Робот и автомат в чем разница
Начиная с конца 80-х годов прошлого века, инженеры стремятся максимально нивелировать разницу между автоматическими и механическими трансмиссиями.
Одним из результатов такой работы стало появление роботизированной «механики», которая на сегодняшний день присутствует в модельных линейках почти всех крупных автопроизводителей.
Какими же преимуществами и недостатками обладает такой «робот» в сравнении с классическим «автоматом»?
Недостатки и особенности робота
Начнем с конструктивных особенностей «робота», который по сути является механической коробкой передач, но без третьей педали. За выжим сцепления в такой КП отвечает электропривод (актуатор).
В отличие от автоматической коробки с гидротрансформатором, конструкция роботизированной «механики» значительно проще, поэтому и дешевле в производстве. Последнее преимущество сыграло главную роль в быстром появлении «роботов» на многих недорогих моделях.
Но как оказалось, производители немного поспешили с массовым запуском такой трансмиссии на рынок. Все дело в том, что большинство «роботов», особенно при активной езде, не обеспечивали плавного переключения передач, раздражая водителей рывками и задержками при смене ступеней, а также откатом при старте на подъеме. Кроме того, роботизированные КП не могли похвастаться высокой надежностью.
Роботизированная коробка передач с двойным сцеплением
Улучшить плавность «роботов» взялся концерн Volkswagen, внедрив на своих моделях в середине 2000-х годов преселективный «робот» с двумя сцеплениями (DSG). В таких трансмиссиях четные и нечетные передачи, расположены на отдельных валах, оснащенных индивидуальными сцеплениями.
Новый тип КП хоть и стал совсем недешевым в производстве, но избавился от медлительности первых «роботов» и даже смог обеспечить автомобилю динамику разгона лучше, чем у версий с обычной «механикой». В дальнейшем многие ведущие автопроизводители также начали переходить на подобные “автоматы”, заказывая их у ведущих производителей трансмиссий.
Впрочем, в некоторых случаях остались вопросы к надежности отдельных КП данного типа. Но в сравнении с прежним «роботом» плавность и скорость переключений выросла просто несравнимо.
В подтверждение этого превосходства отметим, что в настоящий момент большинство брендов уже отказались от применения «роботов» на базе классических механических КП и в ближайшем будущем такая трансмиссия может уйти в историю.
Помимо «скорострельности», современные роботизированные КП превосходят классические «автоматы» и по экономичности. «Роботы» вполне способны помогать двигателю расходовать топливо на уровне версий с «механикой».
Классический автомат
Казалось бы, будущее «гидротрансформаторных автоматов» предрешено, тем не менее, «старая гвардия» не спешит сдавать свои позиции.
Во-первых, развитие таких трансмиссий также не стоит на месте. Хотя у многих автолюбителей «классическая» АКП ассоциируется с морально устаревшими четырехступенчатыми «автоматами», которые не спешат переключать скорости и не особо заботятся об экономии топлива.
На самом деле такие коробки передач встречаются сейчас только на бюджетных моделях, да и то довольно редко. Подавляющая часть «автоматов» сегодня имеют минимум шесть скоростей и предлагают функцию ручной смены передач.
Более такого, производители активно увеличивают количество ступеней в таких КП, чтобы добиться лучшей экономичности. На автомобилях стоимостью выше среднего все чаще появляются восьми- и даже девятидиапазонные трансмиссии, а некоторые бренды, например Ford, уже завлекают клиентов «автоматами» на 10 (!) ступеней.
Большинство «роботов» не могут справиться с большим крутящим моментом мощных двигателей. Конечно, можно привести пример нескольких суперкаров с роботизированными КП, включая 1000-сильный Bugatti Veyron, но это скорее исключения, подтверждающие правило, тем более, что владельцы спортивных авто не особо беспокоятся о длительности ресурса таких КП.
Также роботизированными трансмиссиями не оснащаются полноценные внедорожники, потому что на сроке службе «роботов» негативно сказываются продолжительные пробуксовки на бездорожье и рывки из-за изменения сцепных свойств при контакте четырех колес с дорогой.
Автомат или робот
Разница между «классическим автоматом» и «роботизированной» механикой с каждым годом уменьшается. Если «роботы» сохранят темпы “самосовершенствования”, подтянув надежность и выносливость, то «гидротрансформаторам» придется серьезно потесниться.
Похожие записи
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Преселективная роботизированная коробка передач DSG в автомобилях Volkswagen
Специалисты компании Volkswagen создали новую, уникальную коробку переключения скоростей DSG (Direct Shift Gearbox), которая по своим техническим характеристикам намного превосходит существующие образцы.
В настоящее время преселективные роботизированные коробки передач DSG второго поколения устанавливаются на большинство моделей Volkswagen: Golf, Passat B8,Passat СС, Tiguan, Jetta.
Использование этой коробки передач позволяет почувствовать комфорт и удобство при переключении. Данная коробка сочетает в себе все современные технологии трансмиссий различных типов. Переключение скоростей осуществляется вручную, но за весь процесс отвечает электроника и различные автоматизированные механизмы.
Отличительной особенностью работы коробки является то, что во время переключения передач не изменяется поток мощности. Плавность работы такого агрегата по достоинству оценят как любители загородной быстрой езды, так и владельцы автомобилей, передвигающиеся преимущественно в городской черте.
Особенности работы коробки-робота
Коробка передач DSG может эксплуатироваться в двух режимах — спортивном и нормальном.
Спортивный режим. Данный режим предусматривает более длительное раскручивание при переходе на повышенные скорости и быстрый переход на пониженные передачи. Такой режим является предпочтительным при скоростной езде. Имеется функция Tiptronik, которая позволяет производить управление передачами в ручном режиме.
Всем, кто любит спортивный тип езды, можно использовать переключатели-лепестки, смонтированные на руле. Такие лепестки позволяют почувствовать мощь автомобиля и от души насладиться спортивной ездой.
Нормальный режим. Такой режим является привычным для всех автомобилистов и может использоваться при передвижении по городу или для небыстрого, экономного вождения.
Устройство DSG
6-ступенчатая коробка DSG имеет два, независимых друг от друга блока трансмиссий. Благодаря такой конструкции, происходит поочередное сцепление с двигателем, в зависимости от включенной в данный момент передачи. Для управления используется двойное сцепление, которое состоит из пары муфт, которые установлены в едином корпусе.
Одно сцепление отвечает за работу 1, 3, 5 передачи, второе за 2, 4, 6 передачу. Каждый блок оснащен отдельным приводным валом, передающий вращающее действие на колеса. Передача осуществляется с помощью дифференциала.
КПД роботизированных коробок передач
Применение схемы двойного сцепления в коробках DSG, при сравнении с АКП, имеющей гидротрансформатор, позволяет в значительной мере увеличить КПД. Интеллектуальная система коробки в сочетании с небольшой массой, позволяет значительно понизить расход топлива. Оценить все положительные качества данной коробки можно на автомобилях Passat CC, Golf GTI, Passat Variant.
Интеллектуальная система коробки в сочетании с небольшой массой, позволяет значительно понизить расход топлива. Оценить все положительные качества данной коробки можно на автомобилях Passat CC, Golf GTI, Passat Variant.
Интеллектуальный блок управления
Коробка снабжена встроенным блоком, который проводит анализ оборотов двигателя, скорости движения, нажим на педаль газа.
На основе полученных данных автоматически выбирается необходимая передача или момент перехода на другую передачу. Это обеспечивает плавность движения и снижает нагрузку на двигатель.
Как правильно управлять роботизированной коробкой передач
На современных автомобилях используется несколько видов коробок передач – механическая, автоматическая, вариаторная. Механическая коробка отличается своей надежностью, но требует от водителя навыков управления. Автоматическая же значительно проще в управлении, но более «капризна» в техническом плане. Недавно же конструкторы выпустили еще один тип КПП – роботизированная. В ней они постарались соединить воедино надежность «механики» с удобством «автомата». И это у них получилось – все больше автопроизводителей комплектуют свои авто роботизированной коробкой передач.
В ней они постарались соединить воедино надежность «механики» с удобством «автомата». И это у них получилось – все больше автопроизводителей комплектуют свои авто роботизированной коробкой передач.
Немного об устройстве
Суть такой коробки достаточно проста – имеется механическая КПП и электронный блок ее управления. У РКПП все функции, которые должен был выполнять водитель с механической коробкой (выжим сцепления, перевод рычага коробки в нужное положение) выполняется актуаторами – сервоприводами электронного блока.
Благодаря этому надежность КПП возросла за счет использования классической «механики» и возросло удобство ее пользования. Водителю всего лишь необходимо переводить селектор в нужное положение (как в автоматической КПП) и наслаждаться ездой, а электронный блок позаботится о том, чтобы выполнялось переключение передач.
Устройство роботизированной коробки передачПри всем этом многие роботизированные коробки оснащаются еще и ручным управлением, что позволяет управлять водителю коробкой самостоятельно, с единственным отличием – нет необходимости выжимать сцепление.
Особенности управления
Некоторые режимы работы РКПП получила от автоматической коробки, а именно:
- «N» — нейтраль. Режим, при котором крутящий момент на колеса от КПП не передается. То есть двигатель работает, на коробку передается вращение, но из-за положения шестерен на колеса оно не передается. Используется при длительной стоянке авто, перед началом движения, после остановки;
- «R» — движение задним ходом. Здесь все просто, водитель переводит селектор в это положение и авто движется назад.
Другие же режимы роботизированной коробки имеют свое обозначение:
- «А/М» или «Е/М» — движение вперед. Этот режим соответствует режиму «D» автоматической коробки, то есть автомобиль движется вперед, а КПП производит переключение передач. В режиме «М» выполняется ручное управление. Переводом селектора в определенный паз выбирается необходимый режим;
- «+», «-» — переключатель передач. Кратковременные переводы селектора в сторону «+» или «-» обеспечивают переключение передачи при ручном режиме управления «М».


Требуется ли прогрев коробки?
Вроде все просто, и ничего сложного в управлении такой коробки нет – достаточно перевести селектор в нужное положение, и начать движение. И все же следует знать, как управлять коробкой робот, чтобы она работала без проблем.
Начнем с интересного вопроса – нужно ли прогревать КПП перед началом движения зимой? Для автоматической коробки в зимний период прогрев обязателен и выполняется он кратковременным переводом селектора во все положения.
Роботизированная коробка, по сути, механическая и не требует прогрева. И все же зимой перед началом движения прогреть РКПП следует, хотя это не совсем прогрев. Во время стоянки масло в коробке стекает вниз и из-за мороза загустевает. Поэтому рекомендуется зимой после запуска мотора дать время, чтобы масло скорее не прогрелось, а просто растеклось по элементам коробки, снижая между ними трение. Достаточно просто постоять пару минут с заведенным мотором, при этом селектор переводить в разные режимы не нужно, достаточно держать его в положении «N». После этого движение нужно начинать плавно, без резких рывков и проехать так хотя бы 1 км, что обеспечит полный прогрев масла.
После этого движение нужно начинать плавно, без резких рывков и проехать так хотя бы 1 км, что обеспечит полный прогрев масла.
Начало движения на подъем, его преодоление, спуск
Многие автомобили с РКПП не оборудованы системой помощи старта на подъем, поэтому правильно начинать движение нужно научиться самому водителю. При старте на подъем с роботизированной коробкой необходимо поступать, как и с «механикой». Для начала движения селектор переводится в режим «А», плавно нажимается акселератор и одновременно авто снимается с ручника. Такое действие исключит откат авто назад. Одновременно жать на газ и снимать с ручника следует потренироваться, чтобы водитель чувствовал двигатель и понимал, когда сцепление начало включаться и можно снимать с ручника.
При начале движения на подъем в зимний период лучше использовать ручной режим, при этом устанавливать первую передачу. Сильно газовать не стоит, чтобы не было пробуксовки колес.
При движении на подъем при выбранном автоматическом режиме коробка самостоятельно начнет переходить на пониженные передачи, что является вполне логичным, ведь при повышенных оборотах преодолеть подъем легче. Такая КПП оснащена гироскопом, который определяет положение автомобиля, и если датчик показывает подъем, то коробка буде работать соответственно. Можно совершать движение и в ручном режиме, зафиксировав определенную передачу. Важно понимать, что РКПП не даст двигаться в натяг, поэтому при подъеме обороты двигателя должны быть не меньше 2500 об/мин.
Такая КПП оснащена гироскопом, который определяет положение автомобиля, и если датчик показывает подъем, то коробка буде работать соответственно. Можно совершать движение и в ручном режиме, зафиксировав определенную передачу. Важно понимать, что РКПП не даст двигаться в натяг, поэтому при подъеме обороты двигателя должны быть не меньше 2500 об/мин.
При спуске же никаких действий от водителя не требуется. Достаточно перевести селектор в положение «А», и снять ручник. При этом авто будет производить торможение мотором.
Остановка, парковка
И третий немаловажный вопрос – правильность парковки и остановки. После полной остановки авто, селектор необходимо перевести в нейтраль «N», поставить на ручник и после заглушить двигатель. При кратковременных остановках перевод селектора в нейтраль необязателен, вполне можно оставаться и на режиме «А». Но стоит учитывать, что при остановке сцепление остается выжатым. Поэтому в пробке или на светофорах, когда остановка затягивается по времени, все же следует переходить на нейтраль.
Другие режимы
Это основные правила, как управлять роботизированной коробкой. Но есть и другие особенности, к примеру, некоторые РКПП имеют дополненные режимы – спорт и зимний, так называемая «снежинка».
«Снежинка» направлена на то, чтобы как можно плавнее и без пробуксовок начать движение на обледенелой дороге. Все что она делает, это обеспечивает начало движения сразу со второй передачи и более плавные переходы на повышенные передачи.
Режим «спорт» производит переход на повышенные передачи при больших оборотах, чем в обычном режиме. Это позволяет быстрее ускоряться. То есть, если при обычном режиме переход на 2 передачу выполнялся, к примеру, при 2500 об/мин, то в режиме «спорт» этот переход будет осуществляться при 3000 об/мин.
Теперь о возможности перехода из автоматического режима в ручной и обратно во время движения. Роботизированная коробка без проблем позволяет это делать. Также позволяется самостоятельно понижать или повышать передачу для изменения скорости движения. Но стоит учитывать, что полностью управление коробкой электронный блок не передаст, он будет постоянно контролировать работу.
Но стоит учитывать, что полностью управление коробкой электронный блок не передаст, он будет постоянно контролировать работу.
Поэтому если водителю вздумается перейти, к примеру, на две передачи вниз, то электронный блок сделать это даст, но при этом проконтролирует обороты двигателя и если они не будут соответствовать выбранной передачи, электроника самостоятельно выполнит переход на допустимую передачу – сработает так называемая «защита от дурака».
Здесь все просто – электронный блок запрограммирован так, что каждой передаче соответствует определенный диапазон оборотов двигателя. И если выбранная вручную передача соответствует своему диапазону, то коробка выполнит переключение, а если нет – включит необходимую скорость.
Полезные советы
Напоследок некоторые рекомендации по эксплуатации и обслуживанию роботизированной коробки.
Такая коробка «не терпит» резких нажатий на педаль газа, поэтому лучше осуществлять движение в спокойном режиме. Даже при необходимости ускориться — лучше жать на акселератор плавно, при этом стоит перейти в ручной режим. А при торможении следует наоборот – переходить в автоматический режим.
А при торможении следует наоборот – переходить в автоматический режим.
Особенностью РКПП является наличие небольших толчков при переключении передач. От них можно избавиться достаточно просто – при переключении передач сбрасывать обороты двигателя, то есть действовать по аналогии с обычной механической коробкой.
Наличие ручного режима позволяет даже выполнять выезд «враскачку» в случае, если авто застряло в сугробе. Но при этом на пользу КПП это не пойдет, так как буксовать на РКПП не рекомендуется, это может привести к декалибровке исполнительных механизмов. Поэтому застрявшее авто все же лучше извлекать с привлечением сторонней помощи.
Обязательно при каждом ТО делать инициализацию и проводить диагностику состояния РКПП, что позволит устранить все неисправности коробки еще на раннем этапе.
Есть и другие мелкие особенности таких коробок, которые зависят от изготовителя. Ими лучше сразу поинтересоваться, чтобы в дальнейшем не возникло недоразумений с эксплуатацией роботизированной коробки.
DSG – немецкий «робот» для автомобиля
Аббревиатура DSG по-немецки (Direkt Schalt Getriebe) и по-английски (Direct Shift Gearbox) означает одно и то же: «коробка передач прямого переключения». Впервые разработкой такой КПП занимался француз по имени Адольф Кегресс, сотрудничая с компанией Citroen в 30-е годы ХХ века. Именно ему приписывают идею о создании агрегата с гидромеханическим управлением и двумя сцеплениями. Но конструкцию посчитали сложной, и она не получила широкого распространения. Ее плюсы были оценены уже гораздо позже, когда за дело взялись немецкие инженеры. Попытки создания подобной коробки предпринимали в Porsche, но «настоящая» DSG увидела свет в недрах конструкторского бюро Volkswagen Group.
Первая «серийная» коробка передач DSG была установлена на Volkswagen Golf R32 в 2002 году – а к настоящему времени число проданных автомобилей Volkswagen, Audi, SEAT и Skoda, оснащённых DSG, уже перевалило за 10 000 000. Сегодня автолюбители хорошо знают, что такое DSG, и сколько возможностей она открывает для водителя.
Основные особенности
Главная особенность DSG заключается в том, что она помогает переключить скорости и одновременно сохранить мощность в процессе движения. По сравнению с другими роботизированными коробками передач, у DSG есть такие качества, как экономия топлива и отличная динамика во время набора скорости.
