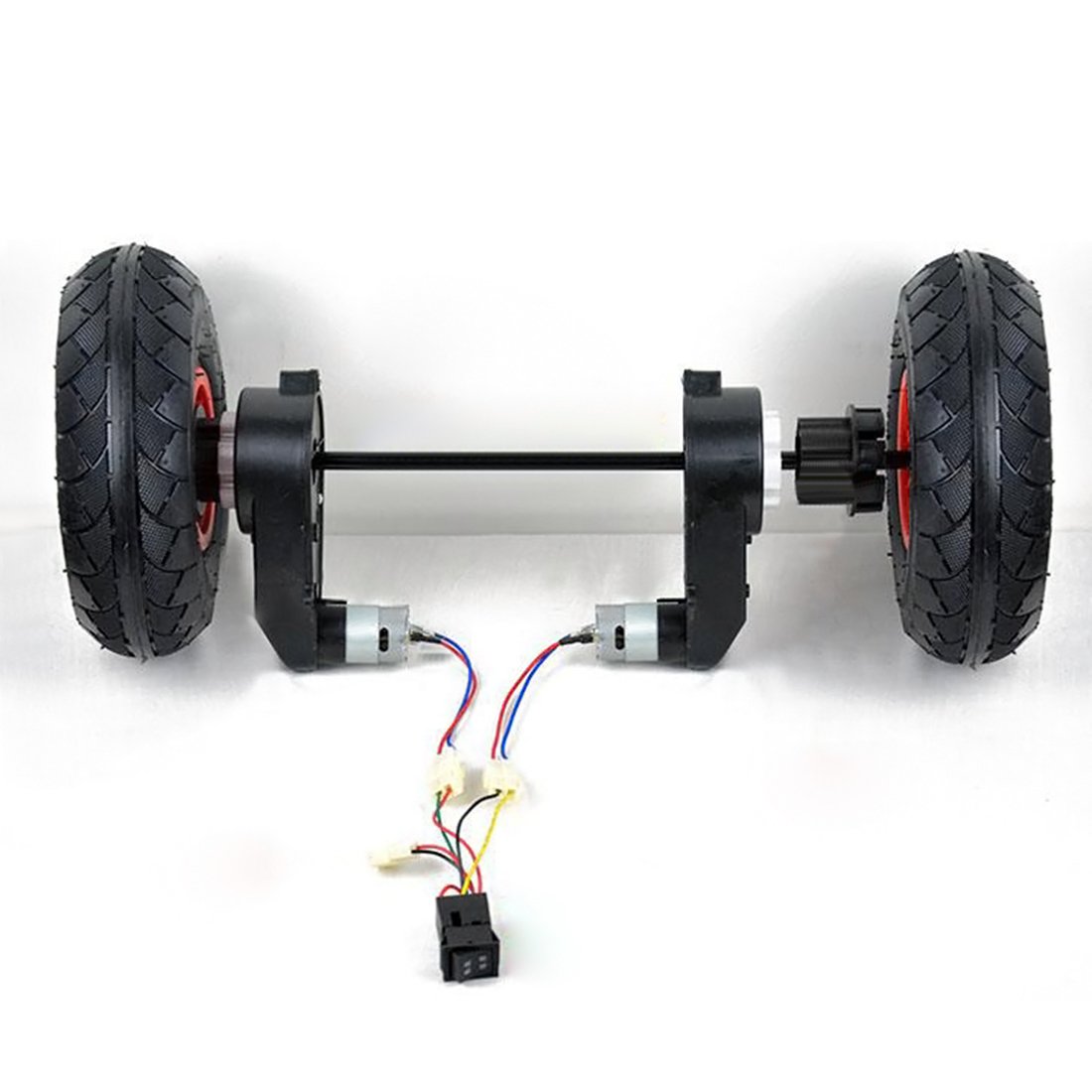 Можем лишь предположить, что это связано с лучшей способностью такого двигателя служить генератором, рекуперируя энергию торможения. Мотор на Zoe не самый мощный, а мощным генератором он быть обязан.
Можем лишь предположить, что это связано с лучшей способностью такого двигателя служить генератором, рекуперируя энергию торможения. Мотор на Zoe не самый мощный, а мощным генератором он быть обязан.
Так что же лучше? Большинство автоконцернов выбирает моторы на постоянных магнитах: они эффективнее. Tesla в первые годы настаивала на асинхронных моторах. Но потом… сделала ставку на двух моторную полнопривродную схему, в которой асинхронный мотор обеспечивает динамику, а двигатель на постоянных магнитах гарантирует низкий расход энергии при небольших нагрузках. И только Renault… ну вы поняли.
А теперь о том, что ждет нас дальше. При буксировке даже обесточенный двигатель на постоянных магнитах тут же начинает работать как генератор, что чревато перегревом и возгоранием энергосистемы электромобиля. В синхронных моторах Renault оставшейся магнетизм в роторе также способен вызвать индукцию в катушках статора, ну и пошло поехало – генерация тока, перегрев, пожар.
И только асинхронные двигатели, когда их статоры не под напряжением, не являются генераторами: их можно буксировать.
Так вот, современная тенденция такова. Моторы на постоянных магнитах становятся все мощнее и тяговитее, оставаясь самыми эффективными. Производители постепенно переходят на них. Но придумать, как машины с ними безопасно буксировать инженерам еще предстоит. Пока они декларируют принцип «Наши электромобили не ломаются и в буксировке не нуждаются». Но звучит не больно убедительно.
Как выбрать электромотор для самодельного электромобиля ? (Или Любого Транспортного Средства)
Какой электродвигатель подойдет лучше всего для электромобиля?
Многие автомобилисты хорошо понимают преимущества переделки традиционных авто в электромобили: отсутствие выбросов, тихая работа, меньшие эксплуатационные расходы, простота обращения и возможность зарядки от любой электрической розетки.
Кроме того, есть преимущество, которое я считаю, также важным – возможность использовать для зарядки батарей автомобиля солнечные панели или ветроэлектростанции. За автономными источниками энергии, как прогнозируют, большое будущее.
Многие самодельщики задаются вопросом, какой тип электродвигателя можно использовать в электромобиле, в чем их отличия.
Итак, рассмотрим основные варианты: по типу напряжения питания различают:
- Электродвигатели постоянного тока.
- Двигатели переменного тока.
- Универсальные электрические машины.
Классы электродвигателей:
- Постоянного тока
- Бесщеточные ЕС (электронно-коммутируемые)
- Со щетками
- С последовательным возбуждением
- С параллельным возбуждением
- Со смешанным возбуждением
- С постоянными магнитами
- Переменного тока
- Универсальные
- Синхронные
- Индукционные
- Однофазные
- Трехфазные
Таблица классификации электродвигателей:
Как вы видите, каждый из этих вариантов имеет подвиды, модификации. Например, в щеточных двигателях постоянного тока якоря могут быть с обмоткой или с постоянными магнитами. Это также верно и для бесщеточных двигателей, хотя при поиске более дешевых вариантов двигатели постоянного тока являются самыми низкими по цене.
В настоящее время электромоторы с щетками рекомендуются только в проектах для личного пользования, когда бюджет ограничен, а эффективность не является самым важным фактором. В коммерческих проектах или когда требуются такие функции, как высокая эффективность, отсутствие необходимости в обслуживании и эксплуатационная надежность, двигатели переменного тока намного предпочтительнее. В настоящее время хороший двигатель переменного тока и его регулятор скорости (инвертор) с функцией рекуперативного торможения стоят всего на несколько долларов дороже, чем старые системы постоянного тока.
Подбор по техническим характеристикам
Необходимая мощность зависит от области применения. Обычно с 30 л.с. (пиковая), эквивалентными 22 кВт, вы можете управлять любым транспортным средством, кроме транспортных средств весом более 1,5 тонн. При разработке автомобилей с высокими характеристиками достаточно мощности от 25 кВт до 100 кВт для скоростей от 120 до 190 км / ч.
Большинство электродвигателей могут обеспечивать большую мощность, чем номинальная, в течение короткого времени. Поэтому при номинальной мощности 10 л.с. двигатель может выдавать 30 л.с. за 2 или 3 минуты без перегрева.
Для любого проекта переоборудования транспортного средства под электротягу, будь вы частным лицом или реализуете проект с коммерческими целями для автопарков, рекомендую начинать с обучения по этой теме. В интернете есть пошаговые руководства и видеоинструкции, но этого может оказаться недостаточно. Поэтому желательно привлечь квалифицированных специалистов с опытом работы в данном направлении.
Необходимо принять во внимание, что для одного и того же транспортного средства и в зависимости от характеристик использования существует более одного двигателя, который можно использовать при преобразовании в электрический:
– Асинхронные двигатели.
– Двигатели с осевым потоком.
– Двигатели с постоянными магнитами.
– Традиционные двигатели постоянного тока.
Электродвигатели могут охлаждаться как воздухом так и жидкостями. А также каждый двигатель комплектуется определенной моделью регулятора скорости (инвертор) + его ускоритель + зарядное устройство и выбранная модель батареи глубокого цикла.
Основные выводы
Наиболее продвинутые системы для электромобилей, с лучшими характеристиками – это те, которые имеют возможность рекуперативного торможения и позволяют использовать энергию, которая обычно теряется в виде тепла.
По наработанному уже опыту, вы спросите меня напрямую, какой двигатель лучше всего подходит для электромобиля, я без колебаний отвечу, что это система с трехфазным асинхронным двигателем и электронным контроллером с рекуперативным торможением. На рынке уже есть варианты трехфазных комплектов аккумуляторных батарей от 48 В до 500 В.
К примеру, на Алибаба.сом достаточно широкий выбор электродвигателей для электротранспорта по достаточно демократичной цене.
Здесь же можно подобрать контроллеры для управления и другие комплектующие.