DSG состоит из коробки передач и двух сцеплений. Эта простая система позволяет быстро переключать передачи, а автомобиль за счет этого разгоняется за считанные мгновения.
Как обычно работает механическая коробка? Пока происходит переключение скоростей, теряется динамика. Коробка DSG сводит эту проблему к минимуму, ведь в ней одно сцепление относится к нечетным рядам, а второе – к четным. Пока машина разгоняется, набирая первую скорость, диск на четном ряду сразу включается, и перерывов в разгоне нет.
Плюсы DSG
- Подобный режим переключения скоростей позволяет уменьшить расход бензина. Установлено, что автомобили с DSG потребляют на 10% меньше топлива, чем средства передвижения с обычной коробкой передач.
- Динамичное ускорение – еще один важный плюс. Передачи переключаются всего за 8 миллисекунд! Никакого эффекта «резиновой» тяги, который часто встречается в автоматических коробках передач, здесь нет.
- Если захочется, всегда можно переключать передачи вручную, установив мануальный режим. Так что DSG – это еще и универсальная система.
- DSG на 20 процентов легче, чем гидромеханическая трансмиссия.
- Показатель надежности у DSG в несколько раз лучше «механики»: средний срок службы составляет 300 тысяч километров. Трансмиссионную жидкость в моделях DSG 6 необходимо менять через каждые 100 тысяч километров пробега, то есть не слишком часто. А, например, DSG 7 вообще не требует никаких вмешательств в течение всего периода эксплуатации.

Что важно знать о DSG?
- Для идеальной работы DSG нужно заправлять автомобиль только качественным топливом, иначе дешевый бензин существенно сократит срок службы коробки передач.
- Дрифтовать на автомобиле с DSG не рекомендуется – система может попросту сломаться.
- Как и у всякой коробки передач, у DSG тоже есть слабое место. Так, это сцепление нечетных передач, потому что на него осуществляется максимальная нагрузка, когда машина начинает двигаться. Эта проблема знакома жителям мегаполисов, которые часто стоят в пробках. В этом случае автомобиль переводится на холостой ход с первой скоростью. Водитель придерживает и периодически отпускает педаль газа, а потом снова притормаживает. Сцепление при этом почти активировано, и в результате этого происходит постоянное трение. Происходит перегрев сцепления, и таким образом оно может быстрее износиться.
Кому вообще стоит покупать автомобиль с DSG? Прежде всего, тем, кто хочет сэкономить на горючем – оно не будет расходоваться впустую. Автомобиль с такой коробкой передач отлично зарекомендовал себя как на горных серпантинах, так и на скоростных трассах в городе. Если для населенного пункта не характерны пробки, то здесь и думать нечего – стоит брать!
Также важно заметить, что постоянного переключения четных и нечетных передач DSG не «любит», так же, как и медленной езды. В остальном же эта система будет работать без проблем, к удовольствию водителя.
В остальном же эта система будет работать без проблем, к удовольствию водителя.
Роботизированная коробка передач автомобиля — устройство и как работает
Роботизированная коробка передач автомобиля — разновидность полуавтоматических КПП, которая объединяет черты механической коробки и автоматической. Расскажем что такое коробка — робот, как работает и в чем преимущество перед другими типами трансмиссии.
Что это такое
Вместо третьей педали, которую нужно выжать для переключения скоростей с механической коробкой передач, в авто с роботизированной коробкой передач две педали. Роль третьей педали играет целая система сенсоров, передатчиков и исполнительных механизмов, которые при помощи бортового компьютера переключают коробку без участия водителя и сцепления. Компьютер синхронизирует работу деталей коробки, а некоторые электронные системы способны научиться распознавать стиль вождения водителя и предугадывать его действия. У роботизированной КПП ручка переключения скоростей находится там же, где и ручка механической коробки, но вместо Ж-образного переключения, ручка переключается только вперед или назад.
Как работает
Работает следующим образом. При переключении ручки передач и нажатии педали газа сенсоры передают информацию в блок управления, который в свою очередь передает сигнал в коробку передач. Сенсоры коробки передач также сообщают в блок информацию о действующей скорости и новом требовании переключения скоростей.Блок управления синхронизирует информацию, полученную от сенсоров, и выбирает оптимальную скорость и время переключения скоростей и обеспечивает слаженность работы механизмов коробки передач. При этом принимается в расчет скорость вращения двигателя, работа кондиционера, показатели спидометра.
Бортовой компьютер роботизированной КПП управляет гидромеханикой, который смыкает или размыкает сцепление. Этот процесс происходит синхронно с действием водителя, переключающего ручку скоростей. Гидромеханический блок использует жидкость из тормозной системы для запуска гидравлического цилиндра, обеспечивающего движение актуатора.В чём преимущество
Электроника реагирует быстрее человека и более точно, поэтому «выжать» сцепление можно без участия водителя. Для парковки автомобиля, обратного хода или нейтрального положения трансмиссии водитель должен предварительно выжать обе педали одновременно, после этого можно выбрать один из трех вариантов.
Для парковки автомобиля, обратного хода или нейтрального положения трансмиссии водитель должен предварительно выжать обе педали одновременно, после этого можно выбрать один из трех вариантов.Сцепление нужно только, чтобы машина пришла в движение. Для быстрого переключения скорости на более высокую необходимо убрать ногу с педали газа, чтобы двигатель сбавил обороты для подходящей скорости. Для этого ручка передачи скоростей должна стоять на нужной позиции.
Что такое коробка передач робот, в чем разница с автоматом и вариатором
Рядовому автолюбителю достаточно сложно уследить за изменениями конструкции автомобилей, особенно в тех случаях, когда они касаются таких сложных и дорогостоящих агрегатов, как коробка передач.
Что значит коробка «робот» в машине?
Чем отличается робот от автомата и вариатора?
Какая коробка надёжней – автомат или робот?
Для того, чтобы разобраться с этими и другими вопросами, прежде всего, нужно знать, как работает коробка передач робот – хотя бы в общих чертах, не вдаваясь в детали.
Содержание статьи
Коробка автомат и робот — в чём разница
Принцип работы коробки робот
Схема работы коробки передач робот (РКПП)
Роботизированная КПП работает как и механическая, но включение-выключение передач и сцепления осуществляется при помощи сервоприводов, приводимых в действие актуаторами.
Прежде, чем сравнивать различия в принципе работы коробки робот от автомата, правильнее будет описать работу традиционной «механики» – так легче понять принципиальную разницу работы механизмов.
В случае с «механикой» все действия, связанные с изменением передаточного числа трансмиссии, осуществляются водителем. То есть Вы сначала выключаете муфту сцепления – тем самым разъединяете двигатель и трансмиссию.
Далее нужно включить требуемую передачу и включить сцепление, для того, чтобы крутящий момент (значение которого зависит от выбраннои передачи, или ступени) от двигателя передался через КПП к колёсным приводам.
Роботизированная коробка передач работает сходным образом, но включение передач и включение-выключение сцепления осуществляется при помощи сервоприводов, приводимых в действие актуаторами. Актуаторы могут быть как электрическими, так и гидравлическими, электропневматическими и пр.
Электрический актуатор – это одноходовой электрический двигатель и его работа полностью идентична работе электрического дверного замка (конечно же, автомобильного). Гидравлический и пневматический актуаторы работают сходным образом, но приводятся в действие маслом или воздухом.
Управление сервоприводами осуществляет электронный блок управления, считывая и обрабатывая информацию, поступающую от различных датчиков – АБС, выключателя стоп-сигнала, датчика положения дроссельной заслонки и т.п.
Коробка передач робот (РКПП) в разрезе
Как видите, робот – это, в принципе, та же «механика», но управляемая уже не вручную. Муфта сцепления и валы КПП устроены так же, как и на обычной коробке.

РКПП – это, в принципе, та же «механика», но управляемая уже не вручную. Муфта сцепления и валы КПП устроены так же, как и на механической коробке.
Исключение составляют так называемые преселекторные КПП – они имеют две муфты сцепления и два первичных вала, которые вставлены один внутри другого. Такое усложнение конструкции вызвано медленной работой исполнительных механизмов, в результате которой во время разгона автомобиля был заметный провал, так как актуаторы не могут работать с достаточной скоростью, и в момент смены ступеней (передач) муфта сцепления остаётся разъединённой – дольше, чем при ручном включении-выключении.
Двойное сцепление и двойной первичный вал в преселекторных роботизированных КПП работают согласованно. Например, во время разгона блок управления, как бы прогнозируя дальнейший разгон, включает повышенную передачу на одном из валов, но муфта сцепления ещё разъединена – крутящий момент передаётся другой парой муфта-вал. В нужный момент включается вторая муфта, и усилие передаётся через другой вал – со включенной заранее повышенной передачей.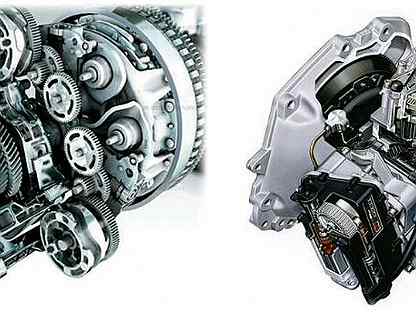
То есть, преселекторная КПП – это практически две коробки, вставленные одна в другую, что, конечно же, сказывается на стоимости подобных агрегатов – устанавливаются они только на дорогих суперкарах. Время переключения передач в такой КПП, по сравнению с обычным роботом, сокращено примерно в 20 раз.
Чем же отличается робот от автомата
Автоматическая коробка передач (АКПП) в разрезе
В «классической» гидротрансформаторной АКПП иной даже способ передачи крутящего момента. Он осуществляется не за счёт силы трения, возникающей между ведущим и ведомым дисками сцепления, а за счёт передачи кинетической энергии насосного колеса гидротрансформатора, жёстко закрепленного на маховике, турбинному колесу, соединённому с валом АКПП. Проще говоря, лопасти насосного колеса толкают (закручивают) масло (ATF), которое, в свою очередь, приводит во вращение турбинное колесо.
Автоматическая КПП принципиально отличается от РКПП конструктивными особенностями и способом передачи крутящего момента.

Это, конечно же, упрощенная схема работы АКПП – в конструкции гидротрансформатора есть ещё такая деталь, как реактор – именно он превращает гидромуфту в гидротрансформатор, то есть в узел, который не просто передаёт крутящий момент, но, при необходимости, и меняет его значение. Например, при разгоне реактор обеспечивает увеличение крутящего момента, «подталкивая» турбинное колесо.
Иную конструкцию имеют и валы АКПП – их шестерни уже имеют иной – планетарный – тип зацепления, а муфта сцепления, как таковая, вообще отсутствует – её заменяют пакеты фрикционов.
По сравнению с роботом, АКПП имеет большее быстродействие и плавность хода при разгоне, так как исполнительные механизмы приводятся в действие тем же маслом, которым смазываются детали агрегата, и срабатывают практически мгновенно – при условии, что АКПП прогрета.
Коробка-робот — отзывы
В силу своей конструкции коробка-робот имеет свои плюсы и минусы. Многие автовладельцы отмечают, что коробка робот плоха тем, что не имеет той плавности хода, которая характерна для гидротрансформаторной коробки. Преселективные же роботы, хоть и лишены этого недостатка, имеют довольно, если можно так сказать, «неуклюжую» конструкцию – уж слишком дорогой ценой в них достигается быстродействие.
Многие автовладельцы отмечают, что коробка робот плоха тем, что не имеет той плавности хода, которая характерна для гидротрансформаторной коробки. Преселективные же роботы, хоть и лишены этого недостатка, имеют довольно, если можно так сказать, «неуклюжую» конструкцию – уж слишком дорогой ценой в них достигается быстродействие.
Роботизированные коробки передач, в отличии от автоматических КПП, переключают быстрее и плюс они более экономны.
Но робот обладает и несомненными достоинствами – в силу того, что это лишь видоизменённая «механика», ремонт коробки-робота достаточно легко осуществить в условиях обычного автосервиса.
В гидротрансформаторной АКПП, несмотря на то, что она кажется более простой, решающее значение имеет точность изготовления деталей. В результате этого многие её неисправности очень сложно диагностировать – малейшая потеря давления масла может послужить причиной сбоев в работе трансмиссии. Иногда даже замена масла и масляного фильтра может иметь неблагоприятные последствия – авто начинает дёргаться, иногда даже при равномерном движении.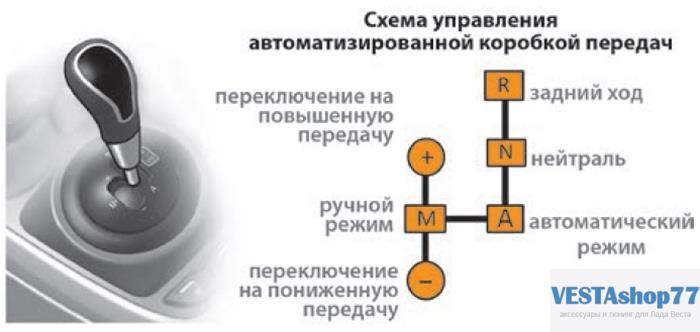
Но в целом всё же, если проанализировать отзывы владельцев, то на вопрос – «что лучше – автомат или робот?» можно сказать, что автомат всё-таки лучше. Может быть, развитие технологий и изменит эту ситуацию – ведь ещё не так давно осуществить выпуск роботизированных коробок передач было невозможно именно из-за того, что технологии недавнего прошлого не позволяли наладить выпуск сервоприводов, обладающих приемлемыми компактностью и быстродействием.
Вариатор, строго говоря, не является коробкой выбора передач – изменение величины крутящего момента осуществляется бесступенчато, поэтому вариаторная трансмиссия требует отдельного изучения.
Как управлять коробкой робот
Управление автомобилем с коробкой робот принципиально не отличается от управления машиной с АКПП. Для наглядности можете сравнить рычаги (селекторы) той и другой коробки, изучив фото:
Рычаги управления (селекторы) коробками передач
Отличий в правилах буксировки машин с РКПП нет – достаточно лишь избегать резких нажатий на педаль «газа» и динамичных разгонов – во избежание рывков трансмиссии.

Как видно из фотографии, выбор передач на роботе можно осуществлять вручную – достаточно лишь на краткое время переместить селектор в положение, соответствующее повышенной («+») или пониженной (« – «) передаче. Блок управления контролирует работу КПП и в режиме ручного управления, поэтому излишний «перескок» при выборе передачи исключается.
Некоторых автолюбителей интересует, можно ли возить прицеп на авто с коробкой робот, а также – можно ли буксировать машину с коробкой-роботом. Отличий в правилах буксировки для таких авто нет – достаточно лишь избегать резких нажатий на педаль «газа» и динамичных разгонов – во избежание рывков трансмиссии.
В остальном же, если Вы купите машину с РКПП, особенных вопросов, как пользоваться коробкой робот, у Вас не возникнет – современные авто сделаны для пользователей, а не для профессионалов, поэтому управление ими, как правило, интуитивно понятно.
Скорее всего, вопросы о том, как правильно пользоваться коробкой робот, связаны с привыканием к новой машине – ведь даже два автомобиля, сошедшие с конвейера один за другим, немного отличаются друг от друга.
что это такое? Плюсы и минусы
В мире существует несколько автомобильных трансмиссий. Наиболее популярными являются механическая коробка передач и автомат. На данный момент многие популярные производители стали использовать в своих новинках роботизированный вариант. В статье рассмотрим, что это такое — коробка передач робот, какие она получает отзывы и имеет ли преимущества и недостатки.
Характеристика коробки
Коробка передач робот является, по сути, механической, просто в нее дополнительно встроено автоматическое сцепление и переключение передач. Соответственно, работа трансмиссии полностью зависит не от водителя, как в других вариантах, а от электронного управляемого блока. Водителю лишь остается правильно передавать входящую информацию для корректной работы трансмиссии.
Устройство
Какая коробка передач лучше, автомат или робот, мы рассмотрим чуть позже, для начала нам нужно узнать устройство нового изобретения. Автоматизированная коробка передач получила сцепление фрикционного типа. Таковым является пакет дисков,ъ либо же встроенный отдельный механизм. Наиболее надежной и долговечной можно назвать конструкцию, которая получила двойное сцепление. Volkswagen Golf стал первым в мире автомобилем, который был оснащен роботизированной коробкой передач. Отзывы о работе устройства были довольно хорошими, все отмечали неплохую реакцию со стороны электроники, а также идеальную функциональность при разгоне. При этом поток мощности не разрывался. Это достигается при помощи использования двойного сцепления. При этом переключение скоростей занимает не более 1 секунды. При работе на российских дорогах, к сожалению, срок эксплуатации подобной коробки передач сокращается как минимум вдвое.
Автоматизированная коробка передач получила сцепление фрикционного типа. Таковым является пакет дисков,ъ либо же встроенный отдельный механизм. Наиболее надежной и долговечной можно назвать конструкцию, которая получила двойное сцепление. Volkswagen Golf стал первым в мире автомобилем, который был оснащен роботизированной коробкой передач. Отзывы о работе устройства были довольно хорошими, все отмечали неплохую реакцию со стороны электроники, а также идеальную функциональность при разгоне. При этом поток мощности не разрывался. Это достигается при помощи использования двойного сцепления. При этом переключение скоростей занимает не более 1 секунды. При работе на российских дорогах, к сожалению, срок эксплуатации подобной коробки передач сокращается как минимум вдвое.