Контроллер управления электромоторомВ продаже имеются также уже готовые комплекты для сборки своего электротранспорта, в которые могут входить сам электромотор, контроллер, встроенный редуктор, задний или передний мост и др. Ниже приводится фото одного из вариантов от компании Uumotor:
Комплект для электротранспортаМы живем в интересное время коренного слома эпохи ДВС, поэтому у каждого имеется возможность получить новые знания проектирования и реконструкции своих автомобилей, мотоциклов, веллосипедов, мотоблоков на электротягу.
Главное начать !
Двигатель электрический для электромобиля, прошлое, настоящее и будущее
Где применяется электрический автомобильный двигатель
Содержание статьи
Электродвигатель для автомобиля, в качестве тягового устройства применялся на автомобилях (вернее на их прототипах), еще раньше, чем двигатель внутреннего сгорания. Однако на сегодняшний день автомобильные электрические машины (именно так они правильно называются), применяются на электромобилях, работающих исключительно на аккумуляторах или других накопителях электрической энергии, а также на гибридных автомобилях.
Гибридные автомобили называются так, потому, что в них есть и двигатель внутреннего сгорания (ДВС), и аккумуляторная батарея.
История создания
Первая, можно сказать лабораторная, модель-прототип электромобиля была создана почти 200 лет назад. Известно, что в 1828 году венгерский изобретатель Джедлик продемонстрировал тележку, которая двигалась за счет электрической энергии. Но этот образец только показал принцип электрической тяги. Ведь настоящий электродвигатель постоянного тока, способный работать достаточно долго, был изобретен в 1833 году физиком из Великобритании Уильямом Стёрдженом. В 1835 году в Голландии Кристофер Беккер и Стратин Гронинген построили первый электромобиль. Конечно, он был несовершенен и в серийное производство не пошел.
Первый патент на электрический двигатель был получен в 1837 году Томасом Дэвенпортом, именно с этого времени можно сказать, что началось строительство электромобилей. Проблема электромобилей того времени была в очень небольшом заряде тогдашних аккумуляторов. Эту проблему пытались решить американец Томас Давенпорт и голландец Роберт Андерсон, которые создали автомобиль, двигающийся за счет электричества от одноразовых гальванических элементов в 1842 году.
Больших успехов в использовании электрической энергии для тяги достигли в 19-том веке железнодорожники. Уже в 1847 году в Питсбурге (США) работал локомотив (можно назвать его первым электровозом), который получал электричество по рельсам. Аккумуляторы были очень ненадежные и с очень небольшим ресурсом, да и энергии они запасали мало. И только улучшение рабочих характеристик аккумуляторных батарей решило проблему использования электромобилей. Нужно отметить, что первый рекорд скорости превышающей 100 км/час был зафиксирован именно электромобилем.
Так в 1899 году бельгиец Камиль Женатци на электромобиле «La Jamais Contente» разогнался до 105,882 км/ч. Как видно на рисунке (слева) этот электромобиль на резиновом ходу (на пневматических шинах), это тоже было новшеством на тот момент.
Немногим раньше в Лондоне было запущено движение электрических омнибусов (тогдашних автобусов) благодаря Ральфу Уорду. В это же время в Нью-Йорке начали работать такси на электротяге, стали выпускаться электровелосипеды и многие другие подвижные единицы на электричестве. В России они (электромобили, точнее омнибусы) появились в 1901 году (фото справа) разработки инженера Романова. Уже в 1902 году заводом «Дукс» в Москве выпускался электромобиль для частного использования (фото слева).
Напомним, что только в 1878 году Николаусом Отто был запущен в серию четырехтактный двигатель внутреннего сгорания, который можно было устанавливать на автомобиль. Он с некоторыми доработками служит «верой и правдой» автомобилистам и по сей день.
Да, двигатель Отто и резкое падение цен на нефть, из которой получают бензин, вытеснило электромобили почти на 100 лет с рынка, но они вновь завоевывают себе «место под солнцем», тесня классические ДВС. Все это благодаря тому, что электромобили практически бесшумны, экологически безвредны и экономически выгодны в эксплуатации. Нужно напомнить, что КПД электродвигателя высокий и составляет (85…95 %), да и электричество дешевеет. Если его (электричество) получать при помощи солнечных батарей или ветрогенераторов, то эксплуатация электромобиля получается почти бесплатной.
На сегодняшний день доля электромобилей среди всего автопарка составляет около 1%, но это пока. За последние 2 года количество продаж электрокаров увеличилось на 45%. Осталось только подождать, когда бензиновые и дизельные автомобили потихоньку сойдут с рынка.
Принцип работы электромобиля
Классическая схема электромобиля представлена на рисунке справа. Аккумуляторы расположенные здесь вдоль кузова отдают свою энергию через устройство управления (УУ) электродвигателю (ЭД), а он вращает колеса. Но эта компоновка далека от совершенства. Дело в том, что электропривод имеет очень важное преимущество перед любыми другими типами приводов – рекуперация. Рекуперация, это преобразование энергии движения в электрическую. Все мы с вами знаем, что энергия никуда не исчезает, она может только преобразовываться из одного вида в другой. Так вот, энергия движения (кинетическая энергия) при торможении автомобиля преобразуется в тепловую. Мы с вами просто нагреваем тормозные колодки, и это тепло отдаем атмосфере. То есть, по сути дела выбрасываем эту энергию. В электромобилях и в гибридах мы можем большую часть кинетики преобразовать в электричество и опять накопить его в аккумуляторе.
Гибридные автомобили всегда имеют кроме аккумулятора и двигатель внутреннего сгорания. Зачем? Для того чтобы удлинить расстояние езды на электромобиле. Дело в том, что даже современные аккумуляторы могут накопить энергии на 100, ну максимум на 200 километров пробега. Согласитесь, что это совсем немного. При использовании ДВС, в качестве дополнительного источника энергии можно удлинить путь до 800, а иногда и до 1000 километров без подзарядки аккумулятора и без дозаправки бензином или дизельным топливом.
Как правило, на авто такого типа (гибридных автомобилях) нет прямого воздействия двигателя на ведущие колеса. ДВС вращает генератор, который вырабатывает электрическую энергию, и уже эта энергия подается на электродвигатели либо на накопители энергии, если автомобиль едет по инерции или стоит (на светофоре, например). Накопителями энергии могут быть не только аккумуляторы, в последнее время все большей популярностью пользуются суперконденсаторы.
Двигатель на гибридных автомобилях может быть подключен к генератору, который вырабатывает электричество. Электричество это можно использовать для разгона (его обычно не хватает, аккумулятор плохо отдает электроэнергию на старте), или для зарядки аккумулятора, если авто на выбеге или стоянке. Крайне редко ДВС не подключен к генератору. При такой схеме ДВС помогает электродвигателю разгонять автомобиль.Где же экономия? Все дело в том, что при любой схеме подключения ДВС и электродвигателя, двигатель внутреннего сгорания всегда работает в номинальном режиме. В котором достигается максимальная экономия. КПД у ДВС всегда указывается для номинального режима и он колеблется от 36 до 42. Для малых оборотов этот КПД не превышает 7…10%.
Существует и более сложные системы. Вот, например, как взаимодействуют детали в современном гибридном автомобиле «Тойота Приус». Здесь ДВС может работать на генератор, а может и помогать вращать ведущие колеса через планетарный механизм. При торможении, мотор/генератор (MG2) преобразует кинетическую энергию в электрическую, заряжая аккумулятор. В результате чего достигается неплохая экономия. Да это сложно, но это того стоит. Расход у Тойоты-Приус около 3-х литров бензина на 100 километров.
Устройство тягового электродвигателя автомобиля
Устройство электродвигателя автомобиля зависит, от многих факторов. Электродвигатели для электромобилей могут быть как постоянного, так и переменного тока. В последнее время на машину такого типа ставят только двигатель переменного тока (синхронный или асинхронный). Первые электромоторы для автомобилей были, конечно, постоянного тока. Это и логично, потому как аккумулятор выдает постоянный ток, и двигатель электрический также постоянного тока. Их применяют и сейчас, но уже гораздо реже. Однако, все не так просто, как кажется на первый взгляд. Электродвигатели переменного тока гораздо экономичнее и надежнее. Выглядеть они могут точно так же как и электродвигатели постоянного тока. Разные типы электродвигателей имеют различную маркировку. AC – говорит о том, что этот двигатель переменного тока, DC – постоянного.
Принцип работы любого электродвигателя состоит во взаимодействии магнитных полей. Еще Фарадей на заре электричества заметил, что если проводник, по которому течет ток, поместить в постоянное магнитное поле, то этот проводник стремится вырваться из этого поля отклоняясь в ту или иную сторону в зависимости от направления движения тока. Если этих проводников много, и магнитное поле сильное, то и работа такого двигателя постоянного тока будет соответствующей.
В каждом электродвигателе есть ротор (его иногда называют якорь) и статор (его еще называют индуктором). Ротором является вращающееся часть, статором – не вращающееся (стационарная). И ротор и статор имеют обмотки состоящие из отдельных проводников. Для подачи электрического тока на вращающуюся часть двигателя существует коллектор (набор медных пластин собранных в цилиндр). От статора на коллектор ток передается при помощи специальных щеток. Взаимодействие магнитных полей заставляет ротор совершать вращение.
Электродвигатели переменного тока работают несколько по-другому. Статор создает магнитное поле, которое само вращается. Оно (поле) может увлекать за собой стальные предметы, то есть заставлять вращаться ротор. По этой причине на роторе обмотка не нужна. Но в этом случае скорость вращения ротора будет отставать от скорости вращения магнитного поля статора. Такие электродвигатели нарываются асинхронными.
Для того, чтобы точно знать с какой частотой вращается ротор и регулировать эту частоту, необходимо на роторе разместить электрическую обмотку. Такие электродвигатели называются синхронными. Но вновь появляется слабое звено электродвигателя – коллектор. Щетки изнашиваются и их нужно менять. Асинхронные двигатели в обслуживании не нуждаются.
На рисунке представлено два вида синхронных двигателей (с явными и неявными полюсами). Повторимся, что асинхронный двигатель отличается лишь тем, что на якоре нет обмотки.
При работе каждый электродвигатель нагревается. По этой причине тема охлаждения электрических машин очень важна. Система охлаждения может быть автономная и принудительная. На электродвигателях большегрузных автомобилей, например БелАЗ, охлаждение принудительное (воздух для охлаждения подается специальным вентилятором). У машин малого класса и легковых, на самом двигателе есть крыльчатка, которая продувает воздух через двигатель, тем самым охлаждая его.
Характеристики электродвигателей автомобильных
Характеристика электродвигателя, это соотношение его параметров к его цене. Лучше всего это представить в табличной форме. В таблице представлены популярные электродвигатели как постоянного DC, так и переменного AC тока. Напряжение у некоторых двигателей имеет несколько значений, это значит, что они способны работать на всех указанных напряжениях. Мощность N указана номинальная. Вращающий момент M, тоже при номинальном режиме работы. Частота вращения указана как максимально допустимая.
Характеристики электрического двигателя автомобиля невозможно сравнивать спонтанно. Для каждого конкретного случая, для определенного автомобиля, может быть разработан свой, оригинальный электродвигатель. Но электродвигатель переменного тока, а он здесь представлен один, явно отличается в лучшую сторону, от электродвигателей постоянного тока той же мощности, хотя бы по соотношению цены и вырабатываемой мощности (AC – 10.7 $/кВт, DC – 450 $/кВт).
Перспективы развития
Внедрение синхронных и асинхронных двигателей на автомобилях тормозилось медленным развитием электроники способной контролировать процессы в этих самых двигателя. Теперь эти барьеры снимаются, электроника становится надежной и относительно дешевой. По этой причине в скором времени электродвигатели переменного тока на электромобилях скорее всего будут внедряться практически повсеместно.
Изобретение новых конструкционных материалов позволяет повышать надежность и долговечность электродвигателей.
Что касается электромобилей в целом, то за ними большое будущее.
главное для хорошего электромобиля – облегчённый мотор / Хабр
Дизайн автора представляет новое слово в разработке электромоторов
В первое десятилетие XX века 38% всех машин в США работали на электричестве – и этот процент упал почти до нуля с ростом доминирования ДВС в 1920-х. Сегодняшнее стремление к сохранению энергии и уменьшению вредных выбросов вдохнуло в электромобили новую жизнь, но их высокая стоимость и ограниченный пробег сдерживают продажи.
Большая часть попыток решения этих проблем связана с улучшением батареек. Конечно же, улучшение систем хранения электроэнергии, будь то батарейки или топливные ячейки, должно оставаться частью любой стратегии улучшения электромобилей, но потенциал для улучшения есть и в другом фундаментальном компоненте машин: в моторе. Последние четыре года мы работали над новой концепцией тягового электродвигателя, используемого в электромобилях и грузовиках. Наша последняя разработка сильно улучшает эффективность по сравнению с обычными моделями – достаточно для того, чтобы сделать электромобили более практичными и доступными.
В прошлом году мы доказали работоспособность нашего мотора во всесторонних лабораторных тестах, и хотя до размещения его в автомобиле ещё далеко, у нас есть все основания полагать, что там он покажет себя так же хорошо. Наш мотор сможет увеличить пробег современных электромобилей, даже если мы не достигнем никакого прогресса в технологии батарей.
Чтобы понять сложность нашей задачи, необходимо вспомнить основы схемы электромотора (ЭМ). По сравнению с ДВС ЭМ проще, у них всего несколько критичных компонентов. Механика требует наличия корпуса. Он называется статором, поскольку не двигается. Необходим ротор, вращающий вал и создающий вращающий момент. Чтобы мотор работал, статор и ротор должны взаимодействовать при помощи магнетизма, превращая электрическую энергию в механическую.
Концепции моторов отличаются именно в области магнитных интерфейсов. В коллекторных моторах постоянного тока ток течёт через щётки, скользящие по коллекторному узлу. Ток идёт через коллектор и передаёт энергию намотке на роторе. Намотка отталкивается постоянными магнитами или электромагнитами статора. Щётки, скользя по коллектору, периодически меняют направление тока, и магниты ротора и статора отталкивают друг друга снова и снова, в результате чего ротор вращается. Иначе говоря, вращательное движение обеспечивается изменяющимся магнитным полем, производимым коллектором, соединяющим катушки с источником тока и циклически меняющим направление тока при поворотах ротора. Однако эта технология ограничивает вращающий момент и страдает от изнашивания; она уже не используется в тяговых ЭМ.
В современных электромобилях используется переменный ток от инвертера. Здесь динамическое вращающееся магнитное поле создаётся в статоре, а не в роторе. Это позволяет упростить схему ротора, который обычно более сложен, чем статор, что облегчает все задачи, связанные с разработкой ЭМ.
Моторов на переменном токе бывает два вида: асинхронные и синхронные. Мы сфокусируемся на синхронных, поскольку обычно они лучше и эффективнее работают.
Передовая система охлаждения проводит жидкость непосредственно через катушку (слева), а не через кожух мотора (справа)
Синхронные моторы тоже бывают двух видов. Более популярный – синхронная машина с постоянными магнитами [permanent-magnet synchronous machine, PMSM], использующая постоянные магниты, встроенные в ротор. Чтобы заставить его вращаться, в статоре организуется вращающееся магнитное поле. Это поле получается благодаря обмотке статора, соединённой с источником переменного тока. Во время работы полюса постоянных магнитов ротора захватываются вращающимся магнитным полем статора, что и заставляет ротор вращаться.
Такая схема, использующаяся в Chevrolet Volt и Bolt, в BMW i3, в Nissan Leaf и множестве других машин, может в пике достигать эффективности в 97%. Постоянные магниты обычно делают из редкоземельных элементов; яркие примеры – очень мощные неодимовые магниты, разработанные в 1982 году General Motors и Sumitomo.
Явнополюсные синхронные электродвигатели [Salient-pole synchronous machines, SPSM)] используют внутри ротора не постоянные, а электромагниты. Полюсы – это катушки в виде труб, направленные наружу, как спицы колеса. Эти электромагниты в роторе питаются источником постоянного тока, соединённым с ними через контактные кольца. Контактные кольца, в отличие от коллектора, не меняют направление тока. Северный и южный полюса ротора статичны, и щётки не изнашиваются так быстро. Как и в случае с PMSM, вращение ротора происходит из-за вращения магнитного поля статора.
Из-за необходимости питать электромагниты ротора через контактные кольца, у этих моторов обычно чуть ниже пиковая эффективность – в диапазоне от 94 до 96%. Преимущество над PMSM заключается в настраиваемости поля ротора, позволяющая ротору более эффективно вырабатывать крутящий момент на больших скоростях. Итоговая эффективность при использовании для разгона машины возрастает. Единственный производитель таких моторов в серийных авто – это Renault с его моделями Zoe, Fluence и Kangoo.
Электромобили необходимо строить с не только эффективными, но и лёгкими компонентами. Самый очевидный способ улучшить соотношение мощности к весу – уменьшить размер мотора. Однако такая машина выдаст меньший крутящий момент для одной и той же скорости вращения. Следовательно, чтобы получить больше энергии необходимо вращать мотор на более высоких скоростях. Сегодняшние электромобили работают на 12000 об/мин; в следующем поколении появятся моторы, работающие при 20000 об/мин; уже идут работы над моторами, работающие на скорости 30000 об/мин. Проблема в том, что чем выше скорость, тем сложнее получается редуктор – скорость вращения мотора слишком сильно превышает скорость вращения колёс. Из сложности редуктора следуют большие энергопотери.
Идеальный шторм: в авторском варианте (вверху) сила Лоренца и смещённая индуктивность (серый) суммируются в максимальное общее усилие (синее) равное 2. В обычном моторе (внизу) сумма двух сил – силы Лоренца и магнитное сопротивление (серый) дают общее усилие (синий), достигающее пика лишь в 1,76, при угле выбега ротора в 0,94 рад. Разница в этом примере составляет 14%
Второй подход к улучшению соотношения мощности к весу – увеличение силы магнитного поля, что увеличивает крутящий момент. В этом состоит смысл добавления железного сердечника к катушке – хотя это увеличивает вес, но одновременно усиливает плотность магнитного потока на два порядка. Следовательно, практически все современные ЭМ используют железные сердечники в статоре и роторе.
Однако, есть и минус. Когда сила поля увеличивается до определённого предела, железо теряет возможность усиления плотности потока. На это насыщение можно немного повлиять, добавляя присадки и изменяя процесс изготовления железа, но и самые эффективные материалы ограничены 1,5 В*с/м2 (вольт в секунду на квадратный метр, или тесла, Тл). Только очень дорогие и редкие вакуумные железно-кобальтовые материалы могут достигать плотностей магнитного потока 2 Тл или более.
И, наконец, третий стандартный путь увеличения крутящего момента – усиление поля через усиление тока, проходящего через катушки. Опять-таки, тут есть свои ограничения. Увеличьте ток, и увеличатся потери на сопротивление, уменьшится эффективность и появится тепло, способное повредить мотор. Для проводов можно использовать металл, лучше проводящий ток, чем медь. Серебряные провода также бывают, но их применение в таком устройстве было бы абсурдно затратным.
Единственный практический способ увеличить ток – контролировать тепло. Передовые охлаждающие решения проводят жидкость прямо рядом с катушками, а не дальше от них, снаружи статора.
Все эти шаги помогают улучшать соотношение веса к мощности. В гоночных электромобилях, где стоимость не имеет значения, моторы могут достигать 0,15 кг на киловатт, что сравнимо с лучшими ДВС из Формулы 1.
Мы со студентами разрабатывали и создавали такие высокопроизводительные электромоторы для автомобиля, участвовавшего в студенческой Формуле три года назад. Мы создавали моторы в нашей лаборатории в Электротехническом институте Технологического института Карлсруэ. Каждый год команда создавала новую машину с улучшенным мотором, редуктором и силовой электроникой. В машине четыре мотора, по одному на колесо. Каждый имеет всего 8 см в диаметре, 12 см в длину и 4,1 кг веса, и производит 30 кВт на постоянной основе и 50 кВт в пике. В 2016 году наша команда выиграла чемпионат мира.