Особенности
Привод сцепления может быть электрическим, гидравлическим. В первом случае следует отметить наличие электродвигателя и механической передачи. Второй же тип привода работает за счет функционирования специальных цилиндров, которые управляются клапаном электромагнитного типа. В некоторых случаях коробка передач робот, вариатор которой хорошо устроен, комплектуется с электродвигателем. Он перемещает цилиндры, а также рассчитан на поддержание работы гидромеханического блока. Подобный прибор, который имеет привод такого типа, отличается длительностью скорости переключения передач. Как правило, она варьируется в пределах от 0,3 до 0,5 секунды. Однако если сравнивать с гидравлическими аналогами, то в системе не будет нужно постоянно поддерживать определенный давление. Ярким примером подобного автомобиля является «Опель», коробка передач робот на этой машине в целом радует многих водителей.
Гидравлические коробки передач получили быстрый цикл, который обеспечивает переключение передач за время от 0,05 до 0,06 секунды. Именно поэтому чаще всего такая трансмиссия применяется на гоночных машинах и суперкарах. Примерами служат Ferrari и Lamborghini. На машинах, которые относятся к бюджетному классу, такую коробку передач нельзя поставить на СТО даже в качестве дополнительной опции.
Как работает КПП робот?
Большая часть механизмов регулируется специальными интеллектуальными блоками коробки передач робот. Что это такое? Благодаря этому, то есть работе электронной системы, можно отслеживать все необходимые параметры для коробки передач. Также датчики анализируют положение трансмиссии, давление масла и других параметров для передачи в основной блок. После этого электроника сформирует все необходимые действия, которые следует выполнить. В виде коротких сигналов они будут поступать на электропривод и электроклапаны, соответственно, это позволит быстро, но плавно переключать коробку передач.
Режимы работы
Конструкция вариатора автомата и коробка передач робот для многих остается непонятной. Данное устройство работает на принципах механики. Однако при желании пользователя его можно переключать на автоматизацию. После того как человек перейдет в соответствующий режим, электронный блок будет заблокирован. Последний сам станет анализировать алгоритм работы. Водителю нужно лишь нажимать на педаль газа и следить за тем, что происходит на дороге. Довольно часто в пробках, судя по отзывам, коробка передач робот становится незаменимой. Если режим ручной, то водителю будет позволено самостоятельно переключать передачи с пониженной на повышенную, и наоборот. Управление можно осуществлять при помощи обычного рычага коробки передач.
Водителю нужно лишь нажимать на педаль газа и следить за тем, что происходит на дороге. Довольно часто в пробках, судя по отзывам, коробка передач робот становится незаменимой. Если режим ручной, то водителю будет позволено самостоятельно переключать передачи с пониженной на повышенную, и наоборот. Управление можно осуществлять при помощи обычного рычага коробки передач.
Актуальность коробки в России
К сожалению, отечественные производители практически не используют для создания автомобилей коробку передач робот. Что это такое, не знают многие водители. Однако 2015 году было заявлено, что автомобили от ВАЗ, которые относятся к серии Priora, будут оснащаться роботом. Такая коробка весит около 35 кг, причем она полностью адаптирована под российские дороги и погодные условия. Например, если старая коробка автомат не давала возможности запустить машину при температуре ниже 25 градусов, то робот может показывать хорошую работу, даже если эта отметка опустится до -40. Гарантийный срок на роботизированную коробку составляет 3 года, однако производитель заявил, что средний период эксплуатации — 10 лет. Именно таким образом компания хотела добиться возвращения популярности для машин серии Priora.
Гарантийный срок на роботизированную коробку составляет 3 года, однако производитель заявил, что средний период эксплуатации — 10 лет. Именно таким образом компания хотела добиться возвращения популярности для машин серии Priora.
Преимущества
Отзывы коробка передач робот заслужила весьма хорошие. Рассмотрим ее основные преимущества. Многие заявляют, что это удобно, когда коробка передач имеет все плюсы автомата и механики. Соответственно, человек, работая с машиной, может получать впечатления от действия автоматической коробки передач. Но одновременно с этим ему не стоит беспокоиться, что будет потрачено слишком много топлива.
Главное преимущество такой коробки передач — экономичность. Как заявляют пользователи, конструкция получила программное обеспечение, которое рационально определяет крутящий момент. И если сравнивать с обычным человеком, электроника не нервничает, не устает, не впадает в депрессию, не влияет на нее физическая нагрузка. Именно поэтому на мировом рынке роботизированная коробка передач получила огромное распространение.
На данный момент такая трансмиссия комплектуется в автомобилях классов A, B, C. Следует отметить, что «Тойота Королла» коробку передач робот тоже получила. Еще данное устройство устанавливается на немецкой машине Volkswagen Amarok. Причем этого «немца» можно купить в такой комплектации как на российском, так и на европейском рынке.
Однако это не исчерпывающий список плюсов, имеется еще несколько. Судя по отзывам, данная трансмиссия высоконадежная. Замена механизмов потребуется только после совершения пробега в 250 тыс. км. Зачастую ремонту подлежит сцепление, которое не очень хорошо переносит тяжелые нагрузки, особенно если идет речь о езде на труднопроходимых участках. Стоимость роботизированной коробки намного меньше, чем стандартного автомата. Более того, очень неприхотлива в обслуживании коробка передач робот. Масло — это единственное, что обязательно необходимо менять через каждые 60 тыс. км пробега.
Особенности веса
Вес коробки — довольно важный вопрос. По данному параметру трансмиссия показывает себя лучше, чем автомат, так как она значительно легче. Снаряженная масса такой коробки для легковых автомобилей будет не более 50 кг, в то время как вес автомата только начинается с этой отметки и достигает 100 кг в максимальных позициях. Соответственно, с роботом машина будет более легкой, то есть амортизаторы, колеса и двигатель не испытывают сильной нагрузки.
По данному параметру трансмиссия показывает себя лучше, чем автомат, так как она значительно легче. Снаряженная масса такой коробки для легковых автомобилей будет не более 50 кг, в то время как вес автомата только начинается с этой отметки и достигает 100 кг в максимальных позициях. Соответственно, с роботом машина будет более легкой, то есть амортизаторы, колеса и двигатель не испытывают сильной нагрузки.
Недостатки
Что такое коробка автомат робот, мы уже рассмотрели, также обсудили преимущества машины, работающей на таком устройстве. Однако оно имеет и свои недостатки. Следует узнать, какие. Например, главным минусом считается скорость переключения передач. Из-за этого на машину может совершаться сильное давление, особенно если человек стоит в пробке. Зачастую автомобиль разгоняется при помощи рывков, что больше подходит для спортивной езды. Именно поэтому для всех любителей спокойного вождения производители такой коробки передач устанавливают специальный режим. И если с данной проблемой можно справиться, то безопасность езды по склонам на таком автомобиле является довольно актуальным вопросом.
И если с данной проблемой можно справиться, то безопасность езды по склонам на таком автомобиле является довольно актуальным вопросом.
Роботизированная коробка не получает постоянные сигналы от двигателя. Именно поэтому нередко она может отключиться, соответственно, машина будет со склона катиться вниз. Но, к счастью, судя по отзывам, мало кто попадал в такую ситуацию. В целом, учитывая все негативные стороны, данную коробку все равно можно назвать одной из самых лучших.
Признаки неисправности
Отзывы о коробке передач робот мы уже обсудили, далее нужно рассказать о том, в каких местах может ломаться данный прибор. Чаще всего перед глобальным ремонтом человек может заметить, что коробка начинает немножечко чудить, то есть переключаться на нейтральное положение. Как правило, такие симптомы появляются на восьмой год работы или же если человек имеет пробег в 200 тыс. км. Такая беда может случаться при работе на всех режимах коробки передач.
Иногда может проявляться такой симптом, как рывки при трогании с места. Зачастую, если такое появится на автомобилях Nissan и «Тойота», то придется менять ведомый диск сцепления. На 100% точно причину неисправности могут понять специалисты. По отзывам профессионалов и обычных водителей известно, что чаще всего ломается сцепление. Исключением нужно назвать автомобиль Toyota. В его случае робот приходится ремонтировать посредством замены на новый механизм актуатора. Также неисправности могут появляться из-за износа подшипника. Тогда придется покупать практически все детали сцепления, а иногда даже менять весь корпус. Как бы там ни было, если отремонтировать коробку передач, то машина сможет еще продержаться на ходу до 200 тыс. км.
Дополнительные нюансы
Коробка передач робот (что это такое, читайте выше) и автомат имеют много сходств. Обе они пользуются большим спросом. Робот считается доработкой механической трансмиссии. Благодаря блоку управления и другим особенностям с данной коробкой передач можно работать как с механикой, так и с автоматом. При этом конструкция будет намного проще, чем во втором варианте.
При этом конструкция будет намного проще, чем во втором варианте.
Также роботы больше выдерживают нагрузки, за ними не нужен особый уход. Автомобиль с такой коробкой будет потреблять меньше топлива, чем та машина, которая работает на автомате. Более того, водителям не приходится затрачивать время на переключение передач, если сравнивать с гидравлическим приводом.
В статье мы обсудили, как работает коробка передач, что за механизм ею руководит, какие особенности она получила. Таким образом, любой может заметить, что такой вид трансмиссии подойдет для любителей механики и для фанатов автомата. В любой момент ее можно переключить из механики в автомат или воспользоваться роботом. Но из-за того что данное изобретение относительно новое, то и покупать машину с наличием такой детали многие боятся. Однако, судя по отзывам, не стоит опасаться каких-либо непредвиденных обстоятельств, так как данное устройство максимально надежное.
Выводы
Все большую популярность среди автолюбителей набирает коробка передач робот. «Форд» также комплектуется этим новым устройством. Следует заметить, что такая трансмиссия очень удобная, функциональная и при этом неприхотливая. К сожалению, пока не все машины работают с ней, но нередко за дополнительную плату можно поменять коробку передач на эту. Если есть какие-то опасения, что могут возникнуть непредвиденные ситуации, то можно прочесть отзывы о машине, оснащенной такой трансмиссией, и понять, подходит ли такой вариант вам или нет. Как правило, многие водители полностью довольны своим выбором. Именно поэтому при покупке машины лучше обратить внимание на подобные модели.
«Форд» также комплектуется этим новым устройством. Следует заметить, что такая трансмиссия очень удобная, функциональная и при этом неприхотливая. К сожалению, пока не все машины работают с ней, но нередко за дополнительную плату можно поменять коробку передач на эту. Если есть какие-то опасения, что могут возникнуть непредвиденные ситуации, то можно прочесть отзывы о машине, оснащенной такой трансмиссией, и понять, подходит ли такой вариант вам или нет. Как правило, многие водители полностью довольны своим выбором. Именно поэтому при покупке машины лучше обратить внимание на подобные модели.
С механической коробкой передач всё всегда было предельно ясно, но появление новых трансмиссий заводит автолюбителей в тупик при выборе машины. Коробка робот и автомат: в чём разница, каковы преимущества каждой трансмиссии и на чём в итоге остановить свой выбор?
Имея ранее ограниченный выбор трансмиссий, автолюбители при покупке транспортного средства могли отдать предпочтение только механике или автомату. Сейчас же активное развитие автомобильной индустрии привело к появлению новых трансмиссий, и выбор становится уже не таким простым. Интерес представляет коробка робот и автомат: в чём разница между этими трансмиссиями и как между ними выбирать?
Сейчас же активное развитие автомобильной индустрии привело к появлению новых трансмиссий, и выбор становится уже не таким простым. Интерес представляет коробка робот и автомат: в чём разница между этими трансмиссиями и как между ними выбирать?
Чем отличается робот от автомата
Чтобы понять, чем отличается коробка автомат от робота, стоит разобраться с принципом работы каждой из указанных трансмиссий и устройством системы в целом.
Устройство и принцип работы АКПП
В основе автоматики система управления, гидротрансформатор и сама КПП планетарного типа с конкретными шестернями и фрикционами. Благодаря подобной конструкции скорости переключаются в автономном режиме без участия водителя. Ориентиром в данном случае являются такие параметры, как режим движения, нагрузка и обороты двигателя.
Дополнительно рекомендуем прочитать статью нашего специалиста, посвящённую тому, как правильно ездить на автомате.
Читайте также очень познавательную статью нашего специалиста, рассказывающую о том, как правильно ездить на механике.
Что такое вариаторная коробка передач и каковы её особенности? Узнайте об этом из материала нашего специалиста.
Также советуем прочитать статью нашего эксперта, в которой подробно рассказывается об особенностях АКПП Aisin.
Актуальность установки автомата наблюдается на грузовых и легковых машинах, а также автобусах. Если автомобиль переднеприводный, конструкция АКПП дополняется дифференциалом и главной передачей.
Устройство и принцип работы РКПП
Первое, чем отличается робот от автомата — особая конструкция, сочетающая в себе возможности механической и автоматической КПП. По сути, механика в данном случае дополнена автоматическим управлением с исполнительными механизмами, которые отвечают за переключение передач и работы сцепления. Переключение происходит аналогичным образом, как в случае с механической трансмиссией, но водитель в этом не участвует.
Первостепенной целью создания роботизированной КПП являлось снижение стоимости трансмиссии и одновременное слияние всех преимуществ механики и автомата.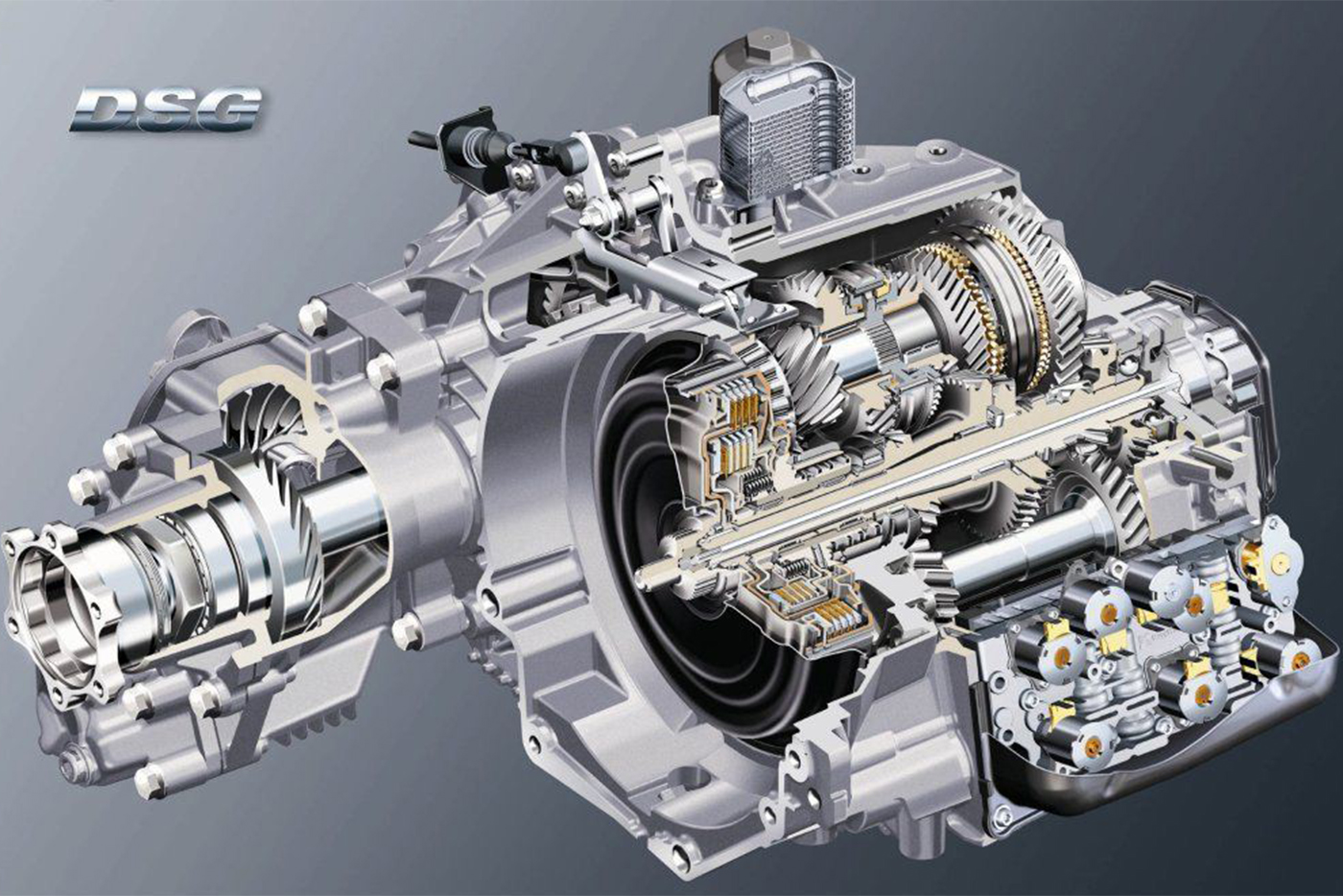 Речь идёт об удобстве управления и комфорте. В результате существует несколько вариантов устройства системы.
Речь идёт об удобстве управления и комфорте. В результате существует несколько вариантов устройства системы.
- На примере автомобилей BMW серии M можно рассмотреть наиболее качественную и известную РКПП под названием Sequental M Gearbox (SMG). Коробка передач 6-ступенчатая, механическая, при этом электронная управляемая гидравлика отвечает за переключение скоростей и отключение сцепления. Передачи переключаются за 0,08 сек.
- На примере Mercedes-Benz A-класса можно рассмотреть другой принцип, где электрогидравлический привод сцепления установлен на базе механики. В переключении скоростей водитель участвует, но педалей здесь только две. Электрический привод самостоятельно отслеживает положение рычага и педали газа, поэтому сцепление в данном случае отсутствует и отключается в автоматическом режиме. Цифры на ABS и датчиках двигателя помогают электронике в расчеёах, чтобы избежать рывков при переключении и резкого прекращения работы двигателя.
- На примере автомобилей Ford и Opel можно рассмотреть третий принцип, где гидронасосы заменены шаговыми двигателями. Несмотря на бюджетность такого варианта, на практике он получился не слишком удачным, что выражается в задержке переключения скоростей и сильных рывках. Тем не менее на Toyota Corolla установлена аналогичная трансмиссия, и упомянутые недостатки здесь отсутствуют.
 Несмотря на бюджетность такого варианта, на практике он получился не слишком удачным, что выражается в задержке переключения скоростей и сильных рывках. Тем не менее на Toyota Corolla установлена аналогичная трансмиссия, и упомянутые недостатки здесь отсутствуют.
Несмотря на бюджетность такого варианта, на практике он получился не слишком удачным, что выражается в задержке переключения скоростей и сильных рывках. Тем не менее на Toyota Corolla установлена аналогичная трансмиссия, и упомянутые недостатки здесь отсутствуют.Основные отличия АКПП от РКПП
Итак, коробка робот и автомат: в чём разница между этими двумя трансмиссиями?
- Первое отличие в конструкции. В случае с роботом это механика с блоком управления, устройство автоматики совсем другое.
- Плавность и скорость переключений у автоматики лучше.
- Почти все АКПП лишены функции ручного переключения, тогда как у роботизированной трансмиссии данная функция присутствует.
- Еще одно отличие робота от автомата заключается в бюджетном ремонте и обслуживании первого.
- Экономия также выражается в том, что робот потребляет меньше масла и топлива.
Преимущества и недостатки трансмиссий
Чтобы окончательно сделать выводы о том, что лучше: робот или автомат, стоит проанализировать положительные и отрицательные стороны каждой из трансмиссий.
Плюсы и минусы АКПП
Сравнительная характеристика преимуществ и недостатков автоматики представлена далее.
| Преимущества | Недостатки |
|
|

- Экономичность на уровне механики.
- Более низкая цена, доступный ремонт и обслуживание. Более экономное потребление масла.
- Быстрое переключение скорости благодаря соответствующим системам на руле.
- Роботизированная коробка передач, в отличие от автоматической, меньше весит.
- Более высокая динамика.
- Недостаточно плавное переключение скоростей, чувствуются рывки.
- После включения заданной передачи ощущается задержка.
- Необходимость переключать рычаг в нейтральное положение при любой остановке.
- Ресурс КПП существенно страдает при каждой пробуксовке.
- Наличие небольшого отката во время начала движения.
Вывод
Чтобы определиться, какая трансмиссия лучше, необходимо сначала определиться с собственными представлениями о комфорте, удобстве и безопасности управления машиной. Изучая характеристики авто во время покупки, помните о том, что отсутствие педали сцепления у обеих рассмотренных трансмиссий может привести в замешательство и неопытный водитель может роботизированную коробку принять за автомат.
Существует 4 вида коробок переключения передач (КПП). Доля автомобилей с роботизированной коробкой передач, классическим автоматом и вариатором на дорогах постоянно растет, ведь все больше автолюбителей отказываются от ручной механики. Коробки передач, работающие без участия человека, постоянно совершенствуются. Их качество, скорость реакции на дорожные события, плавность действий становятся лучше, а любая поездка комфортнее.
Их качество, скорость реакции на дорожные события, плавность действий становятся лучше, а любая поездка комфортнее.
Что такое роботизированная коробка передач
Роботизированная коробка передач (РКПП, или робот) — это часть трансмиссии транспортного средства. Иногда ее путают с автоматической коробкой, но они отличны друг от друга. РКПП состоит из механической КПП, автоматических переключателей электрического или гидравлического типа (актуаторы) и блока управления этими переключателями (ЭБУ). То есть сама коробка — механика, автоматическим является только управление ее работой.
Для водителя РКПП выглядит почти как АКПП. Под рукой нет рычага переключения скоростей (на некоторых моделях вместо него ручка селектора), а под ногами — педали сцепления. Во время езды передачи переключаются в автоматическом режиме.
Как она работает
Механической коробкой передач, снабженной диском сцепления с маховиком двигателя, управляет робот. Алгоритм, заложенный разработчиками в ЭБУ, реагирует на показания датчиков, подавая команды сервоприводам.
Это» выглядит так:
- водитель давит на педаль газа;
- повышаются обороты двигателя, автомобиль ускоряется;
- по достижении заложенных в программу значений срабатывают актуаторы сцепления и вилки переключения;
- происходит включение повышенной передачи.
По тому же принципу во время торможения передачи переключаются с высоких на пониженные. Высокопродуктивные процессоры позволяют создавать сложные программы, имитирующие поведение человека в разных ситуациях. И чем они сложнее, тем динамичнее и комфортнее езда.
Особенности РКПП
Приводы переключения скоростей на роботах оснащаются либо электрическими моторчиками, либо поршневой гидравлической системой. Но выполняют они одну и ту же задачу — передвигают синхронизаторы шестеренок вторичного вала и выжимают сцепление.
Главное отличие в том, что гидравлика работает быстрее и мягче. Но она более дорогая в производстве, поэтому такими РКПП снабжены в основном автомобили высокого класса. Самой востребованной является DSG от немецкого концерна Volkswagen.
Но она более дорогая в производстве, поэтому такими РКПП снабжены в основном автомобили высокого класса. Самой востребованной является DSG от немецкого концерна Volkswagen.
ЭБУ для коробок делают и отдельным, и совмещенным с блоком управления ДВС. Последний вариант наиболее целесообразен, если алгоритм управления робота учитывает показания тех же систем, что и управление двигателем, например ABS или ESP.
Устройство сцепления в роботе
Роботизированные коробки по методу взаимодействия с двигателем бывают двух типов:
- однодисковые;
- двухдисковые (используют два сцепления, включаемые попеременно).
Однодисковая коробка ничем не отличается от механической. В ней есть первичный и вторичный валы.
Первичный соединен с диском сцепления. Вторичный вал передает крутящий момент непосредственно на колеса. Оба вала взаимодействуют посредством шестерней разного диаметра. Переключение происходит в тот момент, когда выбранная для нужной передачи шестерня на вторичном валу блокируется. В РКПП это делают электрические манипуляторы, получающие сигнал от ЭБУ. Гидравлические приводы-манипуляторы на однодисковых коробках используются крайне редко.
В РКПП это делают электрические манипуляторы, получающие сигнал от ЭБУ. Гидравлические приводы-манипуляторы на однодисковых коробках используются крайне редко.
Двухдисковые имеют два ведущих первичных вала, каждый из которых соединен со своим диском сцепления. Один вал отвечает за четные передачи, а второй — за нечетные и заднюю. Такое техническое решение позволило делать включение выбранной передачи более плавным. Синхронизаторы приводов работают попеременно. В момент перехода на одном валу с 1 на 2 передачу ЭБУ уже дает сигнал на подготовку к включению 3. Поэтому их еще называют преселективными, т. е. с предварительным выбором. В результате сам процесс переключения ускоряется до 0,2 и менее секунд.
Некоторые производители так настраивают работу актуаторов и алгоритмы, что робот функционирует не хуже человека.
Режимы работы
Управление водителем коробкой передач сводится к выбору режима селектором:
- Нейтраль обозначается «N». В этом режиме двигатель работает, но крутящий момент на колеса не передается. Включать перед началом движения, после остановки, при длительной стоянке.
- Движение вперед обозначается «А/М», «Е/М» или «D». Включив этот режим, отпускают педаль тормоза и нажимают педаль газа. Машина движется вперед, автоматически переключая скорости в зависимости от ускорения или торможения.
- Ручное управление обозначается «М». Автомобиль движется вперед, водитель самостоятельно переключает скорости, нажимая подрулевые лепестки или селектор в положения «+» или «-». При этом переключение происходит только на одну ступень.
- Движение задним ходом обозначается «R». Выбрав этот режим, можно ехать назад.
- На некоторых РКПП возможно наличие режимов «зимний» и «спортивный».
 В этом режиме двигатель работает, но крутящий момент на колеса не передается. Включать перед началом движения, после остановки, при длительной стоянке.
В этом режиме двигатель работает, но крутящий момент на колеса не передается. Включать перед началом движения, после остановки, при длительной стоянке.Есть также и свои особенности при езде, к которым водитель должен привыкнуть, иначе будет попадать в неприятные ситуации.
- Езда в автоматическом режиме подразумевает дороги с хорошим твердым покрытием. Заехав летом в грязь, а зимой в рыхлый глубокий снег, рискуете забуксовать. Алгоритм станет выдавать ошибочные команды, и передачи будут включаться некорректно. Такие ситуации повышают износ деталей и механизмов, что увеличивает риск поломок.
- Педаль газа нужно нажимать плавно, ни в коем случае нельзя ее давить в пол. Нужно следить за оборотами двигателя, фиксируя моменты переключения скоростей, и избегать перегазовки.
- Если на авто отсутствует функция помощи при трогании в подъем, нужно поступать так же, как при пользовании ручной КПП, — использовать стояночный тормоз для предотвращения отката назад.
- При длительных остановках (больше 60 секунд) на запрещающий сигнал светофора или в пробке нужно переключать селектор в положение «нейтраль».
- Для длительной остановки на парковке сначала переводят селектор в «нейтраль», затем включают стояночный тормоз, после чего отпускают педаль тормоза и глушат двигатель.
- Каждый производитель указывает, с какой частотой по пробегу нужно проводить перекалибровку ЭБУ (ее еще называют инициализацией или обучением). Это нужно делать из-за износа диска сцепления. Следует проводить процедуру каждые 10000-15000 км.
- Зимой, при низких температурах воздуха, прогрев коробки занимает ровно столько времени, сколько его потребуется на прогрев двигателя.
 Заехав летом в грязь, а зимой в рыхлый глубокий снег, рискуете забуксовать. Алгоритм станет выдавать ошибочные команды, и передачи будут включаться некорректно. Такие ситуации повышают износ деталей и механизмов, что увеличивает риск поломок.
Заехав летом в грязь, а зимой в рыхлый глубокий снег, рискуете забуксовать. Алгоритм станет выдавать ошибочные команды, и передачи будут включаться некорректно. Такие ситуации повышают износ деталей и механизмов, что увеличивает риск поломок. Это нужно делать из-за износа диска сцепления. Следует проводить процедуру каждые 10000-15000 км.
Это нужно делать из-за износа диска сцепления. Следует проводить процедуру каждые 10000-15000 км.Основные отличия РКПП от АКПП
Но из-за того, что конструктивно это разные механизмы, в эксплуатации и обслуживании они отличаются друг от друга:
- В АКПП частью рабочего механизма является жидкость ATF. В РКПП для смазки механических узлов присутствует масло, но его в несколько раз меньше по объему. Кроме того, его надо гораздо реже менять.
- Автомобиль с роботом динамичнее в движении и потребляет меньше топлива. Потому что масса и габариты автомата превосходят те же показатели у робота, а переключения скоростей в РКПП происходят быстрее.
- На машине с АКПП ездить гораздо комфортнее, потому что передачи переключаются плавно, а роботизированная коробка не может так гасить рывки.
- Износ фрикционов идет медленнее, чем стирание диска сцепления.
- На роботизированной коробке можно переключиться на ручное управление. Оно не полное, потому что переключение производится только на одно положение и нельзя перейти, например, со 2 сразу на 4. Но автомат не дает водителю и такой возможности.

Плюсы и минусы
Широкое распространение роботизированные коробки передач получили благодаря своим достоинствам. Однако у них есть и недостатки, о которых лучше знать до покупки автомобиля, чтобы быть к ним готовым.
- Время разгона до 100 км/ч при аналогичности других параметров почти не отличается от времени разгона на ручной коробке.
- Расход топлива сопоставим с расходом на автомобилях с РКПП и до 30% ниже, чем на моделях с автоматическими коробками.
- Диск сцепления изнашивается медленнее, чем при ручном переключении.
- Робот работает аккуратнее человека, поэтому валы и шестерни коробки будут изнашиваться меньше, а служить дольше, чем в ручной механике.
- Стоимость ремонта и обслуживания в среднем ниже, чем у АКПП.

- Во время движения при включении скоростей могут ощущаться рывки и дерганье.
- Алгоритм, заложенный в ЭБУ, не обладает реакцией человека на ситуации, возникающие во время движения. Поэтому могут возникать ошибки, когда необходимо экстренно разогнаться или затормозить.
- Роботу для принятия решения нужны более «длинные» передачи, а для сохранения динамики при этом необходим более мощный двигатель.
- Если нет системы помощи при подъеме, то во время начала движения «в гору» возможен откат автомобиля назад.
- Невозможность «прошивки» блока управления. Алгоритм переключения передач — это разработка производителя, которая корректировке не подлежит.
- Движение в пробках плохо сказывается на узлах и механизмах коробки, приводя их к раннему разрушению.
Признаки неисправности
Как и любой механизм, роботизированная коробка подвержена износу во время работы и может ломаться. Неисправности делятся на механические и блока управления. Каждая имеет свои проявления.
Неисправности делятся на механические и блока управления. Каждая имеет свои проявления.
Признаки механических поломок:
- пробуксовка во время движения по ровному твердому дорожному полотну говорит об износе диска сцепления;
- если не переключаются передачи, это может говорить о поломке актуаторов;
- посторонние шумы во время движения могут быть вызваны целым рядом причин, и для выявления поломки следует провести диагностику узлов и механизмов;
- усиление рывков во время переключения передач может происходить из-за износа и разрушения зубчатых соединений на валах коробки, износа вилок выбора шестеренок;
- загоревшаяся лампа Check Engine на панели приборов говорит о необходимости компьютерной диагностики.
Признаки ошибок в ЭБУ:
- сбивается режим работы робота, переключения передач происходят некорректно и не вовремя;
- рывки во время включения передач становятся сильнее;
- при выборе селектором положения движения вперед или назад машина не едет;
- загорается контрольная лампочка Check Engine.

Чтобы разобраться, из-за чего возникли неприятности, нужно провести правильную диагностику с применением специального оборудования.
Актуальность коробки в России
Автомобили с коробками-роботами у наших автолюбителей пользуются хорошим спросом. Опросы показывают, что доля россиян, готовых купить авто с РКПП, колеблется в пределах 15-20%. При этом надо отметить, что доля желающих пользоваться классическим автоматом все же в 2 раза выше.
В крупных городах платежеспособные слои населения выбирают АКПП из-за более комфортной езды и гораздо меньших проблем, связанных с эксплуатацией в условиях частых пробок на дорогах. Притом цены на автомат и хороший преселективный агрегат находятся на одном уровне. Но, если цена на горючее будет продолжать расти, многие предпочтут авто с РКПП (как более дешевый в эксплуатации), особенно когда поездки не ограничиваются маршрутом работа-дом.
Многим сейчас известно, что много иностранных современных автомобилей выпускаются с автоматической КПП. Однако те водители, которые ездили на автомате, прекрасно чувствуют разницу, как такая коробка уступает «механике» в скорости разгона автомашины, и еще, что немаловажно, в экономичности горючего. Поскольку автоматическая коробка передач непосредственно в момент переключения несколько секунд «думает», и происходит повышенный топливный расход. Расходуется больше горючего и во набора скорости при разгоне.
Исходя из анализа обеих популярных КПП, специалистами была разработана так называемая роботизированная коробка передач, получившая в простонародье название довольно простое «робот». А многие ли знают, что это такое? Все не так-то и сложно, обозначенное устройство собой представляет классическую МКПП, однако она по понятным причинам относится к классу АКПП. Большое отличие от «механики» заключается в следующем: она отпускает сцепление, практически моментально включает передачу, а роботизированная современная трансмиссия обладает сцеплением, только уже в автоматическом режиме. Предлагаем вам изучить далее материал, дабы выяснить, что означает РКПП, как устроена, а еще какие имеет особенности.
Предлагаем вам изучить далее материал, дабы выяснить, что означает РКПП, как устроена, а еще какие имеет особенности.
Как устроена роботизированная коробка передач
Даже те, кто прекрасно знают и понимают, что это такое плюс что представляет собой набирающая стремительно популярность роботизированная коробка передач, до конца не понятно как все устроено, и чем она отличается от «автомата». Ранее вкратце было сказано, что данное устройство самостоятельно отпускает сцепление, точно также, как бы это было при механике, но только выжимает его в таком случае водитель, и моментом включает передачу, осуществляется это посредством специального блока питания, отправляющего соответствующие команды 2-ум современным сервоприводам. Сам водитель и его манера езды для устройства автомобильной РКПП своими действиями формируют соответствующую информацию, на основе которой роботизированная КПП будет работать. Полностью управление роботом берет на себя специализированный электронный блок, работающий по определенному, заложенному специалистами алгоритму. Устройство имеет плюсы и минусы, но самый главный плюс робота в следующем: он в себе объединил такие вещи, как удобство и даже простоту эксплуатации «автомата» и ощутимая экономичность и проверенная надежность «механики», что значит: такая КПП непременно должна завоевать сердца автомобилистов.
Устройство имеет плюсы и минусы, но самый главный плюс робота в следующем: он в себе объединил такие вещи, как удобство и даже простоту эксплуатации «автомата» и ощутимая экономичность и проверенная надежность «механики», что значит: такая КПП непременно должна завоевать сердца автомобилистов.
Бывают такие моменты в эксплуатации автомобиля что вам нужен не один мастер а скажем сразу и электрик и ходовик, вам на помощь придет автосервис Сенатор полного цикла ремонта авто, вам там помогут отремонтировать сразу все возможные поломки в авто.