Так что это и правда можно сделать, если стоимость вас не волнует. Главный вопрос – можно ли использовать такие улучшающие эффективность технологии в массовом производстве, в машине, которую могли бы купить вы? Мы создали такой мотор, так что ответ на вопрос – положительный.
Мы начали с простой идеи. Электромоторы хорошо работают как в роли моторов, так и в роли генераторов, хотя для электромобилей такая симметрия не особенно нужна. Для автомобиля нужен мотор, работающий лучше в роли мотора, чем в роли генератора – последняя используется только для заряда батарей при рекуперативном торможении.
Чтобы понять эту идею, рассмотрим работу мотора PMSM. В таком моторе движение создают две силы. Во-первых, сила, возникающая благодаря постоянным магнитам в роторе. Когда ток идёт через медные катушки статора, они создают магнитное поле. Со временем ток переходит из одной катушки в другую и заставляет магнитное поле вращаться. Вращающееся поле статора притягивает постоянные магниты ротора, и тот начинает двигаться. Этот принцип основан на силе Лоренца, влияющей на движение заряженной частицы в магнитном поле.
Но современные ЭМ получают часть энергии от магнитного сопротивления – силы, притягивающей блок железа к магниту. Вращающееся поле статора притягивает как постоянные магниты, так и железо ротора. Сила Лоренца и магнитное сопротивление работают бок о бок, и – в зависимости от схемы мотора – примерно равны друг другу. Обе силы примерно равны нулю, когда магнитные поля ротора и статора выравниваются. С увеличением угла между ними мотор вырабатывает механическую энергию.
В синхронном моторе поля статора и ротора работают совместно, без задержек, существующих в асинхронных машинах. Поле статора находится под определённым углом к полю ротора, который можно регулировать во время работы для достижения наибольшей эффективности. Оптимальный угол для создания вращательного момента при заданном токе можно вычислять заранее. Затем он подстраивается, по мере изменения тока, к силовой электронной системе, дающей переменный ток на намотку статора.
Но вот, в чём проблема: при движении поля статора по отношению к положению ротора сила Лоренца и магнитное сопротивление то увеличиваются, то уменьшаются. Сила Лоренца увеличивается по синусоиде, достигающей пика на 90 градусов от точки отсчёта (от точки, в которой поля статора и ротора выровнены). Сила манитного сопротивления циклично меняется в два раза быстрее, поэтому достигает пика на 45 градусах.
Поскольку силы достигают максимума в разных точках, максимальная сила мотора меньше, чем сумма его частей. Допустим, у какого-то определённого мотора в определённый момент работы оказывается, что оптимальным углом для максимума суммарной силы будет 54 градуса. В этом случае этот пик будет на 14% меньше, чем суммарные пики двух сил. Это наилучший из возможных компромиссов данной схемы.
Если бы мы могли переделать этот мотор так, чтобы две силы достигали максимума в одной точке цикла, мощность мотора возросла бы на 14% совершенно бесплатно. Вы бы потеряли только эффективность работы в роли генератора. Но мы, как будет показано далее, нашли способ восстановить и эту способность, чтобы мотор лучше восстанавливал энергию при торможении.
Разработка идеально выравнивающего поля мотора – дело непростое. Проблема состоит в комбинации PMSM и SPSM в новую гибридную схему. В результате получается гибридный синхронный мотор со смещённой осью магнитного сопротивления. По сути, этот мотор использует как провода, так и постоянные магниты, для создания магнитного поля в роторе.
Другие пытались работать в этом направлении, а затем отбросили эту идею – но они хотели использовать постоянные магниты только для усиления электромагнитного поля. Наша инновация состоит в использовании магнитов только для придания точной формы полю, чтобы оптимально выровнять две силы – силу Лоренца и силу магнитного сопротивления.
Основная проблема в разработке состояла в поиске такой конструкции ротора, которая могла бы менять форму поля, оставаясь при этом достаточно прочной для того, чтобы вращаться на высоких скоростях, не ломаясь при этом. В центре нашей схемы – многослойная структура ротора, несущего медную намотку на железном сердечнике. Мы приклеили постоянные магниты к полюсам сердечника; дополнительные шипы препятствуют их вылету. Чтобы всё удерживалось на месте, мы применили крепкие и лёгкие титановые штифты, пропущенные через электромагнитные полюса ротора, притянутые гайками к кольцам из нержавеющей стали.
Мы также нашли способ обойти недостаток первоначального мотора, уменьшение крутящего момента во время работы генератором. Теперь мы можем менять направление поля в роторе так, что генерация во время рекуперативного торможения работает так же эффективно, как режим мотора.
Этого мы добились, меняя направление тока в намотке ротора во время работы в режиме генератора. Работает это следующим образом. Представьте себе первоначальный вид ротора. Если идти по его периметру, вы обнаружите определённую последовательность северных и южных полюсов электромагнитных (Е) и постоянных магнитных (P) источников: NE, NP, SE, SP. Эта последовательность повторяется столько раз, сколько в моторе пар полюсов. Меняя направление тока в обмотке, мы меняем ориентацию электромагнитных полюсов, и только их, в результате последовательность превращается в SE, NP, NE, SP.
Изучив две этих последовательности, вы увидите, что вторая похожа на первую, идущую задом наперёд. Это значит, что ротор можно использовать в режиме мотора (первая последовательность) или в режиме генератора (вторая), когда ток в роторе меняет направление на противоположное. Таким образом наша машина работает более эффективно, чем обычные моторы, как в роли мотора, так и в роли генератора. На нашем прототипе изменение направления тока занимает не более 70 мс, что достаточно быстро для автомобилей.
В прошлом году мы построили прототип мотора на верстаке и подвергли его тщательным проверкам. Результаты ясны: при той же самой силовой электронике, параметрах статора и других ограничениях обычного мотора, машина способна выдавать почти на 6% больше крутящего момента и на 2% больше эффективности в пике. В цикле езды результаты ещё лучше: ей требуется на 4,4% меньше энергии. Это значит, что машина, проезжающая на одной зарядке 100 км, проехала бы с этим мотором 104,4 км. Дополнительные километры достаются нам почти задаром, поскольку в нашей схеме есть всего несколько дополнительных частей, заметно менее дорогих, чем дополнительные батарейки.
Мы связались с несколькими производителями оборудования, и они нашли нашу концепцию интересной, хотя пройдёт ещё много времени до того, как вы увидите один из таких асимметричных моторов в серийном автомобиле. Но появившись, в результате он станет новым стандартом, поскольку извлечение всей возможной пользы из имеющейся у вас энергии стоит в приоритете как для автопроизводителей, так и для всего нашего общества.
Электромоторы | Сайт об электромобилях
| Модель | Питание | U, (В) | Nном, (КВт) | Mном, (Н*м) | Nмакс, (КВт) | Nмакс, (Н*м) | RPM, (об/мин) | Вес (кг) | Примерная стоимость (USD) | Примечания |
|---|---|---|---|---|---|---|---|---|---|---|
| Perm-Motor PMG-132 | DC | 72 | 7.2 | 20.5 | 14.5 | 38.5 | 3480 | 11 | 1000 | |
| LEMCO LEM-200 | DC | 48 | 4.3 | 14.2 | 17.2 | 57 | 2880 | 11 | 1800 | Brushless Etek | AC | 36 | 3.6 | 13.6 | 10.8 | 40.9 | 2520 | 10.2 | 430 | цена контроллера на 24-36В 470USD |
| Perm-Motor PMS-156 | AC | 96 | 21.3 | 33.9 | 46 | 73.2 | 6000 | 25.4 | ? | может поставляться с контроллером и редуктором |
| ADC #203-06-4001A | DC | 120 | 16.3 | 23.95 | 28.0 | 45.3 | 6500 | 66.5 | 1450 | версия с двумя шпинделями |
| ADC FB1-4001 | DC | 144 | 21.5 | 34.2 | 36.8 | 81.9 | 6000 | 66.5 | 1700 | — |
| Golden Motor HPM3000B | DC | 48/72 | 3 | 10 | 6 | 25 | 5000 | 8 | 429 | 2 типа вала: шпоночный паз и шлицевый вал 2 типа охлаждения: воздушное и жидкостное. Контроллер VEC200 стоит 323$ |
| Golden Motor HPM5000B | DC | 48/72/96 | 5 | 14 | 10 | 24 | 6000 | 11 | 655 | 2 типа вала: шпоночный паз и шлицевый вал 2 типа охлаждения: воздушное и жидкостное. Контроллер VEC300 стоит 551$ |
| Golden Motor HPM-10KW | DC | 48/72/96/120 | 10 | 30 | 20 | 60 | 6000 | 17 | 1095 | 2 типа вала: шпоночный паз и шлицевый вал 2 типа охлаждения: воздушное и жидкостное. Контроллер HPC500 стоит 804$ |
| Golden Motor HPM-20KW | DC | 72/96/120 | 20 | 80 | 50 | 160 | 5000 | 39 | 2606 | вал: шпоночный паз, тип охлаждения: жидкостное. Контроллер HPC700 стоит 1236$ |
- U — Напряжение
- Nном — Номинальная мощность
- Mном — Номинальный крутящий момент
- Nмакс — Максимальная мощность
- Mмакс — Максимальный крутящий момент
- RPM — Скорость вращения шпинделя
Copyright © Дмитрий Спицын, 2007-2017.
момент вырос в 2–3 раза — журнал За рулем
Разработкой электродвигателя занимались отец и сын.
Материалы по теме
Компания Linear Labs заявила о разработке электродвигателя Hunstable с «турбиной», крутящий момент которого в несколько раз больше, чем у электромоторов аналогичного размера и с тем же энергопотреблением.
«Основной характеристикой этого двигателя является то, что при очень низких оборотах и при одинаковом размере, весе, объеме и количестве потребляемой энергии он имеет в два-три раза больший крутящий момент, чем любой электромотор в мире», — говорится в заявлении компании.
Разработкой электродвигателя занимались отец и сын: инженер Фред Ханстейбл, который проектировал атомные электростанции, и Брэд Ханстейбл, который помог создать потоковый сервис Ustream, проданный IBM в 2016 году за 150 миллионов долларов.
Изначально Linear Labs решили создать линейный генератор, который мог бы вырабатывать достаточную мощность от низкоскоростного вращающегося вала — ветряка или водяного колеса. Разработка получила 25 патентов и оказалась весьма эффективной.
В электродвигателе на магнитах один компонент вращается внутри другого. Представьте, что маленькая банка вращается внутри большой. Для создания большего крутящего момента нужно подать на двигатель больше энергии или создать мотор большего размера. Linear Labs нашла другой путь: объединила осевой и радиальный потоки в одном двигателе. Проще говоря, это четыре ротора, окружающие статор. Центральный ротор вращается внутри статора, создавая один источник крутящего момента. Второй ротор вращается снаружи статора, создавая второй источник. Два дополнительных ротора расположены на левом и правом концах статора. По сути, это два концентрических радиальных двигателя с двумя осевыми.
При производстве нового электромотора требуется на 30% меньше меди. Конструкция также исключает концевые обмотки, которые лежат вне статора, генерируя тепло.
На сегодняшний день Linear Labs подписала несколько соглашений на производство своего «турбированного» электродвигателя: с производителем скутеров, со
Как работают электромобили?
Полностью электрические транспортные средства (электромобили), также называемые аккумуляторными электромобилями, имеют электродвигатель вместо двигателя внутреннего сгорания. В транспортном средстве используется большая тяговая аккумуляторная батарея для питания электродвигателя, и его необходимо подключать к розетке или зарядному устройству, также называемому питающим оборудованием для электромобилей (EVSE). Поскольку он работает от электричества, автомобиль не выпускает выхлопных газов из выхлопной трубы и не содержит типичных компонентов жидкого топлива, таких как топливный насос, топливопровод или топливный бак.Узнайте больше об электромобилях.
Изображение в высоком разрешенииКлючевые компоненты полностью электрического автомобиля
Батарея (полностью электрическая вспомогательная): В транспортном средстве с электроприводом вспомогательная батарея обеспечивает электроэнергией аксессуары транспортного средства.
Порт зарядки: Порт зарядки позволяет автомобилю подключаться к внешнему источнику питания для зарядки тягового аккумулятора.
Преобразователь постоянного тока в постоянный: Это устройство преобразует мощность постоянного тока высокого напряжения от тягового аккумуляторного блока в мощность постоянного тока низкого напряжения, необходимую для работы аксессуаров транспортного средства и зарядки вспомогательной батареи.
Тяговый электродвигатель: Используя мощность от тягового аккумулятора, этот электродвигатель приводит в движение колеса автомобиля. В некоторых транспортных средствах используются мотор-генераторы, которые выполняют функции привода и регенерации.
Бортовое зарядное устройство: Принимает входящую электроэнергию переменного тока, подаваемую через порт зарядки, и преобразует ее в мощность постоянного тока для зарядки тягового аккумулятора.Он также обменивается данными с зарядным оборудованием и отслеживает характеристики аккумулятора, такие как напряжение, ток, температуру и состояние заряда, во время зарядки аккумулятора.
Контроллер силовой электроники: Этот блок управляет потоком электроэнергии, подаваемой тяговой батареей, регулируя скорость электрического тягового двигателя и создаваемый им крутящий момент.
Тепловая система (охлаждение): Эта система поддерживает надлежащий диапазон рабочих температур двигателя, электродвигателя, силовой электроники и других компонентов.
Тяговый аккумулятор: Накапливает электроэнергию для использования тяговым электродвигателем.
Трансмиссия (электрическая): Трансмиссия передает механическую энергию от тягового электродвигателя на привод колес.
| 1. | КРАТКОЕ ОПИСАНИЕ И ВЫВОДЫ |
| 1.1. | Цель и объем данного отчета |
| 1.2. | Методология |
| 1.3. | Первичные выводы: рынки |
| 1.4. | Основные выводы: технология |
| 1.5. | Потребности в двигателях по типу трансмиссии |
| 1.6. | Прогнозы 2019-2030 гг. |
| 1.6.1. | Обзор прогноза на 2019-2030 годы (прикладные секторы) — количество автомобилей тыс. |
| 1.6.2. | Обзор прогнозов на 2019-2030 гг. (Прикладные секторы) — млрд. Вт |
| 1.6.3. | Прогнозы на 2019-2030 годы: Строительство — количество автомобилей тыс. |
| 1.6.4. | Прогнозы на 2019-2030 годы: Строительство — млрд .Вт |
| 1.6.5. | Прогнозы на 2019-2030 годы: Сельское хозяйство — кол-во тыс. |
| 1.6.6. | Прогнозы на 2019-2030 гг .: Сельское хозяйство — млрд. Вт |
| 1.6.7. | Прогнозы на 2019-2030 гг .: Горнодобывающая промышленность — количество машин тыс. |
| 1.6.8. | Прогнозы на 2019-2030 гг .: Горнодобывающая промышленность — млрд. Вт |
| 1.6.9. | Прогнозы на 2019-2030 гг .: Интралогистика — количество автомобилей тыс. |
| 1.6.10. | Прогнозы на 2019-2030 гг .: Интралогистика — млрдВт |
| 1.6.11. | Прогнозы на 2019-2030 гг .: Аэропорт и внедорожник — количество автомобилей тыс. |
| 1.6.12. | Прогнозы на 2019-2030 гг .: Аэропорт и внедорожник — млрд. Долл. |
| 1.6.13. | Прогнозы на 2019-2030 гг .: Автобусы — кол-во автомобилей тыс. |
| 1.6.14. | Прогнозы на 2019-2030 гг .: Автобусы — млрд .Вт |
| 1.6.15. | Прогнозы на 2019-2030 гг .: Грузовые автомобили — количество автомобилей тыс. |
| 1.6.16. | Прогнозы на 2019-2030 гг .: Грузовые автомобили — млрд .Вт |
| 1.6.17. | Прогнозы на 2019-2030 гг .: Количество автомобилей тыс. |
| 1.6.18. | Прогнозы на 2019-2030 гг .: Автомобили- bnW |
| 1.6.19. | Прогнозы на 2019-2030 гг .: Легкие электромобили — количество автомобилей тыс. |
| 1.6.20. | Прогнозы на 2019-2030 годы: Легкие электромобили — млрд .Вт |
| 1.6.21. | Прогнозы на 2019-2030 гг .: Боевая техника тыс. |
| 1.6.22. | Прогнозы на 2019-2030 гг .: Военный сектор |
| 1.6.23. | Прогнозы на 2019-2030 годы: Дроны — количество машин тыс. |
| 1.6.24. | Прогнозы на 2019-2030 гг .: Дроны — млрд. Долларов |
| 1.6.25. | Прогнозы на 2019-2030 гг .: ВС — количество машин тыс. |
| 1.6.26. | Прогнозы на 2019-2030 гг .: Самолет — млрд. Долл. |
| 1.6.27. | Прогнозы на 2019-2030 гг .: Поезда — кол-во автомобилей тыс. |
| 1.6.28. | Прогнозы на 2019-2030 гг .: Поезда — млрд ватт |
| 1.6.29. | Прогнозы на 2019-2030 гг .: Морской — количество автомобилей тыс. |
| 1.6.30. | Прогнозы на 2019-2030 гг .: морской — млрд .Вт |
| 1.6.31. | Прогнозы на 2019-2030 гг .: Дом и прочее — количество автомобилей тыс. |
| 1.6.32. | Прогнозы на 2019-2030 гг .: Дом и прочее — млрд ватт |
| 1.7. | Разделение технологии двигателей EV на 2020 и 2030 годы |
| 1.7.1. | Строительный сектор |
| 1.7.2. | АПК |
| 1.7.3. | Горнодобывающая промышленность и внутренняя логистика |
| 1.7.4. | Автобусы и грузовики |
| 1.7.5. | Автомобили и подобные им автомобили |
| 1.7.6. | Двухколесный, военный, дрон |
| 1.7.7. | Пилотируемые самолеты, аккумуляторные поезда |
| 1.7.8. | Морской, домашний робот, прочее |
| 1.8. | Объяснение рентабельности автомобилей по секторам транспорта 2030 |
| 1.9. | Тенденции изменения стоимости неодима создают проблемы |
| 1.9.1. | Варка лягушки |
| 1.9.2. | Постоянные магниты более популярны, но в конечном итоге ненужны? |
| 1.10. | Региональные продажи |
| 1.10.1. | Китай |
| 1.10.2. | Европа |
| 1.10.3. | США |
| 1.11. | Автомобильные технологии для автомобилей: доли на мировом рынке электромобилей |
| 2. | ВВЕДЕНИЕ |
| 2.1. | Конструкция электродвигателя: в основном с внутренним ротором |
| 2.2. | Сравнение трех принципов работы |
| 2.3. | Подтипы электродвигателей, важные для электромобилей |
| 2.4. Преимущества двигателя | EV по сравнению с |
| 2.5. | Приложения EV для трех типов двигателей |
| 2.6. | Выбор двигателя для электромобилей и фургонов |
| 2.7. | Электродвигатели других электромобилей |
| 2.8. | Выбор технологий — подробный обзор |
| 2.8.1. | Получим технический |
| 2.8.2. | Более глубокое погружение |
| 2.8.3. | Спектр выбора: преимущества, проблемы, области применения |
| 2.8.4. | PMAC против технологии BLDC |
| 2.8.5. | Формат проводника, оптимизация, интеграция |
| 3. | ОДИННАДЦАТЬ ВАЖНЫХ ТЕНДЕНЦИЙ В EV MOTORS 2020-2030 гг. |
| 3.1. | Обзор |
| 3.2. | Одиннадцать трендов |
| 3.2.1. | Процент увеличения стоимости ТС |
| 3.2.2. | Интеграция |
| 3.2.3. | Многофункциональный |
| 3.2.4. | Распространение: у автомобиля больше двигателей |