Специалисты уверяют, РКПП принадлежит к серии «автомат», по той причине, что когда хотя бы 1 из процессов в коробке автоматизировано, то он соответственно и относится к этой категории. Основой для робота послужила классическая механическая коробка, оснащенная электронным блоком, но по конструкции они в любом случае имеют свои отличия и специфику.
Продолжаем выяснять, что это такое «робот». Любая автоматическая трансмиссия имеет фрикционное сцепление. Как правило, установлен дисковое сцепление, или же целый пакет фрикционных дисков. На РКПП в более современном исполнении установлено 2 таких диска сцепления, и это как раз позволяет без какой-либо потери мощности своевременно и точно передачи переключать.
Как правило, установлен дисковое сцепление, или же целый пакет фрикционных дисков. На РКПП в более современном исполнении установлено 2 таких диска сцепления, и это как раз позволяет без какой-либо потери мощности своевременно и точно передачи переключать.
Самое главное, чем отличаются современные «роботы» — по отпуску сцепления, плюс по приводу переключения скоростей. Дополнительно важно отметить, что привод бывает исключительно электрическим и во 2-ом случае гидравлическим, других нет и быть не может. Каждый из указанных приводов имеет свои плюсы и минусы, которые очевидны каждому водителю индивидуально. Электрический мотор так сказать выполняет всю задачу в специальном электрическом приводе, а уже в гидравлическом, поставленную основную задачу выполняют гидравлические специальные цилиндры, выполняющие свою работу по поступающему к ним сигналу встроенных в систему электромагнитных клапанов.
В системе электрический привод имеет следующий плюс: он мало потребляет энергии, в то время как плюс гидравлического привода в системе – это высокая скорость при переключении скоростей.
Важно выяснить и какие недостатки встречаются у каждой из систем? Электрическая – слишком низкая скорость переключения, далее гидравлическая — это весьма высокая потребность в энергии, следовательно такие роботизированные коробки часто ставят на дорогостоящие автомобили, с блоком электрическим оснащают авто бюджетной категории.
Когда получает соответствующий сигнал системный электронный блок от датчиков, то создается некий стиль переключения скоростей, и отправляет сразу же его системам, так сказать подчиняющимся ему, а они начинают работать по этой самой системе. Следует добавить, что электронный блок всегда и совместно работает с силовым агрегатом и системой ABS. Продолжим выяснять, что значит РКПП и какими качествами обладает.
Все о недостатках и качествах роботизированной коробки передач
Мы почти выяснили, что означает РКПП, осталось узнать больше о ней, предлагаем ознакомиться с плюсами рассматриваемой нами сейчас коробки:
- Роботизированная коробка передач, внимание! В отличие от любой другой КПП потребляет меньше всего масла. Экономичный расход масла и топлива в целом.
- Коробка в обращении довольно простая, и надежная.
- Одним из положительных качеств можно назвать возможность вручную переключать скорости.
 Экономичный расход масла и топлива в целом.
Экономичный расход масла и топлива в целом.Какие недостатки у «робота»:
- На бюджетных автомобилях стоит «робот» без двойного сцепления, это сильно влияет на резкое переключении скоростей.
- Недостаток который ощущается при эксплуатации автомобиля в городских условиях. Во время постоянных простоях в пробках коробка быстро изнашивается, но всегда есть возможность перейти на ручное управление.
- Если присутствует лишь 1 диск сцепления, то переключаются передачи не так быстро, как хотелось бы. Более современные версии с 2-мя дисками ставят даже на спортивных авто, и не происходит вообще ни малейшей потери мощности при переключении скоростей.
В чем отличия РКПП от остальных коробок передач
Что означает, какие недостатки и видимые преимущества имеет «робот» более менее ясно. Предлагаем больше узнать, чем отличается роботизированная коробка передач от других КПП.
Самое главное сравнение рассматриваемой нами КПП должно быть непосредственно с «механикой», поскольку наш «робот» произошел именно от нее. Самое главное отличие в том, что теперь водителю нет надобности управлять сцеплением. Все за него делает электронный блок, специально разработанный для этой цели. Ранее было сказано, что этот самый блок подает сигнальные команды 2-ум сервоприводам, что означает, что 1-ый привод «выжимает» сцепление, а 2-ой – включает 1-ую передачу. Так называемый сервопривод, «выжимающий» сцепление, как только переключилась скорость, отпускает его и авто трогается. Точно по такому же нехитрому принципу происходят и все остальные скоростные переключения. С классической механической коробкой, если вдуматься, различия небольшие, а это означает, что такие виды обладают 4-6-скоростными трансмиссиями.
Трансмиссия автоматическая по существу в разы проигрывает «роботу», только который оснащен 2-мя сцеплениями. АКПП на смену «механике» пришла в далеких 1950-годах и покорила всех своей простотой. Основным недостатком автоматической коробки является ее чрезмерно большой вес. Также «автомат» не дергается и плавно переключает скорости, чем это происходит у «робота» с 1-м диском сцепления. А у механической КПП АКПП выигрывает лишь простой эксплуатации.
Основным недостатком автоматической коробки является ее чрезмерно большой вес. Также «автомат» не дергается и плавно переключает скорости, чем это происходит у «робота» с 1-м диском сцепления. А у механической КПП АКПП выигрывает лишь простой эксплуатации.
Как известно, автоматические трансмиссии бывают с разным количеством ступеней, самое большое – 7-8-ступенчатая КПП.
А есть еще и вариатор, что это такое? От механической и автоматической КПП вариатор отличается тем, что у него отсутствуют в принципе передачи. 2 шкива лежат у него в основе, 1 из которых соединен непосредственно с трансмиссией, а в 2-ой силовым агрегатом автомобиля. Движение в таком случае передается ремнем, или же цепью. У вариатора имеется один большой недостаток – из-за гидравлической муфты пониженный коэффициент работы.
Подведем итоги
Разобравшись с тем, что это такое и какие плюсы/минусы и основные отличая, имеет роботизированная коробка передач можно выделить для себя то, что предпочтительнее будет именно для вас.
Каждый водитель, новичок или более опытный обязательно выбирает трансмиссию под свои предпочтения, привычки и даже под стиль управления транспортным средством. Тут самое главное, что следует понять, что роботизированная коробка передач, является классической механической КПП, но с добавленным к ней полностью автоматическим переключением скоростей и, конечно же, сцеплением.
>
Шестерни— система сборки 15 мм
Шестерниимеют зубья, которые входят в зацепление с другими шестернями для передачи крутящего момента. Шестерни можно использовать для изменения скорости, крутящего момента (крутящего момента) или направления исходной выходной мощности двигателя. Чтобы шестерни были совместимы друг с другом, зубья зацепления должны иметь одинаковую форму (размер и шаг).
Зубчатые колеса предлагают большую гибкость в преобразовании движения, чем звездочки и цепь, потому что существует большее разнообразие размеров шестерен.![]()
Есть много разных типов шестерен; одна из самых простых и наиболее часто используемых — это прямозубая цилиндрическая шестерня , и именно этот тип шестерни используется в системе сборки REV 15 мм. Цилиндрические шестерни состоят из диска с прямыми зубьями, выступающими радиально (наружу от центра), и эти шестерни будут правильно зацепляться с другими шестернями, только если они находятся на параллельных валах.
Общие и важные особенности цилиндрической зубчатой передачи показаны на изображении ниже.
Число зубцов (N) — это общее количество зубцов (выступов) по всей окружности шестерни. Для шестерен с очень небольшим или очень большим количеством зубьев легко просто подсчитать количество зубьев. Однако для шестерен с большим числом зубьев или с меньшими зубьями попытка подсчета зубьев не очень практична или точна.
Однако для шестерен с большим числом зубьев или с меньшими зубьями попытка подсчета зубьев не очень практична или точна.
Модуль (M) представляет собой величину делительного диаметра в мм на зуб. Шестерни с более высоким модулем будут иметь большие зубья. Модуль (M) можно рассчитать с использованием некоторой комбинации делительного диаметра (PD), количества зубьев (N) или внешнего диаметра (OD).
Уравнения для вычислительного модуля:
M = OD / (N + 2) M = OD / (N + 2) M = OD / (N + 2)
Для помощи в расчетах: Пластиковые шестерни REV имеют 0. 75, а в REV Metal Gears — 0,8.
75, а в REV Metal Gears — 0,8.
Шаговый диаметр (PD) — это воображаемая окружность, которая совпадает с делительным диаметром любой другой шестерни, когда шестерни расположены правильно. Делительный диаметр всегда будет меньше внешнего диаметра шестерни.
При создании упрощенных моделей шестерен сначала создайте окружность с делительным диаметром для каждой шестерни, используемой в системе, затем ограничьте касательные окружностей (едва касаясь друг друга) друг к другу. Диаметр шага (PD) можно рассчитать с использованием некоторой комбинации модуля (M), количества зубьев (N) или внешнего диаметра (OD).
Уравнения для расчета среднего диаметра:
PD = M × NPD = M × NPD = M × N
PD = (OD × N) / (N + 2) PD = (OD × N ) / (N + 2) PD = (OD × N) / (N + 2)
PD = OD − 2MPD = OD -2MPD = OD − 2M
Внешний диаметр (OD) — истинный внешний диаметр шестерни. Внешний диаметр всегда будет больше, чем средний диаметр . Внешний диаметр следует использовать при проверке натяжения при размещении шестерен очень близко к другим конструкциям. Наружный диаметр (OD) можно рассчитать по формуле ниже.
Внешний диаметр всегда будет больше, чем средний диаметр . Внешний диаметр следует использовать при проверке натяжения при размещении шестерен очень близко к другим конструкциям. Наружный диаметр (OD) можно рассчитать по формуле ниже.
Уравнения для внешнего диаметра:
OD = (N + 2) × MOD = (N + 2) × MOD = (N + 2) × M
Система сборки REV 15 мм включает в себя как металлические и пластиковые шестерни.В таблице ниже приведены некоторые основные характеристики различных типов шестерен.
† Большинство металлических шестерен REV 15 мм изготовлены из алюминия. Есть три исключения. Шестерни с 12 и 28 зубьями изготовлены из спеченной стали. Шестерня с 12 зубьями изготовлена из обработанной латуни.
Есть три исключения. Шестерни с 12 и 28 зубьями изготовлены из спеченной стали. Шестерня с 12 зубьями изготовлена из обработанной латуни.
Металлические и пластиковые шестерни совместимы с оборудованием M3 с шагом 8 мм.
Все пластиковые шестерни REV Robotics имеют монтажную схему отверстия под болт M3 с шагом 8 мм.Это упрощает прямую установку кронштейнов и экструзии REV Robotics на шестерни. Конструкция с перепонками в сочетании с большой шириной поверхности и малым профилем зубьев увеличивает прочность шестерни без значительного увеличения веса. Пластиковые шестерни REV Robotics предназначены для установки на шестигранный вал диаметром 5 мм, что устраняет необходимость в специальных ступицах и установочных винтах.
REV Metal Gears НЕ совместимы с REV Plastic Gears. Зубчатые колеса из других строительных систем могут иметь очень похожий профиль зуба, но не полностью совпадать.В некоторых ситуациях можно успешно использовать две системы шестерен вместе, но это не рекомендуется.
Зубчатые колеса из других строительных систем могут иметь очень похожий профиль зуба, но не полностью совпадать.В некоторых ситуациях можно успешно использовать две системы шестерен вместе, но это не рекомендуется.
Metal Gears разработаны для работы с шестигранными валами REV 5 мм в условиях высоких нагрузок. Металлические шестерни REV Robotics также имеют схему отверстий M3, но этот узор фокусируется на том, чтобы шестерни можно было сдвоить для дополнительной прочности. В целом, металлические шестерни REV имеют более высокий предел текучести, чем пластиковые шестерни REV, особенно когда металлические шестерни сдвоены. Толщина зубьев шестерни, известная как ширина поверхности, является основным компонентом прочности шестерни.
На лицевой стороне REV Metal Gears отображается количество зубьев шестерни, помогающее в расчетах!
Все металлические шестерни REV более узкие, чем пластиковые шестерни, что позволяет использовать компактные трансмиссии и коробки передач в пределах той же ширины 15 мм, что и экструзионно-пробивная трубка (REV-41-1453).
Соединение двух или более шестерен вместе известно как зубчатая передача . Выбор шестерен в зубчатой передаче как большего или меньшего размера относительно входной шестерни может либо увеличить выходную скорость , либо увеличить выходной крутящий момент , но это не повлияет на общую мощность .
Физические концепции, такие как скорость и мощность, находят множество применений в системе REV 15mm Build System. Щелкните здесь, чтобы узнать о них больше.
Передаточное число — это соотношение размеров двух шестерен. Например, на изображении ниже входная шестерня представляет собой шестерню с 15 зубьями, а выходная шестерня — с 72 зубьями. Итак, передаточное число составляет 15 зуб .: 72 зуб. Передаточное число Размер от входной (ведущей) шестерни к выходной (ведомой) шестерне определяет, будет ли выходной сигнал более быстрым (меньший крутящий момент) или большим крутящим моментом (более медленным).Передаточное число пропорционально изменению скорости и крутящего момента между ними.
Чтобы узнать больше о передаточных числах и их влиянии на скорость и крутящий момент, ознакомьтесь с разделом Передаточное число
На изображении выше входная шестерня с 15 зубьями вращается по часовой стрелке. Когда входная шестерня вращается, она давит на выходную шестерню в месте зацепления зубьев. Это действие передает движение на ведомую шестерню, но заставляет ведомую шестерню вращаться в направлении, противоположном входному.
Один из способов изменить направление вращения зубчатой передачи — это добавить ролики . Холостые колеса находятся между входной и выходной шестернями в зубчатой передаче и могут помочь вам управлять вращением выходной шестерни. Чтобы узнать больше о натяжных роликах, ознакомьтесь с разделом Idler
Если вы используете шестерни для передачи движения на большие расстояния, например, в трансмиссии, пожалуйста, ознакомьтесь с разделом «Зубчатая передача», чтобы узнать больше о том, как правильно использовать это своего рода механизм.
Как упоминалось в разделе «Технические характеристики», шестерни REV работают с шестигранным валом 5 мм для движения по зубчатой передаче. Чтобы узнать больше об использовании шестигранных валов и правильной поддержки и ограничения движения, посетите страницы, указанные ниже:
Чтобы шестерни работали эффективно и не повреждались, важно правильно отрегулировать межцентровое расстояние . Шестерни, обозначенные ДЕТАЛЬ А на рисунке ниже, могут работать при очень небольшой нагрузке, но они определенно не будут работать и будут пропускать работу при любой значительной нагрузке.Шестерни в этом примере расположены слишком далеко друг от друга, поэтому зубья каждой шестерни почти не соприкасаются друг с другом. Шестерни в ДЕТАЛИ B правильно расположены и обеспечивают плавную и надежную работу.
Иногда в конструкции может быть желательно сложить вместе несколько одинаковых шестерен на валу, чтобы увеличить грузоподъемность шестерен. В случае, когда количество зубьев шестерни не делится на шесть, из-за того, как они ориентированы при установке на шестигранный вал, зубья могут не совпадать между двумя шестернями.Чтобы обеспечить одинаковую синхронизацию всех шестерен, используйте выемку центрирующего вала, чтобы установить все шестерни на вал с одинаковой ориентацией.
Знание метки совмещения гарантирует, что все зубья шестерни будут совмещены на валу. На приведенном ниже рисунке показан пример базовой руки робота, которая может поднимать тяжелый груз. Использование двух шестерен для подъема рычага удваивает взаимодействие материала с шестигранным валом и позволяет рычагу выдерживать более тяжелые нагрузки.
Что такое шестерни и для чего они нужны? — Урок
.Быстрый просмотр
Уровень оценки: 5 (5-7)
Требуемое время: 45 минут
Зависимость уроков: Нет
Тематические области: Физика, наука и технологии
Подпишитесь на нашу рассылку новостей
Резюме
Студенты знакомятся с важным инженерным элементом — снаряжением.Различные типы шестерен используются во многих технических устройствах, включая заводные игрушки, велосипеды, автомобили и нецифровые часы. Студенты узнают о различных типах шестерен и о том, как они работают в машинах. Они управляют и комбинируют прямозубые шестерни LEGO в качестве упражнения с передаточными числами. Они видят, как шестерни и различные механизмы зубчатой передачи используются для изменения скорости, крутящего момента и направления источника энергии. Это подготавливает их к применению этих знаний в четырех связанных действиях для создания успешных решений проблем проектирования с использованием роботов LEGO® MINDSTORMS® EV3.Предоставляется презентация PowerPoint®, предварительные и последующие викторины и рабочий лист. Эта инженерная программа соответствует научным стандартам нового поколения (NGSS).Инженерное соединение
Шестерни представляют собой важный компонент многих механических устройств и обычно отождествляются с инженерами-механиками (которых иногда называют «зубчатыми колесами»). Шестерни — это простые механизмы, состоящие из колеса и оси. Хотя до этого урока ученикам это может быть не очевидно, шестеренки широко распространены в нашем мире.Они встречаются в механизмах автомобилей, грузовиков, мотоциклов, насосов, аналоговых часов, ветряных турбин, бульдозеров и большинства инженерных машин.
Цели обучения
После этого урока учащиеся должны уметь:
- Объясните роль шестерен в механических устройствах.
Образовательные стандарты
Каждый урок или задание TeachEngineering соотносится с одним или несколькими научными дисциплинами K-12, образовательные стандарты технологии, инженерии или математики (STEM).
Все 100000+ стандартов K-12 STEM, охватываемых TeachEngineering , собираются, обслуживаются и упаковываются сетью стандартов достижений (ASN) , проект D2L (www.achievementstandards.org).