| 3.2.5. | Требуются двигатели гораздо большего размера |
| 3.2.6. | Вертикальная интеграция: производители автомобилей разрабатывают собственные двигатели |
| 3.2.7. | Меньше охлаждения |
| 3.2.8. | Повышение напряжения: |
| 3.2.9. | Новые принципы электродвижения |
| 3.2.10. | Новые материалы: конструкционная электроника |
| 3.2.11. | Приобретения и партнерства |
| 4. | ПРОБЛЕМЫ КОНСТРУКЦИИ ДВИГАТЕЛЯ |
| 4.1. | Тенденция к расширению возможностей |
| 4.2. | Dana Corporation — TM4 |
| 4.3. | Опыт компании и дизайнерские предпочтения |
| 4.4. | Уроки Tesla, лидера автомобильного рынка |
| 4.4.1. | Обзор |
| 4.4.2. | Пытаемся поймать Tesla |
| 4.4.3. | Тесла 3 Коммутируемый электродвигатель с постоянным магнитом |
| 4.4.4. | Рекомендации по проектированию двигателей от Tesla |
| 4.5. | Прогресс с переключаемым сопротивлением |
| 4.5.1. | Патентный анализ |
| 4.5.2. | Ассистент синхронного сопротивления Visedo |
| 4.5.3. | Современные электрические машины |
| 4.5.4. | Eco Motor Works Canada |
| 4.5.5. | Nidec Japan |
| 4.6. | Асинхронный двигательEV опережает |
| 4.6.1. | CCE Thyssen Krupp |
| 4.6.2. | Tesla улучшает асинхронные двигатели |
| 4.7. | Гибридные автомобили 48 В: очень большой рынок двигателей |
| 4.7.1. | Базовый «мягкий гибрид» на 48 В: более умный двигатель, более мощная батарея — ключевые моменты. |
| 4.7.2. | Примеры и сроки для автомобилей |
| 4.7.3. | Текущие дополнительные улучшения по умеренной цене |
| 4.7.4. | Функции и архитектура |
| 4.7.5. | Полный гибрид 48 В может быть примитивным или максимальным |
| 4.7.6. | Континенталь |
| 4.7.7. | Полногибридный грузовик Eaton 48V |
| 4.7.8. | Mercedes встроенный стартер-генератор ISG мягкий гибрид |
| 4.7.9. | Audi |
| 4.7.10. | Бентли |
| 4.7.11. | Ягуар Ленд Ровер |
| 4.7.12. | Schaeffler |
| 4.7.13. | Valeo, Hyundai Mobis, Delphi, Tenneco, Bosch, IFEVS |
| 5. | ВЫСОКОЕ ОТНОШЕНИЕ МОЩНОСТИ К ВЕСУ |
| 5.1. | Погоня за высоким соотношением мощности к массе: история |
| 5.2. | Патентный анализ: двигатели с осевым потоком |
| 5.3. | Роллс-Ройс, Сименс, Яса |
| 5.4. | Требование AVID EVO 10 кВт / кг: заказ на 70 миллионов долларов |
| 5.5. | Equipmake перенастроил двигатель с постоянными магнитами |
| 5.6. | Осевой поток Magnax |
| 6. | КОЛЕСНЫЕ ДВИГАТЕЛИ СЕЙЧАС ПОПУЛЯРНЫЕ |
| 6.1. | Обзор |
| 6.1.1. | Наконец-то широкое распространение: BYD, Olli |
| 6.1.2. | Колесо Protean на 360 градусов |
| 6.2. | Осевой поток светового года в колесе |
| 6.2.1. | В ассортименте продаются автомобили |
| 6.2.2. | Без аккумулятора с колесными двигателями |
| 6.3. | Elaphe, позволяющий 1000 км по суше |
| 6.4. | Nidec Japan |
| 7. | ТЯЖЕЛЫЕ ЭЛЕКТРИЧЕСКИЕ ДВИГАТЕЛИ ВНЕДОРОЖНЫЕ |
| 7.1. | Обзор: потребности отличаются от дорожных |
| 7.2. | Гибридный мини-экскаватор Takeuchi TB216H |
| 7.3. | Полностью электрический экскаватор Caterpillar |
| 7.4. | Электроэкскаватор Hyundai |
| 7.5. | Асинхронный / индукционный в горных транспортных средствах |
| 7.6. | Что дальше? |
| 7.7. | Военный обзор |
| 7.8. | Транспортные средства от Balquon, Alke, Polaris, Columbia, Hummer, Green Wheel, Quantum FCT |
| 7.9. | Военные автомобили большего размера от BAE Systems, Министерства обороны США, Millenworks, Oshkosh |
| 7.10. | Последний прогресс |
| 7.10.1. | Автономные внедорожники |
| 7.10.2. | Бронемашина Otokar Турция |
| 7.10.3. | Коммунальный вездеход Nikola USA |
| 7.10.4. | TARDEC USA |
| 7.10.5. | Arquus на замену Humvee Sweden |
| 7.10.6. | GE, DARPA и QinetiQ US UK |
| 7.10.7. | GM Defense, Chevrolet Silverado USA |
| 7.10.8. | Основные боевые танки на топливных элементах? |
| 7.11. | Электрические лодки и корабли: долгая история? |
| 7.11.1. | Сегменты морского рынка |
| 7.11.2. | Torqeedo: мощность до 100 кВт! |
| 7.11.3. | Внутренние и подвесные двигатели Torqeedo |
| 7.11.4. | Ключевой рынок роста: суда C&I |
| 7.11.5. | Фокус регулирования выбросов |
| 7.11.6. | Зоны контроля выбросов (ECA) |
| 7.11.7. | Беспрецедентный глобальный лимит серы |
| 7.11.8. | Первый в мире контейнеровоз с полностью электрическим приводом |
| 8. | ТЕХНОЛОГИЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ |
| 8.1. | Обзор |
| 8.2. | Основные тенденции |
| 8.3. | Прямой привод или трансмиссия |
| 8.4. | Обзор трансмиссий Ultimate |
| 8.5. | Силовые полупроводники являются ключевыми |
| 8.6. | Примеры |
| 8.7. | Распространение ведет к упрощению |
| 8.7.1. | Ликвидация управления двигателем |
| 8.7.2. | Общие компоненты: Берлинский университет, Infineon |
| 8.7.3. | Двунаправленная система наддува и тяги (BCTS) Continental |
| 8.8. | Future 48V Mild Hybrid Motor Controllers: TT / AB Microelectronics |
| 1. | РЕЗЮМЕ И ВЫВОДЫ |
| 1.1 . | Прогнозы тяговых электродвигателей номеров |
| 1.1. | Количество тяговых двигателей электромобилей в мире, 2012-2023 гг., Тыс. |
| 1.1. | Количество тяговых двигателей электромобилей в мире, 2012-2023 гг., Тыс. |
| 1.2. | Рыночная стоимость автомобилей, млн. Долл. США, уплаченных производителем автомобилей 2012-2023 гг. |
| 1.2. | Количество автомобилей (тыс.) 2012-2023 гг. |
| 1.2. | Мировой рынок стоимости тяговых двигателей для транспортных средств |
| 1.3. | Определение и справочная информация |
| 1.3. | Число тяговых двигателей в многомоторных транспортных средствах 2012-2023 гг. (В миллионах) и процентная доля тяговых двигателей всех транспортных средств округлено |
| 1.3. | Расположение двигателей, проданных в 2022 году в транспортных средствах, в которых они установлены, в миллионах двигателей и в процентах от всех двигателей с округлением всех цифр |
| 1.4. | Номера поставщиков указаны по континентам |
| 1.4. | Доля электромобилей с более чем одним двигателем 2012-2023 гг. |
| 1.4. | Форма двигателей |
| 1.5. | Расположение двигателей |
| 1.5. | Количество электромобилей с более чем одним электродвигателем, 2012-2023 гг., В тысячах и процентная доля всех электромобилей, округленное значение |
| 1.5. | Номера поставщиков тяговых двигателей по странам |
| 1.6. | Целевые приложения вверху по сравнению с разделением рыночной стоимости в 2012 году по центру, а в 2022 году внизу |
| 1.6. | Среднее количество двигателей на многомоторное транспортное средство 2012-2023 гг. |
| 1.6. | Уникальное крупное новое исследование |
| 1.7. | Тупой разговор с двигателем в EV Japan |
| 1.7. | Доля электромобилей с одним двигателем 2012-2023 гг. |
| 1.7. | Поставщики тяговых двигателей для транспортных средств — разделены на количество, предлагающее асинхронные, синхронные и и те, и другие, где указано |
| 1.8. | Количество обследованных транспортных средств, в которых упоминалось использование щеточных синхронных двигателей постоянного тока, в разбивке по типам транспортных средств |
| 1.8. | Количество электромобилей с одним электродвигателем, т. Е. Количество моторов у одномоторных транспортных средств в тысячах |
| 1.8. | Импульсные реактивные двигатели — революционная технология тяговых двигателей? |
| 1.8.1. | Bosch — Renault Zoe |
| 1.9. | Три способа, которыми производители тяговых двигателей стремятся избежать использования редкоземельных элементов |
| 1.9. | Цена тягового двигателя (ов) для производителя транспортного средства в тыс. Долларов США за транспортное средство |
| 1.9. | Количество отобранных автомобилей с одним, двумя, тремя или четырьмя тяговыми электродвигателями |
| 1.9.1. | Синхронные двигатели без магнитов — реактивное сопротивление |
| 1.9.2. | Двигатели синхронные с новыми магнитами |
| 1.9.3. | Двигатели асинхронные |
| 1.9.4. | Еще впереди |
| 1.10. | Критерии принятия колесных двигателей |
| 1.10. | Заводская цена электромобилей, в тысячах долларов США, проданных во всем мире, 2012-2023 гг., С разбивкой по отраслям, округленная |
| 1.10. | Рыночная стоимость автомобилей, млн. Долл. США, уплаченные производителем транспортных средств 2012-2023 гг. |
| 1.11. | Сводка предпочтений тягово-моторной техники для автотранспорта |
| 1.11. | Заводская стоимость электромобилей, проданных по всему миру, в миллиардах долларов США, в 2012-2023 годах, с разбивкой по отраслям, округленная |
| 1.11. | Интеграция двигателя и других частей |
| 1.12. | Консолидация отрасли |
| 1.12. | Стендовые стенды, касающиеся реактивных тяговых двигателей |
| 1.12. | Преимущества против недостатков щеточных и бесщеточных тяговых двигателей для современных транспортных средств |
| 1.13. | Наиболее вероятные победители и проигравшие в ближайшее десятилетие |
| 1.13. | Опытный снегоход Joanneum (Австрия) |
| 1.13. | Промышленное сотрудничество 2013 |
| 1.13.1. | Визедо: Axco Motors: Semikron: WIMA: Метрополия Хельсинки Университет прикладных наук: Power Conversion B.V |
| 1.13.2. | Yasa Motors: Sevcon: Westfield Sportcars: Potenza Technology |
| 1.14. | Приоритет промышленного и коммерческого транспорта |
| 1.14. | Автомобиль Streetscooter и развозчик (Германия) |
| 1.14. | Номера поставщиков указаны по континентам |
| 1.15. | Номера поставщиков тяговых двигателей, перечисленные по странам в алфавитном порядке |
| 1.15. | Tesla Model S — толкатель (США) |
| 1.15. | Уроки eCarTec Munich Октябрь 2013 г. |
| 1.16. | Hyundai 1X 35 Опытный автомобиль на топливных элементах (Корея) |
| 1.16. | Приложения, на которые нацелена наша выборка поставщиков двигателей в сравнении с разделением рынка, перечисленные в порядке размера рынка 2012 г. |
| 1.17. | Поставщики тяговых двигателей для транспортных средств — разделены на количество, предлагающее асинхронные, синхронные и и те, и другие, где указано |
| 1.17. | Mercedes B Class, называемый Tesla Mercedes, потому что эта компания, инвестиция Daimler, помогла в его создании. (Германия) |
| 1.18. | Автомобиль Romet (Польша) |
| 1.18. | Поставщики, предлагающие щеточные, бесщеточные двигатели и синхронные двигатели обоих типов, где указаны |
| 1.19. | Распределение образца ТС по сферам применения |
| 1.19. | Такси TukTuk (Нидерланды) |
| 1.20. | Nissan Taxi (Япония) |
| 1.20. | Транспортные средства с асинхронной, синхронной или обоими опциями по категориям по количеству и процентной доле категории, перечисленные в порядке уменьшения асинхронности в процентном отношении |
| 1.21. | 212 моделей электромобилей, проанализированных с разбивкой по категориям на предмет% асинхронности, мощности и крутящего момента их электрических тяговых двигателей, и где наиболее часто встречается интенсивное или грубое использование. Номинальная мощность и тяговые характеристики увеличены. |
| 1,21. | Зеленый автомобиль Go iCaro (Китай) |
| 1.22. | Автомобиль Mercedes SLS AMG (Германия) |
| 1.22. | Доля старых и заброшенных моделей в обследовании, в которых используются асинхронные или синхронные двигатели |
| 1.23. | Количество обследованных транспортных средств, в которых упоминалось использование щеточных синхронных двигателей постоянного тока, в разбивке по типам транспортных средств |
| 1.23. | Концепт Oprema (Словения) |
| 1.24. | Прочие характеристики двигателя, заявленные производителями транспортных средств |
| 1.25. | Количество отобранных автомобилей с одним, двумя, тремя или четырьмя тяговыми электродвигателями |
| 1.26. | Заводская цена электромобилей, в тысячах долларов США, проданных по всему миру, 2012-2023 гг., С разбивкой по отраслям, округленная |
| 1.27. | Заводская стоимость электромобилей, в миллиардах долларов США, проданных во всем мире, 2012-2023 гг., С разбивкой по отраслям, округленная |
| 2. | ВВЕДЕНИЕ |
| 2.1. | История тяговых электродвигателей |
| 2.1. | 2000-летняя история тяговых электродвигателей и родственных им технологий |
| 2.1. | Cri Cri моторы |
| 2.2. | Несколько электродвигателей на беспилотном летательном аппарате НАСА, работающем на солнечной энергии, для верхних слоев атмосферы |
| 2.2. | Основные варианты выбора технологии тяговых двигателей для электромобилей в следующем десятилетии |
| 2.2. | Типы двигателей, предпочитаемые в электромобилях |
| 2.2.1. | Краткое описание типов тяговых двигателей |
| 2.2.2. | Двигатели тяговые асинхронные |
| 2.2.3. | Размер и количество двигателей |
| 2.2.4. | Формы двигателя |
| 2.2.5. | Синхронные тяговые двигатели с постоянными магнитами |
| 2.2.6. | Работа со стоимостью магнита |
| 2.2.7. | Основные варианты электромоторов будущего |
| 2.2.8. | Осевой поток и двигатели с радиальным потоком |
| 2.3. | Сложные двигатели восполняют пробелы в производительности |
| 2.3. | Сравнение потенциальных и реальных технологий тяговых электродвигателей |
| 2.3. | Велосипедная ступица ротор двигателя левый и статор правый |
| 2.3.1. | Усовершенствованный вариант асинхронного двигателя — Chorus Motors |
| 2.3.2. | Усовершенствованный синхронный двигатель с постоянными магнитами — Protean Electric |
| 2.3.3. | Положение двигателя |
| 2.3.4. | Относительные достоинства моторных позиций в электровелосипедах и электровелосипедах |
| 2.3.5. | Фраунгофера IFAM |
| 2.4. | Остающиеся проблемы |
| 2.4. | Осевой поток в мотор-колесе, приводящем в движение велосипед и гребной винт |
| 2.4. | Сравнение двигателей с внешним и внутренним ротором |
| 2.4.1. | Колесные гибриды |
| 2.4.2. | Электрические угловые модули (ЭБУ) |
| 2.4.3. | Множество моторов с колесами и рядом с ними: очень мало побед в производстве |
| 2.4.4. | SIM Привод в колесной тяге |
| 2.4.5. | В колесных двигателях самолетов |
| 2.4.6. | Перейти на высокое напряжение |
| 2.4.7. | Экологические проблемы |
| 2.4.8. | Много опций и много потребностей |
| 2.4.9. | Отсутствие стандартов |
| 2.5. | Лодочные электродвигатели |
| 2.5. | Относительные достоинства моторных позиций в электровелосипедах и электровелосипедах |
| 2.5. | Двигатель Chorus Meshcon 60/15 кВт |
| 2.5.1. | Regen Nautic Inc США |
| 2.6. | Колесный двигатель Protean для дорожной техники |
| 2.6. | Выдержки из некоторых спецификаций тяговых двигателей Azure Dynamics |
| 2.7. | Выдержки из некоторых спецификаций тяговых двигателей ABB в английских единицах измерения |
| 2.7. | Инновационный электродвигатель электрического велосипеда |
| 2.8. | Мотоцикл со смещенным от центра двигателем около ступицы |
| 2.9. | Применение в колесах Mitsubishi |
| 2.10. | Конструкция колесного двигателя |
| 2.11. | Колесный мотор Mitsubishi |
| 2.12. | Электромобиль Lohner-Porsche 1898 г. |
| 2.13. | Volvo ReCharge концептуальный гибрид |
| 2.14. | Колесный двигатель Фраунгофера на Artega GT |
| 2.15. | Противоминная защита от засад — вездеход MATV |
| 2.16. | Структура MATV |
| 2.17. | Осевой поток Elaphe, синхронные тяговые двигатели с постоянными магнитами необычайно высокой удельной мощности и отношения крутящего момента к массе |
| 2.18. | СИМ Привод колесной тяги |
| 2.19. | Дуплексный двигатель EMRAX 222 |
| 2.20. | Номинальный запас энергии тягового аккумуляторного блока в сравнении с напряжением аккумуляторного блока для мягких гибридов красным цветом, подключенных гибридов синим и чисто электрических автомобилей зеленым |
| 2.21. | Подруливающее устройство для личной подводной лодки Deepflight |
| 2.22. | Силовые установки пловца АНПА |
| 2.23. | Новый бесщеточный морской тяговый двигатель с постоянными магнитами Intermotor |
| 2.24. | Чистый электрический подвесной мотор Brothers Willisits |
| 2.25. | EMotor Чистый электрический подвесной мотор мощностью 75 кВт с синхронным двигателем на постоянных магнитах, асинхронный опционально. Открытый двигатель показан слева. |
| 2.26. | CERV |
| 2.27. | Интеграция двигателя CERV |
| 2.28. | Лодочные электродвигатели малого хода |
| 2.29. | Torqeedo усовершенствованная конструкция небольшого подвесного электрического мотора |
| 2.30. | Электрический подвесной мотор Aquawatt |
| 2.31. | Электрический подвесной мотор Aquawatt в действии |
| 2.32. | Подвесной двигатель мощностью 180 л.с., разработанный для Campion Marine of Canada |
| 2.33. | Продажи лодочных моторов в единице и стоимости в Европейском Союзе, США и других странах мира, а также торговые потоки |
| 2.34. | Гибридная трансмиссия ReGen Nautic |
| 3. | АНАЛИЗ 129 ПРОИЗВОДИТЕЛЕЙ ТЯГОВЫХ ДВИГАТЕЛЕЙ |
| 3.1. | Сотрудничество |
| 3.1. | 129 производителей тяговых двигателей транспортных средств по названию, стране, асинхронным / синхронным, целевым типам транспортных средств, заявлениям и изображениям |
| 3.1.1. | Визедо: Axco Motors: Semikron: WIMA: Хельсинкский университет прикладных наук Метрополия: Power Conversion B.V |
| 3.2. | Номера поставщиков указаны по континентам |
| 3.3. | Номера поставщиков по странам |
| 3.4. | Целевые приложения и разделение рынка. |
| 3.5. | Поставщики тяговых двигателей для транспортных средств — разделены на количество, предлагающее асинхронные, синхронные и оба, где указано |
| 3.6. | Поставщики, предлагающие щеточные, бесщеточные и оба типа синхронных двигателей, где указаны |
| 3.7. | Примеры поставщиков тяговых двигателей для поездов |
| 4. | 212 ЭЛЕКТРОМОБИЛИ И ИХ ДВИГАТЕЛИ |
| 4.1. | 212 производителей электромобилей, примеры транспортных средств, используемые асинхронные или синхронные двигатели, сведения о двигателях, если они указаны, производитель двигателей и количество двигателей на транспортное средство. |