В ASN стандарты имеют иерархическую структуру: сначала по источникам; например , по штатам; внутри источника по типу; например , естественные науки или математика; внутри типа по подтипу, затем по классу, и т. д. .
NGSS: научные стандарты нового поколения — наука Общие основные государственные стандарты — математика- Поймите концепцию отношения и используйте язык отношений, чтобы описать соотношение между двумя величинами.
(Оценка
6) Подробнее
Посмотреть согласованную учебную программу
Вы согласны с таким раскладом? Спасибо за ваш отзыв!
- Поймите концепцию единичной ставки a / b, связанной с соотношением a: b, где b 0, и используйте язык ставок в контексте отношения отношения.(Оценка
6) Подробнее
Посмотреть согласованную учебную программу
Вы согласны с таким раскладом? Спасибо за ваш отзыв!
- Бегло делите многозначные числа по стандартному алгоритму.(Оценка
6) Подробнее
Посмотреть согласованную учебную программу
Вы согласны с таким раскладом? Спасибо за ваш отзыв!
- Студенты разовьют понимание характеристик и области применения технологий.(Оценки
К —
12) Подробнее
Посмотреть согласованную учебную программу
Вы согласны с таким раскладом? Спасибо за ваш отзыв!
- Студенты разовьют понимание взаимоотношений между технологиями и связей между технологиями и другими областями обучения.(Оценки
К —
12) Подробнее
Посмотреть согласованную учебную программу
Вы согласны с таким раскладом? Спасибо за ваш отзыв!
- Студенты разовьют понимание атрибутов дизайна.(Оценки
К —
12) Подробнее
Посмотреть согласованную учебную программу
Вы согласны с таким раскладом? Спасибо за ваш отзыв!
Какое альтернативное выравнивание вы предлагаете для этого контента?
Рабочие листы и приложения
Посетите [www.teachengineering.org/lessons/view/umo_challenges_lesson02], чтобы распечатать или загрузить.Больше подобной программы
Вступите в передачуУчащиеся знакомятся с зубчатыми передачами и передаточными числами с помощью роботов, механизмов и программного обеспечения LEGO® MINDSTORMS® EV3. Они учатся создавать трансмиссионную часть автомобиля, проектируя зубчатые передачи с различными передаточными числами. После того, как учащиеся узнают принципы передаточных чисел, они приступят к их применению…
Что такое двигатель и как работает датчик вращения?Студенты узнают об электродвигателях и датчиках вращения. Они узнают, что двигатели преобразуют электрическую энергию в механическую и обычно включают датчики вращения для измерения расстояния.Учащиеся создают базовую программу, используя интерфейс LEGO® MINDSTORMS®, для управления двигателем для перемещения …
Предварительные знания
Перед этим уроком студентам рекомендуется пройти предыдущий раздел из серии «Как работают датчики?»
Введение / Мотивация
Многие студенты знакомы с велосипедными шестернями.авторское право
Авторское право © 2009 Keithonearth, Wikimedia Commons http://commons.wikimedia.org/wiki/File:Derailleur_Bicycle_Drivetrain.svg
У кого из вас есть велосипеды? Когда вы едете на велосипеде, как энергия, вырабатываемая вашими ногами, используется, чтобы толкать велосипед вперед? Есть идеи? (Выслушайте идеи студентов.) Педали на велосипеде вращают шестерню (выглядит как диск с зубьями на нем), которая вращает другую шестерню (на самом деле, шкив) через цепь. Взятые вместе, мы обычно называем эти детали «велосипедными шестернями».«Как работает эта договоренность?
В сегодняшнем уроке мы рассмотрим различное расположение шестерен, называемых «зубчатыми передачами», и узнаем, как редукторные устройства могут изменять скорость, крутящий момент и направление источника энергии. Вам важно понять эти концепции, чтобы вы были готовы решать предстоящие инженерные задачи в этом модуле! После урока учащиеся могут применить свои новые знания о механизмах и использовать их при разработке сумобота LEGO с соответствующей задачей по дизайну заданий Sumobot Challenge.Затем, в качестве дополнительной задачи, учащиеся могут выполнить соответствующие задания Line-Follower Challenge, где им предлагается запрограммировать роботов LEGO с цветовыми датчиками на движение по черной линии, и Robot Soccer Challenge, где они узнают, как можно запрограммировать два кубика LEGO EV3 на отправку и получать сообщения друг от друга и отвечать соответственно.
(Продолжите, показав презентацию и предоставив содержание раздела «Предпосылки урока».)
Предпосылки и концепции урока для учителей
Этот второй урок модуля знакомит студентов с концепцией шестеренок, которая подготавливает их к последующим задачам проектирования модуля, в которых используются роботы LEGO MINDSTORMS EV3.Пусть учащиеся работают индивидуально или в небольших группах, в зависимости от наличия принадлежностей для роботов LEGO.
Будьте готовы показать студентам 17 слайдов «Что такое шестерни?» Что они делают? Презентация, файл Microsoft ® PowerPoint ® для проведения урока. Подготовьте компьютер / проектор с доступом в Интернет, чтобы также показать два онлайн-видео и анимацию на веб-сайте. Заранее сделайте копии предварительной викторины Gears и заключительной викторины Gears (по одной на каждого учащегося), представленных в виде приложений и слайдов, а также рабочего листа «Приступите к работе» (по одному на каждого учащегося).
Во время урока каждой группе необходимы следующие материалы:
Пример прямозубой шестерни LEGO и оси из основного набора. Авторское право
Авторские права © Pinterest https://www.pinterest.com/pin/58687601365962501
Что такое шестерни? Что они делают? План презентации (слайды 1-17)
- Проведите предварительную викторину, раздав бумажные копии; викторина также находится на слайде 2 . Ответы представлены для учителя на слайде 3 для обсуждения после того, как учащиеся завершат тест.
- ( слайд 4 ) Представьте цель урока: что такое шестеренки и для чего они нужны? Мотивируйте учащихся обратить внимание, указав на то, что концепции в сегодняшней презентации важно изучить и понять, чтобы успешно справляться с задачами проектирования, в которых они будут участвовать во время следующего занятия.
- Опишите, что такое шестеренка, используя слайд 5 и отличное 11-минутное видео «Основы передач» (ссылка на слайд 6 и в разделе «Дополнительная поддержка мультимедиа»).Шестерни бывают разных размеров и типов; они используются для изменения скорости, крутящего момента и направления источника питания. Темы, затронутые в видео: типы передач, вращение шестерен, передаточное число, скорость вращения, механическое преимущество и примеры использования (речные замки и велосипеды).
- (, слайд 7 ) Представьте обзор различных типов шестерен, включая прямозубые, червячные, конические и шкивы, как показано на рисунках.
- Либо индивидуально, либо в небольших группах (в зависимости от количества доступных материалов) предложите учащимся выполнить следующее простое практическое упражнение, чтобы закрепить концепцию шестеренок.Дайте каждой группе балку 1/16, две оси №6 с втулкой на задней стороне, одну шестерню с 8 зубьями, одну шестерню с 40 зубьями и одну дополнительную шестерню любого размера (например, шестерню с 24 зубьями).
- Посоветуйте ученикам собрать две шестерни разных размеров с помощью простой балки, как показано на слайде , а затем объясните передаточные числа. Передаточное число говорит нам, сколько оборотов одной передачи вызывает количество оборотов другой передачи. Таким образом, с данными шестернями передаточное число составляет 8:40 или 1: 5, что означает, что 5 оборотов малой шестерни вызывают 1 оборот большой шестерни.(Обратитесь к соответствующему заданию «Испытания с зайцами и улитками», чтобы получить более подробные сведения о концепции передаточных чисел)
- Затем внесите небольшие изменения, как показано на слайде 9, чтобы представить концепцию промежуточных шестерен. Для этого ученики добавляют между первыми двумя шестернями третью шестерню с любым количеством зубцов (24-зубчатая шестерня показана на слайде 9 ).
- После этого упражнения раздайте рабочие листы и попросите студентов написать ответы на два вопроса (также на слайде 10 ).Просмотрите их ответы, чтобы проверить их понимание передаточных чисел. В классе добровольцы делятся своими ответами, а затем обсуждают ответы (представлены на слайде 11 ).
- Когда учащиеся поймут концепцию передаточных чисел, представьте концепцию крутящего момента ( слайд 12 ). Ключевым моментом является то, что при определенных настройках мощности LEGO (или любой другой машины) мощность = крутящий момент x скорость. Если мощность постоянная, объясните, что крутящий момент и скорость обратно пропорциональны. Это означает, что увеличение крутящего момента снижает скорость, и наоборот.
- Завершите обсуждение типов зубчатых колес концепцией червячных передач ( слайд 13 ) и ремней / шкивов ( слайд 14 ). Это включает в себя показ студентам онлайн-описания червячной передачи, анимации и 1:43-минутного видео (ссылки на слайд 14 и в разделе «Дополнительная мультимедийная поддержка»).
- Провести пост-викторину, раздав бумажные копии; Тест также находится на слайде 15 . Ответы представлены на слайде 16 . Словарь терминов и определений представлен на слайде 17 .Затем проведите сопутствующие действия.
Сопутствующие мероприятия
Словарь / Определения
дизайн: Свободно определяемое искусство создавать то, чего не существует.
шестерня: вращающаяся часть машины с нарезанными зубьями, которые входят в зацепление с другой зубчатой частью для передачи крутящего момента; в большинстве случаев зубья обеих шестерен идентичны по форме.
шкив: колесо на оси, которое предназначено для поддержки движения и изменения направления с помощью троса / ремня / цепи по его окружности.
крутящий момент: тенденция силы вращать объект вокруг своей оси или поворота.
Оценка
Оценка перед уроком
Предварительный тест: Перед началом урока проведите предварительный тест Gears из двух вопросов, раздав бумажные копии (также на слайде 2).Предварительная викторина оценивает предыдущие знания учащихся о механизмах и механизмах с зубчатыми колесами. Ответы приведены на ключе с ответами перед тестированием Gears (и на слайде 3).
Оценка после введения
Проверка понимания: Попросите учащихся ответить на два вопроса, представленных в Рабочем листе «Начало работы» (также на слайде 10), чтобы проверить, насколько они понимают механизмы зубчатой передачи и соответствующее влияние на скорость выходной шестерни. См. Ответы на ключе с ответами на листе ответов на листе Gear (и на слайде 11).
Итоги урока, оценка
Пост-викторина: В конце урока проведите после-викторину Gears с двумя вопросами, раздав бумажные копии (также на слайде 15). Просмотрите ответы студентов, чтобы оценить, как их знания о шестеренках изменились во время урока, и оценить, понимают ли они, как применять свои знания. Ответы представлены на ключе ответов после викторины Gears (и на слайде 16).
Дополнительная поддержка мультимедиа
Во время презентации урока покажите учащимся отличное 11-минутное видео «Основы снаряжения», чтобы познакомить их с механизмами, подходящими для 4–9 классов.Обсуждаемые темы: типы шестерен, вращение шестерен, передаточное число, скорость вращения, механическое преимущество и примеры использования (речные шлюзы и велосипеды). https://www.youtube.com/watch?v=odpsm3ybPsA
Во время презентации урока покажите учащимся описание и анимацию червячной передачи на https://en.wikipedia.org/wiki/Worm_drive, а также ее применение в видео длительностью 1:43 «Редуктор скорости червячной передачи» по адресу https: / /www.youtube.com/watch?v=S3XAeMCeZr0.
Рекомендации
«Шестерня.»Последнее обновление: декабрь 2013 г. Википедия, The Free Encyclopedia. Проверено в декабре 2013 г. http://en.wikipedia.org/wiki/Gear
.«Крутящий момент». Последнее обновление: декабрь 2013 г. Википедия, Бесплатная энциклопедия. По состоянию на декабрь 2013 г. http://en.wikipedia.org/wiki/Torque
Авторские права
© 2014 Регенты Университета Колорадо; оригинал © 2013 Кураторы Университета МиссуриАвторы
Сачин Наир, Пранит Самарт, Сатиш С.НаирПрограмма поддержки
Программа GK-12, Центр вычислительной нейробиологии, Инженерный колледж, Университет МиссуриБлагодарности
Учебная программа была разработана в рамках гранта GK-12 Национального научного фонда. DGE 0440524. Однако это содержание не обязательно отражает политику Национального научного фонда, и вам не следует предполагать, что оно одобрено федеральным правительством.
Последнее изменение: 19 января 2021 г.
Mechatronica: 3D-принтеры и роботы
Проектирование и создание роботов и других мехатронных конструкций было упрощено благодаря продолжающемуся развитию технологии 3D-печати, но и здесь не обошлось без проблем. Детали, напечатанные на 3D-принтере, не совсем такие же, как их более дорогие механически обработанные и формованные собратья, и мы должны учитывать допуски, отделку поверхности и другие производственные ограничения.Но оно того стоит: ничто не сравнится с воплощением в жизнь вашего собственного творения. Итак, как вы подойдете к разработке деталей для 3D-печатного робота?
Робототехника: основы системы движения
С механической точки зрения робототехника означает системы движения: как заставить робота перемещать руку или колесо? Как мы переведем двигатель на 6000 об / мин на вращение карусели на 10 об / мин? Ключ, конечно же, в переключении передач.
Во всех передачах нужно думать прежде всего о двух шагах и количестве зубьев.(Угол давления также следует учитывать, но мы поговорим об этом чуть позже.)
Шаг шестерни относится к размеру зубьев. Представьте, что у нас есть шестерня диаметром 1 дюйм с 32 зубьями, которая становится шестерней с 32 шагами. (Диаметр шага относится к теоретическому диаметру шестерни, который является эффективным диаметром для плеча рычага шестерни, что означает, что мы используем средний диаметр как для расчета рычага между усилиями, передаваемыми шестернями, так и передаточных чисел).
Точно так же в метрической передаче модуль выражает изменение диаметра на зуб: шестерня диаметром 24 мм с 12 зубьями является шестерней модуля 2.Только шестерни одного шага или модуля могут работать вместе.
Количество зубьев говорит нам о том, какое усилие мы получим от пары шестерен. Если у нас есть две шестерни с 32 шагами, а ведущая шестерня имеет 32 зуба, а пассивная шестерня имеет 128 зубьев, то ведущая шестерня будет вращаться четыре раза за каждый оборот пассивной шестерни, а пассивная шестерня будет примерно четыре раза крутящий момент (приблизительно, потому что трение снимет небольшую часть мощности).
Зубчатые передачи для разработки робототехники обычно делятся на один из четырех типов или их комбинации: цилиндрические зубчатые колеса, внутренние зубчатые колеса, червячные зубчатые колеса и реечные шестерни.Первые два из них помогут вам замедлить или ускорить вращательное движение, а рейка и шестерня переведут это вращение в линейное движение.
Схема центровки оптического датчика маятникаЧервячные шестерни немного более гибкие: когда червяк взаимодействует с цилиндрической шестерней, она может быть очень эффективным редуктором (червячные шестерни обычно действуют как однозубая шестерня с одним длинным зубцом ”, Обернутого вокруг вала, поэтому вы получаете феноменальное уменьшение за один шаг, устраняя сложную коробку передач).Но червяки также обычно используются в линейных приводах, где червяк (или винт) имеет гайку, перемещающуюся по его длине, переводя вращательное движение двигателя в линейное движение с низким люфтом.
Люфт? Что это? Рад, что ты спросил. Люфт в зубчатых передачах — это количество движения, которое вы можете получить на одном конце системы, когда другой конец системы неподвижен.
Например, если у вас незакрепленная коробка передач, вы можете повернуть выходной вал на несколько градусов, даже если двигатель на входном валу полностью зафиксирован.Вы можете почувствовать это в своей машине, когда находитесь на холме; даже после того, как вы выключили двигатель и включили передачу, он все равно движется, когда вы отпускаете тормоз. В идеале мы хотим минимизировать люфт в системе передач, чтобы движение было предсказуемым.
Мы также хотим разработать зубчатые колеса с плавной и постоянной передачей мощности, но с цилиндрическими зубчатыми колесами возникает общая проблема, если только вы не получите правильную форму.
Например, представим, что мы создаем две шестеренки в форме звезд, как показано на изображении ниже.Шестерня слева — это ведущая шестерня (прикрепленная к двигателю), а шестерня справа получает энергию и соединена с колесом. Что произойдет, когда мы попробуем погонять этого робота вперед?
Вначале ведущая шестерня имеет острие, упирающееся в выемку на шестерне колеса. Плечо низкое, потому что плечо рычага от центра шестерни до точки намного дальше, чем выступ до точки (изображение слева). Но когда две шестерни вращаются, ситуация меняется на противоположную, и ведущая шестерня будет иметь сильный рычаг (как на изображении справа).
Это означает, что если двигатель имеет постоянную мощность и колесо имеет постоянную силу сопротивления, то результирующее движение будет рывками. Как ни круто танцуют роботы, это не очень хорошо для вашего творения. Какое решение?
К счастью, зубчатые передачи существуют достаточно давно, поэтому существует отличное геометрическое решение этой проблемы: эвольвентные зубья шестерни. Чего-чего?
Эвольвентные зубья обеспечивают плавную передачу мощности за счет сохранения постоянного соотношения рычагов между двумя шестернями, и они делают это, имитируя идеальную систему шкивов.(Не путать с системой идеальных отжиманий, определяющей туловище, хотя в этом дизайне ваш робот будет хорошо выглядеть двусложным.)
Представьте, что вместо шестеренок у вас есть две стойки, и веревка много раз наматывается на одну стойку, а также на вторую стойку. Когда мы наматываем больше веревки на вторую стойку, первая будет вращаться; и, что более важно, вращение и передача мощности между этими двумя стойками будут плавными и постоянными. Конструкция эвольвентной шестерни имитирует этот идеальный сценарий, придавая зубьям шестерен форму разматываемой струны.