| 4.2. | Распределение рыночной стоимости в течение следующего десятилетия между различными категориями транспортных средств |
| 4.3. | Транспортные средства с асинхронной, синхронной или обоими опциями по категориям в количестве и процентном отношении к категории, перечисленные в порядке убывания асинхронного процента. |
| 4.4. | Анализ 212 моделей электромобилей по категориям |
| 4.5. | Доля старых и заброшенных моделей в исследовании, использующих асинхронные или синхронные двигатели |
| 4.6. | Количество обследованных транспортных средств, в которых упоминается использование синхронных двигателей постоянного тока, по типам транспортных средств |
| 4.7. | Прочие характеристики двигателя, заявленные производителями транспортных средств. |
| 4.8. | Количество отобранных автомобилей с одним, двумя, тремя или четырьмя тяговыми электродвигателями |
| 4.9. | Сводка предпочтений тягово-моторной техники для автомобилей. |
| 4.10. | Наиболее упоминаемые поставщики двигателей |
| 5. | ИНТЕРВЬЮ И НОВОЕ МНЕНИЕ О ТЕНДЕНЦИЯХ В МОТОРАХ |
| 5.1. | Асинхронный и синхронный |
| 5.1. | Босоногий мотор Мотор квадроцикла на месте |
| 5.2. | Осевой и радиальный поток |
| 5.3. | Кому удастся стать электромобилем |
| 5.4. | Расширение рынка |
| 6. | ПРОГНОЗЫ РЫНКА |
| 6.1. | Прогнозы тяговых электродвигателей номеров |
| 6.1. | Количество тяговых двигателей электромобилей в мире, 2012-2023 гг., Тыс. |
| 6.1. | Количество тяговых двигателей электромобилей в мире, 2012-2023 гг., Тыс. |
| 6.2. | Количество автомобилей (тыс.) 2012-2023 гг. |
| 6.2. | Рыночная стоимость автомобилей, млн. Долл. США, уплаченные производителем транспортных средств 2012-2023 гг. |
| 6.2. | Мировой рынок стоимости тяговых двигателей для транспортных средств |
| 6.3. | Определение и предыстория |
| 6.3. | Расположение двигателей, проданных в 2022 году в транспортных средствах, на которых они установлены, в миллионах двигателей и в процентах от всех двигателей с округлением всех цифр.Цифры красного цвета относятся к дорогостоящим двигателям, а цифры зеленого цвета относятся к недорогим двигателям mo |
| 6.3. | Количество тяговых двигателей в многомоторных транспортных средствах 2012-2023 гг. И процентная доля тяговых двигателей всех транспортных средств округлено |
| 6.4. | Доля электромобилей с более чем одним двигателем 2012-2023 гг. |
| 6.4. | Номера поставщиков указаны по континентам |
| 6.4. | Форма двигателей |
| 6.5. | Расположение двигателей |
| 6.5. | Номера поставщиков тяговых двигателей по странам |
| 6.5. | Количество электромобилей с более чем одним электродвигателем, 2012-2023 гг., В тысячах и процентная доля всех электромобилей, округленное значение |
| 6.6. | Среднее количество двигателей на многомоторное транспортное средство 2012-2023 гг. |
| 6.6. | Целевые приложения вверху по сравнению с разделением рыночной стоимости в 2012 году в центре и в 2022 году внизу |
| 6.6. | Уникальное крупное новое исследование |
| 6.7. | Поставщики тяговых двигателей для транспортных средств — количество поставщиков асинхронных, синхронных и тех и других, где указано |
| 6.7. | Доля электромобилей с одним двигателем 2012-2023 гг. |
| 6.8. | Количество электромобилей с одним электродвигателем, т. Е. Количество моторов у одномоторных транспортных средств в тысячах |
| 6.8. | Количество обследованных транспортных средств, в которых упоминалось использование щеточных синхронных двигателей постоянного тока, в разбивке по типам транспортных средств |
| 6.9. | Количество отобранных вагонов с одним, двумя, тремя или четырьмя тяговыми электродвигателями |
| 6.9. | Цена тягового двигателя (ов) для производителя транспортного средства в тыс. Долл. США за транспортное средство |
| 6.10. | Стоимость рынка автомобилей, млн. Долл. США, уплаченные производителем транспортных средств 2012-2023 гг. |
| 6.10. | Заводская цена электромобилей, в тысячах долларов США, проданных по всему миру, 2012-2023 гг., С разбивкой по отраслям, округленная |
| 6.11. | Заводская стоимость электромобилей, проданных во всем мире, в миллиардах долларов США, 2012-2023 гг., С разбивкой по отраслям, округленная |
| 6.11. | Сводка предпочтений тягово-моторной техники для автотранспортных средств |
| 6.12. | Преимущества против недостатков щеточных и бесколлекторных тяговых двигателей для современных транспортных средств |
| 6.13. | Наиболее вероятные победители и проигравшие в следующем десятилетии |
| 6.14. | Номера поставщиков указаны по континентам |
| 6.15. | Номера поставщиков тяговых двигателей в алфавитном порядке по странам. |
| 6.16. | Приложения, на которые нацелена наша выборка поставщиков двигателей по сравнению с разделением рынка, перечисленные в порядке размера рынка 2012 г. |
| 6,17. | Поставщики тяговых двигателей для транспортных средств — разделены на количество, предлагающее асинхронные, синхронные и оба, где указано |
| 6.18. | Поставщики, предлагающие щеточные, бесщеточные и оба типа синхронных двигателей, где указаны |
| 6.19. | Распределение образца ТС по сферам применения |
| 6.20. | Транспортные средства с асинхронной, синхронной или обоими опциями по категориям по количеству и процентной доле категории, перечисленные в порядке убывания асинхронности в процентном отношении |
| 6.21. | 212 моделей электромобилей, проанализированных с разбивкой по категориям на предмет% асинхронности, мощности и крутящего момента их тяговых электродвигателей, в которых наиболее часто встречается интенсивное или грубое использование.Номинальная мощность и тяговые характеристики увеличены. |
| 6,22. | Доля старых и заброшенных моделей в исследовании, использующих асинхронные или синхронные двигатели |
| 6.23. | Количество обследованных транспортных средств, в которых упоминалось использование щеточных синхронных двигателей постоянного тока, в разбивке по типам транспортных средств |
| 6.24. | Прочие характеристики двигателя, заявленные производителями транспортных средств |
| 6.25. | Количество отобранных автомобилей с одним, двумя, тремя или четырьмя тяговыми электродвигателями |
| 6.26. | Заводская цена электромобилей в тысячах долларов США, проданных во всем мире, 2012–2023 гг., С разбивкой по отраслям, округленная |
| 6,27. | Заводская стоимость электромобилей, в миллиардах долларов США, проданных во всем мире, 2012-2023 гг., С разбивкой по отраслям, округленная |
| 7. | КОНТРОЛЛЕРЫ / ИНВЕРТОРЫ ДВИГАТЕЛЯ |
| 7.1. | Оптимизация с использованием новых устройств и интеграции |
| 7.1. | Количество тяговых инверторов в электромобилях в мире, 2012-2023 гг., Тыс. |
| 7.1. | Типовые компоненты электронной трансмиссии |
| 7.2. | Постоянная разработка автомобильных инверторов Hitachi |
| 7.2. | Количество автомобилей (тыс.) 2012-2023 гг. |
| 7.2. | Прогнозы рынка |
| 7.3. | Мировой рынок стоимости тяговых приводов для транспортных средств |
| 7.3. | Число тяговых двигателей в многомоторных транспортных средствах 2012-2023 гг. И процентная доля тяговых двигателей всех транспортных средств округлено |
| 7.3. | Электронный блок управления Toyota Prius 2010 с ложе из микросхем IGBT |
| 7.4. | Количество тяговых преобразователей в электромобилях в мире, 2012-2023 гг., Тыс. |
| 7.4. | Доля электромобилей с более чем одним двигателем 2012-2023 гг. |
| 7.4. | Концерн в Европе |
| 7.5. | Количество электромобилей с более чем одним электродвигателем, 2012-2023 гг., В тысячах и процентная доля всех электромобилей, округленное значение |
| 7.5. | Рыночная стоимость инвертора, млн. Долл. США, уплаченная производителем автомобилей 2012-2023 гг. |
| 7.6. | Новый гибридный автобус MAN из Германии, демонстрирующий силовой инвертор и использование суперконденсатора (ультраконденсатора) вместо батареи, что предъявляет другие требования к силовой электронике. |
| 7.6. | Среднее количество двигателей на многомоторное транспортное средство 2012-2023 гг. |
| 7.7. | Доля электромобилей с одним двигателем 2012-2023 гг. |
| 7.7. | Пример современных автомобильных инверторов от Phoenix International, компании John Deere, представленной на выставке eCarTec, Германия, октябрь 2012 г. Большой блок внизу слева используется в гибридном электрическом городском автобусе MAN, в котором используются суперконденсаторы. |
| 7.8. | Количество электромобилей с одним электродвигателем, т. Е. Количество моторов у одномоторных транспортных средств в тысячах 2012-2023 гг. |
| 7.9. | Цена тягового преобразователя для производителя автомобилей в тыс. Долл. США за автомобиль 2012-2023 гг. |
| 7.10. | Рыночная стоимость тягового инвертора в млн. Долл. США, уплаченная производителем автомобиля 2012-2023 гг. |