Эвольвентная струнаИ здесь нам нужно снова подумать об угле давления. Если два шкива или стойки соприкасаются, тогда угол давления будет равен нулю, и не будет места для зубьев шестерни.
Чем дальше друг от друга мы размещаем две основные окружности — две окружности, представляющие идеальные шкивы — тем выше угол наклона. Большие углы тангажа становятся более эффективными для передачи мощности, но за счет пространства и бесшумности; угол давления в 20 градусов является типичным для большинства зубчатых передач для хорошего баланса свойств.
Проектирование эвольвентных передач в CAD / CAM
К сожалению, в большинстве программ CAD нет кнопки «создать эвольвентную шестерню», поэтому вам придется создавать эти геометрические формы вручную. К счастью, этот процесс довольно прост, как только вы увидите его в действии, и иметь плавного робота того стоит. В этом руководстве я проведу вас через процесс в SolidWorks, и вы можете использовать аналогичную систему для любой другой программы.
Эвольвентная шестерня в SolidworksИтак, теперь у вас есть почти идеальная трехмерная шестерня в SolidWorks — можете ли вы распечатать ее и добавить в свой дизайн? Почти, но не все так просто.
Шестерни для 3D-печати
Как и в случае любого метода производства, чтобы получить хороший конечный продукт, вам нужно посмотреть на разумные допуски для того, как создается ваш дизайн, и это особенно важно для шестерен, напечатанных на 3D-принтере.
С помощью обработанной металлической шестерни на хорошем станке с ЧПУ легко изготавливать шестерни с допусками всего лишь 0,005 дюйма. Это означает, что вы можете без проблем рассчитывать на качественные шестерни вплоть до шага примерно 64, а при необходимости можете даже производить шестерни со 128 шагами.Но при использовании некоторых методов 3D-печати допуски могут достигать 0,020 дюйма — в четыре раза больше размера, — и вы захотите соответственно увеличить шестерни.
Насколько маленький слишком маленький?
Для своих дизайнов я использую 10-кратное практическое правило: шаг должен быть в десять раз больше допустимого. Это означает, что минимальный размер зуба для зубчатого колеса с печатью FDM с допуском 0,020 дюйма будет 0,20 дюйма — в основном, вы можете легко напечатать 5-шаговые зубчатые колеса. Если вы хотите немного отшлифовать конечный продукт, вы можете снизить это до 5-кратного правила проектирования, но я бы порекомендовал вместо этого перейти к процессу с более тонкими допусками, например SLS, который с его 0.Допуск 010 дюймов, позволяет легко создавать шестерни в диапазоне 10 шагов.
В таблице ниже показаны рекомендуемые методы печати для разного шага шестерен. Хотя это всего лишь руководство, оно хорошо сработало для моих проектов робототехники в прошлом, и я рекомендую следовать ему, пока у вас не появится больше опыта.
Рекомендуемые методы печати для различных шагов шестеренНадпечатка и трение на 3D-принтах
Предупреждение: не все услуги 3D-печати равны.Когда машины настроены, они должны быть откалиброваны для достижения идеальных допусков, и не все полиграфические службы берутся за это. Например, большинство неоткалиброванных машин FDM будут постоянно печатать с размерами примерно на 0,5 мм (0,020 дюйма) больше, чем файл 3D-модели.
СтанкиFictiv откалиброваны таким образом, что ожидаемый допуск составляет всего 0,25 мм. Это не означает, что вы не можете использовать принтер школьной научной лаборатории для роботизированных деталей, но это означает, что вы должны учитывать дополнительный размер шага, необходимый для плавной работы деталей.
Аналогичным образом, выбирая способ печати дизайна, подумайте о материалах и отделке. Такие методы печати, как PolyJet, позволяют получить очень гладкую поверхность, что отлично снижает трение. Точно так же нейлон SLS — отличный материал с низким коэффициентом трения, но поскольку SLS имеет шероховатую порошкообразную поверхность, ваши конструкции потребуют легкого шлифования для хорошей работы.
Найдите время, чтобы ознакомиться с нашим руководством по материалам и примечаниями по материалам с низким коэффициентом трения в нашей статье о конструкции движущихся частей, чтобы получить дополнительную информацию.
Poppy, робот-гуманоид с открытым исходным кодом, напечатанный на 3D-принтереApplied Robotics
Может быть, вы не будете проектировать следующую семейную горничную Джетсона или костюм Железного человека, но с небольшим геометрическим рисунком и вниманием к материалам воплотить в жизнь ваш следующий роботизированный дизайн с помощью 3D-печати — это абсолютно выполнимо.
У вас есть дизайн, который вы готовы распечатать? Ознакомьтесь с нашими услугами по 3D-печати, чтобы начать работу.
Знаете еще одного мечтателя, который хочет спроектировать и построить робота? Не стесняйтесь присылать им эту статью, чтобы воплотить их мечты в реальность!
Передаточное число — MAE3
Dr.Натан Делсон
При проектировании машины часто требуется включить передачу энергии между источником энергии и желаемым выходным движением. Примеры элементов передачи мощности включают: шестерни, фрикционные приводы, зубчатые ремни, плоские ремни, рычаги и винтовые передачи.
Силовая передача часто включает передаточное число или механическое преимущество. Передаточное число может увеличить выходной крутящий момент или выходную скорость механизма, но не то и другое вместе.Классический пример — шестерни на велосипеде. Можно использовать низкую передачу, которая позволяет легко крутить педали в гору, но с меньшей скоростью велосипеда. И наоборот, высокая передача обеспечивает более высокую скорость велосипеда, но для поворота кривошипа педали требуется больший крутящий момент. Этот компромисс в основном связан с законом сохранения энергии и является ключевой концепцией Mechanical Advantage. С заданным источником питания вы можете достичь либо высокой выходной скорости, либо высокой выходной мощности / крутящего момента, но не того и другого вместе.
Механическое преимущество относится к увеличению крутящего момента или силы, достигаемого механизмом через элемент передачи мощности.Для вращающихся устройств термин «передаточное число» используется для определения механического преимущества. Термин «механическое преимущество» используется для описания компонентов, которые включают перевод. Приведенный ниже анализ показывает, как рассчитать передаточное число и механическое преимущество компонента передачи мощности.
Уравнения энергии и мощности
Закон сохранения энергии гласит, что в выходном движении нельзя получить больше энергии, чем обеспечивает источник энергии. Действительно, при передаче энергии всегда есть некоторая потеря энергии.Уровень потерь энергии может варьироваться от 5% для плоскоременной передачи до 80% для многоступенчатой зубчатой передачи (также могут встречаться более высокие и более низкие скорости).
Перед анализом сначала определим некоторые обозначения:
P => Мощность
E => Энергия
Вт => Работа
f => Сила
τ => крутящий момент
d => расстояние поступательного движения
θ => угол вращательного движения (в радианах)
v => скорость поступательного движения
ω => угловая скорость (в радианах в секунду)
δ => изменение
Pd => Диаметр шага
n => количество зубьев на шестерне
nrev => количество оборотов
Для базового анализа передаточных чисел мы сначала пренебрегаем потерями на трение, а затем учитываем их влияние отдельно.Исходя из этого предположения, мы можем установить мощность равной выходной мощности.
Pin = Pout
Мощность определяется как изменение энергии, деленное на изменение во времени.
P = δE / δt
В механизме энергия передается за счет механической работы. Для поступательного движения работа определяется по формуле:
Работа = Сила X Движение (где сила и движение параллельны друг другу)
W = f δd
Соответствующее определение работы для вращательного движения дает :
Работа = крутящий момент X вращательное движение
W = τ δθ
В передаче энергии Работа является источником изменения энергии, и, таким образом:
P = δE / δt = W / δt
Подставляя вращательное определение работы в вышеприведенное уравнение и отмечая, что скорость вращения задается как ω = δθ / δt, передача мощности во вращающемся устройстве определяется как:
P = W / δt = τ δθ / δt
P = τ ω
Аналогичным образом для поступательного движения передача мощности определяется по формуле:
P = W / δt = f δd / δt
P = fv
Зубчатая передача внизу с входной шестерней слева и выходной шестерней справа.Для целей этого анализа мы предполагаем, что входная шестерня может быть прикреплена к двигателю, а выходная шестерня прикреплена к валу на машине, которая выполняет желаемую функцию.
Как показано, входная шестерня вращается против часовой стрелки с угловой скоростью ωin, а выходная шестерня вращается по часовой стрелке с угловой скоростью ωout. Входной крутящий момент τin прикладывается двигателем к входной шестерне, а противоположный выходной крутящий момент τout применяется машиной к выходной шестерне.Радиус шестерен показан на шаге круга шестерни, который находится между верхом и низом зуба шестерни, и представляет радиус, при котором происходит контакт между двумя шестернями.
Формы зубчатых колес были значительно оптимизированы для снижения потерь на трение, обеспечения плавной передачи мощности и снижения шума. Более подробное описание зубчатых колес и рекомендаций по их проектированию предоставлено Boston Gear на сайте www.bostongear.com. Предоставляются местные экземпляры Boston Gear Engineering Information и Каталог прямозубых зубчатых колес.
Форма зубьев шестерни такая же, как на входной и выходной шестернях, поэтому на более крупной шестерне больше зубьев. Шаговое расстояние Pd — это расстояние между шестернями. Таким образом, количество зубьев шестерни, умноженное на шаг, равно длине окружности шестерни. Соответственно,
Pd nin = 2 π rin
Pd nout = 2 π rout
nin / nout = rin / rout
Пара шестерен анализируется со следующими предположениями:
Квазистатический анализ (предполагается, что шестерни вращаются с постоянной скоростью, и, таким образом, моментами ускорения можно пренебречь)
Потери на трение не учитываются (трение может быть значительным, и его следует рассматривать отдельно!)
Зубья шестерни зацепляются друг с другом (без скачков шестерен!)
Поскольку потери на трение отсутствуют, входная и выходная мощность могут быть установлены равными друг другу как:
Pin = τin ωin
Pout = τout ωout
τin ωin = τout ωout
•
Теперь нам нужно рассмотреть относительную скорость двух шестерен, которая определяется rmined зацеплением зубов.Поскольку зубья зацепляются, мы знаем, что одинаковое количество зубцов должно приходиться на обе шестерни. За каждый оборот входной шестерни через площадь зацепления проходит следующее количество зубьев, где nrevin — количество оборотов входной шестерни:
количество зубьев, которые входят в зацепление = nrevin 2 π rin / Pd
Применение того же уравнения к выходной шестерне и установка количества зубьев в зацеплении, равного друг другу, дает:
nrevout 2 π rout / Pd = nrevin 2 π rin / Pd
Вышеприведенное уравнение упрощается до:
nrevout / nrevin = rin / rout
Если мы умножим количество оборотов на 2π, мы получим угол поворота обеих шестерен в радианах, что дает:
rin δθin = route δθout
•
Если мы разделим угол поворота на время, δt, то мы получим отношения угловых скоростей в радианах в секунду
ωout / ωin = rin / rout
Альтернативный Интерпретация состоит в том, что угловая скорость в точке зацепления одинакова для обеих шестерен.Так как скорость точки на вращающемся объекте определяется выражением rω. Равенство скоростей в точке сетки определяется следующим образом:
•
rin ωin = route ωout
•
И мы видим, что два предыдущих уравнения идентичны.
Поскольку радиус шестерни пропорционален количеству зубьев, соотношение скоростей может быть выражено в терминах количества зубьев на входной и выходной шестернях. Просто подставьте в приведенное выше уравнение, что nPd = 2πr для обеих шестерен, чтобы получить:
ωout / ωin = nin / nout
Теперь мы можем объединить уравнение мощности с уравнением скорости, чтобы получить соотношение входного и выходного крутящих моментов. :
τin ωin = τout ωout (уравнение мощности)
•
τout / τin = ωin / ωout
•
τout / τin = rout / rin (подставляем в соотношение скоростей)
•
Таким образом когда входная шестерня меньше выходной шестерни:
Выходной крутящий момент выше входного крутящего момента
Выходная скорость ниже входной скорости (т.е.е. меньшая шестерня должна совершать больше оборотов, чем большая шестерня)
Основные уравнения для зубчатой пары:
τin ωin = τout ωout (равенство мощностей)
ωout / ωin = rin / rou (отношение скоростей в единицах радиусов)
ωout / ωin = nin / nout (соотношение скоростей с точки зрения количества зубьев)
τout / τin = routed / rin (отношение крутящих моментов с точки зрения радиусов)
τout / τin = nout / nin (соотношение крутящего момента с точки зрения количества зубьев)
Передаточное число определяется как входная скорость относительно выходной скорости.Обычно это записывается как:
Передаточное число = ωin: ωout
(PDF) Характеристика и экспериментальная оценка ошибок зубчатой передачи в промышленном роботе
Только для ознакомления
9
Dagalakis, NG, и Майерс, Д.Р. (1985), «Регулировка люфта шарнирного механизма робота с помощью метода возбуждения шарнирного соединения робота
», International Journal of Robotics Research, Vol. 4,
№ 2, с. 65-79.
Eastwood, S.J. (2004), «Отображение и анализ ошибок для гибридных кинематических машин», докторская диссертация,
Ноттингемский университет, Ноттингем.
Иствуд, С. и Уэбб, П. (2009), «Анализ значимости ошибок и компенсация для HPKM»,
Промышленный робот: Международный журнал, Vol. 36, No. 1, pp. 27-35.
ISO 9283 (1998), Манипулирование промышленными роботами — критерии производительности и соответствующие тесты
Методы, Международная организация по стандартизации, Женева, Швейцария.
ISO 230–2 (1997), Кодекс испытаний для станков — Часть 2: Определение точности и повторяемость
позиционирования осей с числовым программным управлением, Международная организация по стандартизации
, Женева, Швейцария.
Джадд, Р.П. и Кнасински, А.Б. (1990), «Методика калибровки промышленных роботов с экспериментальной проверкой
», IEEE Transactions on Robotics and Automation, Vol. 6. № 1,
с. 20–30.
Муэланер, Дж.Э., Ван З. и Маропулос П. (2010), «Концепции и анализ аэрокосмического робота с высокой точностью
и высокой производительностью (HAHC)», 21-я Международная конференция по автоматизированному производству компьютеров
(CAPE 2010), Эдинбург, Великобритания.
Oh, Y.T (2011a), «Влияние угловых характеристик шарнира на точность промышленных роботов
», Industrial Robot: An International Journal, Vol. 38, No. 4. pp. 406-418
Oh, Y.T (2011b), «Оценка точности робота с использованием системы шарнирно-стержневой связи», Robotica, Vol.29,
No. 6, pp. 917-927.
Шиаколас П. С., Конрад К. Л. и Йих Т. (2002), «О точности, повторяемости и степени
влияния кинематических параметров промышленных роботов», Международный журнал
Modeling and Simulation, Vol. 22, No. 3, pp. 245-254.
Сламани М., Майер Дж.Р.Р. и Клотье Г.М. (2010), «Моделирование и экспериментальная проверка
ошибок движения станка с использованием полинома, оптимизированного по степени, включая гистерезис движения
», Experimental Techniques Journal, Vol.35, No. 1, pp. 37-44.
Сламани М., Нубиола А. и Бонев И.А. (2012a), «Влияние сервосистем на контурные ошибки
в промышленных роботах», Труды Канадского общества механиков
Engineering, Vol. 36, No. 1, pp. 83-96.
Сламани М., Нубиола А. и Бонев И.А. (2012b), «Оценка эффективности позиционирования
промышленного робота», Industrial Robot: An International Journal, Vol. 39, № 1. С. 57-68.
Сламани, М., Нубиола А., Бонев И.А. (2012c), «Моделирование и оценка ошибки люфта
промышленного робота», Robotica, DOI: 10.1017 / S0263574711001287.
Whitney, D.E. Лозинский К.А. и Рурк Дж. М. (1986), «Метод и результаты прямой калибровки промышленного робота
», ASME Journal of Dynamic Systems, Measurement and Control, Vol. 108,
№ 1, стр. 1-8.
Янг, К. и Пиккин, К.Г. (2000), «Оценка точности современного промышленного робота»,
Industrial Robot: An International Journal, Vol.27, No. 6, pp. 427-436.
Страница 9 из 23 Промышленный робот
1
2
3
4
5
6
7
8
9
10
11
11
15
16
17
18
19
20
21
22
23
24
25
26
27
28
31
32
33
34
35
36
37
38
39
40
41
42
43
45
44
44
48
49
50
51
52
53
54
55
56
57
58
59
60
Литые зубчатые передачи из металлического стекла с волновой деформацией: на пути к снижению стоимости высокопроизводительной робототехники
Прецизионные зубчатые передачи, подобные тем, которые требуются в космических приложениях и в современной робототехнике, часто требуют специально изготовленных компонентов со специальными рабочими характеристиками.Среди желательных свойств для пространства — высокий крутящий момент, точность позиционирования, малая масса, компактная конструкция и работа в экстремальных условиях. Эти требования привели к разработке зубчатых передач с волновой деформацией (SWG), также известных как зубчатые передачи с гармоническим приводом (HD), которые оказали значительное влияние на роботов, станки и космические аппараты 1 . Изобретенные в 1959 году, SWG были впервые использованы в аэрокосмической и оборонной промышленности и в конечном итоге приняты в космические полеты в 1971 году в качестве компонента лунного вездехода Apollo 15 для НАСА 1,2 .С тех пор SWG широко использовались НАСА для космических телескопов (включая Хаббл) и марсоходов (включая Spirit и Opportunity из миссии Mars Exploration Rover). Предлагаемые в настоящее время миссии НАСА к так называемым «ледяным телам», состоящим из таких спутников, как Европа и Титан, а также комет и астероидов, потребуют усовершенствованных систем снаряжения, которые могут работать при чрезвычайно низких температурах. SWG обладают значительными преимуществами по сравнению с обычными зубчатыми передачами, включая высокую точность позиционирования с нулевым люфтом, уменьшенный размер, уменьшенный вес и увеличенные передаточные числа 3 .Эти свойства делают их привлекательным выбором для высокопроизводительных приложений, таких как космос и оборона, но высокая стоимость из-за сверхточного производства ограничивает широкое использование в недорогой, потребительской робототехнике. Из-за сверхточной обработки, необходимой для компонентов SWG, снижение их стоимости является сложной задачей, а выбор материалов ограничен, что привело к тому, что подавляющее большинство SWG изготавливается из стали. Хотя были предприняты некоторые попытки интегрировать недорогие конструкции и материалы с низкой плотностью в SWG, подавляющее большинство по-прежнему изготавливается из стали.Например, внешний шлиц SWG был заменен материалами с низкой плотностью, такими как алюминий, которые были покрыты твердыми материалами для улучшения износостойкости алюминия 1 . Некоторые исследования были сосредоточены на изменении материала гибкого сплайна с использованием композитов углеродное волокно / сталь, высокопрочных полимеров или различных металлических сплавов 4,5 . Таким образом, исследования в области SWG в первую очередь сосредоточены на том, как (1) снизить стоимость, (2) достичь лучших характеристик в предполагаемой среде, (3) снизить массу, (4) интегрировать новые материалы и (5) создать диски меньшего размера.
Работа стального SWG показана на рис. 1. Хотя SWG могут быть сконструированы с использованием различных геометрических форм, три компонента стандартного чашечного типа SWG показаны в разобранном виде на рис. 1a, для CSF- 8 приобретено у Harmonic Drive Systems, Inc., Токио, Япония. Это (1) жесткий внешний шлиц, также называемый круговым шлицем, с внутренними зубьями шестерни, (2) тонкостенный гибкий шлиц с внешними зубьями, число которых на два меньше, чем внешний шлиц, и (3) генератор эллиптических волн из стали. шариковые подшипники, заключенные в эллиптическую дорожку стальной лентой.В собранном состоянии генератор волн заставляет стенку гибкого шины расширяться и зацепляться с зубьями внешней шины. Выходной крутящий момент обычно обеспечивается основанием гибкой шины, в то время как внешний шлиц остается неподвижным. Типичная работа SWG схематически показана на рис. 1c. Генератор волн заставляет зубцы гибкого шлейфа входить в контакт с внешним шлицем, и когда генератор волн вращается, гибкий шлейф упруго деформируется, чтобы поддерживать контакт. После поворота на 180 градусов гибкая шина сместилась на один зуб относительно внешней шины.После полного вращения гибкий и внешний шлицы смещены на два зубца. В отличие от прямозубых и планетарных шестерен, передаточное число SWG зависит не от размера шестерен, а от количества зубьев. Передаточное число i , которое определяется как отношение входной скорости к выходной скорости, составляет:
Рисунок 1Работа зубчатой передачи (SWG).
( a ) Разобранный SWG, показывающий три компонента: внешний шлиц, генератор волн и гибкий контур.( b ) Собранная гибкая линия CSF-8 от Harmonic Drive, LLC. ( c ) Схема, показывающая работу SWG, в которой каждый поворот генератора волн на 180 ° перемещает гибкий шланг на один зуб. ( d ) Схема зависимости крутящего момента нагрузки от количества циклов для SWG, показывающая различные механизмы отказа и способы их проектирования.
, где n cs — количество зубьев на внешней шлице (или круговой шлице), а n fs — количество зубцов на гибкой шлице.Используя это уравнение, SWG может иметь передаточные числа от 30: 1 до 320: 1. Стальные SWG можно приобрести в диапазоне размеров от 20 до 300 мм с внешним диаметром 1 . SWG могут работать с чрезвычайно высокой эффективностью по сравнению с другими зубчатыми передачами, а также имеют низкое трение в зубьях шестерни. Благодаря конструкции зубьев контакт является почти чисто радиальным, что предотвращает значительный износ от трения, который возникает в других зубчатых передачах, даже несмотря на то, что значительный износ часто наблюдается в вышедших из строя SWG 6 .Таким образом, было потрачено много усилий на разработку профиля зуба для SWG, который был оптимизирован в S-образный профиль 3 .
На Рисунке 1d схематически показана кривая нагрузки-срока службы SWG. Хотя SWG могут создавать большое передаточное отношение крутящего момента, они делают это за счет гибкой шины — тонкой обработанной стальной чашки, которая передает крутящий момент между входом и внешним шлицем. Рисунок 1d представляет собой график зависимости крутящего момента от нагрузки от количества циклов (который можно рассматривать как кривую зависимости от нагрузки), который используется для прогнозирования условий эксплуатации SWG.В общем, отказ SWG ограничивается при высоких моментах нагрузки храповым механизмом, который описывается проскальзыванием зубцов гибкого шланга по зубцам генератора волн, вызывая состояние, известное как «дедоидальный». Событие храпового механизма обычно деформирует зубья шестерни на гибком или внешнем шлице и выводит SWG из строя. При высоких рабочих нагрузках, но ниже крутящего момента храповика, SWG в конечном итоге выйдет из строя из-за усталости гибкого шлейфа. При нагрузках ниже усталостной прочности гибкого шланга отказ обычно происходит из-за выхода из строя подшипников в генераторе волн.Исходя из этих кривых «напряжение-срок службы» для SWGS, очевидно, что гибкий шланг должен быть спроектирован из высококачественного металлического сплава, обладающего сочетанием свойств, специально подходящих для этого уникального применения. Для использования в космических кораблях сплав также должен выдерживать экстремальные холода и, в некоторых случаях, работу без смазки. Были предприняты некоторые усилия по разработке новых SWG для космических приложений, включая использование алюминия с покрытием во внешнем шлице и генераторе волн, а также новые компактные конструкции для уменьшения массы 1,6,7 .Однако почти все SWG, используемые НАСА в космических аппаратах, изготовлены из стали со смазкой.
Из-за нагрузок на гибкий шланг, очень немногие материалы подходят для SWG. Гибкий шлейф должен иметь возможность механической обработки в очень тонкую стенку, чтобы допускать изгиб при разумных напряжениях, он должен быть достаточно твердым, чтобы избежать износа зубов, он должен быть достаточно жестким, чтобы избежать трещотки, и он должен быть исключительно устойчивым к усталости. Из-за этих ограничений подавляющее большинство SWG изготавливается из стали (обычно из таких сплавов, как 439 для обычного использования и нержавеющая сталь 304 L или 15–5 с дисперсионным твердением для использования в космосе).Высокая стоимость обусловлена сложной обработкой тонкой гибкой шины, которая, по оценкам, составляет половину общей стоимости изготовления SWG. Чтобы проиллюстрировать это, рассмотрим коммерческие SWG CSG-20 и CSF-8 от Harmonic Drive Systems, Inc. с внешним диаметром гибкой шины приблизительно 50 мм и 20 мм соответственно. Для большей гибкой линии минимальная масса стальной заготовки, используемой для обработки гибкой линии, составляет 463 г, тогда как масса окончательной обработки составляет 28 г, что дает 94% брака во время процесса обработки.Для меньшей гибкой линии минимальная масса стальной заготовки составляет 45 г, а конечной гибкой линии — 3 г, в результате чего процент брака во время обработки составляет 93%. Кроме того, толщина стенки гибкой шины диаметром 20 мм составляет всего 125 мкм у основания зуба, что демонстрирует как сложность механической обработки этой детали, так и ограничения минимального размера, который может быть изготовлен с использованием традиционной обработки. Это основная причина, по которой в меньших компактных SWG не используется геометрия чашки-гибкого сплайна.
SWG — важный компонент многих роботизированных систем, но их широкое распространение сдерживается их стоимостью. Нередко значительная часть стоимости робототехнической системы приходится на SWG. Разработка технологии для снижения стоимости производства SWG не только снижает стоимость существующих систем, в которых используются эти шестерни, но также позволяет создать совершенно новый класс недорогих роботов, которые могли бы их использовать. Это окажет глубокое влияние, особенно на гуманоидную робототехнику, которой обычно требуются SWG в суставах конечностей для обеспечения точного движения.Чтобы снизить стоимость SWG, сложные металлические компоненты могут быть отлиты в почти сетчатую форму или сетчатую форму, однако материал не должен значительно снижать производительность. Было предпринято множество попыток отлить или быстро изготовить гибкие шины SWG, включая литье против штампа, литье под давлением и аддитивное производство. Большинство этих усилий было сделано с пластиками, однако из-за их более низкой вязкости и температуры плавления 8,9 . Объемные металлические стекла (BMG), также известные как аморфные металлы, представляют собой особый класс технических материалов, которые обладают многими свойствами, привлекательными для внедрения в SWG.BMG — это многокомпонентные сплавы (с использованием четырех или более элементов), которые созданы на основе глубокой эвтектики, так что при быстром охлаждении из расплава они образуют некристаллическую микроструктуру. Это придает уникальные свойства по сравнению с кристаллическими металлами, включая высокую прочность, высокую износостойкость, высокую твердость и большой предел упругой деформации 10,11,12,13 . Важно отметить, что низкая температура плавления BMG также позволяет обрабатывать их с использованием технологии литья под давлением, аналогичной пластмассам 14 .Более того, BMG были разработаны с плотностью титановых сплавов (4,5–5,0 г / см 3 ), но с гораздо более высокой твердостью (500 против 350 по Виккерсу) и пределом упругости (2% против 1%) 15 . Недавно было продемонстрировано, что из BMG можно отливать чрезвычайно сложные податливые механизмы с размерами элементов менее 1 мм. 14 . Сочетание сверхвысокой прочности и большого предела упругой деформации привело к производительности, которая обычно была вдвое лучше, чем у титана, и в четыре раза лучше, чем у стали 14 .BMG на основе таких систем, как Ti, Zr, Cu и Ni, могут иметь предел текучести до 2 ГПа с пределом упругости 2%, обусловленным их низким модулем Юнга (<100 ГПа в большинстве сплавов). По сравнению со сталью, которая в настоящее время используется в SWG, большинство BMG устойчивы к коррозии (например, не ржавеют) и неферромагнитны.
BMG может показаться естественным выбором для использования в гибкой линии SWG, но в литературе есть несколько причин, которые могут препятствовать такому использованию. Одна из проблем — это сетчатая отливка гибкого шины, которая содержит как тонкую стенку, так и внешние зубья шестерни.Хотя сложные детали, изготовленные из BMG, были продемонстрированы в литературе, надежный коммерческий процесс литья детали с комбинированными характеристиками гибкого шлейфа не имеет 14 . Несмотря на это неизвестное, BMG демонстрируют две отрицательные особенности для возможного использования в качестве замены стали в гибком шланге: (1) более низкие пределы выносливости, чем у стали, и (2) более низкая вязкость разрушения, чем у стали 16 . Отличительной чертой SWG является способность выдерживать повторяющуюся упругую деформацию стального гибкого шины при одновременной передаче крутящего момента без разрушения.Литература по BMG показывает большой разброс в заявленных значениях усталостной прочности и вязкости разрушения 16 . Ранние BMG на основе Zr имели предел усталостной выносливости около 8% от их предела текучести (по сравнению с более чем 60% у сталей, таких как 304 L и 15–5PH) и вязкость разрушения менее 20 МПа · м 1 / 2 (по сравнению со сталью со значениями> 100 МПа м 1/2 ). Хотя сообщалось, что многие новые BMG обладают более высокой ударной вязкостью и сопротивлением усталости (до 55% от их предела текучести), сталь обычно используется в качестве эталона, с которым сравниваются BMG 17 .
Хотя может показаться, что BMG непривлекательны для SWG, тот факт, что фиксируется смещение гибкой линии, а не нагрузка, означает, что напряжение, испытываемое в гибкой линии, зависит от модуля Юнга материала. Более низкий модуль упругости приводит к более низкому напряжению в гибкой линии, что обеспечивает более высокую прогнозируемую усталостную долговечность. Например, деформация гибкой линии при расширении с помощью генератора волн фиксируется для любого конкретного SWG и может быть рассчитана с использованием аргумента упругого изгиба.Радиус кривизны эллипса, R , равен
, где b и a — это малая и большая оси эллипса, соответственно. Деформация в гибкой линии, ε x , может быть рассчитана из
, где y — половина толщины стенки гибкой линии, а ρ — расстояние от центральной точки гибкой линии до нейтральной точки. ось стенки flexspline. Затем можно рассчитать деформацию гибкой шины, измерив изменение кривизны до и после вставки генератора волн.Для гибкого провода диаметром 20 мм (CSF-8) и гибкого провода диаметром 50 мм (CSG-20) рассчитанные деформации гибкого провода составляют 0,038% и 0,058%, соответственно, с использованием минимальной толщины стенки в основании зубы. Поскольку геометрия гибких линий является фиксированной, напряжение σ FS может быть рассчитано для любого желаемого материала с использованием модуля Юнга и закона Гука
Для гибкой шины из нержавеющей стали (с модулем Юнга 200 ГПа) упругое напряжение от вставки генератора волн оценивается в 8 и 12 МПа, соответственно, для малых и больших гибких линий.Для известного коммерческого BMG, LM1b (Zr 44 Ti 11 Ni 10 Bu 10 Be 25 ), расчетное напряжение для малого и большого приводов ниже и составляет 3,6 и 5,5 МПа соответственно. , из-за гораздо более низкого модуля Юнга 95 ГПа. Для усталостного разрушения амплитуда напряжения (отношение напряжения нагрузки к пределу текучести) должна превышать предел усталостной выносливости (максимальное выдерживаемое напряжение 10 7 циклов). Используя литературные значения для нержавеющей стали 304 L и 15–5PH, было подсчитано, что стальные гибкие шины подвергаются упругой нагрузке между 1–3% предела усталостной выносливости для малых гибких шин и 1–5% для больших гибких шин.Напротив, из-за их низкого модуля и высокой прочности, BMG, по оценкам, упруго деформируется до 0,4–2,5% от предела усталостной выносливости для небольшого гибкого шлейфа и 0,5–4% для большого гибкого шлейфа, используя большой разброс сообщил значения утомляемости из литературы. Этот анализ показывает, что гибкие шины BMG должны иметь такой же или более длительный усталостный ресурс, чем стальные версии, из-за их более высокой эластичности и предела текучести, даже несмотря на то, что BMG по своей природе более хрупкие. Однако анализ также показывает, что, если бы гибкие шины были нагружены только упруго волновым генератором, отказ из-за усталости никогда не произошел бы (подшипники в волновом генераторе всегда выходили из строя первыми).Поскольку график на рис. 1d показывает, что усталость гибкого шлейфа является основным видом разрушения при высоких моментах нагрузки, напряжение на гибком шлейфе от передачи нагрузки в зубьях шестерни намного выше, чем просто упругое расширение от генератора волн.
Коробки передач и ожидаемый срок службы
Коробки передач сами по себе являются сложной задачей. Уравнения движения, необходимые для создания зубьев шестерни, довольно сложны. А вопросы, связанные с надежностью коробки передач, еще сложнее.Параметры качества — точность и грузоподъемность. Но стоимость всегда является важным фактором, и в конечном итоге производительность каждой системы необходимо измерять в контексте ее ожидаемого срока службы.
Одной из самых сложных частей автомобиля является трансмиссия, представляющая собой многоступенчатый зубчатый редуктор, который «настраивает» диапазон скоростей двигателя на желаемый диапазон скоростей транспортного средства на уровнях мощности в несколько сотен лошадиных сил. Что делает это настолько необычным, так это то, что все работает почти полностью автоматически.И срок службы коробки передач огромен. Я только что продал машину 15-летней давности, и ее трансмиссия до сих пор работает отлично.
Производственные процессы, связанные с производством зубчатых колес, эволюционировали, чтобы помочь удовлетворить различные требования к производительности при меньших затратах. Традиционный метод нарезания зубчатых колес с использованием станков позволяет получать точные детали, но металлурги обнаружили, что зернистость металла, срезанного механической обработкой, вызывает ослабление зуба шестерни. Порошковая металлургия прогрессировала до такой степени, что было более рентабельным формовать профили шестерен из спеченного порошкового металла и выполнять только чистовую наплавку с помощью процессов механической обработки.Более поздние улучшения в процессе включают возможность загружать материалы с более высокой прочностью, если это необходимо в конструкции, для производства деталей с более высокой прочностью по более низкой цене.
Но по мере увеличения требований к нагрузке все проблемы с производительностью усиливаются. И уникальные условия окружающей среды тоже могут сыграть свою роль. В современной конструкции горизонтальных ветряных турбин конструкция коробки передач является критическим компонентом. Требование к оборудованию на 2,5 мегаватт, безусловно, является проблемой, но добавление необходимости в точности и долговечности, чтобы выдержать 25 лет эксплуатации, делает задачу невероятно сложной.
Есть несколько тонких аспектов работы коробки передач, которые необходимо учитывать. Один из них — обратное напряжение. Как рассчитать обратное напряжение? Это абсолютное значение мощности, удвоенное мощности для простоты, деленное на период времени разворота. Обычно это действительно большое число. И по мере того, как время, отведенное для разворота, уменьшается, число увеличивается.
Не имеет значения, используется ли система серводвигателя на механизме или редуктор на ветряной турбине.Ситуация такая же. Это просто дороже, когда это редуктор весом 30 000 фунтов, который находится на высоте 180 футов над землей на шесте.